Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматизации процесса перегрузки сельскохозяйственной продукции с уборочной машины в кузов транспортного средства.
Известна автоматическая система регулирования высоты падения клубней картофеля ("Agrartechnik", т. 32, N 8, 1982 г, с. 344-347), состоящая из датчика расстояния, электронного блока управления, электрогидравлической исполнительной системы, боковых датчиков безопасности, расположенных по обе стороны выгрузной части концевой секции транспортера. Причем датчик, расположенный со стороны кабины, имеет подпружиненный чувствительный элемент, имеющий форму замкнутой трапеции и выполненный упругим. Датчик, расположенный с другой стороны выгрузной части транспортера, имеет два подпружиненных чувствительных элемента разной длины и установленных под различными углами к транспортеру. При касании чувствительных элементов датчиков безопасности о борт или кабину транспортного средства выгрузной транспортер с помощью специального подъемника переводится на безопасную высоту.
Недостатком этого устройства является отсутствие информации о нарушении синхронности движения уборочного комплекса для маневра транспортного средства, а также защита только концевой части односекционного транспортера, а остальная часть транспортера по всей его длине не защищена. Кроме того, большинство уборочных сельскохозяйственных машин для достижения минимальной высоты выгрузки имеет двухсекционный транспортер, обе секции которого должны иметь аварийную защиту.
Известно устройство автоматического регулирования положения загрузочного транспортера корнеуборочной машины, состоящее из электронного блока управления, датчика расстояния, электрогидравлической исполнительной системы. Это устройство автоматически осуществляет управление концевой секцией загрузочного транспортера, выдерживая заданную высоту выгрузки. При касании щупа противоаварийных датчиков о борт или кабину транспортного средства происходит ускоренный подъем загрузочного транспортера в крайнее верхнее положение и одновременно остановка транспортерной ленты.
Недостатком этого устройства является отсутствие синхронности движения и недостаточная аварийная защита. Так как представленная схема предназначена для регулировки одной секции транспортера, следовательно, главная секция транспортера нерегулируема и на ней отсутствует аварийная защита по всей длине секции, где также с большой вероятностью возможны столкновения с боковым бортом транспортного средства.
Наиболее близким техническим решением к предлагаемому изобретению является устройство управления транспортером, состоящее из датчика расстояния, электронного блока управления, электрогидравлической исполнительный системы, двух боковых датчиков безопасности. Датчики расположены по обе стороны выгрузной части концевой секции транспортера. Это устройство автоматически осуществляет управление двумя секциями транспортера, выдерживая заданную высоту выгрузки. При касании диода бокового датчика безопасности о борт транспортного средства происходит одновременное поднятие главной и концевой секций транспортера до прекращения касания транспортера с бортом.
Недостатком этого устройства является отсутствие защиты концевой и главной секций транспортера снизу по всей его длине, отсутствие информации о нарушении синхронности движения уборочного комплекса, так как боковые датчики при срабатывании выдают только сигнал о касании борта транспортного средства, при этом не давая команды для маневрирования транспортного средства.
Цель изобретения - повышение эксплуатационной надежности устройства.
Поставленная цель достигается тем, что устройство автоматического управления процессом загрузки кузова транспортного средства, содержащее загрузочный транспортер, включающий главную и концевую секции, на конце последней из которых установлен датчик расстояния, выходом подключенный к первому входу электронного блока управления, первый и второй выходы которого связаны с входами управления электрогидравлической исполнительной системы, включающий управляемые гидроцилиндры главной и концевой секций загрузочного транспортера, дополнительно снабжено датчиками переднего, заднего и боковых ближнего и дальнего бортов кузова транспортного средства, датчиками безопасности главной секции загрузочного транспортера и блоком звуковой и световой сигнализации, вход которого соединен с третьим выходом электронного блока управления, а соответствующие входы последнего подключены к выходам датчиков бортов транспортного средства и датчиков безопасности главной секции загрузочного транспортера, при этом датчики ближнего бокового борта кузова транспортного средства и безопасности главной секции загрузочного транспортера размещены по обе стороны соответственно концевой и главной секции загрузочного транспортера в нижней их части, а датчики дальнего бокового, переднего и заднего бортов кузова транспортного средства установлены на концевой секции загрузочного транспортера в его выгрузной части. Причем блок световой и звуковой сигнализации снабжен элементом регулирования частоты, спектрального состава и длительности звуковых сигналов.
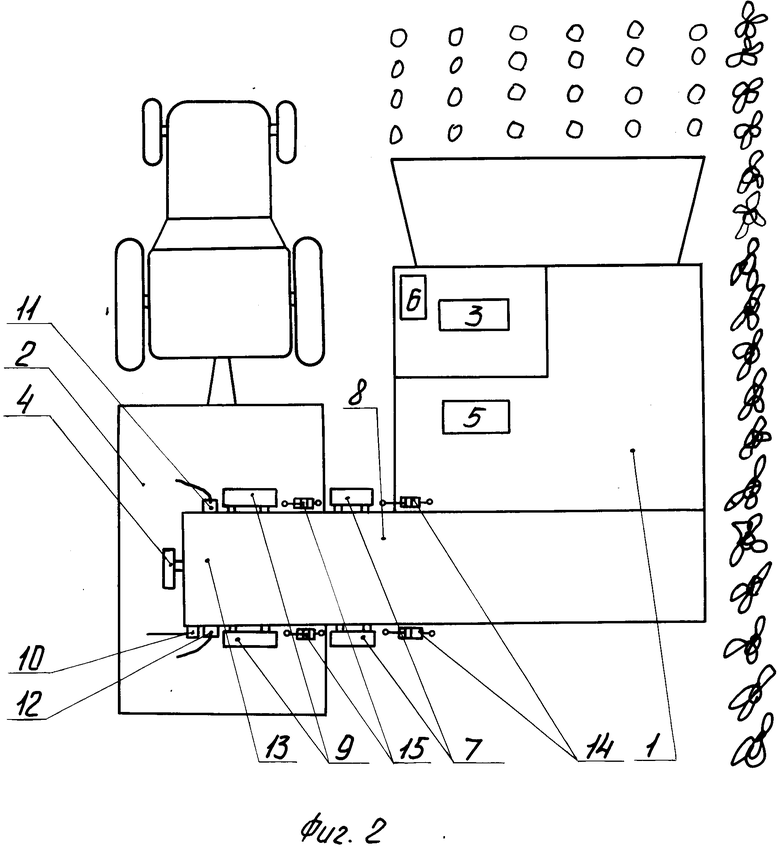
На фиг. 1 показан уборочный комплекс, вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 - блок-схема устройства.
Устройство автоматического управления процессом загрузки сельскохозяйственной продукции с сельскохозяйственной уборочной машины 1 (фиг. 1, фиг. 2) в кузов транспортного средства 2 содержит электронный блок 3 управления, датчик 4 расстояния, электрогидравлическую исполнительную систему 5, блок 6 световой и звуковой сигнализации, датчики 7 безопасности главной секции транспортера, датчики 9 бокового ближнего борта, датчик 10 бокового дальнего борта, датчик 11 переднего борта, датчики 12 заднего борта кузова транспортного средства 2, установленные на концевой секции 13 транспортера, гидроцилиндры 14, 15, соответственно главной и концевой секций 8, 13 транспортера.
Блок 6 световой и звуковой сигнализации установлен на сельскохозяйственной машине 1, в передней ее части, со стороны транспортного средства 2 так, чтобы при движении уборочного комплекса вдоль рядков убираемой продукции водитель транспортного средства 2, слегка повернув голову вправо, мог наблюдать за световой индикацией блока 6 сигнализации. Датчики 7 безопасности установлены по обе стороны главной секции 8 транспортера. Датчики 9 бокового ближнего борта установлены по обе стороны концевой секции 13 транспортера. Датчики 10, 11, 12 бокового дальнего, переднего и заднего бортов установлены на концевой секции 13 транспортера в выгрузной ее части, причем датчик 11 переднего борта расположен со стороны кабины уборочной машины 1, датчик 12 заднего борта - с другой стороны транспортера. Датчик 10 бокового дальнего борта расположен так, чтобы чувствительный элемент датчика выходил за пределы выгрузки сельскохозяйственной продукции и при этом не мешал процессу выгрузки. Датчик 4 расстояния, датчики 11, 12, 10, 9 переднего, заднего, боковых дальнего и ближнего бортов, а также датчики 7 безопасности (фиг. 3) своими выходами соединены с входом электронного блока 3 управления, выход электронного блока 3 управления соединен с входом блока 6 световой и звуковой сигнализации. Выходы электронного блока 3 управления соединены со входами электрогидравлической исполнительной системы 5, которая своими выходами соединена с исполнительными механизмами-гидроцилиндами 14, 15 соответственно главной и концевой секций 8, 13 транспортера.
Электронный блок 3 управления представляет собой универсальный автомат, работающий по жесткой логике, анализируя информацию с датчика 4 расстояния, датчиков 7, 9, 10, 11, 12 безопасности, боковых ближнего и дальнего, переднего и заднего бортов кузова транспортного средства 2, вырабатывает управляющее воздействие, которое поступает в электрогидравлическую исполнительную систему 5, а также выдает в блок 8 световой и звуковой сигнализации сигналы, соответствующие управляющему воздействию.
Датчик 4 расстояния выполнен в виде инфракрасного локатора. Датчики 7 безопасности, датчики 9, 10, 11, 12 боковых ближнего и дальнего, переднего, заднего бортов представляют собой тактильные датчики.
Устройство работает следующим образом.
Транспортное средство 2 заезжает под загрузочный транспортер сельскохозяйственной машины 1, который находится в крайнем верхнем положении. Участники уборочного комплекса начинают двигаться параллельным курсом. Механизатор сельскохозяйственной уборочной машины 1 включает автоматический режим работы устройства автоматического управления процессом загрузки. Датчик 4 расстояния измеряет высоту выгрузки корнеклубнеплодов. Так как фактическая высота выгрузка в начальный момент больше заданной, секции 8, 13 транспортера опускаются в пустой кузов транспортного средства 2 до тех пор, пока фактическая высота выгрузки не будет равна заданной высоте. В таком положении транспортера при нарушении синхронности движения уборочного комплекса, а также при колебаниях машины 1 в вертикальной и горизонтальной плоскостях под действием неровностей рельефа поля, возможны соприкосновения секций 8 или 13 транспортера с бортами или кабиной транспортного средства 2. При рассогласовании скоростей различных элементов уборочного комплекса возможно касание одного из поперечных бортов транспортного средства 2 с датчиками 11, 12 переднего или заднего бортов. При касании чувствительного элемента одного из датчиков 11, 12 переднего или заднего борта о кабину или поперечные борта транспортного средства 2 происходит замыкание контакта соответствующего датчика, сигнал с датчика поступает в электронный блок 3 управления, в котором вырабатывается управляющий сигнал, воздействующий на электрогидравлическую исполнительную систему 5 и реализующийся посредством гидроцилиндров 14 и 15 в виде одновременного подъема секций 8 и 13 транспортера на безопасную высоту. Одновременно сигнал с электронного блока 3 управления поступает в блок 6 звуковой и световой сигнализации, при этом на нем высвечивается световая индикация "Увеличить скорость" или "Уменьшить скорость", сопровождающаяся звуковым сигналом определенного спектрального состава и длительности и соответствующим определенной команде. Водитель транспортного средства 2, услышав или увидев на блоке 6 сигнализации световую индикацию команды, выполняет ее. При этом технологический процесс выгрузки не прекращается и загрузочный транспортер сельскохозяйственной машины 1 займет промежуточное положение относительно поперечных бортов транспортного средства 2, синхронность движения элементов уборочного комплекса восстанавливается.
При рассогласовании синхронности движения участников уборочного комплекса в поперечном направлении возможны столкновения секций 8, 13 транспортера с продольными бортами транспортного средства 2. При касании чувствительного элемента одного из датчиков 10, 9 боковых дальнего или ближнего бортов о борт транспортного средства 2 срабатывает соответствующий датчик. Сигнал с датчика поступает в электронный блок 3 управления, где вырабатывается управляющий сигнал, воздействующий на электрогидравлическую систему 5 и реализующийся в виде подъема соответствующей секции 8 или 13 транспортера на безопасную высоту. Одновременно сигнал с электронного блока 3 управления поступает в блок 6 звуковой и световой сигнализации. При этом на нем высвечивается световая сигнализация "Поворот влево" или "Поворот вправо", сопровождающаяся звуковым сигналом определенного спектрального состава и длительности его звучания и соответствующим определенной команде. Водитель транспортного средства 2 выполняет соответствующий маневр, в результате чего движение элементов уборочного комплекса в поперечной плоскости стабилизируется. При касании чувствительного элемента датчика 7 безопасности главной секции 8 транспортера о борт транспортного средства 2 датчик срабатывает. Сигнал с датчика 7 поступает в электронный блок 3 управления, обрабатывается в нем, воздействует на электрогидравлическую систему 5 и реализуется посредством гидроцилиндров 14 в виде подъема главной секции 8 транспортера на безопасную высоту, после чего система продолжает работать в следящем режиме выгрузки. При заполнении кузова транспортного средства 2 корнеклубнеплодами механизатор сельскохозяйственной уборочной машины 1 выключает автоматический режим работы устройства. Транспортное средство 2 уезжает, а уборочная машина 1 продолжает технологический процесс уборки, при этом корнеплоды накапливаются в бункере машины. При подъезде других транспортных средств 2 под загрузочный транспортер сельскохозяйственной машины 1 технологический процесс погрузки повторяется.
Кроме автоматического режима работы, устройство имеет приоритетный ручной режим работы, позволяющий механизатору осуществлять корректировку процесса выгрузки.
Наличие устройства автоматического управления процессом загрузки кузова транспортного средства на уборочной сельскохозяйственной машине обеспечивает снижение потерь сельскохозяйственной продукции и обеспечение безопасности процесса выгрузки за счет синхронности движения уборочного комплекса, а также обеспечивает надежную защиту секций транспортера при работе сельскохозяйственной машины в автоматическом режиме, освобождает механизатора от необходимости постоянно контролировать перемещение загрузочного транспортера в вертикальной плоскости, а также от ручной корректировки управлением транспортера, улучшает эргономические показатели и позволяет механизатору больше внимания уделять непосредственному управлению энергонасыщенной машиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления многосекционным транспортером сельскохозяйственной машины | 1990 |
|
SU1727589A1 |
| Устройство автоматического регулирования положения выгрузного транспортера корнеклубнеуборочной машины | 1987 |
|
SU1412637A1 |
| Уборочная сельскохозяйственная машина | 1987 |
|
SU1523090A1 |
| Способ доставки урожайной массы от сельскохозяйственной уборочной машины до перерабатывающего агрегата | 1985 |
|
SU1303075A1 |
| Устройство управления высотой выгрузного транспортера уборочной машины | 1990 |
|
SU1752251A1 |
| Уборочная сельскохозяйственная машина | 1986 |
|
SU1384255A1 |
| Выгрузной элеватор корнеклубнеуборочной машины | 1982 |
|
SU1087104A1 |
| ЗАГРУЗЧИК СЕМЯН В СЕЯЛКИ | 2005 |
|
RU2283567C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПЕРЕРАБОТКИ ОТХОДОВ В КОМПОСТ | 2013 |
|
RU2557172C2 |
| САМОРАЗГРУЖАЮЩЕЕСЯ САМОХОДНОЕ ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ СРЕДСТВО НА ГУСЕНИЧНОМ ХОДУ | 2007 |
|
RU2335881C1 |


Использование: сельскохозяйственное машиностроение и может быть применено для автоматизации процесса перегрузки сельскохозяйственной продукции с уборочной машины в кузов транспортного средства. Сущность изобретения: изобретение позволяет вырабатывать информацию для синхронизации движения участников уборочного комплекса и аварийной защиты выгрузного транспорта. Для этого на секциях транспортера устанавливаются датчики переднего, заднего, дальнего, ближнего бортов кузова транспортного средства, датчики безопасности главной секции транспортера. Устройство снабжено блоком световой и звуковой сигнализации, включающим элемент регулирования частоты, спектрального состава и длительности звуковых сигналов. 1 з.п. ф-лы, 3 ил.
| Патент США N 3889796, кл.B 65C 43/00, 1975. |
