(54) РЕГУЛЯТОР МОЩНОСТИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСУЛВА
1
Изобретение относится к регулируёмым электроприводам и электрооборудованию подвижного, состава и предназначено для минизации потерь электроэнергии в приводе, сокращении расхода энергии на тягу поездов.
Известен регулятор мощности тяговых электродвигателей подвижного состава, содержащий регуляторы тока возбуждения и якоря двигателей, вход последнего из которых соединен с выходом формирователя управляющего сиг-нала, подключенного соответствующими входами к задатчику и датчику силы тяги и скорости, датчикам токов якоря и возбуждения, а выход - с входом функционального преобразователя тока якоря. Кроме того, устройство содержит трансформатор, реакторы, фильтры, вентильные преобразователи, редукторы 1 ..
Известный регулятор мощности электроподвижного состава содержит эле.менты, потери энергии в которых соизмеримы с потерями в двигателе, а также снижают точность регулирования.
Целью изобретения является повышение точности регулирования.
Эта цель достигается тем, что устройство снабжено сумматорами, блоком
умножения, элементами сравнения, функциональными преобразователями скорости и тока возбуждения и квадраторами, ВХОДЫ;которых .подключены к соответствующим датчикам тока якоря и возбуж-;. дения, подключенным к одним из входов соответствующих сумматоров,другие входаа которых соединены с выходами квадраторов, при этом третий вход
10 первого сумматора соединен с, выходом блока умножения, входцл которого подключены к выходам функциональных преобразователей скорости и тока возбуждения, соединенных входами с соот15ветствующими датчиком скорости и датчиком .тока возбуждения, а выходы сумматоров подключены к соответствуюг4им входам первого элемента сравнения,вы-f, ход которого соединен с одним из входов второго элемента сравнения, подключенного другим входом к выходу функционального преобразователя тока якоря, а выход - к входу регулятора тока возбуждения.
25
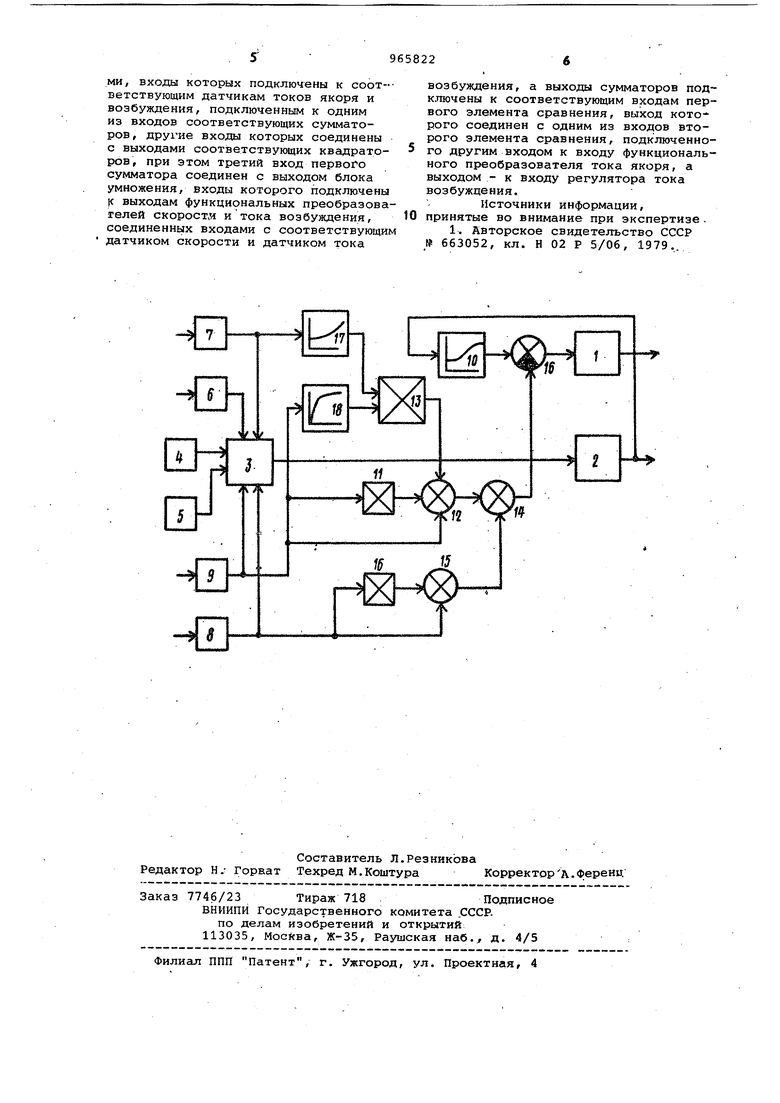
На чертеже представлена блок-схема регулятора мощности тяговых элект.родвигателей подвижного состава.
Устройство содержит регулятор 1 тока возбуждения и регулятор 2 тока
30 якоря, вход которого соединен с выХОДОМ формирователя 3 управляющего сигнала, подключенного к задатчику 4 и 5 и датчику 6 и 7 силы тяги и скорости, датчикам 8 тока якоря и 9тока возбуждения, а выход с входом функционального преобразователя 10тока якоря. Устройство содержит также квадратор 11, вход которого соединен с датчиком 9 тока возбуждения, а выход- с одним из входов сумма тора 12, другой вход которого соединён с выходом блока 13 , умножения, а третий с датчиком 9 тока возбуждения, а выход - -с одним из входов эле WaTa 14 сравнения, другой вход кото рого подключен к.выходу сумматора 15 а выход , к одному из входов элемента 16 сравнения, при этом входы сумматора 15 соединены с выходом квадра тора 16 и датчиком 8 тока якоря.Устройство содержит функциональные преобразователи 17 и 18 скорости и тока возбужденияJ В силовых цепях электроподвижного состава при заданной скорости движения и силе тяги локомотива минимум потерь мощности достигается при выполнении условия: )8-%.4 0 где Л - токи, R - активные сопротивления, К - постоя нные коэффициенты для обобщенных параметров всех элементов силовой цепи, соот ветственно для цепи якоря с индексом я, а возбуждения с индексом В. Регулятор мощности тяговых электродвигателей подвижного состава рабо тает следующим образом. Сигналы задатчиков 4 и 5 силы тяги и скорости движения, ..одноименных датчиков 7 и б, а также датчиков 9 и 8 поступают на вход формирователя 3 управляющего сигнала, который осуществляет управление регулятором 2 тока якоря. Выходной сигнал регулято ра по цепи обратной связи через функциональный преобразователь 10, в котором реализуется заданная зависимость Dg f(39) (тока возбуждения от тока якоря), подается на элемент 16 сравнения. Выходной сигнал послед него поступает на вход регулятора 1 тока возбуждения.Регуляторы токов ; возбуждения и яКоря реализуют таким об разом заданные параметры регулирования. Сигнал датчика 9 тока возбуждения одновременно подается через функциональный преобразователь 18 на вход блока 13 умнои ения, на второй вход которого через .функциональный преобразователь 17 поступает сигнал с дат чика 7 скорости. Выходной сигнал блока умножения суммируется с сигна лом датчика 9 тока возбуждения и сигналом, пропорциональным квадрату тока возбуждения, полученным на выходе квадратора 11, Таким образом на выходе сумматора 12 получаем величину, пропорциональную потерям мощ-, ности в цепи возбуждения. На выходе сумматора 15 формируется сигнал, пропорциональный потерям мощности в цепи якоря. Сигналы с выходов сумматоров 1 и 12 поступают на элемент 14 сравнения, где завершается формирование условия 1. При выполнении этого условия величины токов якоря и возбуждения однозначны и соответствуют минимуму потерь мощности в силовых цепях электроподвижного состава. Формирующийся на выходе элемента 14 сигнал коррекции равен нулю и регулятор работает по основному алгоритму от задатчиков, формирователя управляющего сигнала и функционального преобразователя 10, При невыполнении условия 1 на выходе элемента 14 сравнения вырабатывается сигнал, пропорциональный ;pacfсогласованию мощностей потерь в контурах регуляторов токов возбуждения и якоря с учетом знака рассогласования, и на элементе 16 сравнения производится коррекция выходного сигнала функционального преобразователя 10 .тока якоря с воздействием последнего на регулятор 1 тока возбуждения. Сигнал управления приводится в соответствие с условием 1, Таким образом, предлагаемый регулятор мощности поддерживает минимальное значение потерь энергии в силовых цепях электроподвижного состава во всем диапазоне изменения токов якоря и возбуждения. Использование предлага емого регулятора дает значительный экономический эффект и повышает точность регулирования. Формула изобретения Регулятор мощности тяговых электродвигателей подвижного состава, содержащий регуляторы тока возбуждения и якоря двигателей, вход последнего из которых соединен с выходом формирователя управляющего сигнала, под,ключенного соответствующими входами iK задатчику и датчику силы тяги и скорости, датчикам токов якоря и возбуждения , а выход - с входом функционального преобразователя тока якоря, отличающийся тем, что, с целью повышения точности регулирования, он снабжен сумматорами, блоком умножения, элементами сравнения,функциональными преобразователями скорости и тока возбуждения и квадраторами, входы которых подключены к соот-ветствующим датчикам токов якоря и возбуждения, подключенным к одним из входов соответствующих сумматоров, другие входы которых соединены с выходами соответствующих квадраторов, при этом третий вход первого сумматора соединен с выходом блока умножения, входы которого подклю чены 1 выходам функциональных преобразователей скорости и тока возбуждения, соединенных входами с соответствующим датчиком скорости и датчиком тока
возбуждения, а выходы сумматоров подк.11ючены к соответствующим входам первого элемента сравнения, выход которого соединен с одним из входов второго элемента сравнения, подключенного другим входом к входу функционального преобразователя тока якоря, а выходом - к входу регулятора тока возбуждения.
Источники информации, принятые во внимание при экспертизе .
1. Авторское свидетельство СССР № 663052, кл. Н 02 Р 5/06, 1979,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговыми электродвигателями подвижного состава | 1984 |
|
SU1147610A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2349466C2 |
| Способ регулирования силы тяги и скорости электроподвижного состава | 1981 |
|
SU958158A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Устройство для регулирования скорости тягового электродвигателя электроподвижного состава | 1986 |
|
SU1567419A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Устройство для электрического торможения электроподвижного состава переменного тока | 1982 |
|
SU1079491A1 |
