Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для управления высотой выгрузного транспортера уборочной машины при погрузке корнеклубнеплодов в транспортные средства.
Целью изобретения является расширение эксплуатационных возможностей.
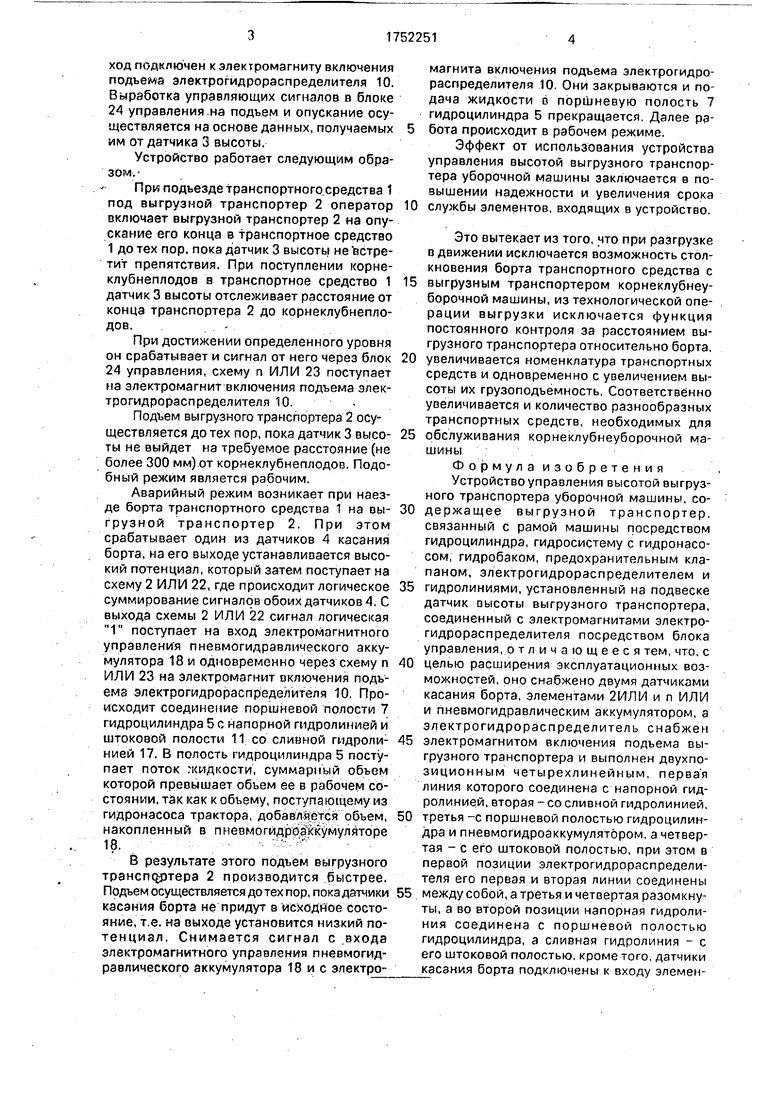
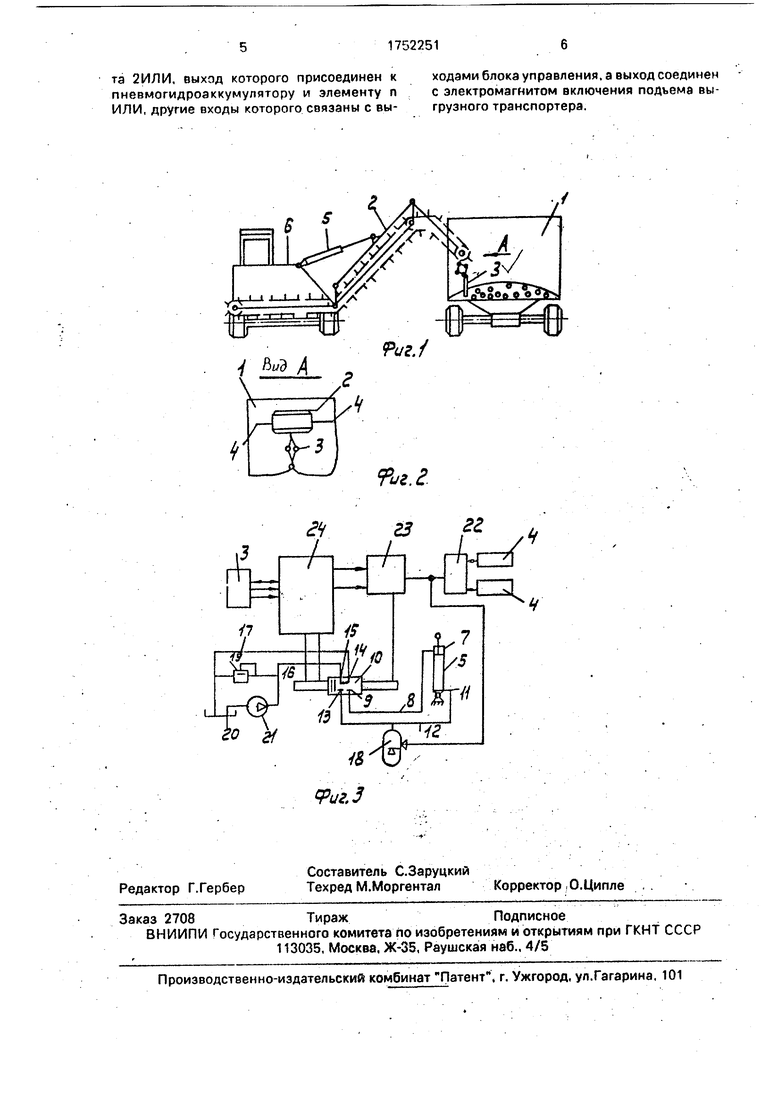
На фиг. 1 представлена схема устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема подключения датчиков касания борта и пневмогидравлического аккумулятора к блоку управления и электрогидравлической системе
Устройство содержит, установленный над транспортным средством 1, выгрузной транспортер 2 с датчиками 3 высоты и датчиками 4 касания борта. Выгрузной транспортер 2 закреплен на машине и связан
посредством гидроцилиндра 5 управления с ее рамой 6 Поршневая полость 7 гидроцилиндра 5 соединена гидрошлангом 8 с золотником 9 электрогидрораспределителя 10, штоковая полость 11 гидрошлангом 12 с золотником 13 электрогидрораспределителя 10, к его золотникам 14 и 15 подключены напорная 16 и сливная 17 гидролинии, к гидрошлангу 12 подключен пневмогидрав- лический аккумулятор 18. Предохранительный клапан 19 и маслобак 20 соединены с гидронасосом 21. Выходы датчиков 4 касания борта соединены с входами схемы 2 ИЛИ 11, Выход схемы 2 ИЛИ 22 соединен с входом управления пневмогидравлическим аккумулятором 18 и с входом схемы п ИЛИ 23, на остальные входы которой поданы выходы управления подъемом выгрузного транспортера 2 блока 24 управления, а выXI
СЛ
ю ю
СЛ
ход подключен к электромагниту включения подъема злектрогидрораспределителя 10. Выработка управляющих сигналов в блоке 24 управления на подъем и опускание осуществляется на основе данных, получаемых им от датчика 3 высоты.
Устройство работает следующим образом.При подъезде транспортного средства 1 под выгрузной транспортер 2 оператор включает выгрузной транспортер 2 на опускание его конца в транспортное средство 1 до тех пор, пока датчик 3 высоты не встретит препятствия. При поступлении корнеклубнеплодов в транспортное средство 1 датчик 3 высоты отслеживает расстояние от конца транспортера 2 до корнеклубнеплодов.
При достижении определенного уровня он срабатывает и сигнал от него через блок 24 управления, схему п ИЛИ 23 поступает на электромагнит включения подъема элек- трогидрораспределителя 10.
Подъем выгрузного транспортера 2 осуществляется до тех пор, пока датчик 3 высо- ты не выйдет на требуемое расстояние (не более 300 мм) от корнеклубнеплодов. Подобный режим является рабочим.
Аварийный режим возникает при наезде борта транспортного средства 1 на вы- грузной транспортер 2, При этом срабатывает один из датчиков 4 касания борта, на его выходе устанавливается высокий потенциал, который затем поступает на схему 2 ИЛИ 22, где происходит логическое суммирование сигналов обоих датчиков 4. С выхода схемы 2 ИЛИ 22 сигнал логическая 1 поступает на вход электромагнитного управление пневмогидравлического аккумулятора 18 и одновременно через схему п ИЛИ 23 на электромагнит включения подъема электрогидрораспределителя 10. Происходит соединение поршневой полости 7 гидроцилиндра 5 с напорной гидролинией и штоковой полости 11 со сливной гпдроли- нией 17. В полость гидроцилиндра 5 поступает поток жидкости, суммарный объем которой превышает объем ее в рабочем состоянии, так как к объему, поступающему из гидронасоса трактора, добавляется объем, накопленный в пнеомогидроаккумуляторе 18.
В результате этого подъем выгрузного транспортера 2 производится быстрее. Подъем осуществляется до тех пор, покадатчики касания борта не придут в исходное состояние, т.е. на выходе установится низкий потенциал. Снимается сигнал с входа электромагнитного управления пневмогидравлического аккумулятора 18 и с электро-
магнита включения подъема электрогидрораспределителя 10. Они закрываются и подача жидкости в поршневую полость 7 гидроцилиндра 5 прекращается. Далее работа происходит в рабочем режиме.
Эффект от использования устройства управления высотой выгрузного транспортера уборочной машины заключается в повышении надежности и увеличения срока службы элементов, входящих в устройство.
Это вытекает из того, что при разгрузке в движении исключается возможность столкновения борта транспортного средства с выгрузным транспортером корнеклубнеу- борочной машины, из технологической операции выгрузки исключается функция постоянного контроля за расстоянием выгрузного транспортера относительно борта, увеличивается номенклатура транспортных средств и одновременно с увеличением высоты их грузоподъемность. Соответственно увеличивается и количество разнообразных транспортных средств, необходимых для обслуживания корнеклубнеуборочной машины
Формула изобретения Устройство управления высотой выгрузного транспортера уборочной машины, содержащее выгрузной транспортер, связанный с рамой машины посредством гидроцилиндра, гидросистему с гидронасосом, гидробаком, предохранительным клапаном, электрогидрораспределителем и гидролиниями, установленный на подвеске датчик высоты выгрузного транспортера, соединенный с электромагнитами электрогидрораспределителя посредством блока управления, отличающееся тем, что, с целью расширения эксплуатационных возможностей, оно снабжено двумя датчиками касания борта, элементами 2ИЛИ и п ИЛИ и пневмогидравлическим аккумулятором, а электрогидрораспределитель снабжен электромагнитом включения подъема выгрузного транспортера и выполнен двухпо- зиционным четырехлинейным, первая линия которого соединена с напорной гидролинией, вторая -сосливной гидролинией, третья -с поршневой полостью гидроцилиндра и пневмогидроаккумулятором. а четвертая - с его штоковой полостью, при этом в первой позиции электрогидрораспределителя его первая и вторая линии соединены между собой, а третья и четвертая разомкнуты, а во второй позиции напорная гидролиния соединена с поршневой полостью гидроцилиндра, а сливная гидролиния - с его штоковой полостью, кроме того, датчики касания борта подключены к входу элемен
та 2ИЛИ, выход которого присоединен к ходами блока управления, а выход соединен пневмогидроаккумулятору и элементу п с электромагнитом включения подьема вы- ИЛИ, другие входы которого связаны с вы- грузного транспортера.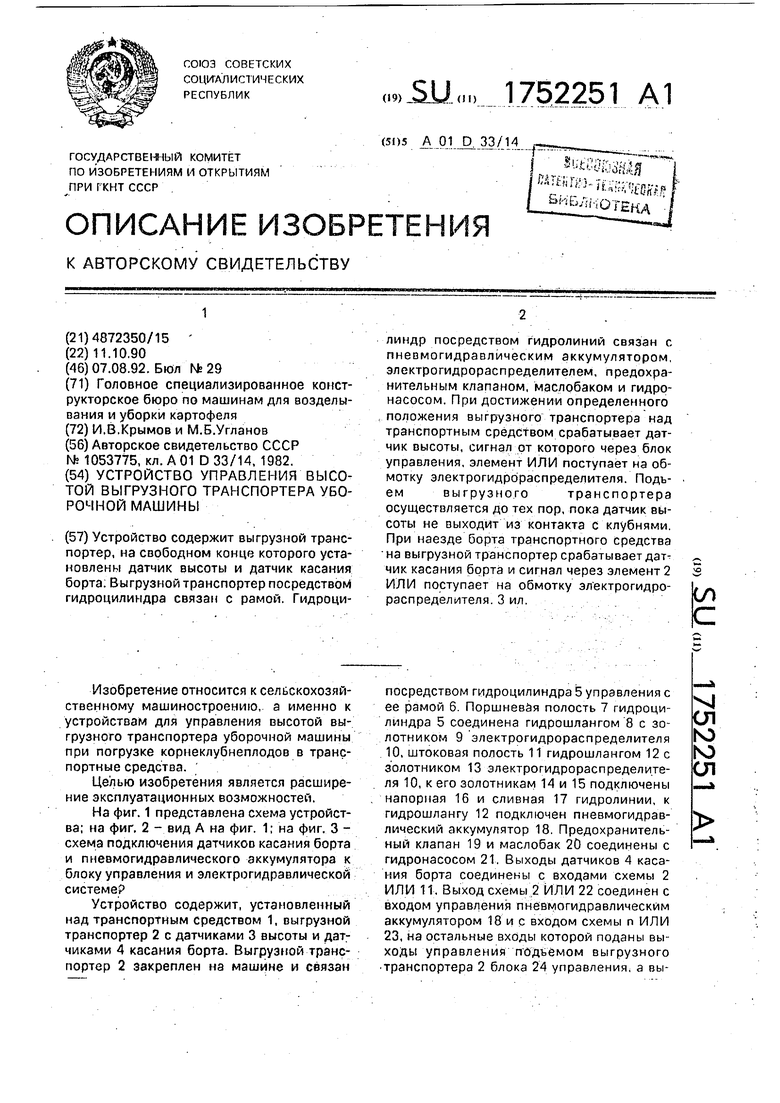
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод управления рабочим оборудованием фронтального погрузчика | 1987 |
|
SU1490235A1 |
| Устройство автоматического регулирования высоты среза | 1990 |
|
SU1797781A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
| Гидропривод погрузчика | 1982 |
|
SU1084392A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ЗАГРУЗКИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019940C1 |
| Система автоматического направления подбирающего рабочего органа на ленту льна | 1990 |
|
SU1755726A1 |
| Устройство автоматического регулирования положения выгрузного транспортера корнеклубнеуборочной машины | 1987 |
|
SU1412637A1 |
| Подвеска направляющего колеса гусеничного транспортного средства | 1990 |
|
SU1770202A1 |
| Навесная система трактора | 2023 |
|
RU2830434C1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ПЛАВНОСТИ ХОДА СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2252171C2 |
Устройство содержит выгрузной транспортер, на свободном конце которого установлены датчик высоты и датчик касания борта. Выгрузной транспортер посредством гидроцилиндра связан с рамой. Гидроцилиндр посредством гидролиний связан с пневмогидравлическим аккумулятором, электрогидрораспределителем, предохранительным клапаном, маслобаком и гидронасосом. При достижении определенного положения выгрузного транспортера над транспортным средством срабатывает датчик высоты, сигнал от которого через блок управления, элемент ИЛИ поступает на обмотку электрогидрораспределителя. Подъемвыгрузноготранспортера осуществляется до тех пор, пока датчик высоты не выходит из контакта с клубнями. При наезде борта транспортного средства на выгрузной транспортер срабатывает датчик касания борта и сигнал через элемент 2 ИЛИ поступает на обмотку электрогидрораспределителя. 3 ил. СО с
Лг.г
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
