Изобретение относится к автоматике и кибернетике и может быть использовано в системах поиска и наведения, в читающих автоматах и опознавателях образов, в следящих системах, в устройствах контроля и управления технологическими процессами.
Известно устройство определения координат светящегося объекта, формирующего отсчеты по ХипоУ, по двум оптическим каналам за счет регистрации изображения на двух независимых фоточувствительных матрицах. Выделение координат светящегося объекта производится при помощи механической смены транспарантов, за счет формирования электронных транспарантов моделированием чувствительности специального фотослоя (маскона) с последующим интегрированием фотопотока на усилителях и формированием значений в коде Грея 1 .
Однако электронное устройство подобного типа отличается высокой сложностью в связи с необходимостью формирования функций Радемахера различной степени дл;я управления электронным транспарантом и узкими функциональными возможностями, так кгис позволяет определить координаты толь
ко одиночного светящегося объекта. Координаты нескольких светящихся точек, пятен, больших замкнутых
5 объектов изображения, контурных изображений и др. не могут быть определены координатоуказателем подобного типа.
Наи1более близким техническим шением к изобретению является устройство нахождения центра пятна, входящее в следящую лазерную систему и состоящее из светоделительного блока, содержащего трубку с зеркалом и линзу, вращающегося зеркала, дви15гателя, пороговых усилителей, фотоприемного блока в виде фотоматрицы 5x5, соединенной с матрицей 5x5 видеоусилителей , детекторов строк и
20 колонок, пороговыхусилителей строк и колонок, счетчика строк и колонок запоминсшлцих устройств строк и колонок, дуплексного ключа, коммутатора, генератора центра, запоминающих устройств, контрольного устройства,
25 регистра и блока управления С23.
Однако это устройство сложно по конструкции, так как необходим специальный двигатель, который должен вращать зеркало. Вращающееся зерка30
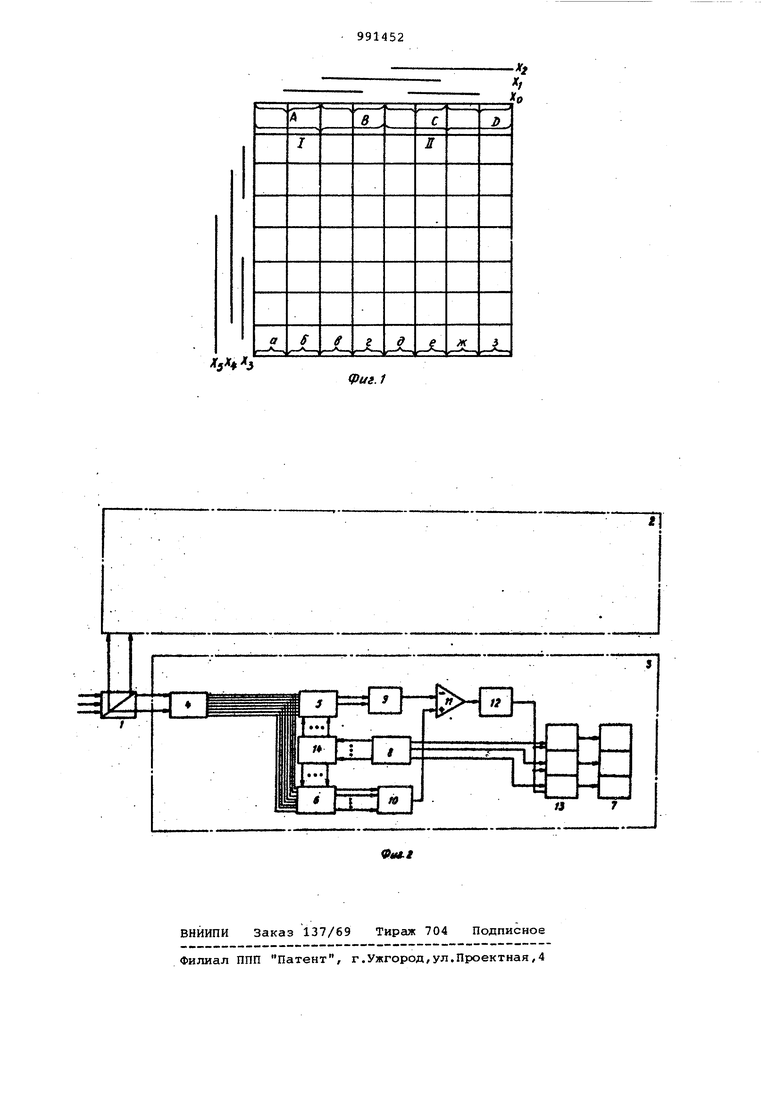
ло устанавливается под определенным углом, так как диаметр светящейся точки должен составлять ширину одно го детекторного элемента. Требуются специальное запоминающее устройство начало отсчета (D), запоминающее ус ройство для подсчета числа пульсаций слева (L), запоминающее устройс во для подсчета числа пульсаций спр ва (R) и арифметическое устройство, которое дает адрес информации D+R-L Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что в устройстве для определения координат центра изображений, содержащем светоделительный блок, два идентичных канала определения координат,содержащих фотоприемный блок в виде фотоматрицы, оптически связанной со светоделительным блоко и соединенной с коммутаторами, регистр и блок управления, в каждый из каналов определения координат введены аналоговые сумматоры, блок вычитания, несимметричный триггер, элементы И, дешифратор-, выходы кото рого подключены к входам коммутатора, а входы к выходам блока управле ния, соединенного с одним из входов элементов И, другие входы которых соединены с выходом несимметричного триггера, а выходы - с входами регистра, входы аналоговых сумматоров соединены с выходами коммутаторов, а выходы - с входами блока вычитания, соединенного с входом несиммет ричного триггера. На фиг. 1 изобра кено кодирование фотоматрицы 8x8 симметричным кодом Грея; на фиг. 2 - блок-схема устрой ства для определения координат цент ра изображений. I, II - зоны симметрии вертикаль ной оси третьего ранга; A,B,C,D зоны симметрии вертикальной оси вто рого ранга; а, б, в, г, д, е, ж, з зоны симметрии вертикальной оси пер вого ранга. В зависимости от размерности мат рицы число зон будет различным. Утол щенные линии слева и сверху матрицы представляют единичные значения соо ветствующих переменных Хд, х, « f С Устройство содержит светоделитель ный блок 1 в виде кубической призмы два идентичных канала 2-3 определения координат, содержащих каждый фотоприемный блок 4 в виде фотоматрицы, оптически связанной со светоделительным блоком 1 и соединенной с коммутаторами 5-6, регистр 7, блок 8 управления, аналоговые сумматоры 9-10, блок 11 вычитания, несимметрич ный триггер 12, элементы И 13, дешифратор 14, входы которого подключены к входам коммутаторов 5-6, а входы к выходам блока 8 управления, соединенного с одним из входов элементов И 13, другие входы которых соединены с выходом несимметричного триггера 12, а выходы - с входами регистра 7. Входы аналоговых сумматоров 9-10 соединены с выходами коммутаторов 5-6, а их выходы - с входами блока 11 вычитания, соединенного с входом несимметричного триггера 12. Устройство работает следующим образом. Номера строк и столбцов матрицы кодируются симметричным кодом Грея. Так, например, элемент, отмеченный точкой на фотоматрице(фиг. 1) соответствует комбинации XQ, Х Х„ Хд 4 Xj. Координаты строк и столбцов будем определять отдельно, используя два идентичных канала 2-3 определения координат, для чего применен, светоделительный блок 1, выполненный в виде кубической призмы, которая разделяет под углом 90° световые лучи, поступающие от изображения. Одни световые лучи освещают фотоматрицу строк, другие - фотоматрицу столбцов. Далее процесс определения координат центра изображения будет одинаков для двух фо- томатриц, поэтому рассмотрено функционирование устройства при определении одной координаты строк. Фотоматрица 4 преобразует световой сигнал в электрический. В зависимости от освещения матрицы сигналы на ее выходах будут различными. Принцип работы заключается в поочередном сравнении сигналов с зон симметрии вертикальной оси m ранга до зон симметрии вертикальной оси первого ранга. Выходы фотоматрицы запараллелены на два коммутатора 5 и 6. По первому сигналу из блока 8 управления дешифратор 14 открывает определенные ключи коммутаторов 5 и 6 таким образом, чтобы сравнивались сигналы с зон симметрии вертикальной оси m ранга. При этом сигналы с выхода сравниваемых зон симметрии поступают на аналоговые сумматоры 9 и .-10 соответственно. В сумматорах электрические сигналы суммируются, при этом выходные сигналы на сумматорах 9 и 10 будут различными, так как освещенность фотоматрицы в зонах будет разной. Выходной сигнгш из сумматора- 9 подается на - вход блока 11 вычитания, а выходной сигнал из сумматора 10 на его + вход. Блок 11 вычитания формирует разностный сигнал, который поступает на вход несимметричного триггера 12. Причем, если сигнал, поступающий на + вход блока 11 вычитания больше сигнала, поступающего на его - вход, то блок формирует разостный сигнал, уровень которого ольше уровня порогового напряжения есимметричного триггера 12. При том триггер 12 переходит в состояние 1. Если сигнал, поступающий а - вход блока 11 вычитания болье сигнала, поступающего на его + вход, то блок 11 вычитания формирут разностный сигнал, уровень котоого меньше порогового напряжения несимметричного триггера, и триггер 12 остается в состоянии О. По сигналу записи блока 8 управления в m азряд регистра 7 памяти через схему И запишется 1, если на выходе несимметричного триггера установлена 1, и запишется О, если триггер находится в состоянии О.
При рассмотрении двух зон m ранга (на фиг. 1 это зоны I и II) видно, что переменная Х,„ (для фиг.1 это Xg) по коду Грея для левой m зоны принимает значение О, а для правой зоны симметрии m ранга . Выходы фотоматрицы 4 должны подключаться дешифратором 14 к сумматорам таким образом, чтобы единичные значения переменных ,/ ..., XQ, кодирующих пространство фотоматрицы каждой рассматриваемой зоны, подключались к второму сумматору 10, а их-нулевые значения -i к первому сумматору 9. В этом случае для любой зоны при выходном сигнале, поступающем на + вход блока вычитания/ большем сигнала на его - входе, триггер 12 будет переходить в единичное состояние, что соответствует единичным значениям переменных Xff,--t/ ./ XQ, и соответственно при выходном сигнале, поступающем на + вход блока вычитания, меньшем сигнала на его - входе, триггер 12 будет находиться в состоянии О, что соответствует нулевым значениям переменных Х , ../
ХоПо второму такту блок 8 управления выдает такую команду, которая в зависимости от состояния триггера. 12 настраивает дешифратор 14 таким образом, чтобы открылись ключи коммутаторов 5 и 6, подключающие фотоматрицы 4 с той m-l зоны, которая имеет больший выходной сигнал, а следовательно, и большую освещенность. Таким образом, в каждый . разряд регистра 7 будут записываться значения переменных от m ранга до 1 ранга, что определит координату строк. Координаты столбцов полу-, чим в аналогичном регистре памяти второго канала определение координат 2. Координаты X и У в соответстВУЮ1ЦИХ регистрах фиксируются в двоичном коде.
Устройство может работать с матрицами произвольной размерности квадратичными NxN или прямоугольны чи Nxp, например 16x16, 32x32, , 1-024x1024 и др., имеющими возможность непосредственного съема cyMiviapHoro сигнала без специальных режимов коммутации со всех элементов любого из выбранных столбцов. Способы перевода кода Грея в двоичный позиционный код общеизвестны. а ряде случаев нет необходимости перевода. Поэтому в структуре предлагаемого изобретения нет дополнительных преобразователей кодов.
Таким образом, данное устройство для определения координат центра изображения по сравнению с известными значительно проще по конструкции вследствие отсутствия механической системы, арифметического устройства и трех запоглинающих устройств.
Формула изобретения
Устройство для определения координат центра изображения, содержащее
светоделительный блок, два идентичных канала определения координат, содержащих фотоприемный блок в виде фотоматрицы, оптически связанной со светоделительным блоком и соединенной с коммутаторами, регистр и блок управления, отличающееся тем, что, с целью упрощения устройства, в каждый из каналов определения координат аналоговые сумматоры, блок вычитания, неснмметричный триггер, элементы И, дешифратор, выходфл которого подключены к входам коммутаторов, а входы к выходам блока управления, соединенного с одними из входов элементов
и, другие входы которых соединены с выходом несимметричного триггера, а выходы .- с входами регистра, входы аналоговых сумматоров соединены с выходами коммутаторов, а выходы - с
входами блока вычитания, соединенного с входом несимметричного триггера.
Источники информации, принятые во внимание при экспертизе
1 Берковская К.Ф. и др. Координатоуказатель одиночного светящегося объекта. Сб. Оптическая обработка информации. Л., Наука, .1978, с. 127-135.
Z. Патент Великобритании
1426745, кл. Н 4 I). опублик.1976 (прототип).
-л
/ Jo
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра яркости следа дефекта детали | 1985 |
|
SU1280506A1 |
| Устройство для отображения графической информации | 1986 |
|
SU1310797A1 |
| Устройство для определения координат центра изображения | 1986 |
|
SU1427395A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1292020A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| Устройство для контроля планарных структур | 1984 |
|
SU1167620A1 |
| Устройство для настройки валков сортопрокатной клети | 1986 |
|
SU1331599A1 |
| Голографическое постоянное запоминающее устройство | 1990 |
|
SU1725258A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Дифференцирующе-сглаживающее устройство | 1975 |
|
SU610115A1 |
Г,
Pus.1
1
п
