Изобретение относится к автоматике, вычислительной и измерительной технике и может использоваться для создания измерительных, информацион- ных и управляющих систем, в частности в робототехнике в системах рас- познавания образов.
Це,пью изобретения является повышение точности определения коорди- нат геометрического центра световых пятен с размером, большим одного элемента разрешения.
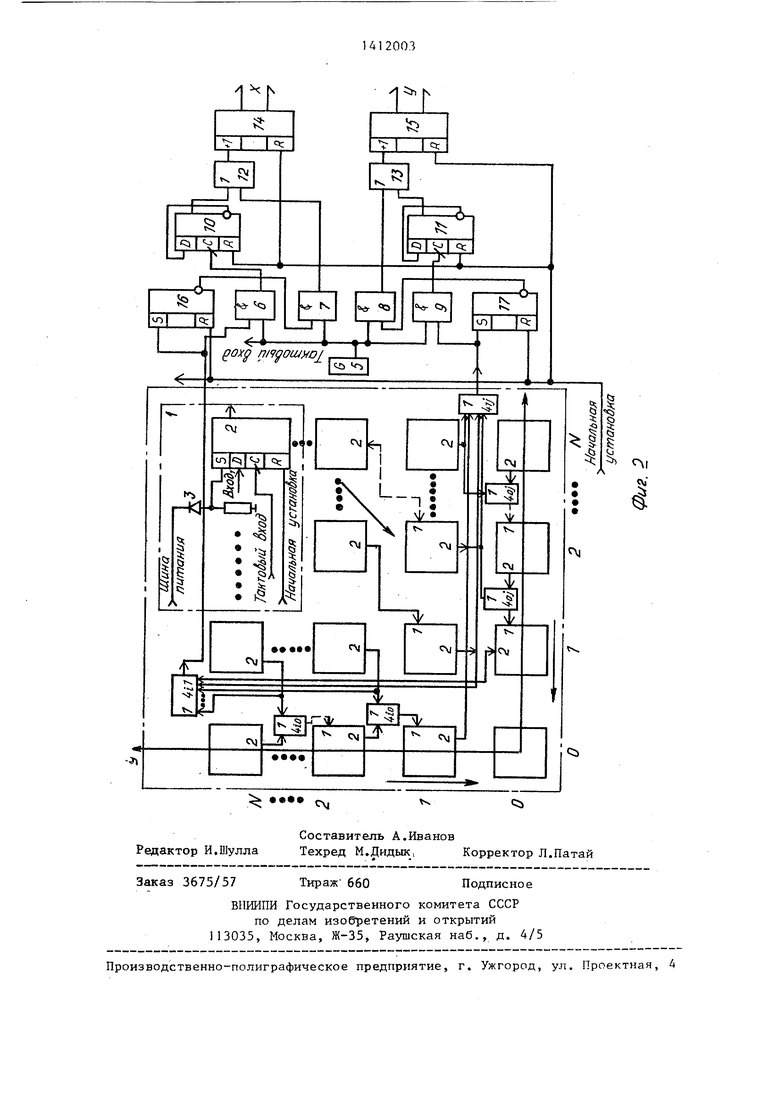
На фиг, приведена схема, поясняющая способ измерения координат гео- метрического центра светового пятна; на фиг.2 структурная электрическая схема устройства, реализующего способ определения декартовых координат геометрического центра светового пят- на.
Сущность изобретения заключается в проецировании светового излучения от объекта на фоточувствительную мат рицу элементов преобразования светового сигнала в электрический сигнал, параллельном сдвиге совокупностей полученных электрических сигналов по углом 45° к осям декартовой системы координат, за исключением крайнего левого столбца и нижней строки, для которых сдвиг электрических сигналов производят вдоль оси координат к началу координат. При таком сдвиге электрических сигналов, соответствующих исходному изображению, или другими словами при сдвиге изображения под углом 45 относительно осей координат, в какой-то момент времени изображение достигает своим нижним элементом оси ОХ, а левым элементом .оси ОУ соответственно. Возможен случай, когда эти моменты времени совпадают. Поскольку изображение смеща- ется под углом 45 к осям координат, моменты времени касания осей координат определяют расстояние или координату до крайнего элемента изображения по другой оси. При таком смеще- НИИ элементов изображения все элементы фоточувствительной матрицы элементов за исключением крайнего левого столбца и нижней строки принимают со. стояние верхнего справа элемента от рассматриваемого, а элементы нижней строки и левого столбца переходят в состояние, зависящее от состояния двух элементов, правого и правого
сверху для нижней строки, верхнего и верхнего справа для крайнего левог о столбца. Если хотя бы один из двух соседних элементов находится в воз- бужд,енном состоянии, то соответствующий элемент первого столбца и нижней Строки также переходит в возбужденное состояние. Такой специфический сдвиг изображения позволяет при его смещении не потерять информацию о геометрических размерах поля изображения. При этом в конечном итоге все изображение по мере смещения деформируется и все элементы со временем переходят в невозбужденное состояние.
Предлагаемый способ заключается в следующем. На фоточувствительную матрицу элементов проецируется изображение фигуры, для которой необходимо определить координаты геометрического центра в плоскости фоточувствительной матрицы элементов. Пусть изображение имеет форму (фиг.1а).При этом в активном состоянии (логическая единица) находятся ячейки фотоприемной матрицы, отмеченные звездочкой, остальные погашены (в состоянии логического нуля). Исходное изображение имеет координаты геометрического центра , . С началом развертки идет сдвиг изображения к началу координат под углом 45° к осям декартовой системы координат. Стрелкой показана последовательность сдвига изображения светового пятна. Как видно в каждом такте делается шаг одновременно по координатам X и Y. В данном, случае через, три такта достигаются нижняя.строка и.крайний слева столбец фоточувствительной матрицы элементов, т.е. в третьем такте пересекаются оси ОХ и OY (фиг.1Ь). Таким образом, в данном случае оси ОХ и OY пересекаются по истечении времени ЗТ от начала сдвига, где Т - период следования тактовых импульсов, причем длительность ЗТ одно- значно соответствует расстоянию крайних левого и нижнего элементов изображения пятна до осей ОХ и OY. Эти расстояния равняются трем пространственным дискретам. После подачи двух последуюЕсих тактовых импульсов в активном состоянии после каждого такта оказываются элементы, показанные соответственно на фиг. 15 и t. Во второй снизу строке хотя бы один возбужденный элемент находится на протяжении трех тактов, что соответствует вертикальному размеру поля изображения. Поэтому, фиксируя с помощью схе мы ИЛИ для сигналов с элементов второй снизу строки наличие.хотя бы одного элемента в строке и количество тактов такого события, можно определить максимальный вертикальный раз- мер изображения, выбор второй снизу строки определяется отсутствием в таком случае пропуска сигналов изображения.
Аналогично возбужденные элементы или хотя бы один из них находятся во втором слева столбце на протяжении следующих семи тактов с второго по восьмой (ФИГ.15-Х.), что однозначно соответствует максимальному размеру горизонтального поля изображения. Поэтому, фиксируя с помощью схемы ИЛИ для сигналов с элементов второго слева столбца наличие хотя бы одного элемента в столбце и количество так- тов такого события, можно определить максимальный горизонтальный размер изображения. Выбор второго слева столбца определяется отсутствием в таком случае пропуска сигналов изоб- ражения.
Координату Y геометрического центра можно определить по расстоянию до нижнего элемента изображения, выраженному в целом числе дискретов плюс половина вертикального размера поля изображения, так как вертикальный размер изображения, определяемьй расстоянием между центрами самого нижнего и самого верхнего элементов, связан с числом строк принадлежащих изображению соотношением
гь - (1)
где п - число строк, принадлежапщх
изображению;
г. - вертикальный размер изображения .
Аналогичным образом можно найти координату X геометрического центра изображения, зная его максимальный горизонтальный размер. Искомые координаты Хц и Уц равны
Х„
YH.,
ХА.Э
(2)
п -1 . 2
Sx-ll- и, л.э 2
Координаты Уц g и Хд однозначно . оответствуют моментам времени дости- с ю1520 25 ЗО
чдО
45
50
. 55
жения элементами изображения соответствующих осей координат и равны трем. Значения п и п однозначно соответствуют времени пребывания в возбужденном состоянии хотя бы одного элемента второй снизу строки и второго слева столбца. Значения и однозначно соответствуют промежутку времени между моментом достижения изображением соответствующей оси и моментом перехода в невозбужденное состояние всех элементов второй снизу строки и второго слева столбца при их обратном переходе с возбужденного состояния. В нашем случае эти времена соответственно равны
tg 5Т - ЗТ 2Т; tr 9Т - ЗТ 6Т.
Количество тактовых импульсов, соответствующих данным временным интервалам, равны в этом случае числу возбужденных строк и столбцов, принадлежащих изображению, уменьшенным на единицу (1), г 2; г 6. Фиксируя таким образом количество счетных импульсов или временные интервалы, определяют искомые координаты по формулам (2) 4, Хи 6.
Таким образом, координату геометрического центра изображения по горизонтальной оси определяют по суммарной длительности временного интервала от начала развертки до момента пересечения сигналом развертки крайнего левого элемента изображения и половине длительности временного интервала, соответствующего максимальному размеру изображения, или по количеству тактовых импульсов, содержащихся в данном интервале временив
Способ может быть реализован на любом устройстве, построенном на базе фоточувствительной матрицы элементов с самосканированием. Это может быть матрица приборов с зарядовой связью (ПЗС), матричная структура светодиод-фйтодиод и другие. Для примера показана реализация способа с использованием двумерного регистра сдвига (ДРС).
Устройство содержит квадратную фоточувствительную матрицу 1 элементов, состоящую из N строк и N столбцов фоточувствительных ячеек 2, включающих фотодиоды 3 и D-триггеры с соответ- ствзтощими связями, которые осуществляют прием, хранение и передачу ик
формации, N-2 элементов ИЛИ 4 и N-2 элементов ИЛИ 4oj ; элементы ИЛИ 4у и 4(j , тактовый генератор 5, элементы И 6-9, делители 10 и 11 час- тоты, элементы ИЛИ 12 и 13, счетчики 14 и 15 координат, триггеры 16 и 17 управления.
Выход тактового генератора 5 соединен со всеми тактовыми входами D- триггеров ячеек 2. Выходы D-тригге- ров поля фотоприемной матрицы соединены следующим образом. Выходы всех ij-x триггеров, где i - номер строки; j - номер столбца поля фотоприемной матрицы, кроме крайнего левого столбца и нижней строки, соединены с входами (i-lj триггеров. Для крайнего слева столбца выходы триггера с номером (1,0) и триггера с номером (1,1) объединены посредством элемента ИЛИ 4, д и подаются на вход триггера с номером (i-1, О). Для нижней строки выходы триггеров с номерами (0,j) и (l,j) объединяются посредст- вон элемента ИЛИ 4 о,- и подаются на вход триггера с номером (0,j-l), Кроме того, выходы всех D-триггеров второго слева столбца соединены с входами схемы ИЛИ 4,- , а все выходы вто- ,ррй снизу строки D-триггеров соединены с входами элемента ИЛИ 4, j . Выход тактового генератора 5 соединен также с первыми входами элементов схем И 6-9. Выходы элементов И 6 и 8 через делители 10 и 11 частоты соответственно соединены с вторыми входами элементов ИЛИ 12 и 13. Выходы элементов ИЛИ 12 и 13 соединены с суммирующими входами счетчиков 14 и 15 координат соответственно. Кроме того, второй вход элемента И 6 соединен с ,выходом элемента ИЛИ 4,- , а второй вход элемента И 9 - с выходом элемента ИЛИ 4,- . Эти же выходы элементов ИЛИ 4. и 4 соединены с входами триггеров 16 и 17 управления соответственно. Выход триггера 16 управлени . соединен с вторым входом элемента И 7, а триггера 17 управления .- с вто- рым входом элемента И 8, Входы установки в нуль всех D-триггеров, триггеров 16 и 17 управления делителей Ш и 11 частоты и счетчиков 14 и 15 координат соединены с шиной Началь- ная установка. I
Устройство для реализации способа определения декартовых координат геометрического центра светового пятна работает следующим образом.
Сигналом Начальная установка все элементы сбрасываются в исходное нулевое состояние. Световое излучени проецируется в виде пятна на поверхность фотоприемной матрицы 1. Освещенная фоточувствителъная матрица элментов переводит соответствующие D-триггеры в возбужденное состояние (логическая единица), остальные D- триггеры остаются в нулевом состоянии. С началом работы тактового генератора 5 изображение начинает сдвигаться к началу координат в направлении, указанном стрелкой под углом 45 к осям декартовой системы координат. Одновременно тактовые импульсы суммируются в счетчиках 14 и 15 координат. С достижением изображения второго слева столбца или второй снизу строки фоточувствительной матрицы элементов на выходах элементов ИЛИ или 4 появляется логическая единица, которая открывает элементы И 6 или 8, а триггеры 16 или 17 равления перебрасывает в единичное состояние и закрьшает элементы И 7 или 9 соответственно. Со следующего такта в счетчиках координат начинают суммироваться импульсы в режиме через один до тех пор, пока элементы ИЛИ 4{ или 4,1 находятся в возбужденном состоянии. С выводом пятна из поля фоточувствительной матрицы элементов элементы ИЛИ 4; и 4,- переходят в состояние логического нуля счет прекращается, а в счетчиках 14 и 15 координат остаются.записанные координаты геометрического центра, .
спроецированного в плоскость фотопри-. емной матрицы светового пятна.
В случае необходимости измерения производят циклически. Для этого выделяют строб окончания счета и используют его как сигнал Начальная установка. В результате цикл измерения повторяется автоматически.
Формула изобретения
Способ определения декартовых координат геометрического центра светового пятна, заключающийся в про ецировании светового пятна на фото- чувствительную матрицу элементов
Э,-. (,1,2,.,,,N; ,l,2N)
и преобразования светового сигнала
А,. I
в исходную совокупность бинарных электрических сигналов A,.j , имеющих два уровня:
и если световой сигнал воз- действует на фоточувствительный элемент и по интенсивности превышает пороговое значение, если интенсивность свето-
вого сигнала меньше или ,в равна пороговому значению или он не воздействует на фоточувствительный элемент запоминании этой исходной совокупное ти электрических сигналов, формировании тактовых импульсов развертки изображения, смещении изображения в диагональном направлении путем формирования новых совокупностей элек- трических сигналов таким образом, чтобы р-я совокупность формировалась из (р-1)-й по правилу
и°
р-1 A,-+,,jt для всех i,
.р-«
(.-;,) V(A,,,5t,)wiH j(l,2,..
(A;:;,J) v(,,)дляi .
(1,2,...N),
где p (1,2,...);
V - логическое сложение бинарных сигналов,
отличающийся тем, что, с целью повьщ1ения точности определения
ю
, j5 20
25
)
930
координат геометрического центра световых пятен с размером, большим одного элемента разрешения, для р-й совокупности сигналов формируют дополнительно первый и второй объединяющий сигналы пересечения изображения с нулевым столбцом и нулевой строкой в соответствии с выражениями
N
N
.Р
35
о; .v А. . ; о; у А.;
И и ,1 измеряют временные интервалы Т, и Tj движения границ изображения до нулевого столбца и нулевой строки матрицы фотоэлементов путем подсчета числа тактовых импульсов от начала развертки до момента появления соответственно первого и второго объединяющих сигналов с единичньм логическим уровнем и прибавления единицы к каждому результату подсчета, измеряют временные интервалы Т« и Т, равные времени прохождения изображением расстояний, равных соответственно го- ризонтальному и вертикальному размерам изображения, путем счета числа тактовых импульсов за время существования соответственно первого и второго объединяющих сигналов с единичным уровнем, определяют горизонтальную X и вертикальную Y координаты геометрического центра светового пятна соответственно по формулам X Т, + Tj/2;
Y Т + Т4/2.
Ж Ж Ж Ж1
у ж ж 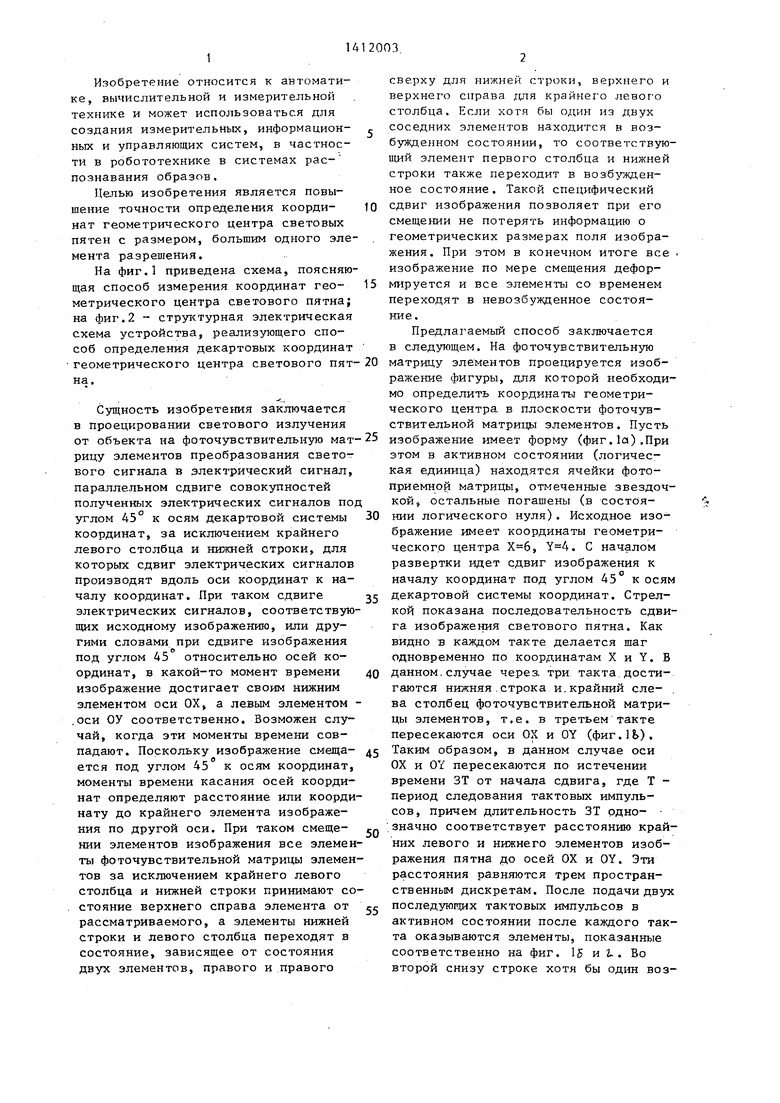
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания изображений | 1986 |
|
SU1429142A1 |
| Устройство для определения координат центра изображения | 1980 |
|
SU991452A1 |
| Устройство для считывания изображений | 1987 |
|
SU1524074A1 |
| Оптико-электронное устройство для обработки оптической информации | 1981 |
|
SU972531A1 |
| Устройство для контроля качества телевизионного изображения | 1989 |
|
SU1778914A1 |
| Буферное запоминающее устройство | 1990 |
|
SU1833918A1 |
| Способ определения эффективной фоточувствительной площади всех фоточувствительных элементов, входящих в состав инфракрасного фоточувствительного модуля с режимом временной задержки и накопления | 2024 |
|
RU2837719C1 |
| Установка для определения эффективной фоточувствительной площади всех фоточувствительных элементов, входящих в состав инфракрасного фоточувствительного модуля с режимом временной задержки и накопления | 2024 |
|
RU2838484C1 |
| Устройство для обработки и считывания изображений | 1989 |
|
SU1661809A1 |
| Оптикоэлектронный координатор для автоматического вождения мобильных агрегатов | 1986 |
|
SU1378086A1 |
Изобретение относится к автома-:. тике, вычислительной и измерительной технике. Цель изобретения -.повышение точности определения светового пятна. Сущность данного способа заключается ;в проецировании светолзогб изхгучения lot объекта на фоточувствительную мйт- рйцу эл-тов преобразования светового сигнала в электрический сигнал и в параллельном сдвиге.совокупностей по- лзгченных электрическнх сигналов под углом 45 к осям декартовой системы координат, за исключением крайнего левого столбца и нижней строки, для которых сдвиг электрических сигналов производят вдоль оси координат к началу координат. Такой специ4а1ческий сдвиг изображения позволяет при его смацении не потерять информац оо о геометрических размерах поля изображения. В итоге все изображения по мере смещения будут деформироваться и все 3л-ты со временем пе- рейдзгг в невозбувденное состояние. Способ повышает точность определения координат.геометрического центра световых Пятен размером, большим одного эл-та разрешения. 2 ил. (Л
Фи&.7
rr
rr
| Авторское свидетельство СССР 1254893, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
