переключающее реле, выход которого соединен с линией исполнительного механизма, размыкающий контакт - с выходом пропорционального блока, а замыкающий контакт - с выходом внешнего источника управляющего сигнала.
Известный регулятор обладает сложной конструкцией и не обеспечивает точного повторения внешнего управляющего давления выходным сигналом регулятора в момент изменения режима, т.е. переход в режим автоматической стабилизации сопровождается скачком в линии исполнительного механизма.
Цель изобретения - улучшение точности и упрощение конструкции.
Поставленная цель достигается тем, что в регуляторе дополнительно установлены повторитель, три замыкающих контакта и логический блок, узел реверсирования выполнен в виде второго и третьего переключающих реле, выходы которых соединены соответственно с плюсовым и минусовым входом пропорционального блока. Логический блок состоит из трех дросселей, элемента НЕ, двух элементов ДА, элемента И и элемента ИЛИ, причем канал отключающего сигнала связан одним из входов элемента ИЛИ через первый дроссель - с первым входом элемента И, через второй дроссель - с входами элемента НЕ и первого элемента ДА. Выход элемента НЕ связан с вторым входом элемента И, выход первого элемента ДА через третий дроссель и второй элемент ДА соединен с вторым входом элемента ИЛИ. Выход пропорционального блока через последовательно соединенные второй контакт, повторитель и третий контакт связан с емкостью, подключенной через первый контакт к линии исполнительного механизма, управляющие цепи первого и второго контактов связаны с каналом отключающего сигнала, управляющие цепи третьего контакта подключены к выходу элемента И, управляющие цепи второго и третьего переключающих реле - к выходу первого элемента ДА, а управляющие цепи первого переключающего реле - к выходу элемента ИЛИ.
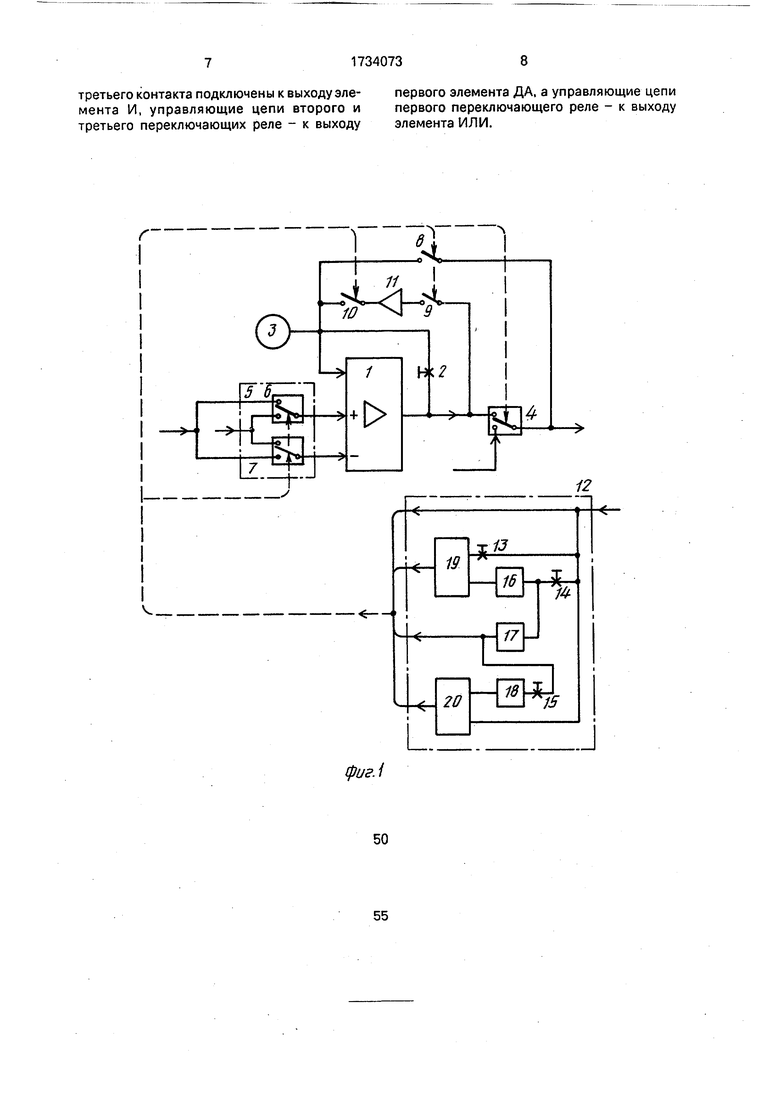
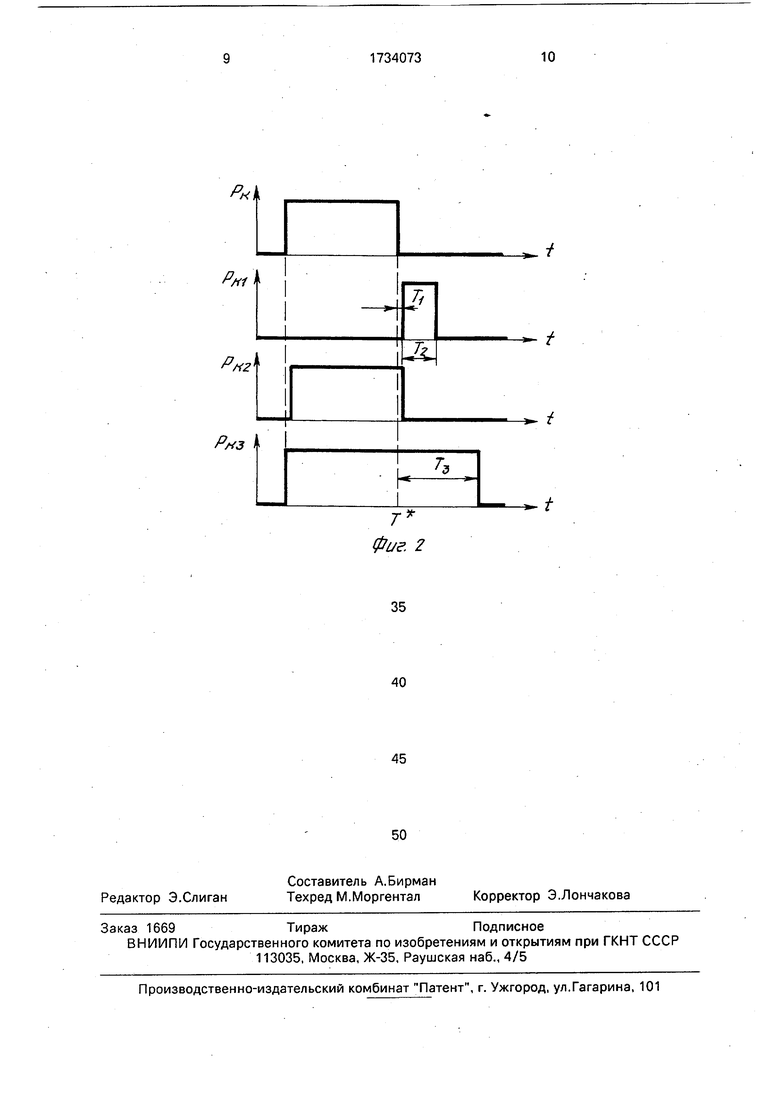
На фиг.1 приведена принципиальная схема регулятора; на фиг.2 - временная диаграмма работы логического блока.
Регулятор содержит пропорциональный блок 1, последовательно соединенные переменный дроссель 2 настройки времени изодрома и емкость 3, первое переключающее реле 4, узел 5 реверсирования, состоящий из второго 6 и третьего 7 переключающих реле, первый 8, второй 9 и третий 10 замыкающие контакты, повторитель 11, логический блок 12, состоящий из трех дросселей 13-15, элемента НЕ 16, двух элементов ДА 17 и 18, элемента И 19 и элемента ИЛИ 20.
5Каналы регулируемой переменной РПер
и задающего воздействия Рзэ соединены с разноименными входами переключающих реле 6 и 7, выходы которых подключены соответственно к плюсовому и минусовому
0 входам пропорционального блока 1, единичный вход которого (контрольная точка регулятора) связан с емкостью 3. Выходной сигнал пропорционального блока связан с выходом регулятора Ррег и через размыкаю15 щий контакт первого переключающего реле 4 соединен с линией исполнительного механизма Рим, а через последовательно соединенные второй контакт 9, повторитель 11 и третий контакт 10 - с емкостью 3.
0 Внешний источник управляющего сигнала Рупр (цифровой регулятор или задатчик дистанционного управления) через замыкающий контакт 4 реле связан с линией исполнительного механизма Рим, подключенной
5 через первый контакт 8 к емкости 3.
Канал отключающего сигнала Рк соединен через первый дроссель 13 с первым входом элемента И 19, через второй дроссель 14 - с входами элемента НЕ 16 и пер0 вого элемента ДА 17 и непосредственно - с одним из входов элемента ИЛИ 20. Выход элемента НЕ 16 соединен с вторым входом элемента И 19. Выход первого элемента ДА 17 через третий дроссель 15 и второй эле5 мент ДА 18 связан с вторым входом элемента ИЛИ 20. Управляющие цепи первого и второго контактов 8 и 9 связаны с каналом отличающего сигнала Рк, цепи третьего контакта 10 - с выходом элемента И РКч, цепи
0 второго и третьего переключающих реле 6 и 7 - с выходом первого элемента ДА Рк-,, а цепи первого переключающего реле 4 - с выходом элемента ИЛИ Рк.
5 Регулятор работает следующим образом.
В режиме нормального функционирования управляющий сигнал Рим в линии исполнительного механизма формируется с
0 помощью внешнего блока управления (цифрового регулятора или задатчика ручного дистанционного управления). В этом режиме дискретный сигнал в канале отключающего сигнала имеет значение логической
5 единицы: Рк 1. Соответственно: PKZ Рк-3 1 и Рк., 0. С помощью первого переключающего реле4 и контакта 8 канал внешнего управляющего сигнала соединен с линией исполнительного механизма и с емкостью 3:
Рим Рупр И Ри Рупр.
Переключающие реле 6 и 7 узла 5 реверсирования изменяют свое состояние, обеспечивая тем самым изменение направления действия регулятора с прямого на обратный (изменяют полярность включения регулято- ра): Ррег - Ри - К (Рпер - РЗД), где К - коэффициент усиления регулятора. Это давление через замкнутый контакт поступает на вход повторителя 11, т.е. Рп - Ррег.
Переход с режима внешнего управле- ния на режим автоматической стабилизации (Резерв) инициируется изменением уровня отключающего сигнала: Рк О (вручную или с помощью автоматических специальных технических средств). По этому сигналу размыкаются контакты 8 и 9, а в глухой камере повторителя 11 фиксируется давление Ррег, соответствующее моменту времени Т, т.е. началу перехода:
Рп - Ррег Рурп - К (Рпер РЗД).
Затем, с задержкой Тя50 мс (определяется дросселем 14), под действием команды Ркг 0 переключающие реле 6 и 7 принимают исходное состояние (каналы Рпер и Р3д коммутируются соответственно с плюсовым и минусовым входами блока 1), а на выходе элемента И 19 формируется короткий единичный импульс PK-J 1 длительностью ,3 - 0,5 с (определяется дросселем 13).
Под действием этого импульса в ем- кость 3 вводятся новые начальные условия, соответствующие моменту Рупр - - К (Рпер - РЗД).
После окончания переходных процессов, вызванных переключением в схеме, вы- ходной сигнал регулятора принимает значение: v
Ррег К (Рпер - РЗД) + Ри Рупр.
С требуемой задержкой Тз-1,5 - 3,0 с (определяется дросселем 15) дискретный сигнал на выходе элемента ИЛИ 20 принимает нулевое значение: РКЗ 0, а линия исполнительного механизма отключается от внешнего источника управляющего сигнала Рупр и соединяется с выходом регуля-
ТОра Ррег.
За счет автоматического поддержания равенства Ррег Рим включение резервного регулятора осуществляется без скачка даже при нулевом рассогласовании: Рпер f РЗД.
По сравнению с известным предлагаемый регулятор обеспечивает уменьшение величины скачка в линии исполнительного механизма (Ррег - Рим) в два - три раза. Кроме того, дополнительные аналоговые уз- лы известного регулятора (сумматор и пропорциональный блок) заменены более простыми дискретными элементами логического блока и контактной схемой.
По сравнению с известным, в качестве которого выбран серийный регулятор РР3.31М, предлагаемый регулятор отличается свойством автоматической подготовки к безударному изменению режима. Кроме того, по сравнению со стандартной процедурой подготовки, предусмотренной схемой станции управления прибора ПВ10.1Э, регулятор позволяет уменьшить величину скачка (Ррег - Рим) в 5-10 раз (в области больших значений коэффициента усиления регулятора).
Формула изобретения Пневматический резервный регулятор, содержащий узел реверсирования, каналы регулируемой переменной и задающего воздействия, пропорциональный блок, последовательно соединенные дроссель настройки времени изодрома и емкость, выход которой связан с единичным входом пропорционального блока,канал отключающего сигнала и первое переключающее реле, выход которого соединен с управляющим входом исполнительного механизма, размыкающий контакт- с выходом пропорционального блока, а замыкающий контакт - с выходом внешнего источника управляющего сигнала, отличающийся тем, что, с целью улучшения точности и упрощения конструкции, в нем дополнительно установлены повторитель, три замыкающих контакта и логический блок, состоящий из трех дросселей, элемента НЕ, двух элементов ДА, элемента И и элемента ИЛИ, а узел реверсирования выполнен в виде второго и третьего переключающих реле, разноименные входы которых подключены к каналам регулируемой переменной и задающего воздействия, а выходы соединены соответственно с плюсовым и минусовым входами пропорционального блока, причем канал отключающего сигнала связан с одним из входов элемента ИЛИ, через первый дроссель -с первым входом элемента И, через второй дроссель - с входами элемента Н Е и первого элемента ДА, вход элемента НЕ подключен к второму входу элемента И, выход первого элемента ДА через последовательно соединенные третий дроссель и второй элемент ДА соединен с вторым входом элемента ИЛИ, выход пропорционального блока через последовательно соединенные второй контакт, повторитель и третий контакт связан с емкостью, подключенный через первый контакт к выходному каналу и управляющему входу исполнительного механизма, управляющие цепи первого и второго контактов связаны с каналом отключающего сигнала, управляющие цепи
третьего контакта подключены к выходу эле- первого элемента ДА, а управляющие цепи мента И, управляющие цепи второго и первого переключающего реле - к выходу третьего переключающих реле - к выходу элемента ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический пропорционально-интегральный регулятор | 1989 |
|
SU1659978A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Пневматический пропорциональноинтегральный регулятор | 1975 |
|
SU532081A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Пневматический пропорционально-интегральный регулятор | 1990 |
|
SU1691818A2 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| Пневматический регулятор | 1978 |
|
SU926616A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1972 |
|
SU429414A1 |
Изобретение относится к техническим средствам автоматизации. Цель изобретения - повышение точности и упрощение конструкции -достигается за счет введения новых элементов и связей. Регулятор содержит узел реверсирования, каналы регулируемой переменной и задающего воздействия, пропорциональный блок, инерционное звено дроссель-емкость, переключаюИзобретение относится к техническим средствам автоматизации, а именно к пневматическим регуляторам, используемым в качестве резервных в комбинированных пневмоэлектронных системах непосредственного цифрового регулирования. Известны пневматические регуляторы, обеспечивающие возможность безударного перехода в режим автоматической стабилизации и содержащие пропорциональный блок, апериодическое звено дроссель - емкость и переключающее реле. щее реле, три замыкающих контакта, повторитель, канал отключающего сигнала и логи- ческий блок. Узел реверсирования выполнен в виде двух переключающих реле, разноименные входы которых связаны с каналами регулируемой величины и задания, а выходы подключены к плюсовой № минусовой камерам пропорционального блока, выход которого через размыкающий контакт переключающего реле соединен с входом исполнительного механизма, связанного через замыкающий контакт переключающего реле с каналом внешнего управляющего сигнала, а через первый замыкающий контакт-с емкостью. Выход пропорционального блока через последовательно соединенные второй контакт, повторитель и третий контакт сообщен с емкостью. Управляющие цепи переключающих реле и контактов связаны с выходами логического блока. Такое решение позволяет автоматически осуществить безударный переход системы в режим резервного регулирования. 2 ил. СО с Однако эти регуляторы обладают сложной конструкцией. Наиболее близким к предлагаемому является регулятор, содержащий узел реверсирования, разноименные входы которого подключены к каналам регулируемой переменной и задающего воздействия, пропорциональный блок, последовательно соединенные дроссель настройки времени изодрома и емкость, связанные с единичным входом пропорционального блока, канал отключающего сигнала и первое XI СА) - О XI СО
Г
I 11
,
$CZ
4t
sL
izS
v
в
У
:
i
Не
чГК
i
12
19
т/
7S
L
J
Т Фиг. 2
| Пневматический пропорционально-интегральный регулятор | 1985 |
|
SU1246051A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент Великобритании № 1104853, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
