Изобретение относится к машиностроению, преимущественно сельскохозяйственному и транспортному, в частности к тракторам и другим самоходным машинам.
Целью изобретения является повышение надежности и экономичности работы тягового средства путем повышения стабильности работы первичного двигателя при колебаниях тяговой нагрузки.
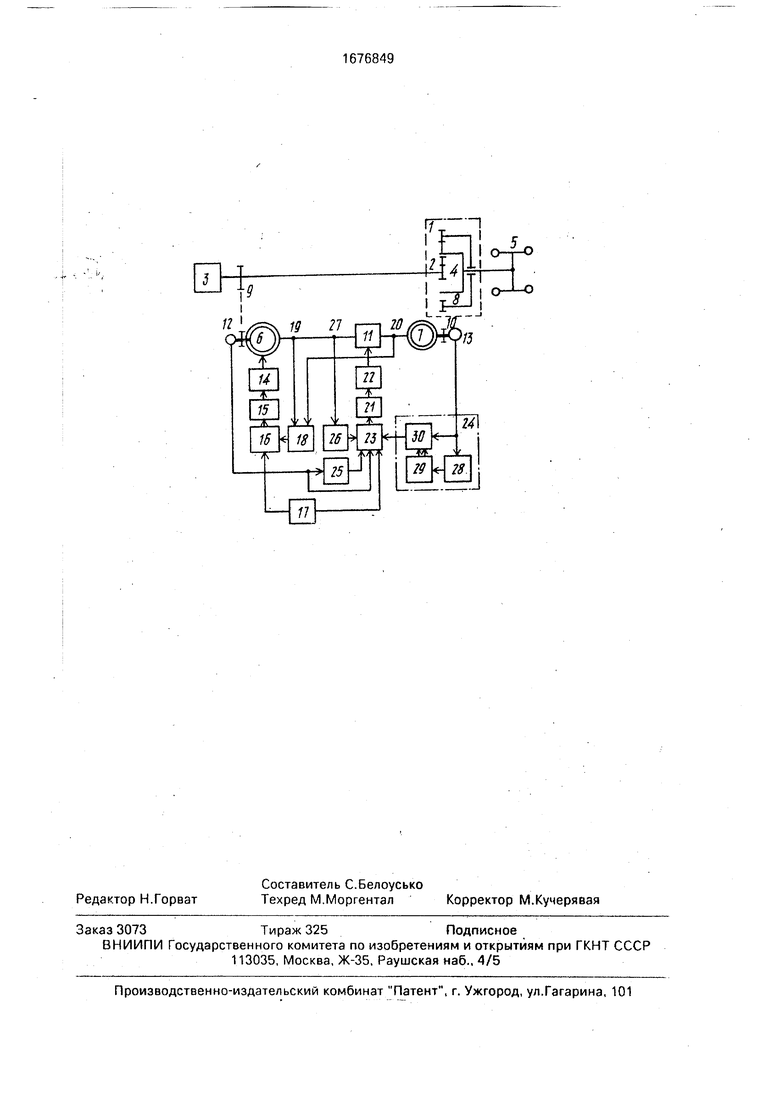
На чертеже изображена принципиальная схема электромеханической двухпоточ- ной передачи переменного тока.
Двухпоточная электромеханическая передача содержит дифференциальный механизм 1, с первым входным звеном 2 которого связан тепловой двигатель 3, а с выходным звеном 4 - движители 5, и электрическую передачу, включающую электрический генератор 6 и электрический двигатель 7, из которых первый связан с
первым входным звеном 2 механизма 1, а второй - со вторым входным звеном 8 посредством механических передач 9 и 10. Генератор 6 и двигатель 7 связаны между собой электрически посредством регулятора 11 частоты вращения двигателя 7 - преобразователя частоты - и имеют на валах два датчика 12 и 13 частоты вращения. С генератором 6 связан регулятор возбуждения 14, блок управления 15 которого соединен с блоком суммирования 16, связанным с задатчиком 17 и функциональным блоком 18, связанным в свою очередь с датчиками напряжения 19 и магнитного потока 20. Блок управления 21 системы управления 22 преобразователя частоты 11 соединен с блоком суммирования 23, связанным с эа- датчиком 17, функциональным блоком 24, датчиком 12 частоты вращения генератора и блоками дифференцирования 25 и 26,перо XI о
00
N о
вый из которых соединен с датчиком 12, а второй - с датчиком 27 тока якоря электрических машин, Функциональный блок 24 со- единен с датчиком 13 и включает формирователь 28, переключатель 29 и сумматор частот 30 с прямым и инверсным входами для получения сигнала как для двигательного, так и для генераторного режимов работы двигателя 7.
Двухпоточная электромеханическая передача тягового средства работает следующим образом.
В установившемся статическом режиме крутящие моменты первичного двигателя 3 и электрического двигателя 7 суммируются дифференциальным механизмом 1 и уравновешиваются моментом статического сопротивления на его выходном звене 4.
В переходных режимах при изменении тяговой нагрузки на движителях 5 или при изменении сигнала управления со стороны водителя переходный процесс установления новой скорости движения заканчивается установлением новых частот вращения двигателей 3 и 7, причем в обоих случаях процесс в идеале должен протекать при неизменной частоте вращения первичного двигателя 3 за счет изменения частоты вращения двигателя электрического 7 и тем самым работа тягового средства должна протекать при квазистационарном режиме работы первичного двигателя 3, что является одним из основных достоинств двухпо- точной передачи.
В статическом режиме частота тока статора двигателя 7, определяемая величиной сигнала на входе блока управления 21, задается суммированием в блоке 23 сигнала частоты блока 24, пропорционального сумме (с учетом знака) сигнала датчика 13 частоты вращения двигателя 7 и частоты скольжения на выходе формирователя 28, сигнала частоты вращения генератора с датчика 12 и сигнала сравнения задатчика 17.
Напряжение генератора 6 и двигателя 7 определяется сравнением в блоке 16 сигнала задатчика 17с сигналом блока 18, формирующего заданную зависимость между напряжением U и магнитным потоком Ф в соответствии с выбранной функцией, например
(и,кФ)
Режим работы двигателей 3 и 7 при этом согласован и алгебраическое суммирование их скоростей в механизме 1 осуществляется при постоянной и неизменной величине частоты вращения двигателя 3 и переменной двигателя 7,
В переходных динамических режимах колебания скорости движителей 5 вследствие колебания тяговой нагрузки передаются с выходного звена 4 механизма 1 на оба входных звена 2 и 8. Вследствие этого начинают меняться, частоты вращения обоих
двигателей 3 и 7, фиксируемые датчиками частоты вращения 12, 13 и тока 27, причем последним в большей степени вследствие высокой жесткости электромеханической характеристики асинхронного двигателя 7,
0 Сигналы, пропорциональные производным сигналов датчиков 12 и 27, поступают на вход блока 23, где суммируются со статиче- скимми сигналами и вызывают интенсивное изменение частоты тока на выходе преобра5 зователя 11 и, следовательно, частоты вращения двигателя 7 в направлении их (сигналов) уменьшения.
При колебаниях нагрузки вокруг некоего равновесного значения в передаче проис0 ходят колебания частоты вращения электрического двигателя вокруг соответствующего этому значению нагрузки значения частоты вращения. При отклонении нагрузки частота вращения двигателя изменяется
5 вследствие действия статических каналов регулирования, причем ошибки регулирования, вызывающие недостаточное изменение частоты вращения двигателя 7, вызвавшие изменение частоты вращения
0 двигателя 3, компенсируются дополнительным статическим регулированием частоты вращения двигателя 7 по частоте вращения двигателя 3 в результате сравнения сигнала датчика 12с сигналом задатчика 17 и отра5 ботки их рассогласования.
Каналы статического регулирования электрической ветви двухпоточной передачи могут быть выполнены иначе, чем на фиг. 1. Так, канал регулирования частоты может
0 быть построен без обратной связи по частоте вращения двигателя, а с обратной связью по току и напряжению. Соединение функциональных блоков 18 и 24 с датчиками 19, 20 и 27 может быть противоположным по срав5 нению, например, со схемой на чертеже: блок 18 может быть связан с датчиками 19 и 27, а блок 24 - с датчиками 19 и 20. Изменяется и построение блока 24,
Выбранные для блока 18 и формирова0 теля 28 функции определяют только статические характеристики системы и их выбор на демпфирующих свойствах электрического канала передачи мощности практически не сказывается, поэтому выбор их в доста5 точной степени произволен.
В результате использования предложенной системы реакция электрического двигателя 7 на внешние возмущения усиливается и совокупная реакция системы на возмущения смещается в область действия
электрической передачи, которая приобретает свойства параллельного шунтирующего фильтра возмущений по скорости по отношению к механическому каналу двухпо- точной передачи.
Подобным образом система реагирует на изменения сигнала управления, т. е. на воздействие со стороны водителя. На него одновременно реагируют система подачи топлива двигателя 3 и система управления частотой двигателя 7, но последняя - безынерционная и с той же коррекцией, как при отработке возмущений, в результате чего скорость тягового средства меняется за счет изменения частоты вращения электрического двигателя, при том, что тепловой, может либо вовсе не изменить свою скорость, либо изменить ее в пределах нескольких процентов в соответствии с линией наибольшей экономичности.
Подобная описанной динамическая и статическая коррекция может быть введена не только в электрической передаче переменного тока, но и в передаче постоянного тока с двигателем независимого или смешанного возбуждения и передача смешанного типа. Функционирование любой из них будет подобно функционированию описанной передачи. Характер функционирования передачи также не меняется, когда в зоне малых скоростей электрические машины меняются ролями - электрический двигатель 7 начинает работать генератором, передающим энергию генератору 6, начинающему работать двигателем.
Формула изобрете.ния
Электромеханическая двухпоточная передача тягового средства, содержащая планетарный дифференциальный механизм, первое входное звено которого с вяза но с первичным двигателем и генератором, второе - с электродвигателем, а выходное - с движителями, и систему автоматического регулирования электрической передачи, отличающаяся тем, что, с целью повышения надежности и экономичности работы тягового средства, путем повышения стабильности работы первичного двигателя при колебаниях тяговой нагрузки, система автоматического регулирования электрической передачи включает в себя блок управления регулятором возбуждения генератора, блок управления
регулятором частоты вращения электродвигателя, по крайней мере два блока суммирования, датчики тока, напряжения, магнитного потока, частота вращения электродвигателя и частоты вращения генератора, первый и второй функциональные блоки обработки сигналов соответственно по напряжению и магнитному потоку, а также по частоте вращения электродвигателя, задат- чик, первый и второй блоки дифференцирования, вход одного из которых подключен к датчику тока, другого - к датчику частоты вращения генератора, а выходы обоих подключены к блоку суммирования, к которому также подключены своими выходами
задатчик, датчик частоты вращения генератора и первый функциональный блок, который связан с блоком управления регулятором частоты вращения электродвигателя, а к блоку управления регулятором
возбуждения генератора подключен другой блок суммирования, с которым связаны задатчик и второй функциональный блок.

Изобретение относится к машиностроению, преимущественно сельскохозяйственному и транспортному, в частности, к тракторам и другим самоходным машинам. Цель изобретения - повышение надежности и экономичности тягового средства путем повышения стабильности работы первичного двигателя при колебаниях тяговой нагрузки. Двухпоточная электромеханическая передача содержит дифференциальный механизм 1, с первым входным звеном 2 которого связан тепловой двигатель 3, а с выходным звеном 4 - движители 5 л электрическую передачу, включающую генератор 6 и электродвигатель 7. Система автоматического регулирования электрической передачи содержит датчики тока и частоты вращения теплового и электрического двигателей и блоки дифференцирования, связанные с датчиками тока и частоты вращения электрического двигателя и с блоком суммирования на входе регулятора частоты вращения двтателя, с которым также связан датчик частоты вращения теплового двигателя. 1 ил.
| Двухпоточная электромеханическая передача тягового средства | 1988 |
|
SU1593994A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
