Предполагаемое изобретение относится к радиолокации, в частности к бортовым радиолокационным измерителям высоты и скорости летательного аппарата (ЛА) относительно земной поверхности.
Изобретение может быть использовано на разных ЛА, в том числе на вертолетах на участке пилотирования и проведения монтажных работ. Результаты измерений высоты и скорости могут быть так же использованы для коррекции уходов бортовой инерциальной навигационной системы (ИНС).
Для безопасной навигации ЛА широко используются траекторные измерения высоты и скорости полета ЛА. Задачу таких измерений обычно выполняет радиовысотомер и радиолокационный измеритель скорости. Имеются варианты построения радиовысотомеров и измерителей скорости, в том числе выполнения их функций как разными устройствами, так и одним устройством.
Известные доплеровские измерители составляющих скорости (ДИСС) излучают зодирующий сигнал и принимают отраженный через три или четыре коммутируемые не компланарные лучи антенной системы, по каждому лучу доплеровским способом измеряют радиальные скорости ЛА, на основании этих измерений с учетом известного направления лучей через решение системы уравнений определяются составляющие скорости ЛА в связанной системе координат.
Повышение точности измерения скорости ЛА в ДИСС может быть получено за счет повышения точности измерения радиальных скоростей. В [1] это достигается тем, что по лучу передающей антенны излучается пара импульсных последовательностей, имеющих одинаковые длительность, период следования и взаимно инверсные законы изменения частоты манипуляции во времени. Шаг перестройки частоты в каждой последовательности обратно пропорционален длительности зондирующего импульса τ. Отраженный сигнал принимается лучом приемной антенны в интервале между зондирующими импульсами, переносится на нулевую частоту с одновременным получением квадратурных составляющих сигнала, оцифровывают и записывают в массивы s1(m,n) и s2(m,n) в координатах дальность m - номер периода n, далее на основании гипотезы о значении радиальной скорости V для первого массива s1(m,n) вычисляют фазокомпенсирующую функцию exp(jΦ(n,V)), для второго массива s2(m,n) - exp(jΦ(N-n-1,V), которые компенсируют доплеровский сдвиг отраженных сигналов соответствующих массивов, преобразуют с помощью фазокомпенсирующих функций массивы s1(m,n) и s2(m,n) в массивы u1(m,n) и u2(m,n), находят спектры преобразованных сигналов F1(m,k) и F2(m,k), по которым находят модуль их взаимной корреляции C(V). Перебором гипотез о значении радиальной скорости V находят оценку скорости, соответствующую максимуму взаимной корреляции C(V).
Способ [1] позволяет уменьшить время наблюдения для оценки скорости ЛА с допустимой флюктуационной погрешностью за счет использования широкополосных зондирующих сигналов и взаимно корреляционной обработки дальностных реализаций отраженных сигналов с взаимно инверсными законами модуляции.
Применение способа [1] при измерении скорости ЛА аналогично, как и в других вариантах ДИСС, не решает вопроса снижения влияния структуры отражающей поверхности на точность измерения и устойчивость работы над спокойной морской поверхностью. Габаритные размеры антенной системы велики по сравнению с антенной системой радиовысотомера и соответствуют габаритным размерам антенны ДИСС.
Способ измерения скорости ЛА относительно земной поверхности [2] включает применение на борту ЛА радиолокационной станции (РЛС), выполняющей с интервалом τ сеансы пространственно временных измерений дальности до земной поверхности R(Qаз,Qум) под ЛА, где R - дальность до разрешаемого элемента поверхности, (Qаз - угол азимута, Qум - угол места - угловые координаты разрешаемого элемента поверхности в связанной системе координат; измеренные кадры R(Qаз,Qум) с учетом данных ИНС о угловом положении ЛА и высоте ЛА относительно эталонного уровня моря Hинс преобразуют в соответствующие кадры z(x,y) высот рельефа местности в земной системе координат. Согласно способу находят скорость ЛА V в следующей последовательности: 1) вычисляют по двум соседним кадрам усредненный 

Результаты последовательных оценок скорости ЛА V совместно с данными о скорости Vинс, измеренной ИНС, фильтруются фильтром Калмана с получением скорректированной оценки составляющих скорости ЛА.
Достоинством способа является возможность реализовать измерение составляющих вектора скорости при зондировании земной поверхности на близких к вертикали углах, что обеспечивает устойчивую работу радиолокационного измерения над морской поверхностью не зависимо от его состояния. Одиночная оценка составляющих скорости вычисляется по большому числу точек наблюдаемого кадра, соответственно это повышает ее точность и достоверность.
Недостатком способа и устройства является необходимость использования внешней информации ИНС о угловом положении носителя для получения оценок высоты разрешаемых элементов сцены в земной системе координат. Кроме того для измерения углового положения разрешаемых элементов сцены требуются относительно большие габариты антенной системы.
Известен способ измерения составляющих скорости ЛА [3], взятый в качестве прототипа, в котором используются данные радиолокационных изображений (РЛИ) подстилающей земной поверхности от когерентной РЛС моноимпульсного типа при переднебоковом обзоре. Согласно способу получают РЛИ подстилающей поверхности при разных (более двух) положениях лучей антенной системы, отличающихся по азимуту и углу места, в координатах дальность - доплеровская частота, пеленгуют яркие точки РЛИ по азимуту и углу места моноимпульсным методом, при полете над ровной горизонтальной или водной поверхностью угол места ярких точек определяется из данных измерений высоты ЛА, выполняемых радиовысотомером, и наклонной дальности, определяют невязку ΔF оценки доплеровского смещения сигнала с данными, определяемыми скоростью ЛА по данным ИНС, и измеренными угловыми положениями ярких точек. Ошибка измерения трех компонент вектора скорости ЛА в ИНС находится расчетом, учитывающим невязку оценки доплеровского смещения ΔF и матрицу координат K ярких точек размерностью K*3. За счет пеленгации ярких точек исключаются ошибки, присущие доплеровским измерителям скорости, обусловленные влиянием отражающих свойств подстилающей поверхности.
Достоинством способа является повышенная точность измерения за счет селекции множества ярких точек поверхности Земли в координатах дальность - доплеровская частота, оценки их угловых координат при разных положениях оси диаграммы направленности антенной системы и индивидуального учета из вклада в оценку составляющих скорости.
Недостатком способа является то, что для его реализации требуется сложная, перестраиваемая по углу моноимпульсная антенная система переднебокового визирования с относительно большими габаритами, для измерения высоты используется отдельная антенная система, приемопередатчик и устройство обработки.
Целью предполагаемого изобретения является однолучевое измерение высоты и составляющих скорости летательного аппарата на базе радиовысотомера при сниженных габаритах антенной системы.
Поставленная цель достигается за счет вертикального зондирования земной поверхности радиолокационным сигналом через широко направленную антенну, когерентного приема отраженного сигнала с получением двумерного радиолокационного изображения (РЛИ) местности в координатах дальность - доплеровская частота, первичной оценки высоты ЛА как минимальную, усредненную по нескольким измерениям дальность до точек РЛИ, превышающих порог обнаружения, нахождения кривой максимального контраста РЛИ в координатах дальность - доплеровская частота, уточнения методом итераций гипотезы измеряемых параметров за счет расчета кривой максимального контраста, соответствующего гипотезе, формирования сигнала ошибки кривой максимального контраста гипотезы относительно кривой максимального контраста РЛИ, преобразования сигнала ошибки кривой контраста в сигнал ошибки измеряемых параметров, сложения его с уточняемой гипотезой, повторение итераций и выдача в режиме слежения измеряемых параметров потребителю.
Предлагаемый способ измерения составляющих скорости ЛА заключается в следующем.
Через широко направленную антенну радиовысотомера проводят вертикальное зондирование земной поверхности,
Когерентно принимают отраженный сигнал и получают двумерное радиолокационное изображение (РЛИ) местности в координатах дальность - доплеровская частота, при этом разрешение РЛИ по доплеровской частоте δF должно соответствовать расчетному интервалу когерентного накопления T;

где LСТi - ширина i - того разрешаемого кольца дальности на облучаемой земной поверхности;
δR - разрешение сигнала по дальности;
i - номер разрешаемого кольца дальности, отсчитанный от элемента дальности nh, соответствующего высоте H, 
VП - путевая скорость ЛА.
Получают первичную оценку высоты летательного аппарата H как минимальную усредненную дальность до точек РЛИ, мощность отраженного сигнала от которых превышает порог обнаружения;
Селектируют РЛИ в окне дальностей, начальное положение которого соответствует предварительной оценке высоты ЛА HП, сниженной на удвоенную априорно известную величину ее погрешности Δ, а конец - положению максимально удаленного разрешаемого элемента РЛИ, мощность отраженного сигнала от которого превышает порог обнаружения;
Находят дисперсии шума 



где 
PПР(n, kF) - мощность сигнала, отраженного (k, KF) элементом РЛИ;
k - индекс дальности;
kF - индекс доплеровской частоты;
n - индекс гипотезы положения скачка мощности сигнала по дальности;
K - длина реализации отселектированного участка РЛИ по дальности, выраженная в числе разрешаемых элементов δR.
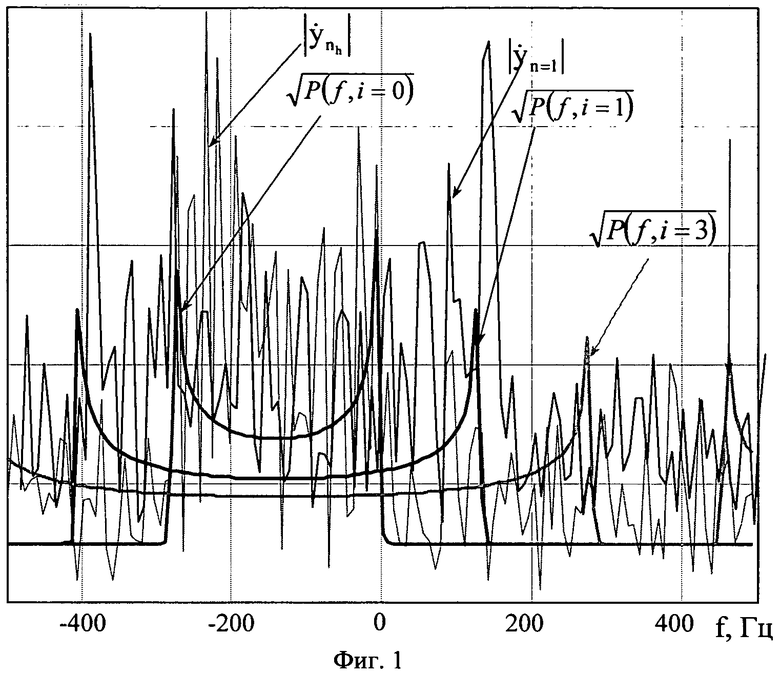
Вид реализаций спектров сигнала на дальностях i и соответствующие сглаженные кривые огибающих спектра приведены на фиг.1. Границам спектров на каждой дальности соответствуют скачки спектральной мощности сигнала.
Вычисляют весовую сумму - функционал соответствия - Ly(z/n,kF) принятой огибающей амплитуды отраженного сигнала z на частоте kF гипотезе (n,kF) положения скачка мощности на дальности n при доплеровской частоте kF:

Данное выражение получено в Приложении 1.
Находят положение скачка (nR,kF) по гипотезе, дающей максимум функционала соответствия Ly(z/n,kF).
По результатам определения скачка на всех сечениях kF кадра РЛИ получают кривую nR(kF) максимального контраста наблюдаемого РЛИ.
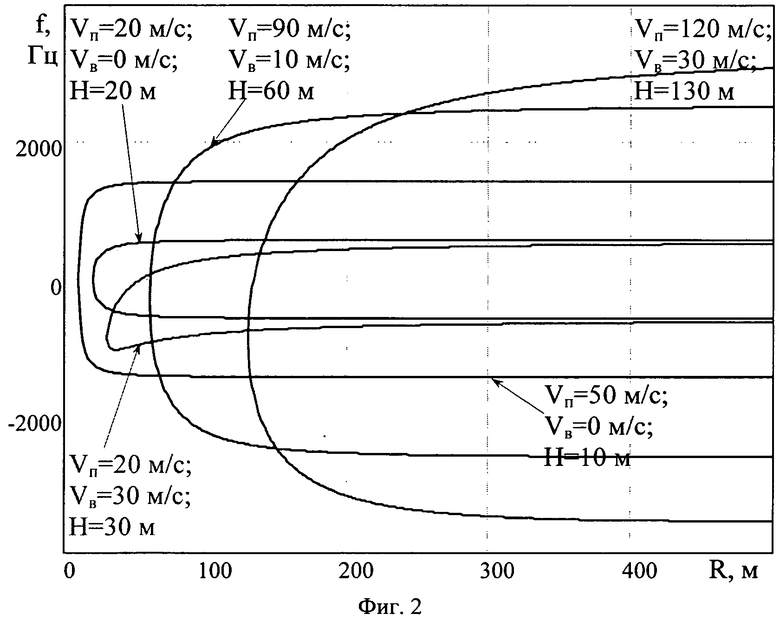
Рассчитывают кривую максимального контраста Ri(kF,Xi) для гипотезы Xi=(VПi,VВi,Hi):

где δF=1/T - разрешение РЛИ по доплеровской частоте;
λ - длина волны зондирующего сигнала.
Значения Ri берутся в диапазоне от первичной оценки высоты (H-2ΔR) до положения максимально удаленной точки кадра РЛИ, амплитуда которой превышает порог обнаружения, но не далее 
Для исходной гипотезы (i=0) в качестве значения высоты берется первичная оценка высоты ЛА H, в качестве значений путевой VП и вертикальной VВ составляющих скорости ЛА берутся соответствующие центральные значения априорно известных окон. Кривая максимального контраста, соответствующая i-той гипотезе, (5) получена аналитически на основании зависимости мощности отраженного сигнала от наклонной дальности Ri, высоты полета Hi, вертикальной VВi и путевой VПi составляющих скорости ЛА:
Находят матрицу якобиана Di(kF,Xi) преобразования вектора Ri(kF,Xi):

где 




Находят оптимальную оценку ошибки ΔXi вектора Xi относительно истинного значения:

где Di=Di(kF,Xi);


δR - разрешение зондирующего сигнала по дальности;
Находят уточненную оценку вектора измеряемых параметров

Повторяют итерации уточнения вектора измеряемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений, переходят в режим слежения, выдают потребителю оценки высоты, путевой и вертикальной составляющих скорости в режиме слежения.
Вид кривых максимального контраста для некоторых параметров движения ЛА приведен на фиг.2.
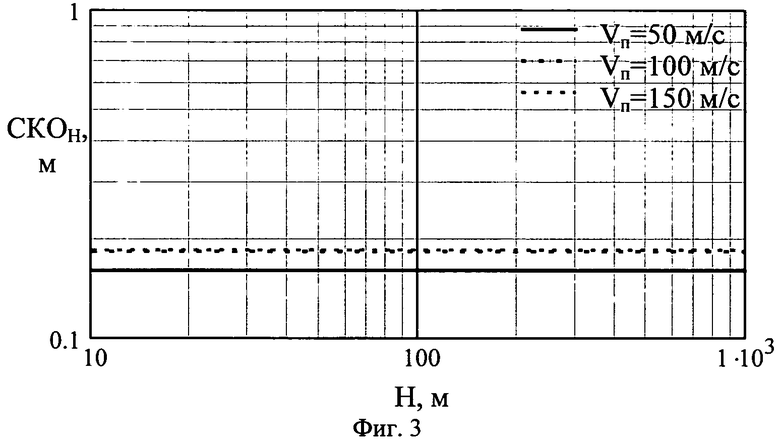
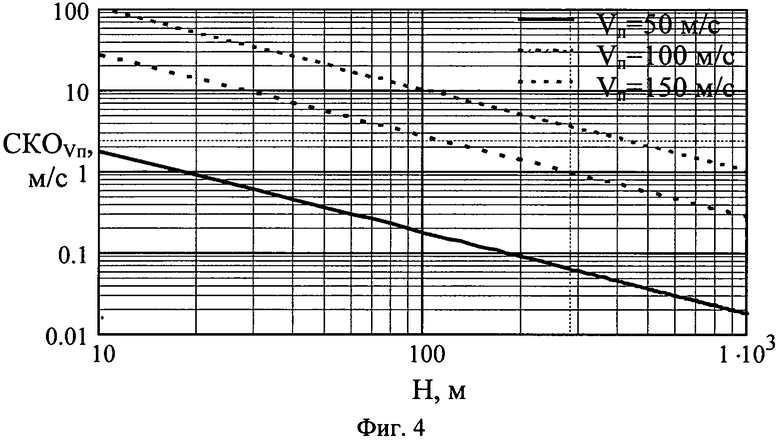
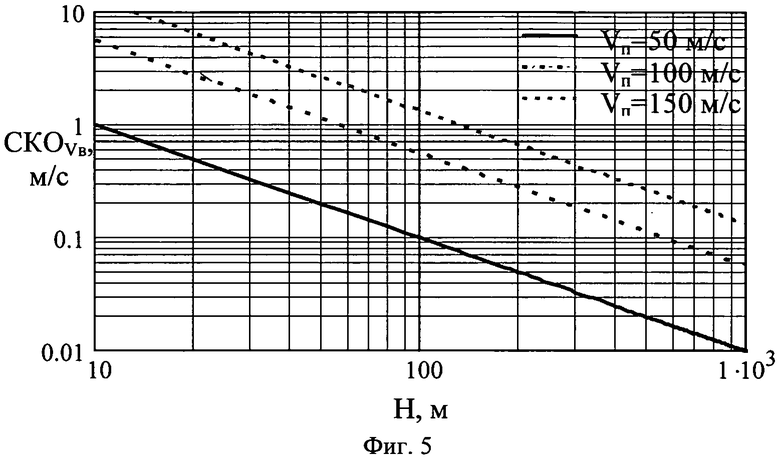
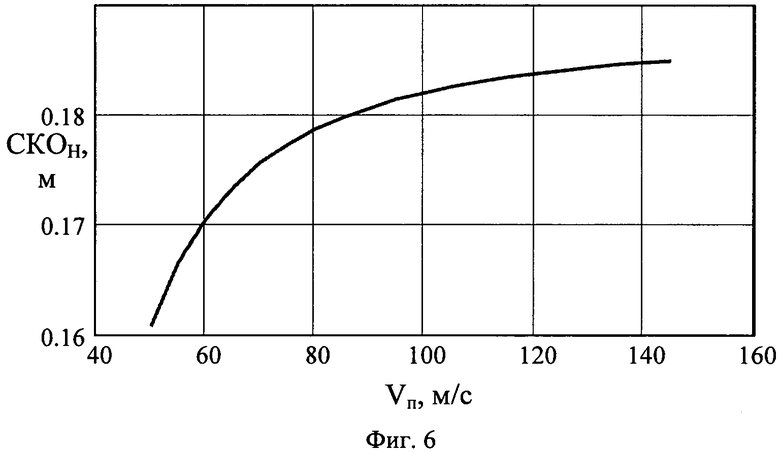
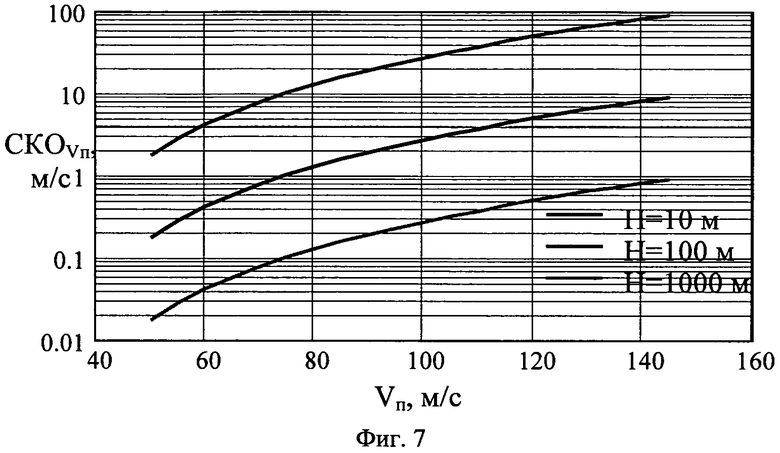
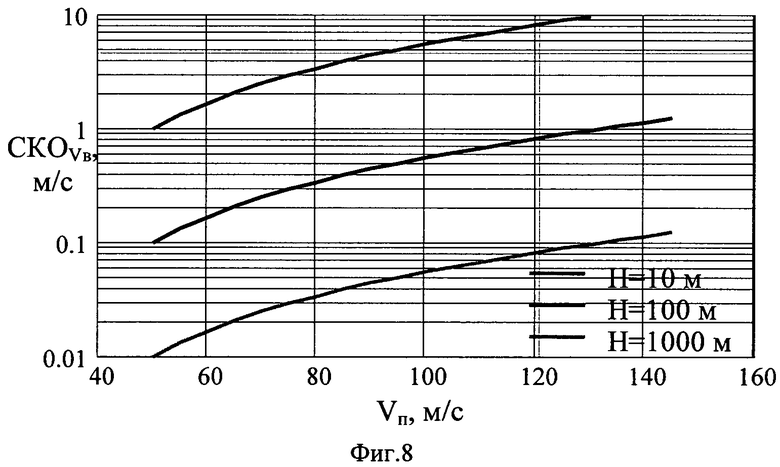
Моделированием получены зависимости средне квадратичной ошибки (СКО) измерения высоты H, путевой VП и вертикальной VВ скорости от высоты H (фиг.3, 4, 5) и путевой VП скорости (фиг.6, 7 и 8). Анализ зависимостей позволяет сделать следующие выводы:
Точность измерения высоты не зависит от высоты и слабо зависит от путевой скорости полета носителя.
СКО измерения путевой и вертикальной скоростей полета ЛА линейно зависит от высоты. Увеличение высоты в 10 раз приводит к уменьшению СКО оценки скоростей в 10 раз.
СКО измерения путевой и вертикальной скоростей полета носителя существенно нелинейно зависит от путевой скорости полета носителя. С ростом путевой скорости точность резко падает. Чем меньше высота полета, тем более резко выражено это ухудшение.
Прототипом радиовысотомера-измерителя высоты и скорости является устройство [3], в котором когерентная моноимпульсная РЛС по умолчанию содержит когерентный приемопередатчик, моноимпульсную приемопередающую антенную систему с системой сканирования по азимуту и углу места, схему управления сканированием, пороговый обнаружитель и вычислитель угловых координат ярких точек сцены. Когерентный приемопередатчик выдает на пороговый обнаружитель и вычислитель угловых координат двумерные РЛИ в координатах дальность - доплеровская частота, по которым выполняются пороговое обнаружение ярких точек сцены и определяются их угловые положения в связанной системе координат. Пеленги ярких точек и доплеровские сдвиги отраженных от них сигналов выдаются в бортовую вычислительную машину (БЦВМ). БЦВМ определяет угловое положение ярких точек в нормальной системе координат ИНС, невязку ΔF оценки доплеровского смещения сигнала ярких точек с расчетными данными, определяемыми скоростью ЛА, измеренной ИНС, и угловыми координатами ярких точек в нормальной системе координат. По невязке ΔF БЦВМ с рассчитывает ошибку измерения трех компонент вектора скорости ЛА в ИНС.
Сущность изобретения радиовысотомера, реализующего способ измерения высоты и составляющих скорости поясняется дальнейшим описанием, приложением 1 и чертежами.
В приложении 1 описан адаптивный алгоритм определения точек кривой максимального контраста РЛИ.
На фиг 1 изображен вид спектров РЛИ на нескольких дальностях.
На фиг.2 изображен вид кривых максимального контраста для совокупности параметров движения ЛА.
На фиг.3 приведены результаты моделирования СКО ошибки измерения высоты.
На фиг.4 приведены результаты моделирования СКО ошибки измерения путевой скорости в зависимости от высоты.
На фиг.5 приведены результаты моделирования СКО ошибки измерения вертикальной скорости в зависимости от высоты.
На фиг.6 приведены результаты моделирования СКО ошибки измерения высоты в зависимости от путевой скорости.
На фиг.7 приведены результаты моделирования СКО ошибки измерения путевой скорости от высоты и путевой скорости.
На фиг.8 приведены результаты моделирования СКО ошибки измерения вертикальной скорости от высоты и путевой скорости.
На фиг.9 изображена структурная схема радиовысотомера-измерителя высоты и скорости.
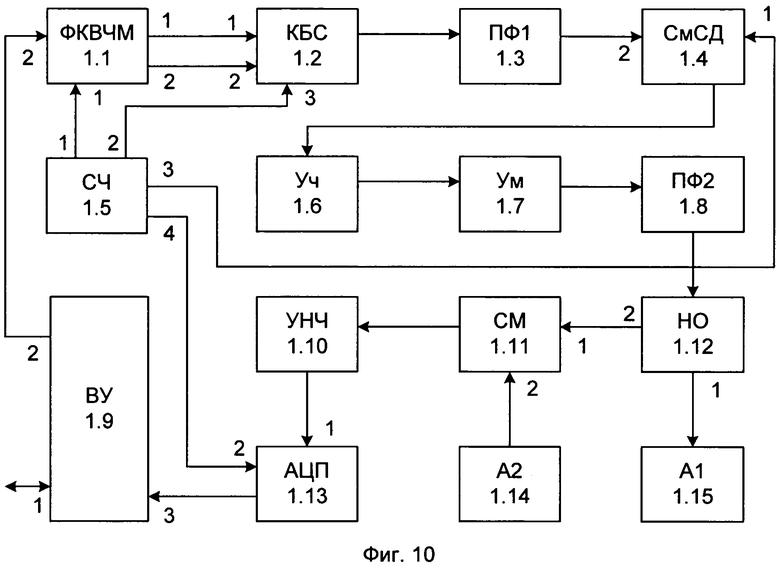
На фиг.10 изображен вариант когерентного приемопередатчика с непрерывным ЛЧМ сигналом [5].
На фиг 9 приняты следующие обозначения:
1 - Когерентный приемопередатчик (КПП);
2 - Измеритель высоты (ИВ);
3 - Вычислитель кривой максимального контраста РЛИ (ВККИ);
3.1 - Вычислитель положения скачка дисперсии (ВПСД);
3.2 - Вычислитель дисперсии шума (ВДШ);
3.3 - Вычислитель дисперсии сигнала с шумом (ВДСШ);
4 - Передающая антенна (A1);
5 - Приемная антенна (A2);
6 - Вычислитель кривой максимального контраста гипотезы (ВККГ);
7 - Вычислитель весовой матрицы (ВВМ);
8 - Схема управления вычислением высоты и скорости (СУВС);
9 - Вычислитель сигнала ошибки (ВСО).
На фиг.9 последовательно соединены приемная антенна 5, когерентный приемопередатчик 1, измеритель высоты 2, схема управления вычислением высоты и скорости 8, вычислитель кривой максимального контраста гипотезы 6 и вычислитель весовой матрицы 7,
второй выход когерентного приемопередатчика 1 соединен с входом передающей антенны 4,
последовательно соединены вычислитель кривой максимального контраста РЛИ 3 и вычислитель сигнала ошибки 9, выход которого соединен с третьим входом схемы управления вычислением высоты и скорости 8,
выход когерентного приемопередатчика 1 соединен с входом вычислителя кривой максимального контраста РЛИ,
выход вычислителя кривой максимального контраста гипотезы 6 соединен с первым входом вычислителя сигнала ошибки 9,
выход вычислителя весовой матрицы соединен с вторым входом схемы управления вычислением высоты и скорости 8, вход-выход которой является выходом устройства,
вход вычислителя кривой максимального контраста РЛИ 3 через последовательно соединенные вычислитель дисперсии шума 3.2 и вычислитель положения скачка дисперсии 3.1 соединен с выходом вычислителя кривой контраста РЛИ 3,
первый выход вычислителя положения скачка дисперсии 3.1 соединен с вторыми входами вычислителей дисперсии шума 3.2 и сигнала с шумом 3.3,
выход вычислителя дисперсии сигнала с шумом 3.3 соединен с вторым входом вычислителя положения скачка дисперсии 3.1,
первый вход вычислителя дисперсии шума соединен с первым входом вычислителя дисперсии сигнала с шумом 3.3.
На фиг.10 приняты следующие обозначения:
1.1 Формирователь квадратурного видео частотного ЧМ сигнала (ФКВЧМ),
1.2 Квадратурный балансный смеситель (КБС),
1.3 Первый полосовой фильтр (ПФ1),
1.4 Смеситель сдвига (СмСД),
1.5 Синтезатор частот (СЧ),
1.6 Умножитель частоты (Уч),
1.7 Усилитель мощности (Ум),
1.8 Второй полосовой фильтр (ПФ2),
1.9 Вычислитель (ВУ),
1.10 Усилитель низкой частоты (УНЧ),
1.11 Смеситель (См),
1.12 Направленный ответвитель (НО),
1.13 Аналого-цифровой преобразователь (АЦП),
1.14 Вторая (приемная) антенна (A2),
1.15 Первая (передающая) антенна (A1).
На фиг 10 последовательно соединены вычислитель 1.9, формирователь квадратурного видеочастотного ЧМ сигнала 1.1, квадратурный балансный смеситель 1.2, первый полосовой фильтр 1.3, смеситель сдвига 1.4, умножитель частоты 1.6, усилитель мощности 1.7, второй полосовой фильтр 1.8, направленный ответвитель 1.12, смеситель 1.11, усилитель низкой частоты 1.10 и аналого-цифровой преобразователь 1.13, второй выход формирователя видеочастотного ЧМ сигнала 1.1 соединен с одноименным входом квадратурного балансного смесителя 1.2, первый выход направленного ответвителя 1.12 соединен с входом передающей антенны 1.15, выход приемной антенны 1.14 соединен с вторым входом смесителя 1.11, первый выход синтезатора частот 1.5 соединен с одноименным входом формирователя квадратурного видеочастотного ЧМ сигнала 1.1, второй выход синтезатора частот 1.5 соединен с третьим входом квадратурного балансного смесителя 1.2, третий выход синтезатора частоты 1.5 соединен с первым входом смесителя сдвига 1.4, четвертый выход синтезатора частот 1.5 соединен с вторым входом аналого-цифрового преобразователя 1.13, первый вход-выход вычислительного устройства является входом-выходом когерентного приемопередатчика 1.
Элементы 2-9 устройства, изображенного на фиг.9, могут быть выполнены на основе единой бортовой вычислительной машины ВБ-480-01. Приемопередатчик 1 может быть выполнен по схеме [5].
Работа радиовысотомера - измерителя высоты и скорости происходит в следующей последовательности.
Когерентный приемопередатчик 1 с непрерывным излучением формирует на втором выходе зондирующий сигнал, который излучается через передающую антенну 4 вертикально в сторону земной поверхности, отраженный сигнал принимается приемной антенной 5, ориентированной параллельно направлению передающей антенны. На выходе когерентного приемопередатчика формируется РЛИ сцены 
Вычислитель положения скачка дисперсии 3.1 выдает через первый выход гипотезу о положении скачка дисперсии n на доплеровской частоте kF на вычислитель дисперсии шума 3.2 и вычислитель дисперсии сигнала с шумом 3.3, где по выражениям (2) и (3) вычисляются соответствующие дисперсии:

Значения

С помощью перебора гипотез от n=0 до К-1 для частоты kF получают массив LУ(z/n,kF), в котором по положению максимума находят положение скачка дисперсии сигнала на частоте kF, соответственно точку кривой максимального контраста РЛИ (nR,kF).
Значения nR, полученные вычислителем положения скачка дисперсии 3.1 для всех доплеровских частот kF, образуют кривую максимального контраста РЛИ nR(kF), поступающую на вычислитель сигнала ошибки 9. На первый вход вычислителя сигнала ошибки 9 приходит кривая максимального контраста гипотезы, выборки которой образуют вектор Ri(kF,Xi), соответствующий гипотезе Xi=(Hi,VПi,VВi)T.
Формирование кривой максимального контраста гипотезы происходит следующим образом. Измеритель высоты 2 по каждому РЛИ 
Для исходной гипотезы (i=0) в качестве высоты берут первичную оценку высоты H, в качестве путевой и вертикальной скорости - соответствующие центры априорно известных окон. Вычислитель кривой контраста гипотезы 6 по выражению (5) вычисляет кривую максимального контраста Ri(kF,Xi) в априорно известном окне наклонных дальностей от H-2ΔH до 

Вычислитель сигнала ошибки 9 вычисляет разность двух поступающих на него векторов, соответствующих кривым контраста РЛИ и гипотезы, с получением вектор сигнала ошибки 
Сигнал ошибки 
где Wi - весовая матрица, вычисляемая вычислителем весовой матрицы 7 с учетом данных кривой контраста для текущей гипотезы:


Расчет элементов матрицы Di производится по выражениям (7)…(11);

Находят уточненную оценку вектора измеряемых параметров
Xi+1=Xi+ΔXi.
Схема управления вычислением высоты и скорости 8 повторяет итерации уточнения вектора измеряемых параметров Xi до снижения вектора ошибки ΔXi до допустимых значений, переходит в режим слежения, выдает потребителю оценки высоты Hi путевой VПi и вертикальной VВi составляющих скорости в режиме слежения через вход-выход связи с потребителем.
Когерентный приемопередатчик 1 с непрерывным ЛЧМ сигналом может быть выполнен по схеме на фиг.10. Работа его описана в [5] и здесь не приводится.
Техническим преимуществом предлагаемого способа и устройства является возможность измерения высоты и скорости летательного аппарата одним устройством на базе радиовысотомера с однолучевой малогабаритной антенной системой. За счет использования большого числа точек кривой максимального контраста способ и устройство обладают сниженной дисперсией ошибки измерения высоты и составляющих скорости, кроме того за счет вертикального зондирования обеспечивается устойчивая работа измерителя высоты и составляющих скорости над разными видами подстилающей поверхности, включая морскую.
Пользуясь сведениями, представленными в материалах заявки, предлагаемый радиовысотомер - измеритель высоты и составляющих скорости летательного аппарата может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при навигации различных летательных аппаратов, в том числе вертолетов на участке пилотирования и проведения монтажных работ.
Приложение 1
Адаптивный алгоритм определения точек кривой максимального контраста РЛИ
Совместная плотность вероятности выборок сигнала согласованного фильтра 


где 

PПР(n,kF) - мощность принятого сигнала от (n,kF) элемента разрешения;
Максимум функционала (2) соответствует оценке задержки n отраженного сигнала. Для реализации алгоритма необходимы априорные данные о значениях 


где 
Решение системы уравнений (3) и (4) имеет вид:


После подстановки в (2) значений (6) получим адаптивный алгоритм определения положения n(kF) скачка дисперсии на частоте kF по максимуму функционала правдоподобия:

где CНИ - постоянный коэффициент.
Учитывая то, что постоянный множитель 

ЛИТЕРАТУРА
1. Патент России №2414721 Способ радиолокационного измерения скорости объекта.
2. Патент США №7791529 System for estimating the speed of an aircraft, and application thereof to detecting obstacles.
3. Патент России №2411538 Способ определения ошибки измерения скорости ЛА инерциальной навигационной системой и бортовой навигационный комплекс для его реализации.
4. Патент России №2347235 Способ формирования когерентного частотно-модулированного сигнала для РЛС с периодической ЧМ модуляцией и устройство, реализующее способ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
Изобретение относится к радиолокации протяженных целей и может быть использовано для измерения высоты и составляющих скорости летательных аппаратов (ЛА). Достигаемый технический результат - однолучевое измерение скорости летательного аппарата на базе радиовысотомера, позволяющее измерить высоту и составляющие скорости ЛА при сниженных габаритах антенной системы. Указанный результат достигается за счет того, что производится вертикальное зондирование земной поверхности радиолокационным сигналом через широко направленную антенну, когерентный прием отраженного сигнала с получением двумерного радиолокационного изображения (РЛИ) местности в координатах дальность - доплеровская частота, первичная оценка высоты ЛА как минимальная, усредненная по нескольким измерениям дальность до точек РЛИ, превышающих порог обнаружения, нахождение кривой максимального контраста РЛИ в координатах дальность - доплеровская частота, уточнение методом итераций гипотезы измеряемых параметров за счет расчета кривой максимального контраста, соответствующего гипотезе, формирование сигнала ошибки кривой максимального контраста гипотезы относительно кривой максимального контраста РЛИ, преобразование сигнала ошибки кривой контраста в сигнал ошибки измеряемых параметров, сложение его с уточняемой гипотезой, повторение итераций и выдача в режиме слежения измеренные параметры высоты, вертикальной и путевой составляющих скорости потребителю. 3 н.п.,2 з.п.ф-лы, 10 ил., Приложение 1.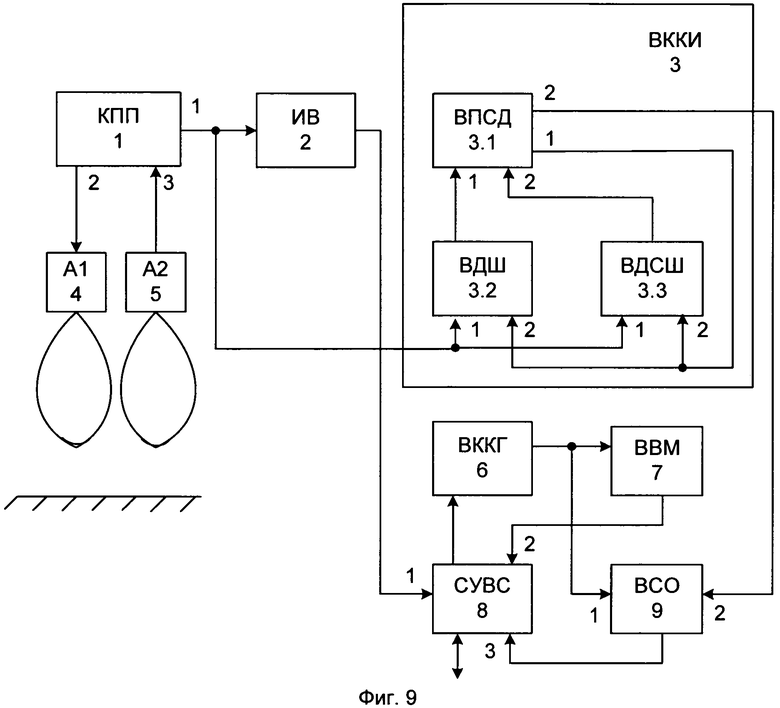
1. Способ радиолокационного измерения высоты и составляющих скорости летательного аппарата (ЛА), включающий зондирование земной поверхности радиолокационным сигналом, когерентный прием отраженного сигнала с получением двумерного радиолокационного изображения (РЛИ) z(n,kF) местности в координатах дальность - доплеровская частота, определение разрешаемых элементов РЛИ, мощность отраженного сигнала от которых превышает порог обнаружения, отличающийся тем, что зондирование производится вертикально через широко направленную антенну радиовысотомера, прием отраженного сигнала производится лучом, аналогичным передающему лучу по направлению и ширине диаграммы направленности, разрешение РЛИ по доплеровской частоте не должно превышать отношения максимальной путевой скорости ЛА к горизонтальному размеру разрешаемого кольца дальности на границе облученного участка поверхности, после определения разрешаемых элементов РЛИ, мощность отраженного сигнала от которых превышает порог обнаружения, производят первичную оценку высоты ЛА НП, выполняют селекцию РЛИ в окне дальностей, начальное положение которого соответствует первичной оценке высоты ЛА, сниженной на удвоенную априорно известную величину ее погрешности, а конец - положению максимально удаленной точки кадра РЛИ, амплитуда которой превышает порог обнаружения, находят кривую максимального контраста селектированного участка РЛИ nR(kF) в координатах дальность - доплеровская частота, задаются исходной i=0 гипотезой о векторе измеряемых параметров  включающий высоту, путевую VП и вертикальную VB составляющие скорости, в качестве исходного значения высоты Н берут оценку первичной высоты ЛА НП, в качестве исходных значений путевой VП и вертикальной VB скоростей берут центры априорно известных соответствующих окон, уточняют методом итераций гипотезу измеряемых параметров
включающий высоту, путевую VП и вертикальную VB составляющие скорости, в качестве исходного значения высоты Н берут оценку первичной высоты ЛА НП, в качестве исходных значений путевой VП и вертикальной VB скоростей берут центры априорно известных соответствующих окон, уточняют методом итераций гипотезу измеряемых параметров  в последовательности: рассчитывают кривую максимального контраста
в последовательности: рассчитывают кривую максимального контраста  соответствующую гипотезе
соответствующую гипотезе  вычисляют вектор-сигнал ошибки
вычисляют вектор-сигнал ошибки  равный разности вектор-гипотезы кривой максимального контраста
равный разности вектор-гипотезы кривой максимального контраста  и вектор-кривой максимального контраста РЛИ
и вектор-кривой максимального контраста РЛИ  координатами вектор-гипотезы кривой максимального контраста
координатами вектор-гипотезы кривой максимального контраста  являются значения кривой максимального контраста
являются значения кривой максимального контраста  соответствующей гипотезе
соответствующей гипотезе  значениями координат вектор-кривой максимального контраста РЛИ
значениями координат вектор-кривой максимального контраста РЛИ  являются значения кривой максимального контраста nR(kF), δR - разрешение зондирующего сигнала по дальности, преобразуют вектор-сигнал ошибки
являются значения кривой максимального контраста nR(kF), δR - разрешение зондирующего сигнала по дальности, преобразуют вектор-сигнал ошибки  в вектор-сигнал ошибки измеряемых параметров с помощью весовой матрицы Wi, складывают вектор-сигнал ошибки измеряемых параметров
в вектор-сигнал ошибки измеряемых параметров с помощью весовой матрицы Wi, складывают вектор-сигнал ошибки измеряемых параметров  с вектором уточняемой гипотезы
с вектором уточняемой гипотезы  с получением нового уточненного вектора измеряемых параметров
с получением нового уточненного вектора измеряемых параметров  повторяют итерации и получают в режиме слежения итоговый вектор измеряемых параметров, включающий высоту H, путевую VП и вертикальную VB составляющие скорости.
повторяют итерации и получают в режиме слежения итоговый вектор измеряемых параметров, включающий высоту H, путевую VП и вертикальную VB составляющие скорости.
2. Способ радиолокационного измерения высоты и составляющих скорости летательного аппарата (ЛА) по п. 1, отличающийся тем, что кривую максимального контраста радиолокационного изображения (РЛИ) nR(kF) получают в следующей последовательности: вычисляют мощность принятого сигнала на каждой дальности k,  kF-того сечения РЛИ, для чего суммируют квадраты соответствующих квадратурных спектральных составляющих сигнала, вычисляют для kF-той спектральной составляющей принятого сигнала математическое ожидание мощности принятого сигнала на дальностях от нуля до n-1 и от n до K-1 с получением дисперсии шума
kF-того сечения РЛИ, для чего суммируют квадраты соответствующих квадратурных спектральных составляющих сигнала, вычисляют для kF-той спектральной составляющей принятого сигнала математическое ожидание мощности принятого сигнала на дальностях от нуля до n-1 и от n до K-1 с получением дисперсии шума  и дисперсии сигнала с шумом
и дисперсии сигнала с шумом  соответственно, вычисляют для каждого сечения кадра РЛИ по доплеровской частоте kF функционалы соответствия
соответственно, вычисляют для каждого сечения кадра РЛИ по доплеровской частоте kF функционалы соответствия  принятого сигнала z гипотезе (n, kF) как весовые суммы логарифмов дисперсий шума
принятого сигнала z гипотезе (n, kF) как весовые суммы логарифмов дисперсий шума  и сигнала с шумом
и сигнала с шумом  весом первого логарифма является число минус n, весом второго логарифма является число минус (К-n), находят положение скачка мощности (nR,kF) по гипотезе, соответствующей максимальному значению функционала соответствия
весом первого логарифма является число минус n, весом второго логарифма является число минус (К-n), находят положение скачка мощности (nR,kF) по гипотезе, соответствующей максимальному значению функционала соответствия  в kF-том сечении РЛИ, находят кривую nR(kF) максимального контраста наблюдаемого РЛИ по результатам определения скачка (nR,kF) на всех доплеровских сечениях kF кадра РЛИ.
в kF-том сечении РЛИ, находят кривую nR(kF) максимального контраста наблюдаемого РЛИ по результатам определения скачка (nR,kF) на всех доплеровских сечениях kF кадра РЛИ.
3. Способ радиолокационного измерения высоты и составляющих скорости летательного аппарата (ЛА) по п. 1, отличающийся тем, что весовая матрица Wi для i-той гипотезы измеряемых параметров  вычисляется в следующей последовательности: вычисляют матрицу якобиана преобразования Di вектор-гипотезы кривой максимального контраста
вычисляется в следующей последовательности: вычисляют матрицу якобиана преобразования Di вектор-гипотезы кривой максимального контраста  по высоте Hi, путевой VПi и вертикальной VBi составляющим скорости, вычисляют произведение двух сомножителей, первым сомножителем является матрица, равная произведению транспонированной матрицы якобиана преобразования
по высоте Hi, путевой VПi и вертикальной VBi составляющим скорости, вычисляют произведение двух сомножителей, первым сомножителем является матрица, равная произведению транспонированной матрицы якобиана преобразования  на обратную матрицу дисперсий ошибок определения дальности φ-1 и на матрицу якобиана преобразования Д, второй сомножитель произведение транспонированной матрицы преобразования
на обратную матрицу дисперсий ошибок определения дальности φ-1 и на матрицу якобиана преобразования Д, второй сомножитель произведение транспонированной матрицы преобразования  на обратную матрицу дисперсий ошибок определения дальности φ-1.
на обратную матрицу дисперсий ошибок определения дальности φ-1.
4. Радиовысотомер-измеритель высоты и скорости, содержащий когерентный приемопередатчик, второй выход которого соединен с входом передающей антенны, на первом выходе когерентный приемопередатчик формирует радиолокационное изображение (РЛИ) сцены в координатах дальность - доплеровская частота, отличающийся тем, что передающая антенна когерентного приемопередатчика широко направленная, ориентированная к земной поверхности по вертикали, в устройство дополнительно введены приемная антенна, соединенная с третьим входом когерентного приемопередатчика, аналогичная передающей и направленная параллельно ей, последовательно соединенные измеритель высоты, схема управления вычислением высоты и скорости, вычислитель кривой максимального контраста гипотезы и вычислитель весовой матрицы, последовательно соединены вычислитель кривой максимального контраста РЛИ, вычислитель сигнала ошибки, выход которого соединен с третьим входом схемы управления вычислением высоты и скорости, первый выход когерентного приемопередатчика соединен с входами вычислителя кривой максимального контраста РЛИ и измерителя высоты, выход вычислителя кривой максимального контраста гипотезы соединен с входом вычислителя сигнала ошибки, выход вычислителя весовой матрицы соединен со вторым входом схемы управления вычислением высоты и скорости, вход-выход которой является выходом устройства.
5. Вычислитель кривой максимального контраста радиолокационного изображения (РЛИ) по п. 4, содержащий вычислитель дисперсии сигнала с шумом, последовательно соединенные вычислитель дисперсии шума и вычислитель положения скачка дисперсии, второй выход которого является выходом вычислителя кривой максимального контраста РЛИ, первый выход вычислителя положения скачка дисперсии соединен со вторыми входами вычислителя дисперсии шума и вычислителя дисперсии сигнала с шумом, выход вычислителя дисперсии сигнала с шумом соединен со вторым входом вычислителя положения скачка дисперсии, вход вычислителя кривой максимального контраста РЛИ соединен с первыми входами вычислителя дисперсии шума и вычислителя дисперсии сигнала с шумом.

