Изобретение относится к транспорту, в частности к устройствам автоматического индивидуального регулирования нагрузок тяговых двигателей независимого возбуждения, и является усовершенствованием устройства по авт.св. № 1079493.
Цель изобретения - повышение надежности.
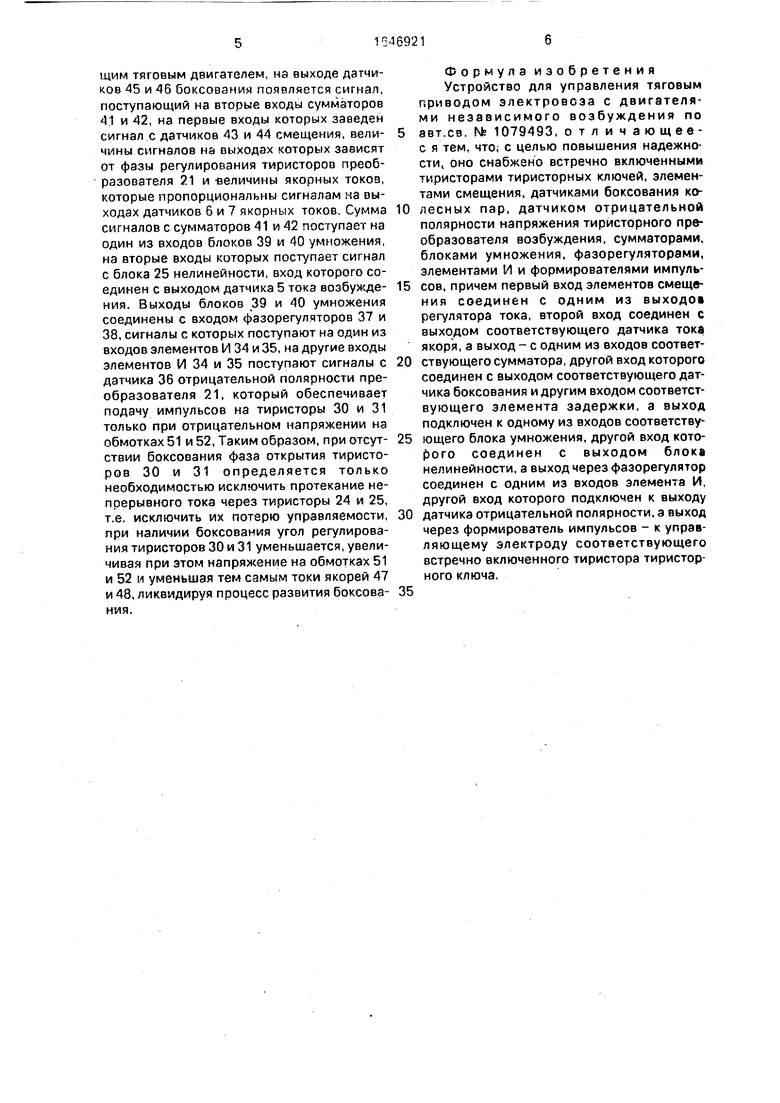
На фиг. 1 представлена функциональная схема устройства; на фиг.2 - временные диаграммы токов и напряжений.
Устройство содержит регулятор 1 якорных токов и тока возбуждения, к входам которого подключены задатчики скорости 2 и силы тяги 3, датчик 4 скорости и датчик 5 тока возбуждения. Датчики 6 и 7 токов якорей подключены к входам блока 8 выделения максимального тока и одним из входов элемента 9 и 10 сравнения. Выход блока 8
подключен к другим входам элементов 9 и 10 сравнения и одному из входов регулятора 1. Выходы элементов 9 и 10 сравнения через элементы 11 и 12 задержки подключены к блокам 13 и 14 умножения, другие входы . которых соединены с выходом блока 15 нелинейности, соединенного с датчиком 5 тока возбуждения. Выходы блоков 13 и 14 умножения подключены к фазорегуляторам 16 и 17, выходы которых соединены с входами элементов И 18 и 19, другие входы которых подключены к датчику 20 положительной полярности напряжения ти- ристорного преобразователя 21 тока возбуждения. Выходы элементов И 18 и 19 включены на входы формирователей 22 и 23 импульсов, выходы которых соединены с управляющими электродами тиристоров 24 и 25 тиристорных ключей 26 и 27, состоящих
О
сь ю ю
к
из резисторов 28 и 29 и пар встречно включенных тиристоров 30, 24 и 31, 25. Управляющие входы тиристоров 30 и 31 подключены к выходам формирователей 32 и 33 импульсов, входы которых соединены с выходами элементов И 34 и 35, первые входы которых подключены к датчику 36 отрицательной полярности напряжения возбуждения, а вторые - к выходам фазорегуляторов 37 и 38. Сигналы на фазорегуляторы 37 и 38 приходят с выходов блоков 39 и 40 умножения, первые входы которых соединены с блоком 15 нелинейности, а вторые - с выходами сумматоров 41 и 42. На сумматоры 41 и 42 приходят по два сигнала - с датчиков 43 и 44 смещения и с датчиков 45 и 46 боксова- ния. Датчики 43 и 44 смещения одним входом соединены с выходом регулятора 1 токов, другим - с датчиками 6 и 7 токов якорей 47 и 48. Силовой трансформатор 49 питает тиристорные преобразователи 21 и 50, которые, в свою очередь, питают обмотки 51 и 52 независимого возбуждения и обмотки якорей 47 и 48 соответственно.
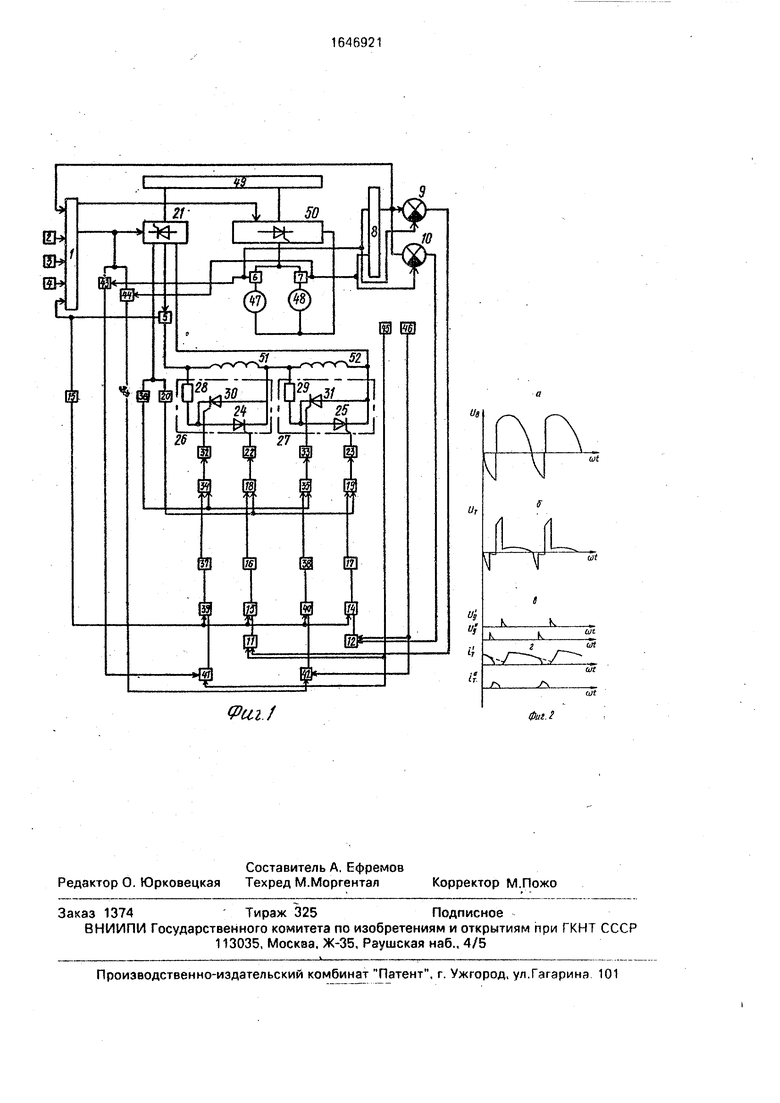
На фиг.2 показаны: а - напряжение на выходе управляемого преобразователя 21, б - напряжение тиристорных ключей 26 и 27, в - напряжение управления на входе тиристоров 24, 25 и 30, 31 соответственно
при углах а т регулирования тиристоров 24
и 25, «т регулирования тиристоров 30 и 31 тиристорных ключей 26 и 27 и а в регулирования тиристоров преобразователя 21, г - токи тиристоров 24, 25 и 30, 31 соответственно (пунктиром показан режим, который исключается).
Устройство работает следующим образом.
Управляемый преобразователь 21, питающий последовательно соединенные об мотки 51 независимого возбуждения и преобразователь 50, питающий якоря тяго- , вых двигателей 47 и 48, получают питание от силового трансформатора 49, Фаза открытия тиристоров преобразователей изме- няется регулятором 1 тока якорей и возбуждения, на входах которого сравниваются значения задатчиков скорости 2 и силы тяги 3 и датчиков якорных токов 6 и 7 и скорости 4. Разность между заданными и истинными значениями величин определяет углы регулирования преобразователей 21 и 50.
Блок 8 выделяет максимальный из якорных токов по сигналам, поступающим с датчиков 6 и 7 токов. Этот сигнал поступает на один из входов регулятора 1 и используется при регулировании фазы работы преобразователей 21 и 50 на суммирующие входы элементов 9 и 10 сравнения, на вычитающие входы которых подключены выходы датчиков 6 м 7 якорных токов. Сигналы, выделяемые элементами 9 и 10 сравнения
пропорциональны величине рассогласования нагрузоктягооых двигателей и являются сигналами для системы распределения нагрузок, Сигналы с элементов 9 и 10 поступают на элементы 11 и 12 задержки,
0 запрещающие регулирование на время работы защиты от боксованил. Управляющие сигналы на фазорегуляторы 16 и поступают с блоков умножения, на первый вход которых включены элементы 11 и 12 задер5 жки, а на второй - выход блока 15 нелинейности, вход которого соединен с выходом датчика 5 тока возбуждения. Блоки 13 и 14 умножения и блок 15 нелинейности обеспечивает коэффициент усиления системы.
0 близкий к линейному, что делает работу ее устойчивой. Управляющие импульсы на тиристоры 24 и 25, работающие при положительном напряжении преобразователя 21, поступает от формирователей 22 и 23 только
5 при положительной части выпрямленного напряжения, что обеспечивается элементами И 18 и 19 и датчиком 20 положительной полярности, вход которого соединен с выходом преобразователя 21. Угол открытия ти0 ристоров 24 и 25 зависит от величины рассогласования нагрузок двигателей и регулируется автоматически, при этом изменяется ток в обмотках 51 и 52 возбуждения, а значит, и в обмотках якорей, тем самым
5 менее нагруженный двигатель догружается до более нагруженного. Тиристоры 30 и 31, работающие под контролем датчика 36 только при отрицательном напряжении преоб- разователя 21, необходимы для
0 обеспечения устойчивости работы системы распределения нагрузок при малых углах регулирования тиристоров 24 и 25 и повышения эффективности защиты от боксова- ния,
5 Управление тиристорами 30 и 31.осуществляется следующим образом. Для ликвидации области потери управляемости тиристорами 24 и 25 при малых углах регулирования, когда наступает процесс проте0 кания через них непрерывного тока, на тиристоры 30 и 31 поступает управляющий ммпульс (фиг.2), фаза которого зависит от величины тока нагрузки, а отсчет ее ведется от угла регулирования тиристоров преобра5 зователя 21, Под действием управляющего импульса тиристоры открываются, закрывая тиристоры 24 и 25, не допуская начала процесса непрерывного тока через них.
При наступлении боксования одной из колесных пар, связанной с соответствующим тяговым двигателем, на выходе датчиков 45 и 46 боксования появляется сигнал, поступающий на вторые входы сумматоров 41 и 42, на первые входы которых заведен сигнал с датчиков 43 и 44 смещения, величины сигналов на выходах которых зависят от фазы регулирования тиристоров преобразователя 21 и -величины якорных токов, которые пропорциональны сигналам на выходах датчиков б и 7 якорных токов. Сумма сигналов с сумматоров 41 и 42 поступает на один из входов блоков 39 и 40 умножения, на вторые входы которых поступает сигнал с блока 25 нелинейности, вход которого соединен с выходом датчика 5 тока возбуждения. Выходы блоков 39 и 40 умножения соединены с входом фазорегуляторов 37 и 38, сигналы с которых поступают на один из входов элементов И 34 и 35, на другие входы элементов И 34 и 35 поступают сигналы с датчика 36 отрицательной полярности преобразователя 21, который обеспечивает подачу импульсов на тиристоры 30 и 31 только при отрицательном напряжении на обмотках 51 и 52, Таким образом, при отсутствии боксования фаза открытия тиристоров 30 и 31 определяется только необходимостью исключить протекание непрерывного тока через тиристоры 24 и 25, т.е. исключить их потерю управляемости, при наличии боксования угол регулирования тиристоров 30 и 31 уменьшается, увеличивая при этом напряжение на обмотках 51 и 52 и уменьшая тем самым токи якорей 47 и 48, ликвидируя процесс развития боксования.
Формула изобретения Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения по
авт.св. № 1079493, о т л и ч ающее- с я тем, что; с целью повышения надежности, оно снабжено встречно включенными тиристорами тиристорных ключей, элементами смещения, датчиками боксования колесных пар, датчиком отрицательной полярности напряжения тиристорного преобразователя возбуждения, сумматорами, блоками умножения, фазорегуляторами, элементами И и формирователями импульсов, причем первый вход элементов смещения соединен с одним из выходов регулятора тока, второй вход соединен с выходом соответствующего датчика тока якоря, а выход - с одним из входов соответствующего сумматора, другой вход которого соединен с выходом соответствующего датчика боксования и другим входом соответствующего элемента задержки, а выход подключен к одному из входов соответствующего блока умножения, другой вход которого соединен с выходом блока нелинейности, а выход через фазорегулятор соединен с одним из входов элемента И, другой вход которого подключен к выходу
датчика отрицательной полярности, а выход через формирователь импульсов - к управляющему электроду соответствующего встречно включенного тиристора тиристорного ключа.
Ua
UT
rMГТ
bit
/SJ
cut wi
Oft
ui

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1595707A2 |
| Устройство для выравнивания нагрузок тяговых электродвигателей подвижного состава | 1985 |
|
SU1232521A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2208530C2 |
| Двухдвигательный электропривод постоянного тока | 1983 |
|
SU1150724A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1986 |
|
SU1403335A2 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
Изобретение относится к транспорту и может быть использовано для управления тяговым приводом электровоза с независимым возбуждением. Целью изобретения является повышение надежности. Устройство содержит встречно включенные тиристоры тиристорных ключей, элементы смещения, датчики боксования колесных пар, датчик отрицательной полярности напряжения ти- ристорного преобразователя возбуждения, сумматоры, блоки умножения, фазорегуляторы, элементы И и формирователи импульсов. В данном устройстве при отсутствии боксования фаза открытия встречно включенных тиристоров исключает потерю управляемости тиристорных ключей, а при боксовании обеспечивает уменьшение токов якорей, т.е. ликвидацию процесса развития боксования. 2 ил.
(Риг/
Фиг 2
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
