(54) ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР ПЕРЕМЕННОЙ СТРУКТУРЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический двухпозиционный регулятор | 1989 |
|
SU1661720A1 |
| Пневматический двухпозиционный регулятор | 1983 |
|
SU1128222A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР ПЕРЕМЕННОЙ СТРУКТУРЫ | 1973 |
|
SU364924A1 |
| Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности | 1989 |
|
SU1755256A1 |
| Пневматический привод | 1982 |
|
SU1115018A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
| Пневматический двухпозиционный регулятор | 1987 |
|
SU1411706A1 |
| Пневматический двухпозиционный регулятор | 1976 |
|
SU623180A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
Изобретение относится к области приборостроения.
Известны пневматические регуляторы с изменяемыми прсдела ш зоны нечувствительности, реализующие при выходе сигнала переменной за установлениъ е пределы либо позиционный закон регулирования I;, либо пропорциональный 2, либо интегральный 3. Известные регуляторы не обеспечивают в иелом ряде случаев качественного регулирования технологического процесса.
Зиачителыю лучигие результаты получают с помощью зониых регуляторов перемениой стрз-ктурь с функцией переключения видаз ignif, -oe/di), где - величина рассогласования регулируемого пара.метра и соответст)зуюшей гран-инь) зоны нечувствительности.
Наиболее близким техническим решением к данному изобретент-по является пневматический регулятор переменной структуры, содержащей вычислительный блок. БХО.ГТЫ которого подключены к входдому каналу и выходам первого и второго задатщ1ков, соединенных с первыми входам сигнализаторов верхнего и нижнего отклонений параметра, вторые входы которых подключены к входному каналу, выход вычислитедького блока соединен с
входом регулируюп.1его блока, другие входы которого подключены к выходам блока задания переменных коэффициентов, и сигнализатор знака производной соединошой с входным канапом 4.
Этот регулятор имеет сложную конструкцию, так как входящая в него схема равнозначность реализуется на нескольких злементах и для обеспечения четкого функционирования регулятора на всех режимах его работы сигнализатор нижнего отклонения должен быть достаточно мощным из-за явления короткого замыкания в трехмембранном оеле.
Целью изобретения является упрощение регуля15 тора.
Для этого в предложенном регуляторе установлены 1тва трехмембракных реле, включенные по схеме импликация, причем выход сигнализатора знака производной соединен с плюсовой управляющей камерой первого трехмембранного реле и минусовой управляющей камерой второго трехмембранного реле. Вторые управляющие камеры реле подключены к выходам сигнализаторов верхнего и нижнего отклонений. Канал питания второго реле подключен к выходу первого реле, а выход
второго реле - к управляющему каналу блока задания переменных коэффициентов.
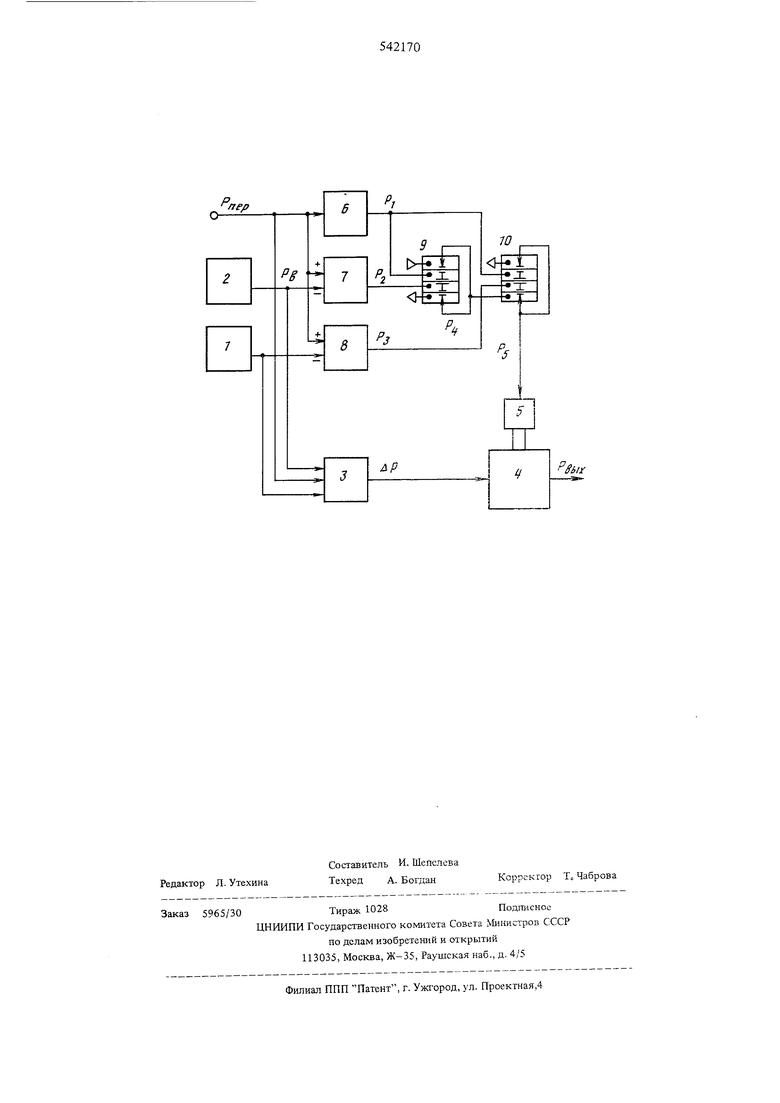
На чертеже приведена принципиальная схема регулятора.
Регулятор состоит из двух задатчиков 1 и 2 для формирования нижней и верхней границ зоны нечувствительности, вычислительного блока 3 для формирования зоны нечувствительности, регулирующего блока 4 для реализации стандартного закона, блока 5 задания переменных коэффициентов, сигнализатора 6 знака производной, сигнализаторов верхнего 7 и нижнего 8 отклонений параметра за установленную зону нечувствительности и двух трехмембранных реле 9 и 10, включенных по схеме импликация.
Сигнал из входного канала Рпер подается на один из входов вычислительного блока 3, на вход сигнализатора 6 и на плюсовые входы сигнализаторов 7 и 8. Выходы задатчиков 1 и 2 (давления РцИ РВ) соединены с минусовыми входами сигнализаторов 8 и 7 и с соответствующими входами блока 3. Давление ДР с выхода блока 3 поступает на вход регулирующего блока 4, выход которого РВЫХ соединен с выходным каналом регулятора. Выход PI сигнализатора 6 соединен с плюсовой управляющей камерой реле 9 и минусовой управляющей камерой реле 10. Вторые )шравляющие камеры этих реле подключены к выходам Р2 и РЗ сигнализаторов 7 и В. Канал питания реле 10 соединен с выходом Р4 реле 9, а выход Р; реле 10 - с управляющим входом блока 5, связанного с регулирующим блоком 4.
Регулятор работает следующим образом.
Сигнал PS изменяется в зависимости от комбинации сигналов PI , РЗ и Р4, а сигнал Р4 зависит от сигналов PI и Р2.
Сигнализатор 6 формирует PI О при возрастании сигнала Рпер. и остановке его при значениях и формирует сигнал при падении сигнш1а Рпер и остановке его при значениях Рпер РнТогда при удалении регулируемого параметра от верхней или нижней границы зоны нечувствительности и остановке параметра за пределами зоны нечувствительности , на вход регулирующего блока 4 поступает давление АР и изменяется регулирующее воздействие РВЫХПри движении регулируемого параметра к зоне нечувствительности срабатывает блок 5 и изменяются настроечные коэффициенты регулирующего блока.
При вхождении регулируемого параметра в пределы зоны нечувствительности сигнал ЛР становится равным нулю, и выходной сигнал регулятора стабилизируется на текущем значении.
При этом сигнал PS сохраняет единичное значение, что необходимо, например, для обеспечения стабилизации выходного сигнала интегрального звена.
Технико-экономический эффект от внедрения изобретения заключается в упрощении конструкции пневматических регуляторов переменной структуры, так как в предложенном регуляторе использовано меньше трехмембранных реле и усилителей мощности.
Формула изобретения
Пневматический регулятор переменной структуры, содержащий вычислительный блок, входы которого подключены к входному каналу и выходам первого и второго задатчиков, соединенных с первыми входами сигнализаторов верхнего и нижнего отклонений параметра, вторые входы которьгх подключены к входному каналу, выход вычислительного блока соединен с входом регулирующего блока, другие входы которого подключены к выходам блока задания переменных коэффициентов, и сигнализатор знака производной, соединенный с входным каналом, отличающийся тем, что, с целью упрощения регулятора, в нем установлены два трехмембранных реле, включенные по схеме импликация ; причем выход сигнализатора знака производной соединен с плюсовой управляю. щей камерой первого трехмембранного реле и минусовой управляющей камерой второго трехмембранного реле; вторые управляющие камеры реле подключены к выходам сигнализаторов верхнего и нижнего отклонений; канал питания второго
r реле подключен к выходу первого реле, а выход второго реле - к управляющему каналу блока задания переменных коэффициентов.
Источники информации, принятые во внимание при экспертизе изобретения:
5 зоны нечувствительности, сб. Пневматические средства и система управления, Наука, М., 1970г.,стр. 187-192;
