1
4 Is5 Ч
давления и Д 10 производительности, связанные с турбамеханизмом 2. При поступлении сигнала на Б 22 происходит закрытие НА, при этом входной сигнал регулятора уменьшается. В результате этого напряжение, поступающее на вход преобразователя, увеличивается, а следовательно, увеличивается скорость вращения электродвигателя. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВУХСКОРОСТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ДУТЬЕВОГО ВЕНТИЛЯТОРА | 2015 |
|
RU2577515C1 |
| Устройство для питания волокном группы чесальных машин | 1985 |
|
SU1366560A1 |
| УСТРОЙСТВО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2396692C1 |
| Система регулирования производительности турбомеханизма | 1987 |
|
SU1521996A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076449C1 |
| Устройство управления режимом работы вентиляторной установки | 1986 |
|
SU1413248A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ПРИВОД ШАХТНОЙ ВЕНТИЛЯЦИОННОЙ УСТАНОВКИ | 2016 |
|
RU2714890C2 |
| БОРТОВОЕ ЗАРЯДНОЕ УСТРОЙСТВО | 2012 |
|
RU2518914C1 |
| Устройство для управления трамвайной стрелкой | 2024 |
|
RU2841574C1 |
Изобретение касается управления центробежными установками, оборудованными электроприводом, и м.б. использовано в системах управления режимами работы турбомеханизма, в частности шахтных вентиляторов, турбокомпрессоров с направляющим аппаратом или дроссельной заслонкой. Цель изобретения - повьшение точности путем определения оптимального значения скорости электропривода для перехода на аэродинамическое регулирование производительности вентиляторной установки. Устр-во содержит блок (Б) 18 вычисления угла установки направляющего аппарата (НА) 3, Б 19, 28 вычисления мощности сети, запоминающие Б 20, 21, Б 22 управления НА и исполнительный механизм НА, Б 24 питания, датчик (Д) 25 скорости, Д 26 угла установки НА, Б 27 вычисления скорости, Б 29 сравнения,нелинейные Б 8 и 30, релейные элементы 11, 31 с двумя нормально замкнутыми и двумя разомкнутыми блок-контактами 14, 15, 32, 33 и 16, 17, 34, 35, Б 12 и 36 j вьщержки времени, регулятор 37 производительности, Д 5 мощности сети, Б 7 задания производительности, преобразователь 6 частоты с системой управления, связанный с электроприво- 2 дом, коммутирующее устр-во 13, Д 9 (Л
1
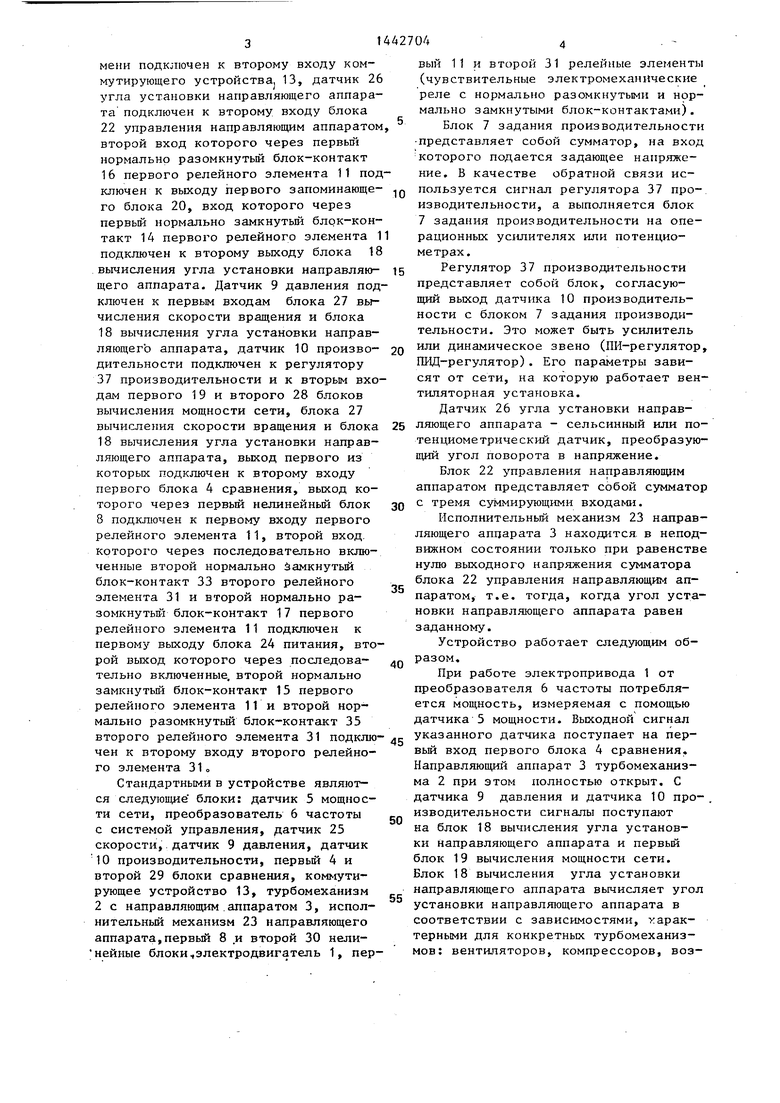
Изобретение относится к области управления и регулирования центробежных установок, оборудованных электроприводом, и может быть использовано в системах управления режимами padoTbi турбомеханизма, в частности, шахтных вентиляторов, турбоко рес- соров с направляющим аппаратом или дроссельной заслонкой.
Цель изобретения - повышение точности путем определения оптимального значения скорости электропривода для перекода на аэродинамическое регулирование производительности вентиляторной установки.
На чертеже представлена структурная схема устройства.
Устройство для управления электроприводом 1 турбомеханизма 2 с направляющим аппаратом 3 вентиляторной установки содержит первьй блок 4 сранения, последовательно соединенные датчик 5 мощности сети и преобразователь 6 частоты с системой управления, по выходу связанный с электроприводом 1, блок 7 задания производительности, первый нелинейньй бло 8, датчик 9 давления и датчик 10 производительности, связанные с турбоме ханизмом 2, и последовательно соединенные первый релейньй элемент 11, первый блок 12 выдержки времени и коммутирующее устройство 13, первьй и второй выходы которого подключены соответственно к входу и выходу преобразователя 6 частоты с системой управления.
Первьй релейньй элемент 11 вьшол- нен с двумя нормально замкнутыми 14 и 15 и двумя нормально разомкнутыми 16 и 17 блок-контактами, а устройство, кроме того, содержит последовательно соединенные блок 18. вычисления угла установки направляющего аппарата и первый блок 19 вычисления
мощности сети, первьй 20 и второй 21 запоминающие блоки, последовательно соединенные блок 22 управления направляющим аппаратом и исполнитель- ньй механизм 23 направляющего аппарата, связанньй с направляющим аппаратом 3, блок 24 питания, датчик 25 скорости, связанный с электроприводом 1, датчик 26 угла установки на
правляющего аппарата, связаиньй с
направляющим аппаратом 3, последовательно соединенные блок 27 вычисления скорости вращения, второй блок 28 вычисления мощности сети, второй блок
29 сравнения, второй нелинейньй блок 30, второй релейньй элемент 31 с двуя нормально замкнутыми 32 и 33 и вумя нормально разомкнутыми 34 и 35 блок-контактами, второй блок 36 выержки времени и регулятор 37 производительности, связанный с блоком 7 задания производительности.
Датчик 5 мощности сети подключен к первому и второму входам соответственно первого 4 и второго 29 блоков сравнения, второй вход первого из которых подключен к выходу первого блока 19 вычисления мощности сети, первьй и второй выходы блока 7 задания производительности подключены к первому и второму входам соответственно блока 22 управления направляющим аппаратом и преобразователя 6 частоты с системой управления, третий вход которого подключен к датчику 25 скорости, а четвертьй - через первьй нормально разомкнутьй блок- контакт 34 второго релейного элемента 31 к выходу второго запоминаю-
щего блока 21, вход которого через первьй нормально замкнутьй блок-контакт 32 второго релейного элемента 31 подключен к второму выходу блока 27 вычисления скорости вращения. Вы5СОД второго блока 36 пьщержки
меяи подключен к второму входу коммутирующего устройства, 13, датчик 26 угла установки направляющего аппарата подключен к второму входу блока 22 управления направляющим аппаратом второй вход которого через первьп нормально разомкнутьй блок-контакт 16 первого релейного элемента 11 подключен к выходу первого запоминающего блока 20, вход которого через первьй нормально замкнутьй блок-контакт 14 первого релейного элемента подключен к второму выходу блока 18 вычисления угла установки направляю- щего аппарата. Датчик 9 давления подключен к первым входам блока 27 вычисления скорости вращения и блока 18 вычисления угла установки направляющего аппарата, датчик 10 производительности подключен к регулятору 37 производительности и к вторым входам первого 19 и второго 28 блоков вычисления мощности сети, блока 27 вычисления скорости вращения и блока 18 вычисления угла установки направляющего аппарата, выход первого из которых подключен к второму входу первого блока 4 сравнения, выход которого через первый нелинейньй блок 8 подключен к первому входу первого релейного элемента 11, второй вход, которого через последовательно включенные второй нормально йамкнутьй блок-контакт 33 второго релейного элемента 31 и второй нормально разомкнутьй блок-контакт 17 первого релейного элемента 11 подключен к первому выходу блока 24 питания, второй выход которого через последовательно включенные, второй нормально замкнутьй блок-контакт 15 первого релейного элемента 11 и второй нормально разомкнутьй блок-контакт 35 второго релейного элемента 31 подключен к второму входу второго релейного элемента 31
Стандартными в устройстве являются следуюпще блоки: датчик 5 мощности сети, преобразователь 6 частоты с системой управления, датчик 25 скорости, датчик 9 давления, датчик 10 производительности, первьй 4 и второй 29 блоки сравнения, коммутирующее устройство 13, турбомеханизм 2 с направляющим.аппаратом 3, испол- нительньй механизм 23 направляющего
аппарата,первьй 8 и второй 30 нели- терными для конкретных турбомеха нейные блоки,электродвигатель 1, пер- мов: вентиляторов, компрессоров,
При работе электропривода 1 о преобразователя 6 частоты потреб ется мощность, измеряемая с помо датчика 5 мощности. Выходной сиг указанного датчика поступает на вьй вход первого блока 4 сравнен Направляющий аппарат 3 турбомеха ма 2 при этом полностью открыт. датчика 9 давления и датчика 10 изводительности сигналы поступаю на блок 18 вычисления угла устан ки направляющего аппарата и перв блок 19 вычисления мощности сети Блок 18 вычисления угла установ направляющего аппарата вычисляет установки направляющего аппарата соответствии с зависимостями, ка терными для конкретных турбомеха
10
0
25
is
30
35
0
5
0
5
терными для конкретных турбомеха мов: вентиляторов, компрессоров,
вый 11 и второй 31 релейные элементы (чувствительные электромеханические реле с нормально разомкнутыми и нормально замкнутыми блок-контактами).
Блок 7 задания производительности -представляет собой сумматор, на вход которого подается задающее напряжение. В качестве обратной связи используется сигнал регулятора 37 производительности, а выполняется блок 7 задания производительности на операционных усилителях или потенциометрах.
Регулятор 37 производительности представляет собой блок, согласующий выход датчика 10 производительности с блоком 7 задания производительности. Это может быть усилитель или динамическое звено (ПИ-регулятор, Ш-Щ-регулятор). Его параметры зависят от сети, на которую работает вентиляторная установка.
Датчик 26 угла установки направ- л.яющего аппарата - сельсинный или по- тенциометрический датчик, преобразующий угол поворота в напряжение.
Блок 22 управления направляющим аппаратом представляет собой сумматор с тремя суммирующими входами.
Исполнительньй механизм 23 направляющего аппарата 3 находится в неподвижном состоянии только при равенстве нулю выходного напр.яжения сумматора блока 22 управления направляющим аппаратом, т.е. тогда, когда угол установки направляющего аппарата равен заданному.
Устройство работает следующим образом.
При работе электропривода 1 от преобразователя 6 частоты потребляется мощность, измеряемая с помощью датчика 5 мощности. Выходной сигнал указанного датчика поступает на первьй вход первого блока 4 сравнения. Направляющий аппарат 3 турбомеханиз- ма 2 при этом полностью открыт. С датчика 9 давления и датчика 10 про- . изводительности сигналы поступают на блок 18 вычисления угла установки направляющего аппарата и первьй блок 19 вычисления мощности сети. Блок 18 вычисления угла установки направляющего аппарата вычисляет угол установки направляющего аппарата в соответствии с зависимостями, карак- терными для конкретных турбомеханизвоздуходувок. Зависимости для углов установки направляющего аппарата и.пи дроссельной заслонки определяются путем аппроксимации соответствуюпуос напорных характеристик. Они имеют общие математические формулы, хотя коэффициенты, входящие в них, зависят от мощности, типа турбомеханизма и т.д.
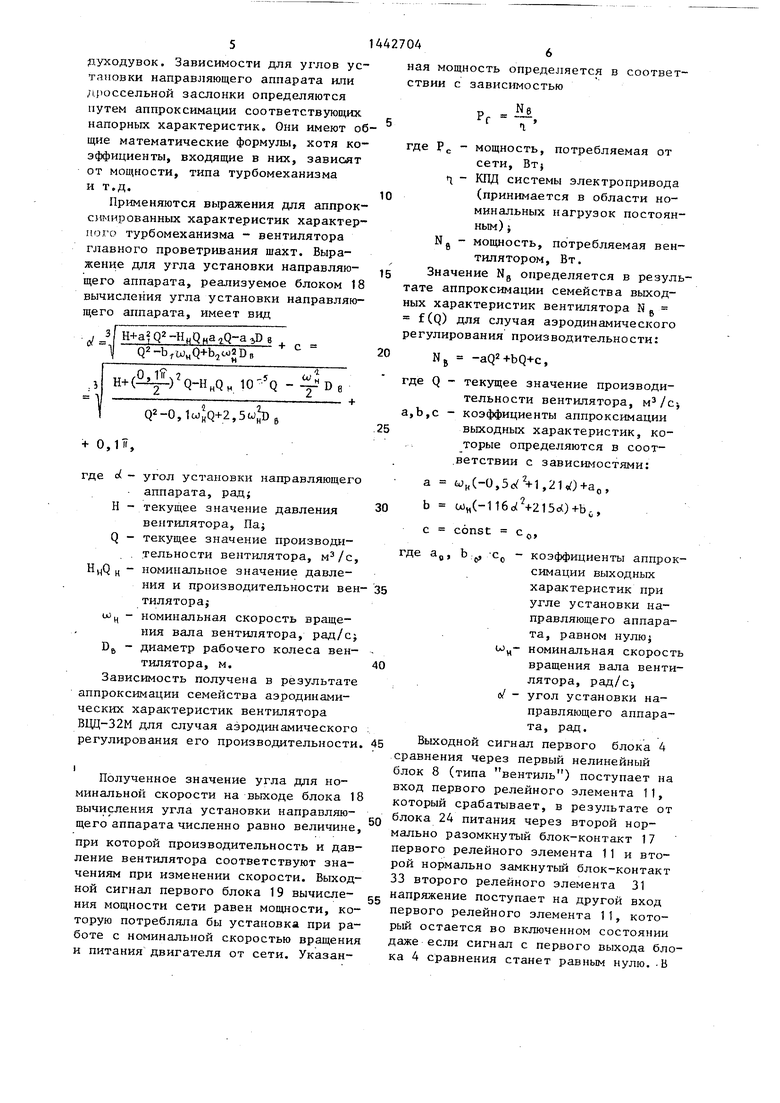
Применяются вьфажения для аппроксимированных характеристик характерного турбомеханизма - вентилятора главного проветривания шахт. Выражение для угла установки направляющего аппарата, реализуемое блоком 18 вычисления угла установки направляющего аппарата, имеет вид
; J/H+a QZ-HHQHa Q-a Ds ,U)HQ+b,co2D,
.
H+(i4i), 10- Q
w,
DB
Q2-0,1cojQ+2,5w
+ 0,1if,
де о( - угол установки направляющего
аппарата, рад; Н - текущее значение давления 30
вентилятора, Па Q - текущее значение производительности вентилятора, , Нцр ц - номинальное значение давления и производительности вен- 35 тилятора
и) - номинальная скорость вращения вала вентилятора, рад/cj Df. - диаметр рабочего колеса вен- 40
тилятора, M.
Зависимость получена в результате аппроксимации семейства аэродинамических характеристик вентилятора ВЦЦ-32М для случая аэродинамического регулирования его производительности.
1
Полученное значение угла для номинальной скорости на блока 18 вычисления угла установки направляющего аппарата численно равно величине,
при которой производительность и давление вентилятора соответствуют значениям при изменении скорости. Выходной сигнал первого блока 19 вычисления мощности сети равен мощности, которую потребляла бы установка при работе с номинальной скоростью вращения и питания двигателя от сети. Указан
ная мощность определяется в соответствии с зависимостью
с ,
где PC мощность, потребляемая от
сети, Вт}
t| - КПД системы электропривода (принимается в области номинальных нагрузок постоянным) i
Ng - мощность, потребляемая вентилятором, Вт.
Значение Ng определяется в результате аппроксимации семейства выходных характеристик вентилятора N g f(Q) для случая аэродинамического регулирования производительности:
20
N
В
-aQ2 +bQ+c,
где Q - текущее значение производительности вентилятора,
a,b,c - коэффициенты аппроксимации выходных характеристик, которые определяются в соот- .ветствии с зависимостями:
0
5
о
а ыД-0,,2Ы)+а b w«(-116o(-f215o()+b., с const Сд, b
где а.
С„ коэффициенты аппроксимации выходных характеристик при угле установки направляющего аппарата, равном нулю; w,- номинальная скорость 0вращения вала вентилятора, рад/cj с/ - угол установки направляющего аппарата, рад.
5 Выходной сигнал первого блока 4 сравнения через первый нелинейный блок 8 (типа вентиль) поступает на вход первого релейного элемента 11, который срабатывает, в результате от Q блока 24 питания через второй нормально разомкнутый блок-контакт 17 первого релейного элемента 11 и второй нормально замкнутый блок-контакт 33 второго релейного элемента 31 g напряжение поступает на другой вход первого релейного элемента 11, который остается во включенном состоянии даже если сигнал с первого выхода блока 4 сравнения станет равным нулю.-В
прЬцессе работы через первый нормально замкнутый блок-контакт 14 первого релейного элемента 11 сигнал с выхода блока 18 вычисления угла установ-
ки направляю це1 о аппарата поступает
на вход первого запоминающего блока 20. С выхода первого релейного элемента 11 сигнал поступает на вход первого блока 12 выдержки времени. В результате сигнал поступает на третий вход блока 22 управления направляющим аппаратом, после чего направ- ляюгций аппарат 3 турбомеханизма 2 постепенно закрывается, а выходной сигнал регулятора 37 производительности уменьшается.
Уменьшение сигнала приводит к тому, что напряжение, поступающее на вход преобразователя 6 частоты с сие- темой управления с выхода блока 7 задания производительности, увеличивается, следовательно, увеличивается скорость вращения электродвигателя 1.
Увеличение скорости происходит до тех 25 путем аппроксимации семейства аэро
пор, пока суммарное напряжение на входе блока 22 управления направляющим аппаратом не станет равным нулю. Это равенство наступает в результате того, что угол поворота направляющего аппарата 3 стал равным расчетному его значению, а скорость вращения вала турбомеханизма 2 стала соответствовать его номинальной скорости. К окончанию этого процесса первый блок 12 выдержки времени подает сигнал на ком мутиругап(ее устройство 13, шунтирующее преобразователь 6 частоты с системой управления. Электропривод 1 работает с номинальной, например, синхронной скоростью.
В качестве коммутирующего устройства 13 целесообразно использовать выключатель с входным логическим устройством, реализующим функцию Запрет. Турбомеханизм 2 при этом работает с максимальной скоростью, потери в преобразователе 6 частоты с системой управления отсутствуют, отсутствуют также потери в электроприводе 1 от несинусоидального тока.
В дальнейшем, например, из-за снижения аэродинамического сопротивления сети, на которую работает тур- бомеханизм 2, полученный режим регулирования производительности может стать неэкономичным. С целью возврата в зону экономичной работы необходимо вычислить скорость, при которой
может быть получено требуемое значение производительности, но при угле установки направляющего аппарата 3, равном нулю. Это достигается тем, что после выхода на естественную характеристику блок 27 вычисления скорости вращения вычисляет необходимую скорость в соответствии с выражением
H+22,5Q +500
-kiQZ+k.Q+k. -0,1Q +50Q+3450
H+dQ2 -Ц
i)
де
WH
(A) U)u -
,l,k,
kj, k 3
относительная скорость вращения вала вентилятора
текущая скорость вращения вала вентилятора, рац/с;. номинальная скорость вращения пала вентилятора, рад/с;
коэффициенты аппроксимации. Полученная зависимость определена
динамических характеристик Н f(Q) . для случая регулирования производительности изменением скорости вращения электропривода.
Второй блок 28 вычисления мощности сети вычисляет потребляемую мощность из сети в соответствии с выражением
35
зо
Ро
N6
где N5
aQ +bQ+c - мощность, потребляемая
вентилятором, BTJ
а, b, с - коэффициенты аппроксима- , ции семейства кривых выходных характеристик N f(Q) для случая регулирования производительности изменением скорости вращения электропривода. Например для вентилятора ВЦ-32 они равны: а ,
Ь 2-104 -0,67)3+1000 DB, с Со const ,
Ч кпд системы привода при питании от преобразователя частоты, обычно принимается равным 0,94- 6,95;
D - диаметр рабочего колеса вентилятора, м.
Блоки вычисления могут быть выпрл- )U Hbi на аналоговых элементах или на устройствах микропроцессорной техники.
Сигнал, пропорциональный ..вычисленному значению мощности сети, с выхода второго блока 28 вычисления мощности сети поступает на первый вход второго блока 29 сравнения, на второй вход которого поступает сигнал с выход п датчика 5 мощности, выходной сигнал второго блока 29 сравнения через второй нелинейньш блок 30 (типа вентиль) поступает на второй релейный элемент 31. Последний срабатывает, в результате от блока 24 питания через второй нормально разомкнутьн блок-контакт 35 второго релейного элемента 31 и второй нормально за.м- кнутый блок-контакт 15 первого релейного элемента 11 напряжение поступает на второй релейный элемент 31, Сигнал с выхода блока 27 вычисления скорости БраЕ(ения-поступает на вход .с выхода которого через первый нормально разомкнутый блок-контакт 34 второго релейсчого элемента 31 сигнал поступает на вход преобразователя 6 частоты с системой управления. Выходной сигнал второго релейного элемента 31 поступает на вход второго блока 36 выдержки времени, с выхода которого по истечении вьщержки времени сигнал поступает на второй вход коммутирующего устройства 13.
При срабатывании второ. релейного элемента 31 разрывается цепь питания первого релейного элемента 11 посредством второго нормально замкнутого блок-контакта 33 второго ре.лей- ного элемента 31, выходной сигнал первого нелинейного блока 8 при это равен нулю, так как мощность при регулировании направляющ1-ш аппаратом 3 превьняает мощность при регулировании скоростью электропривода 1. Одновременно становится равньц-i нулю сигнал, поступающий на третий вход блока 22 управления направляюиц-гм аппаратом. Направляющи аппарат 3 постепенно начинает открываться. Одновременно коммутирующее устройство 13 прекращает шунтировать преобразователь 6 частоты с системой управления, скорость вращения электропривода 11 постепенно уменьшается. Так происходит до тех пор, пока угол установки направляющего аппарата 3
не станет равным нулю, а скорость вращения вала электропривода 1 не станет равной вычисленному ее значению. К окончанию этого процесса электропривод 1 переходит на регулируемый режим работы, контроль энергетических параметров системы привода осуществляется рассмотренным образом.
В условиях некоторых производств: в турбокомпрессорах по производству сжатого воздуха, воздуходувках доменных печей и др. важно регулировать давление на выходе при меняющейся производительности. В таком случае устройство снабжается регулятором давления вместо регулятора производительности. Структура указанного регулятора может быть такой же, как и регулятора производительности, однако, параметры настройки должны быть другими. Их расчет осуществляет- /ся по известным методикам. Регулятор давления подключается к датчику дав- ления. Структура блоков вычисления мощности сети, установки углЪв направляющего аппарата, скорости вра
щения турбомеханизма остается без изменения.
Формула изобретения Устройство для управления электроприводом турбомеханизма с направляющим аппаратом вентиляторной установки, содержащее первьш блок сравнения, последовательно соединенные датчик мощности сети и преобразователь частоты с системой управления, по выходу связанный с электроприводом, блок задания производительности,пер- вьй нелинейный блок, датчик давления и датчик производительности, связанные с турбомеханизмом и последовательно соединенные первый релейный элемент, первый блок вьщержки времени и коммутирующее устройство, первый и второй выходы которого подключены соответственно к входу и выходу преобразователя частоты с системой управления, отличающееся тем, что, с целью повышения точности путем определения оптимального значения скорости электропривода для перехода на аэродинамическое регулирование производительности вентиляторной установки, первьш релейный элемент выполнен с двумя нормально
11
замкнутьми и двумя нормально разомкнутыми блок-контактами, а устройство дополнительно содержит последовательно соединенные блок вычисления угла установки направляющего аппарата и первый блок вычисления мощности сети, первый и второй запоминающие блоки, последовательно соединенные блок
управления направляющим аппаратом и исполнительньш механизм направляющего аппарата, связанный с направляющим аппаратом, блок питания, датчик скорости, связанный с электроприводом, датчик угла установки направляющего аппарата, связанный с направляющим аппаратом, последовательно соединенные блок вычисления скорости вращения, второй блок вычисления мощности сети, второй блок сравнения, второй нелинейный блок, второй релейный элемент с двумя нормально замкнутыми и двумя нормально разомкнутыми блок-контактами и второй блок выдержки времени, регулятор производитель- ности, связанный с блоком задания производительности, датчик мощности сети подключен к первому и второму входам соответственно первого и второго блоков сравнения, второй вход первого из которых подключен к выходу первого блока вычисления мощности сетИр первый и второй выходы блока задания производительности подключены к первому и второму входам соответственно блока управления направляющим аппаратом и преобразователя частоты с системой управления, третий вход которого подключен к датчику скорости, а четвертый через первый нормально разомкнутый блок-контакт второго релейного элемента к выходу второго запоминающего блока, вход которого через первый нормально замкнутый блок-контакт второго релейного элемента подключен к второму вьг
10
15
2025
44270412
ходу блока вычисления скорости вращения, выход второго блока выдержки времени подключен к второму входу коммутирующего устройства, датчик угла установки направляющего аппарата подключен к второму входу блока управления направляющим аппаратом, второй вход которого через первый нормально разомкнутый блозс-контакт первого релейного элемента подключен к выходу первого запоминающего блока, вход которого через первый нормально замкнутый блок-контакт первого релейного элемента подключен к второму выкоду блока вычисления угла установки направляющего аппарата, датчик давления подключен к первым входам блока вычисления скорости вращения и блока вычисления угла установки направляющего аппарата, датчик производительности подключен к регулятору производительности и к вторым входам первого и второго блоков вычисления мощности сети, блока вычисления скорости вращения и блока вычисления угла установки направляющего аппарата, выход первого из которых подключен к второму входу первого блока сравнения, выход которого через первьм нелинейный блок подключен к первому входу первого релейного элемента, второй вход которого через последовательно включенные второй нормально замк 1утый блок-контакт второго релейного элемента и второй нормально разомкнутый блок-контакт первого релейного элемента подключен к первому выходу блока питания, второй выход которого через последовательно включенные второй нормально замкнутый блок-контакт первого релейного элемента и второй нормально разомкнутьй блок-контакт второго релейного элемента подключен к второму входу вто30
35
40
45
рого релейного элемента.
| Устройство для управления насосной установкой | 1980 |
|
SU931974A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| . | |||
