Изобретение относится к оптико-электронным методам измерения координат объектов с помощью твердотельных матричных преобразователей.
Цель изобретения - повышение точности измерения координат в условиях низкого отношения сигнал/шум.
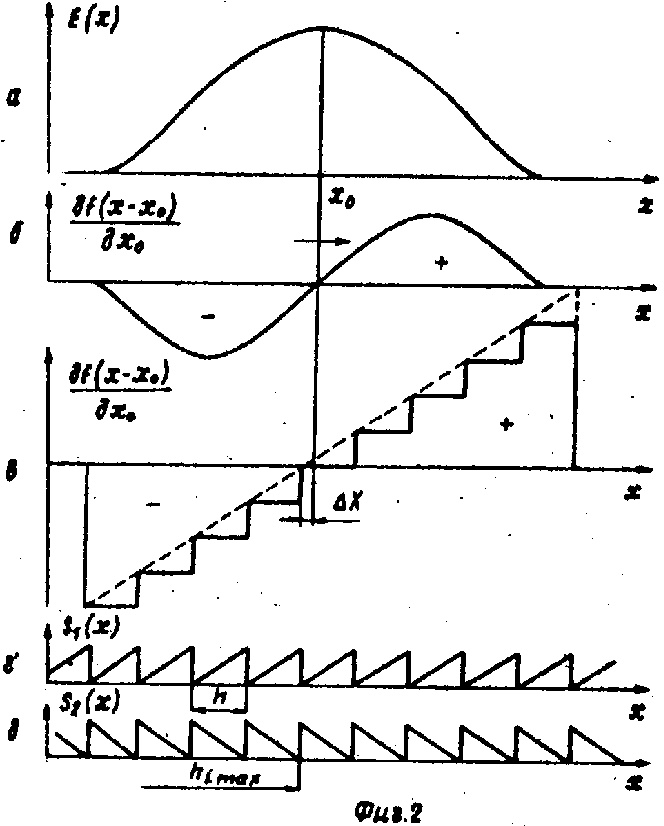
На фиг. 1, а показана функция фоточувствительности S(x), Δh - размер элемента; h - межэлементный шаг вдоль измеряемой координаты; на фиг. 1, б показано распределение освещенности Е(х) изображения, "расфокусированного" на величину четырехкратного межэлементного шага, где хо - координата изображения; на фиг. 1, в представлены сигналы Uik, Uik+1, Uik+2, Uik+3 многоэлементного приемника для изображения на фиг. 1, б, где х1 - первая составляющая координаты; х2 - вторая составляющая координаты, х3 - третья составляющая координаты; на фиг. 1, г показано распределение освещенности Е(х) изображения, "расфокусированного" на величину шестикратного межэлементного шага; на фиг. 1, д представлены сигналы многоэлементного приемника Uik, Uik+1, . . . , Uik+5 для изображения на фиг. 1, г, где δхо - ошибка в определении координаты за счет изменения размеров изображения.
Заштрихованные участки обозначают неиспользуемую энергию фрагментов изображения и сигналов приемника для определения координаты.
На фиг. 2, а показано распределение освещенности Е(х) сигнала изображения; на фиг. 2, б изображена весовая функция  оптимального измерителя координаты изображения; на фиг. 2, в изображены весовые функции
оптимального измерителя координаты изображения; на фиг. 2, в изображены весовые функции  ) предлагаемых вариантов: сплошной ступенчатой линией - первый, штриховой - второй варианты; Δх - вторая составляющая координаты; на фиг. 2, г показана функция фоточувствительности S1(x) с линейно возрастающими участками, отражающая изменение фоточувствительности для первых апертур элементов; h - межэлементный шаг; на фиг. 2, д показана функция фоточувствительности S1(x) с линейно убывающими участками, отражающая изменение фоточувствительности для вторых апертур элементов, Δх - первая составляющая координаты.
) предлагаемых вариантов: сплошной ступенчатой линией - первый, штриховой - второй варианты; Δх - вторая составляющая координаты; на фиг. 2, г показана функция фоточувствительности S1(x) с линейно возрастающими участками, отражающая изменение фоточувствительности для первых апертур элементов; h - межэлементный шаг; на фиг. 2, д показана функция фоточувствительности S1(x) с линейно убывающими участками, отражающая изменение фоточувствительности для вторых апертур элементов, Δх - первая составляющая координаты.
Способ поясняется путем приближенного решения уравнения максимального правдоподобия
I( ) =
) =  E(x)
E(x)  dx = 0 , (1) где I(
dx = 0 , (1) где I( ) - значение интеграла свертки;
) - значение интеграла свертки;
( ) - оценка измеряемого параметра;
) - оценка измеряемого параметра;
f(x- ) - функция формы принимаемого сигнала;
) - функция формы принимаемого сигнала;
Е(х) - распределение освещенности изображения;
xmax - величина измеряемого интервала координаты.
На фиг. 2, а и б показан процесс получения оптимальной оценки ( ), т. е. решения уравнения (1). Он сводится к вычислению свертки сигнала f(x - xo) известной формы по измеряемому параметру хо для различных значений хо. Ввиду нелинейной зависимости параметра хо от принимаемой реализации нельзя в явном виде получить решение уравнения (1). Для многоэлементных фотоприемников, имеющих жесткую геометрическую привязку элементов, наиболее рациональным способом решения уравнения (1) является использование дискриминаторных методов получения оценок. При этом в качестве опорных координат дискриминатора целесообразно выбирать наиболее "удобные" точки, связанные с решеткой элементов приемника. Вторым приближением, использованным для решения уравнения (1), является параболическое представление формы сигнала засветки, т. е.
), т. е. решения уравнения (1). Он сводится к вычислению свертки сигнала f(x - xo) известной формы по измеряемому параметру хо для различных значений хо. Ввиду нелинейной зависимости параметра хо от принимаемой реализации нельзя в явном виде получить решение уравнения (1). Для многоэлементных фотоприемников, имеющих жесткую геометрическую привязку элементов, наиболее рациональным способом решения уравнения (1) является использование дискриминаторных методов получения оценок. При этом в качестве опорных координат дискриминатора целесообразно выбирать наиболее "удобные" точки, связанные с решеткой элементов приемника. Вторым приближением, использованным для решения уравнения (1), является параболическое представление формы сигнала засветки, т. е.
f(x-xo)≈1 -  , (2) где Gx - параметр формы засветки.
, (2) где Gx - параметр формы засветки.
Такое приближение представляется оправданным ввиду вариации размеров изображения, а также в связи с отсутствием какой-либо точной аппроксимации сигнала изображения. При этом принимается во внимание только тот факт, что засветка симметрична относительно своего максимума (т. е. может быть гауссовый, косинусоидальный, вида  , . . . ).
, . . . ).
С учетом сделанных приближений, разлагаем уравнение (1) в ряд Тейлора относительно грубой оценки хгр и, оставляя в разложении члены до первого порядка включительно, получаем оценку координаты = xгр+
= xгр+  , (3) где хн, хк - точки, определяющие интервал, занимаемый изображением.
, (3) где хн, хк - точки, определяющие интервал, занимаемый изображением.
Выбирает в качестве грубой оценки (опорной точки дискриминатора) координату элемента с максимальной амплитудой himax
хгр = himax, (4) заменяя интегрирование в пределах от хн до хк суммой интегралов по отдельным последовательным участкам величиной h занятых изображением получаем уравнение (3) в виде  = h
= h +
+  (5) Пpеобpазовываем дpобь выажения (5), являющуюся дискpиминационной составляющей оценки
(5) Пpеобpазовываем дpобь выажения (5), являющуюся дискpиминационной составляющей оценки =
=  (6)
(6)
Полученное выражение (6) является исходным для формулировки способа определения координаты изображения.
Действительно, интеграл в первой сумме с весовой функцией (x - hi) можно реализовать функцией фоточувствительности S1(х) (фиг. 2, г) с линейно нарастающими участками, либо выражением (x)(x-hi)dx =
(x)(x-hi)dx = 
 (x)(x-hi)
(x)(x-hi) (x)dx+→
(x)dx+→
+  h
h  (x)dx =
(x)dx =  U1i-U
U1i-U +
+  h
h U1i+U
U1i+U , (7) где U1i =
, (7) где U1i =  (x)(x-hi)dx; (8)
(x)(x-hi)dx; (8)
U2i =  (x)[h-(x-hi)] dx (9) являются сигналами i-го элемента соответственно первой и второй апертур (на фиг. 2, г и д показаны функции фоточувствительности S1(x) и S2(х), участки монотонного изменения которых соответствуют весовым функциям (x - hi) и h - (x - hi), суммарный сигнал обеих апертур равен U1i+ U2i =
(x)[h-(x-hi)] dx (9) являются сигналами i-го элемента соответственно первой и второй апертур (на фиг. 2, г и д показаны функции фоточувствительности S1(x) и S2(х), участки монотонного изменения которых соответствуют весовым функциям (x - hi) и h - (x - hi), суммарный сигнал обеих апертур равен U1i+ U2i =  (x)dx (10) С учетом выражений (7), (8), (9), (10), переписываем выражение (6) в виде x =
(x)dx (10) С учетом выражений (7), (8), (9), (10), переписываем выражение (6) в виде x =  +
+  . (11)
. (11)
На фиг. 2 , в показана штриховой линией весовая функция дискриминатора, определяемого выражением (11), причем "ноль" весовой функции соответствует координате himax.
Выражение (11) является искомой формулой для второй составляющей координаты, если считать, что крутизна считывающих апертур равна единице и функции фоточувствительности считывающих апертур имеют непрерывный характер.
Первое положение реализуется для фоточувствительных элементов квадратной формы, т. е. для соотношения размеров элементов и диагональном разделении их на независимые фоточувствительные области.
Второе положение обуславливает равенства размера элемента и межэлементного шага, т. е. Δh = h, Δр = р, что невыполнимо на практике.
Необходимость технологического межэлементного зазора накладывает условия Δh > h, Δp < p.
Для решетки элементов с размером элемента вдоль измеряемой координаты меньше шага решетки Δh < h и поперечным размером Δp≠ Δh можно записать соотношения, аналогичные выражениям (8) и (9)
U1i= 
 E(x)(x-h
E(x)(x-h  dx; (12)
dx; (12)
U2i=  E(x)
E(x) P-
P-  (x-hi)dx, (13) где
(x-hi)dx, (13) где  =K - крутизна функции фоточувствительности.
=K - крутизна функции фоточувствительности.
Необходимо отметить, что весовые функции (x-h) иΔP
(x-h) иΔP
 (x-h)
(x-h) имеют дискретно-непрерывный характер, т. е. соответствующие им функции фоточувствительности имеют участки с нулевой чувствительностью и соответствующим образом дискретизуют входное непрерывное распределение освещенности Е(х). Однако в данном случае дискретизация, хотя и вносит дополнительную погрешность, но она минимальна вследствие минимальности требуемых зазоров. На основе выражений (12) и (13) заменим соотношение (11) для "идеальной" реализации функций фоточувствительности соотношением для реальных дискретизованных функций фоточувствительности Δx =
имеют дискретно-непрерывный характер, т. е. соответствующие им функции фоточувствительности имеют участки с нулевой чувствительностью и соответствующим образом дискретизуют входное непрерывное распределение освещенности Е(х). Однако в данном случае дискретизация, хотя и вносит дополнительную погрешность, но она минимальна вследствие минимальности требуемых зазоров. На основе выражений (12) и (13) заменим соотношение (11) для "идеальной" реализации функций фоточувствительности соотношением для реальных дискретизованных функций фоточувствительности Δx =  +
+  (14)
(14)
Если пренебречь значением, вырабатываемым первой суммой числителя выражения (14), т. е. положить
δΔx=  ≈ 0 , (15) где δΔx - величина ошибки в определении Δх, то приходим к выражению Δx =
≈ 0 , (15) где δΔx - величина ошибки в определении Δх, то приходим к выражению Δx =  +
+  , (16) по которому вычисляется вторая составляющая координаты. Весовая функция дискриминатора, определяемого выражением (16), показана на фиг. 2, в ступенчатой непрерывной линией.
, (16) по которому вычисляется вторая составляющая координаты. Весовая функция дискриминатора, определяемого выражением (16), показана на фиг. 2, в ступенчатой непрерывной линией.
Приближение (15) возможно при увеличении отношения размера изображения к межэлементному шагу. При этом линейно нарастающая функция веса аппроксимируется ее ступенчатым эквивалентом, а соответствующая приближению ошибка выражения (15) становится пренебрежимо малой величиной.
Определение элемента с максимальной амплитудой введением третьей составляющей координаты - константы, фиксирующей положение элемента с максимальной амплитудой относительно начала изображения, где высокая крутизна сигнала гарантировала достаточно четкую фиксацию начального элемента изображения при воздействии помех. Такой способ, приемлемый при постоянных размерах изображения, вносит большие ошибки при вариациях размера изображения (величина δхо на фиг. 1, д). Эти ошибки иллюстрируются на фиг. 1:
- на фиг. 1, в - правильное определение элемента с максимальной амплитудой (Uik+2), сигналу этого элемента присвоено нулевое значение коэффициента во взвешенной дискриминационной сумме выражения (1);
- на фиг. 2, д - неправильное определение элемента с максимальной амплитудой, для данного распределения максимальный сигнал имеет iK+3 - элемент, а не iК+2 - элемент.
Возможно непосредственное определение элемента с максимальной амплитудой путем операций сравнения. Однако ввиду малой крутизны изображения в области максимума сигнала при воздействии помех этот способ может давать аномально большие ошибки в определении координаты, связанные с изменением опорной точки дискриминатора в смежных циклах измерений.
В способе фиксация номера элемента с максимальной амплитудой включает следующие операции: предварительную фильтрацию скользящим суммированием последовательности сигналов элементов, причем число элементов в сумме выбирают нечетным (2К + 1), соответствующим минимальному размеру изображения, определение максимума в последовательности сумм (определение номера конечного элемента максимальной суммы), определение номера элемента с максимальной амплитудой в исходной последовательности вычитанием из номера конечного элемента максимальной суммы числа К, равного половине числа суммируемых элементов без единицы.
Целесообразность введенных операций понятна при их сравнении с оптимальной корреляционной обработкой сигнала.
Так, операция "скользящего" суммирования с числом элементов в сумме, соответствующем размеру изображения, является приближенным аналогом свертки принимаемого сигнала с опорным сигналом, так как форма опорного сигнала в данном случае соответствует его прямоугольному приближению, а дискретность вычисления свертки определяется межэлементным шагом.
Известное свойство выходного сигнала корреляционного приемника о сдвиге максимума выходного сигнала по отношению к входному использовано здесь для определения элемента с максимальной амплитудой сигнала во входной последовательности по известным характеристикам опорного сигнала (числу элементов в сумме). (56) Хромов Л. И. и др. Твердотельное телевидение. М. : Радио и связь, 1986, с. 55-56.
Саламон Ф. М. Применение приборов с зарядовой связью в высокоточных устройствах слежения и наведения. - Optical Engineeting, 1981, 20, N 1, р. 135-142.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТЫ ИЗОБРАЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА | 1986 |
|
SU1485834A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 1986 |
|
SU1412459A1 |
| СПОСОБ ВОСПРИЯТИЯ ЭЛЕМЕНТОВ ПОЛЯ ИЗОБРАЖЕНИЯ МИКРООБЪЕКТОВ | 2012 |
|
RU2479027C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛНОТЫ ДРЕВОСТОЕВ | 2005 |
|
RU2294622C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| Способ углового сверхразрешения в приемной цифровой антенной решётке | 2020 |
|
RU2746063C1 |
| Способ определения параметра частотно-контрастной характеристики фотографической системы | 1985 |
|
SU1337875A1 |
| Способ углового сверхразрешения в приемных цифровых антенных решетках | 2019 |
|
RU2713503C1 |
| Способ передачи и приема растровых изображений | 1985 |
|
SU1356256A1 |
| Способ контроля передаточной функции оптической системы и устройство для его осуществления | 1985 |
|
SU1318821A1 |
Изобретение относится к оптикоэлектронным методам измерения координат объектов с помощью твердотельных матричных преобразователей. Цель изобретения - повышение точности измерения координат в условиях низкого отношения сигнал/шум. Для этого в известном способе, включающем многоэлементное фотоэлектрическое преобразование изображения, формирование видеосигнала, определение составляющей координаты изображения источника по координате фоточувствительного элемента, максимальную амплитуду сигнала получают путем скользящего суммирования исходной последовательности элементов видеосигнала, а вторую составляющую координаты изображения источника определяют по формуле  где h - величина межэлементного шага; Δh - размер элемента; Ui - величина сигнала с i-го элемента в исходной последовательности; imax - номер элемента с максимальной амплитудой сигнала. 2 ил.
где h - величина межэлементного шага; Δh - размер элемента; Ui - величина сигнала с i-го элемента в исходной последовательности; imax - номер элемента с максимальной амплитудой сигнала. 2 ил.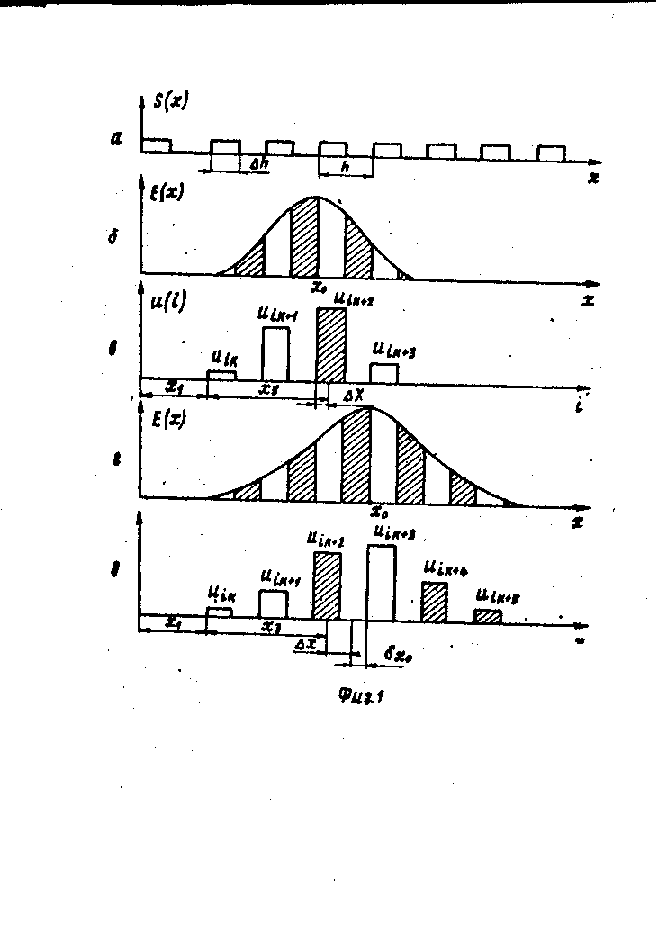
СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА, включающий многоэлементное фотоэлектрическое преобразование изображения на фоточувствительных элементах, формирование видеосигнала, определение координаты изображения путем суммирования двух составляющих видеосигнала, определения первой составляющей координаты по координате фоточувствительного элемента с максимальной амплитудой сигнала, отличающийся тем, что, с целью повышения точности измерений координат изображения в условиях низкого отношения сигнал/шум, для определения элемента с максимальной амплитудой сигнала осуществляют скользящее суммирование исходной последовательности элементов видеосигнала, причем число элементов в сумме выбирают нечетным (2К + 1), соответствующим размеру изображения, определяют максимум в последовательности результатов суммирования, номер элемента с максимальной амплитудой сигнала в исходной последовательности получают вычитанием из номера максимальной суммы числа К, равного половине числа суммируемых элементов без единицы, вторую составляющую координаты получают по формуле
ΔX =  + 0.5 Δh ,
+ 0.5 Δh ,
где ΔX - вторая составляющая координаты;
h - величина межэлементного шага;
Δh - размер элемента;
Ui - величина сигнала с i-го элемента в исходной последовательности;
imax - номер элемента с максимальной амплитудой сигнала,
причем суммирование по i осуществляют для совокупности элементов, соответствующих размеру изображения.
