ьо
05 СО
Изобретение относится к сельскохозяйст- Ьенному машиностроению, в частности к автоматизированным выгрузным устройствам | орнеклубнеуборочных машин. I Цель изобретения - уменьшение потерь повреждений корнеклубнеплодов. На чертеже изображена блок-схема уст- рокства.
Устройство состоит из датчика 1 рас- |:тояния, представляющего собой допплеров- :кий СВЧ-локатор ближнего действия с авто- аинным построением, с приемоизлучаюш,им элементом, выполненным на базе диода Ган- ча, электронного блока 2 управления, предназначенного для обработки сигналов и вы- эаботки соответствующих управляющих :игналов по заложенному алгоритму функ- дионирования, электрогидрораспределителя для управления гидроцилиндра 4 вертикального привода выгрузного транспортера, механизма автоматического управления движением транспортерной ленты, содержащего зторой электродораспределитель 5 и гидро- цвигатель 6 привода ленты выгрузного гранспортера и противоаварийных датчиков 7. Выходы датчика 1 расстояния и про- гивоаварийных датчиков 7 соединены с соответствующими входами электронного бло- а 2 управления, а выходы его подключены 1к электрогидрораспределителям 3 и 5, управ- 1ЯЮЩИХ соответственно исполнительным идроцилиндром 4 и гидродвигателем 6,
I Устройство работает следующим образом Датчик 1 расстояния измеряет расстояние между выгрузным транспортером и кузовом транспортного средства. Информация о расстоянии поступает в электронный блок 2 управления, где сравнивается с заданным значением. В начале цикла загрузки транспортер находится в крайнем верхнем поло- :жении и измеренное расстояние больше заданного, в этом случае электронный блок 2 ;выдает управляюи1ий сигнал для воздействия через электрогидрораспределитель 3 и гидроцилиндр 4 на выгрузной транспортер машины. При равенстве действительного и заданного расстояний транспортер готов к выгрузке. В процессе выгрузки ворох корнеклубнеплодов в кузове транспортного средства уве;1ичивается, расстояние между транспортером и ворохом уменьшается.
Имея автодинные построения СЕЧ датчик 1 расстояния работает в приемопередающем режиме и постоянно измеряет расстояние. При фактическом расстоянии, меньшем заданного, электронный блок 2 управления вырабатывает управляющий сигнал для поднятия транспортера. Таким образом, транспортер отслеживает высоту падения корнеклубнеплодов в заданных пределах. В предаварийных ситуациях щуп противоаварийных датчиков 7 касается борта или кабины транспортного средства. Электронный блок 2 управления вырабатывает управляющий сигнал для ускоренного подъема транспортера в крайнее верхнее положение и одновременно срабатывает механизм ав5 томатического управления движением транспортной ленты: командой из электронного блока 2 управления с помощью электрогидрораспределителя 5 выключается привод гидродвигателя 6, транспортерная лента выгрузного транспортера останавливается. Вы0 грузка корнеклубнеплодов прекращается. После ликвидации предаварийной ситуации процесс выгрузки продолжается до полного заполнения кузова транспортного средства.
25
Формула изобретения
Устройство автоматического регулирования положения выгрузного транспортера корнеклубнеуборочной машины, содержа- пдее датчик расстояния, противоаварийные
датчики, первый электрогидрораспределитель, исполнительный гидроцилиндр и электронный блок управления, отличающееся тем, что, с целью уменьшения потерь и повреждений корнеклубнеплодов, оно снабжено механизмом автоматического управления движением транспортной ленты с вторым электрогидрораспределителем и гидродвигателем привода, при этом входы электронного блока управления соединены соответственно с датчиком расстояния и проти- воаварийными датчиками, а выходы - первый с исполнительным гидроцилиндром через первый электрогидрораспределитель, второй - с гидродвигателем привода через второй электрогидрораспределитель, причем датчик расстояния выполнен в виде допплеровского СВЧ-локатора с автодинным построением.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ЗАГРУЗКИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019940C1 |
| Устройство управления высотой выгрузного транспортера уборочной машины | 1990 |
|
SU1752251A1 |
| Устройство автоматического управления многосекционным транспортером сельскохозяйственной машины | 1990 |
|
SU1727589A1 |
| Устройство для отделения почвенных примесей от корнеклубнеплодов удлиненной формы | 1989 |
|
SU1618320A1 |
| Линия для послеуборочной обработки, предпосадочной и товарной подготовки корнеклубнеплодов и луковиц | 2019 |
|
RU2708166C1 |
| Линия для послеуборочной обработки, предпосадочной и товарной подготовки корнеклубнеплодов и луковиц | 2016 |
|
RU2630449C1 |
| Устройство для отделения корнеклубнеплодов от примесей | 1987 |
|
SU1424756A1 |
| СПОСОБ ОТДЕЛЕНИЯ КОРНЕКЛУБНЕПЛОДОВ УДЛИНЕННОЙ ФОРМЫ ОТ КОМКОВ ЗЕМЛИ И КАМНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2012185C1 |
| Подъемно-выгрузной элеватор корнеклубнеуборочных машин | 1983 |
|
SU1166710A1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ЛУКА И КОРНЕКЛУБНЕПЛОДОВ УДЛИНЕННОЙ ФОРМЫ ОТ ПОЧВЕННЫХ ПРИМЕСЕЙ | 2003 |
|
RU2258348C2 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - уменьшение потерь и повреждений корнеклубнеплодов. Устройство содержит датчик 1 расстояния, выполненный в виде СВЧ-локатора ближнего действия с авто- динным построением. Датчик 1 расстояния и противоаварийные датчики 7 соединены с соответствующими входами электронного блока управления (ЭБУ) 2. Первый выход ЭБУ 2 соединен через первый электрогид- рораспределитель 3 с гидроцилиндром 4 вертикального привода выгрузного транспортера, второй выход - через второй элект- рогидрораспределитель 5 с гидродвигателем 6 привода ленты выгрузного транспортера. Информация о расстоянии выгрузного конца транспортера поступает в ЭБУ 2. По этим сигналам устанавливается высота выгрузного конца выгрузного транспортера относительно вороха корнеклубнеплодов. Противоаварийные датчики 7 срабатывают в крайних положениях выгрузного конца выгрузного транспортера относительно стенок кузова и кабины. 1 ил. (О (Л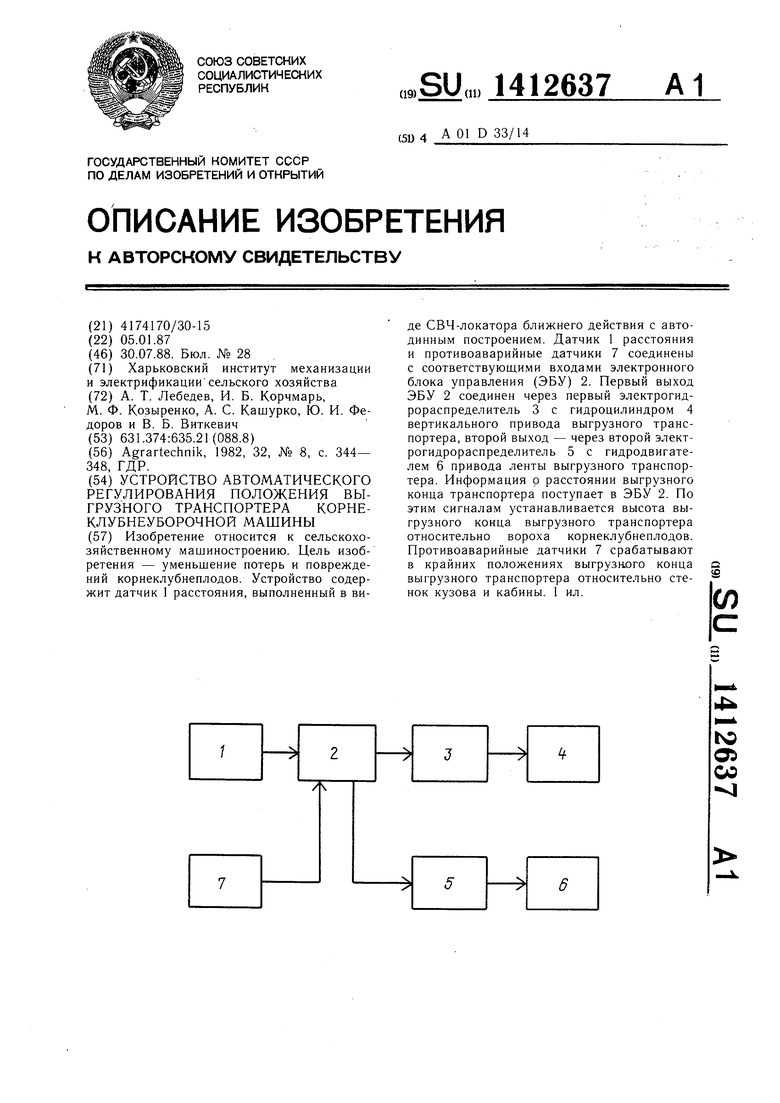
| Agrartechnik, 1982, 32, № 8, с | |||
| Способ получения жидкой протравы для основных красителей | 1923 |
|
SU344A1 |
