Изобретение относится к техническим средствам автоматизации, а именно к пневматическим, двухпозиционным регуляторам.
Цель изобретения - расширение функциональных возможностей. .
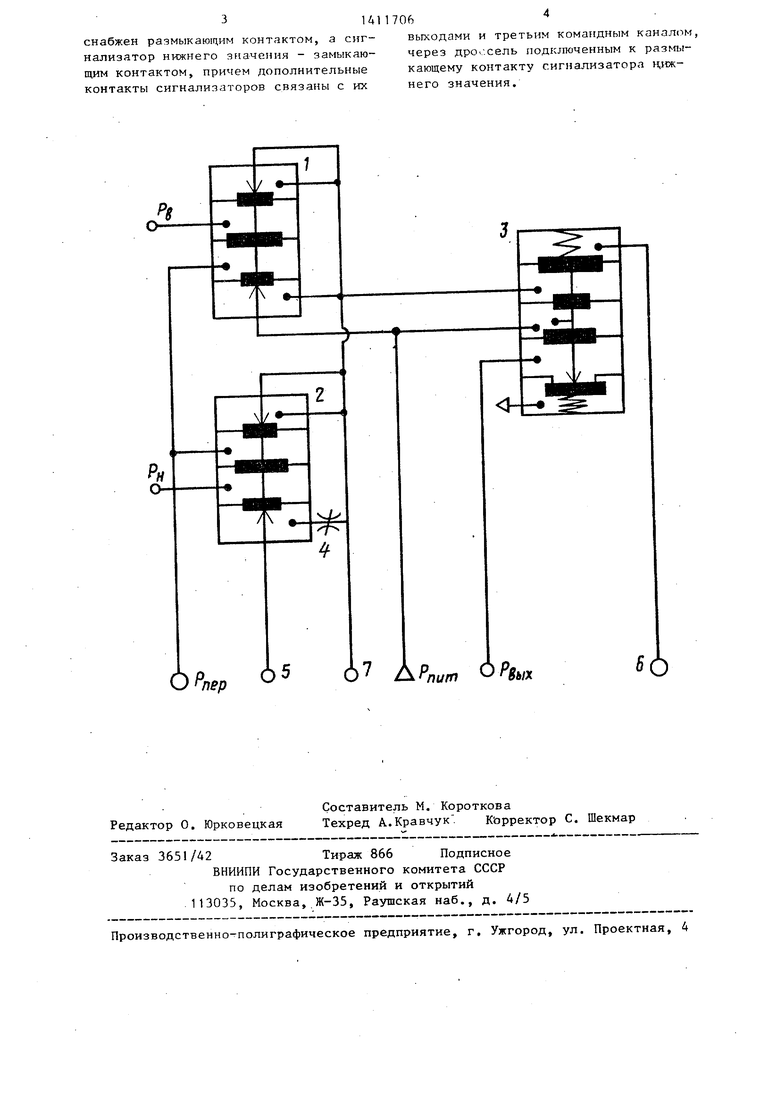
На ертеже приведена принципиальная схема предложенного регулятора.
Регулятор содержит сигнализатор верхнего значения, сигнализатор 2 нижнего значения, вькодное реле 3, дроссель 4 и три командных канала
5-7.
Выходы сигнализаторов 1 и 2 соединены непосредственно с плюсовой камерой выходного реле 3 и третьим командным каналом 7, через замыкающий контакт сигнализатора 1 с каналом питания и через дроссель 4 и раз- мыкающий контакт сигнализатора 2 с каналом сброса и первым командным каналом 5. Выход реле 3 связан с выходным каналом регулятора Pg,, , а его минусовая камера - с вторым командным каналом 6 Входные камеры.сигнализаторов соединены с каналом регулируемой переменной P(igp и каналами граничных значений: верхнего Р и нижнего Pf,.
Регулятор работает следующим образом.
При работе в комплекте с аналоговым датчиком регулируемой переменной первый командный канал 5 сообщен с атмосферой, а третий командный канал 7 заглушен.
С помощью задатчиков (не показаны формируются требуемые пороговые значимя Рц и Pg о
Пока входной сигнал Рпер меньще нижней границы Р ,, давление в плюсовой
п
камере выходного реле, а соответственВ
но, и на его выходе, равно нулю. момент достижения равенства , нижний контакт сигнализатора 2 размыкается, но состояние его выхода и вькода регулятора не изменяется. Когда входной сигнал превыщает
верхнюю границу
PJ, на выходе
сигнализатора 1 формируется единичный дискретный сигнал, повторяемый с усилением по мощности выходным реле Зо
10
г
1520117062
При этом замыкается ш гжний контакт (жгнализатора 2, давление из плюсовой камеры выходного реле 3 сбрасывается до атмосферного с задержкой во времени, определяемо настройкой дросселя 4„
При подключении датчиков с дискретным выходом к командным каналам 6 и 7 осуществляется двухпозиционное регулирование технологического параметра по верхнему и нргжнему граничным значениям, контролируемым этими датчиками. Командные каналы 5-7, а также каналы регулируемой переменной
-пер
и задания Р и
различных
сочетаниях могут использоваться для введения дополнительньк блокировок по внещним сигналам.
Например, появление единичного сигнала в первом или третьем командных каналах, а также условие Рпер 6 ЭА обеспечивают вьгсокий уровень
на выходе регулятора: диск- ретный единичный сигнал во втором командном канале 6 обнуляет выход регулятора {Pg, 0).
Предложенный регулятор по сравнению с известным позволяет расширить фзшкциональные возможности, благодаря чему обеспечивается использование его в сложных системах управления связанными технологическими переменными о
Формула изобретения
Пневматический двухпозиционный регулятор, содержащий сигнализатор верхнего значения, снабженный замыкающим контактом и каналом питания, сигнализатор нижнего значения, снабженный размыкающим контактом и каналом сброса, выходное реле, выход которого связан с выходным каналом регулятора, выход сигнализатора верхнего значения связан через замыкающий контакт с каналом питания и непосредственно с плюсовой камерой выходного реле и выходом сигнализатора нижнего значения, размыкающий контакт которого сообщен с каналом сброса И первым командным каналом, второй из которых соединен с минусовой камерой выходного реле, о т л ri ч а ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический двухпозиционный регулятор | 1985 |
|
SU1287101A1 |
| Пневматический двухпозиционный регулятор | 1983 |
|
SU1128222A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
| Пневматический двухпозиционный регулятор | 1989 |
|
SU1661720A1 |
| Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности | 1989 |
|
SU1755256A1 |
| Пневматический регулятор с органичениями выходного сигнала | 1982 |
|
SU1062643A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматический двухпозиционный регулятор | 1986 |
|
SU1409970A1 |
| Пневматический регулятор переменной структуры | 1975 |
|
SU542170A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
Изобретение относится к техническим средствам автоматизации, а именно к пневматическим двухпозиционным регуляторам. Цель изобретения - расширение фзткционапьных возможностей. Регулятор содержит два двухконтактных сигнализатора граничных значений, выходное реле и три командных канала, причем первый из них связан с каналом сброса сигнализатора нижнего значения, второй - с.минусовой камерой выходного реле, а третий соединен непосредственно с плюсовой камерой выходного реле и через дроссель с размыкающим контактом сигнализатора нижнего значения. Благодаря этому обеспечивается возможность блокировок по внешним дискретным сигналам. 1 ил. а &
При дальнейших изменениях входногосг щ и и с я тем, что, с целью расширесигнала выходной сигнал сохраняется неизменным и равным 1, пока регулируемая величина не станет меньще нижней границы Рпер РН
ния функциональных возможностей, к нему подключен третий командный канал, дополнительно установлен дроссель, сигнализатор верхнего значения
ния функциональных возможностей, к нему подключен третий командный канал, дополнительно установлен дроссель, сигнализатор верхнего значения
U117064
снабжен размыкающим контактом, а снг- выходами и третьим командным каналом,
нализатор нижнего зр1ачення - замыкающим контактом, причем дополнительные контакты сигнализаторов связаны с их
через дроосель подключенным к размыкающему контакту сигнализатора циж- него значения.
через дроосель подключенным к размыкающему контакту сигнализатора циж- него значения.
67 ЛЯли/я PS
Ш
«6
| ПНЕВМАТИЧЕСКИЙ ДВУХПОЗИЦИОННЫЙ РЕГУЛЯТОР С НАСТРАИВАЕМОЙ ЗОНОЙ НЕЧУВСТВИТЕЛЬНОСТИ | 0 |
|
SU341011A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический двухпозиционный регулятор | 1985 |
|
SU1287101A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
