Изобретение относится к машиностроению и может быть использовано цилиндрических зубчатых передачах с параллельными осями.
Целью изобретения является повышение надежности и снижение шума передачи за счет сглаживания колебаний жесткости передачи в целом при пересопряжении зубьев в зацеплени- ях, находящихся в противофазах.
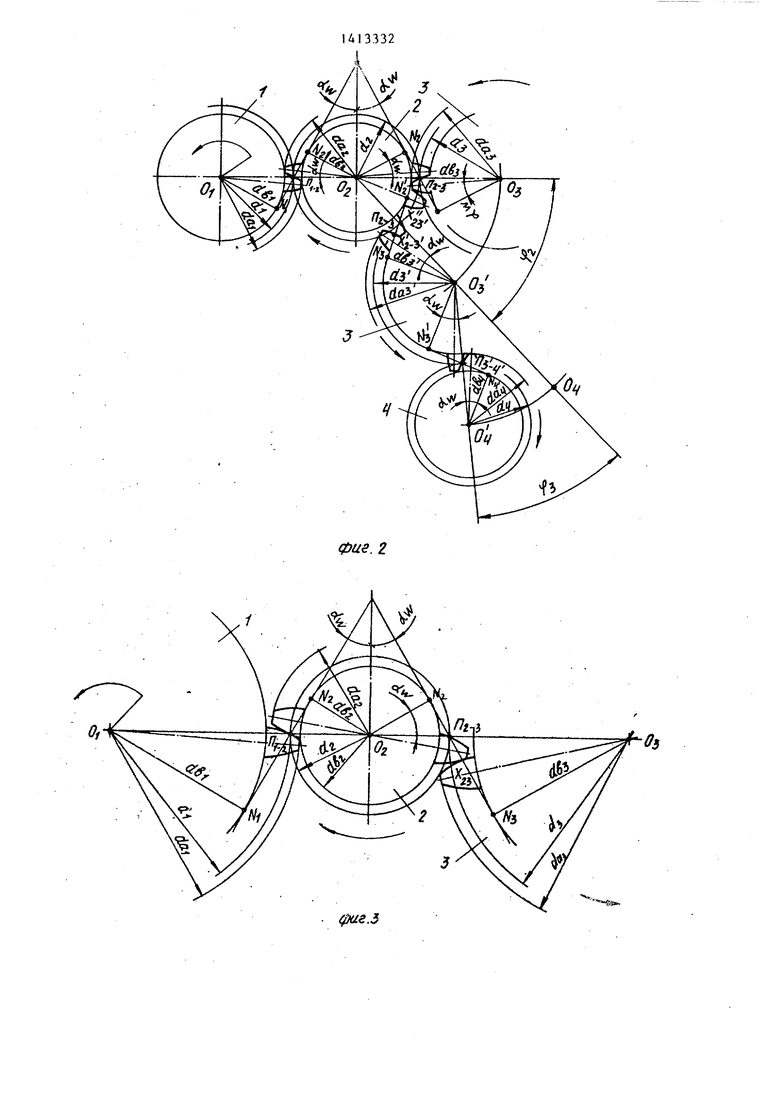
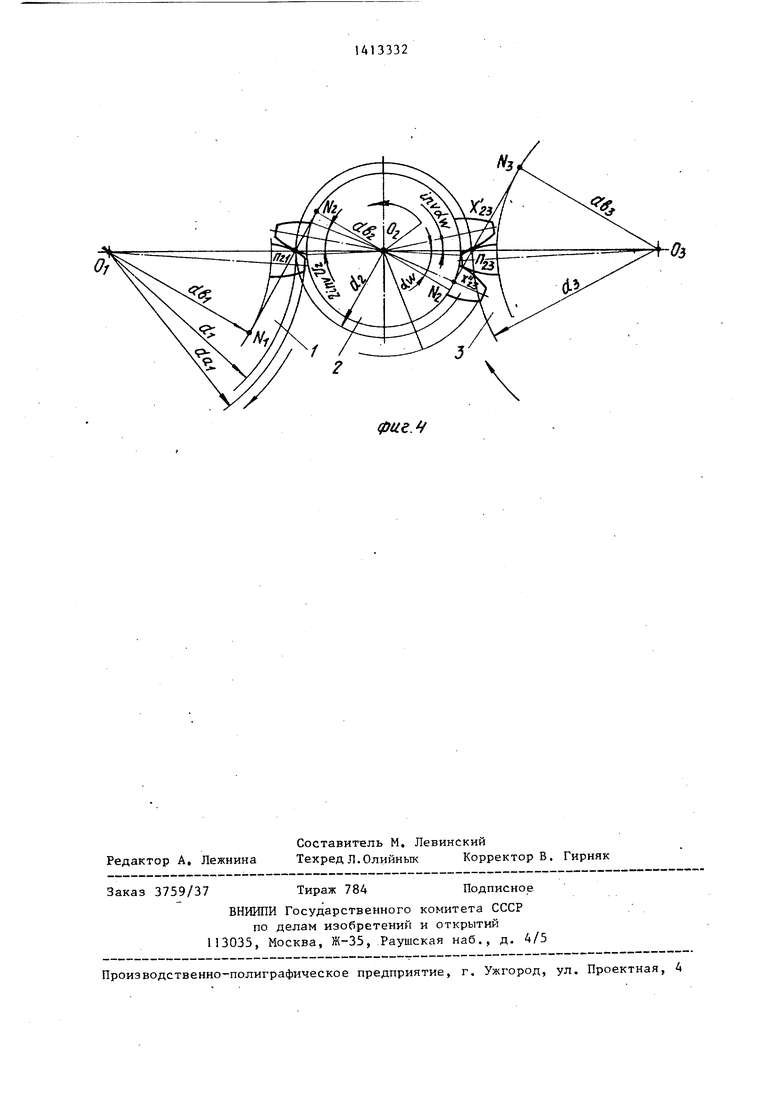
На фиг. 1 изображена прямозубая цилиндрическая передача с ведушим промежуточным колесом, имеющим четное число зубьев; на фиг. 2 - вари- ант передачи с ведомым промежуточны колесом с нечетным числом зубьев; на фиг, 3 - вариант передачи с ведомым промежуточным колесом с четным числом зубьев; на фиг. 4 - ва- риант передачи с ведущим промежуточным колесом с нечетным числом зубьев.
Прямозубая цилиндрическая передача с равными углами зацепления со держит последовательно зацепляющиеся одновенцовые зубчатые колеса 1- А с толщиной зуба, равной ширине впадины на начальной окружности, и коэффициентом перекрытия j 2,0 в каждом зацеплении. Угол V, между линией центров каждой предыдущей пары и линией центров каждой последующей пары зацепляющихся колес с вершиной в центре промежуточного колес каждой из соседних пар выбран равным при ведущем промежуточном колесе с четным числом зубьев или ведомом промежуточном колесе с нечетным числом зубьев.,
, Z.
Vr,- ,
-
- fji- tg arccos
iiio.:J
|ii± tg arccos io-t-l) +
.. (1)
4(1 + 2K) -f-,
при ведомом промежуточном колесе с четным числом зубьев или ведущем промежуточном колесе с нечетным числом зубьев
f - 7К rj ,
п
(2)
где
угол между линией центров каждой предыдущей пары и линией центров каждой последующей пары зацепляющихся колес;
п - порядковый номер последовательно зацепляющихся колес, являющихся промежуточными для каждой из пар, п 2,3,4...N-1; N - число колес; Z - число зубьев п-го колеса; Ag - диаметр основной окружности п-го колеса; da - диаметр окружности вершин
п-го колеса; 1/и - угол зацепления; ,.1, 2,3... - возможное число угловых
шагов,
При нечетном числе N геометрические параметры предьщущей и последующей пар колес могут быть рассчитаны по уравнению
Z tg arccos + arccos +
а„
+ Z,,,tg arccos
da
n-n
(ZH, + 2г„ + Z.,,,).6F. (3)
При заданной геометрии сопряженных колес известны схема зацепления для каждой пары колес и положение полюса по отношению к активной части линии зацепления.
Формула (1) отражает условие, при котором при известных схемах зацепления одновременньй контакт зубьев каждой последующей и предьщущей пар находится в противофазе.
В случае, если зацепление каждой последующей пары по отношению к предыдущей паре находится в противофазе, отклонение линий центров на угол, пропорциональный угловому шагу, не меняет характер зацепления колес, происходящий в противофазе. Из зтих условий получена формула (2).
Формула (3) получена при нечетном числе N последовательно зацепляющихся колес, когда геометрические параметры обеспечивают равенство однопар- ного (двухпарного) зацепления каждой предьщушей пары зоне двухпарного (однопарного) зацепления каждой последующей пары.
31413332
Передача работаег следующим обрацесо
зом (фиг. 1).
Зубчатые колеса 1 - 4 находятся в последовательном зацеплении с равными углами зацепления, с числом зубьев
г 9
i 3
Z и толщиной зубьев.
g «
6,
d. - d.
d,- d
Z, авной ширине впадины.
Центры колес 1 - 4 отмечены точами О, , 0 , Оз , 0 .
На фиг. 1 обозначены: . .
-диаметры основных окружностей зубчатых колес - 4;
- диаметры окружностей вершин тех же зубчатых колес;
-диаметры начальных окружностей тех же зубчатых колес; числа зубьев промежуточных зубчатых колес; линия зацепления пары зубчатых колес 1-2; линия зацепления пары зубчатых колес 2-3 в исходном состоянии; линия зацепления пары зубчатых колес 2-3 при расположении колеса 3 в центре Оз под углом Vj к линии центров 0,62;
линия зацепления пары зубчатых колес 3-4 при расположении колеса 4 в центре 0 под углом УЗ к линии центров
«гОз г
N - N
N,- N3
NX- N5
/ / Nj-N
К основным окружностям сопряжен- ньпс колес с диаметрами d
d.
и d
в.
и di
Ч
И dg ,
проведены кае л и
°3 °
сательные - линии зацепления для 1-2, Nj-Nj ддя 2-3, Перпендикуляр к линиям зацепления составляет С линией центров 0 0 угол зацепления /у .
Для каждой пары при , 2,0 лини зацепления N-N имеет активный участок зацепления с двумя двухпарными и одной однопарной зонами контакта. На каждой линии зацепления - П., 2-5 }-4 зацепления, делящий межцентровое расстояние d, на отрезки, пропорциональные числам зубьев 7.4 к Z
7
Z, и Zj, Zs и Z
равные радиусам начальных окружностей (I/2)d (i/2)d,,, (l/2)d,.
(l/2)d . Активная часть линии зацепления ВВ j Р для всех пар соответственно: BJ 82 Jii.i Рб ;
с,.з-Р« ; в.в f, . - Р/. в
зависимости от того, каким будет промежуточное колесо: ведущим с четным или нечетным числом зубьев или ведомым с четным или нечетньм числом зубьев, в последовательно зацепляющихся колесах контакт будет одновременно происходить или в зоне однопарного контакта, или двухпарного ко.нтакта. На фиг. 1 промежуточное колесо 2,
лежащее между колесами 1 и 3, имеет четное число зубьев и является ведущим. В этом случае контакт пар 1-2 и 2-3 происходит одновременно в зоне однопарного зацепления в полюсе зацепления П,, П.а.
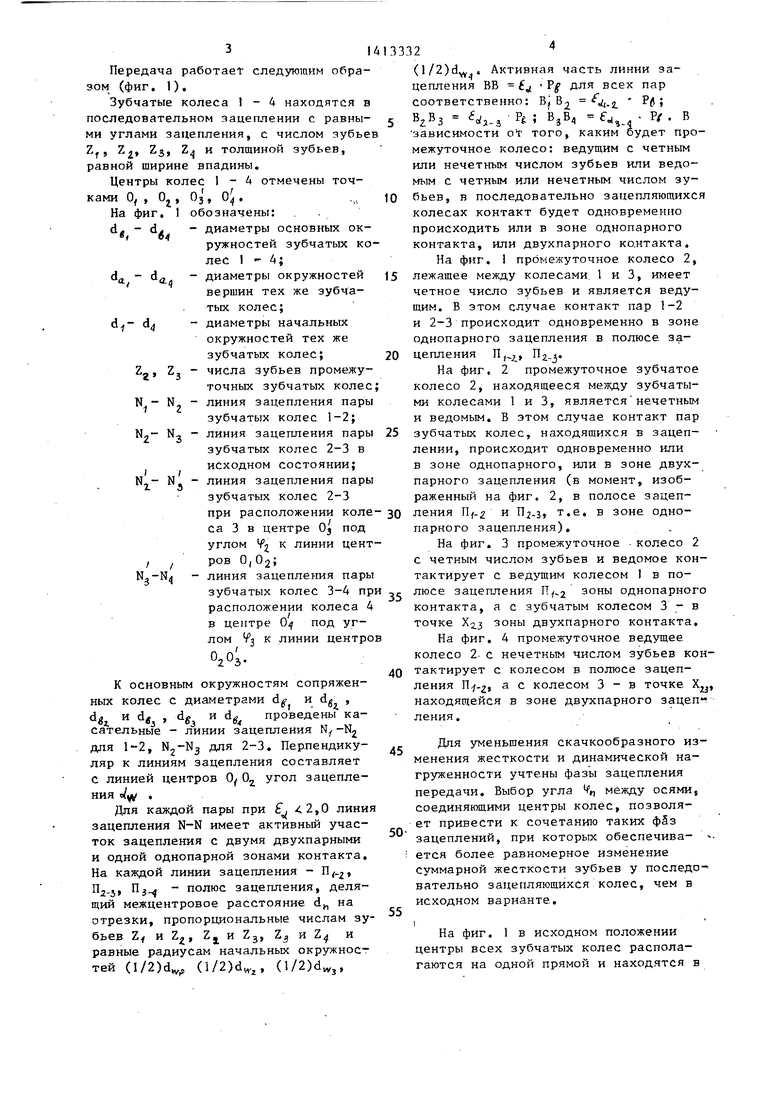
На фиг. 2 промежуточное зубчатое колесо 2, находящееся между зубчатыми колесами 1 и 3, является нечетным и ведомым. В этом случае контакт пар
зубчатых колес, находящихся в зацеплении, происходит одновременно или в зоне однопарного, или в зоне двухпарного зацепления (в момент, изображенный на фиг. 2, в полосе зацепления П|.2 и n.j, т.е. в зоне одно- парного зацепления).
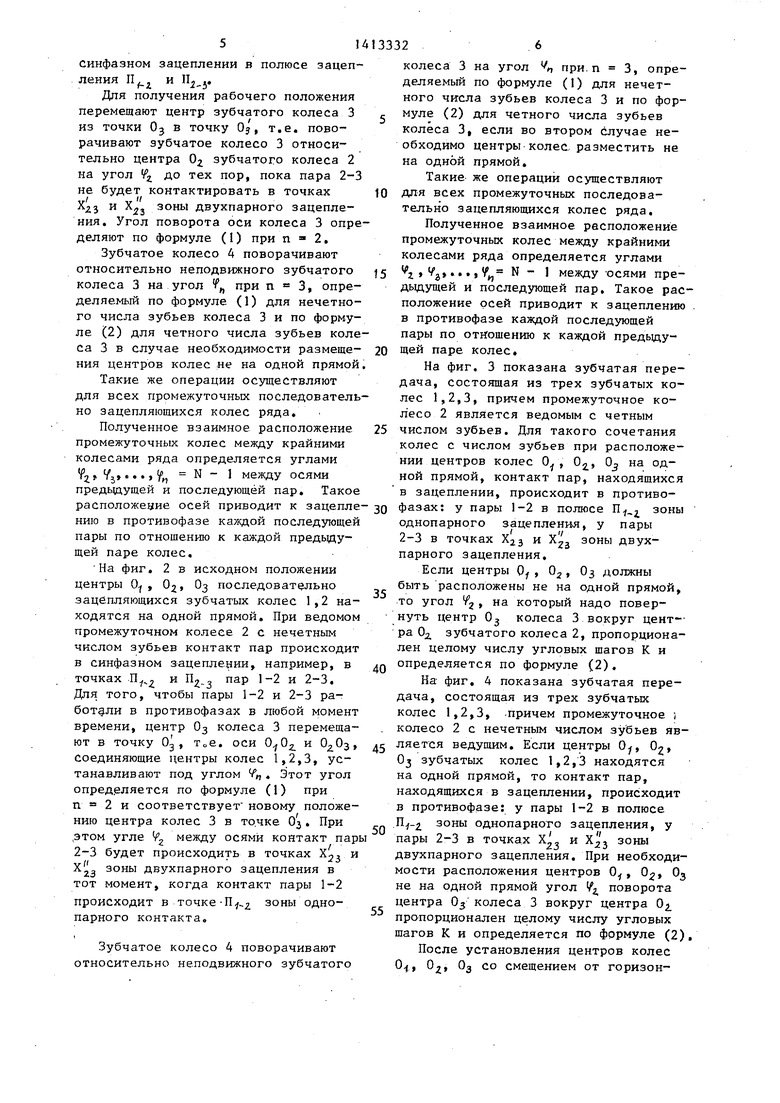
На фиг. 3 промежуточное - колесо 2 с четным числом зубьев и ведомое контактирует с ведущим колесом в полюсе зацепления зоны однопарного контакта, а с зубчатым колесом 3 - в точке Х2.3 зоны двухпарного контакта.
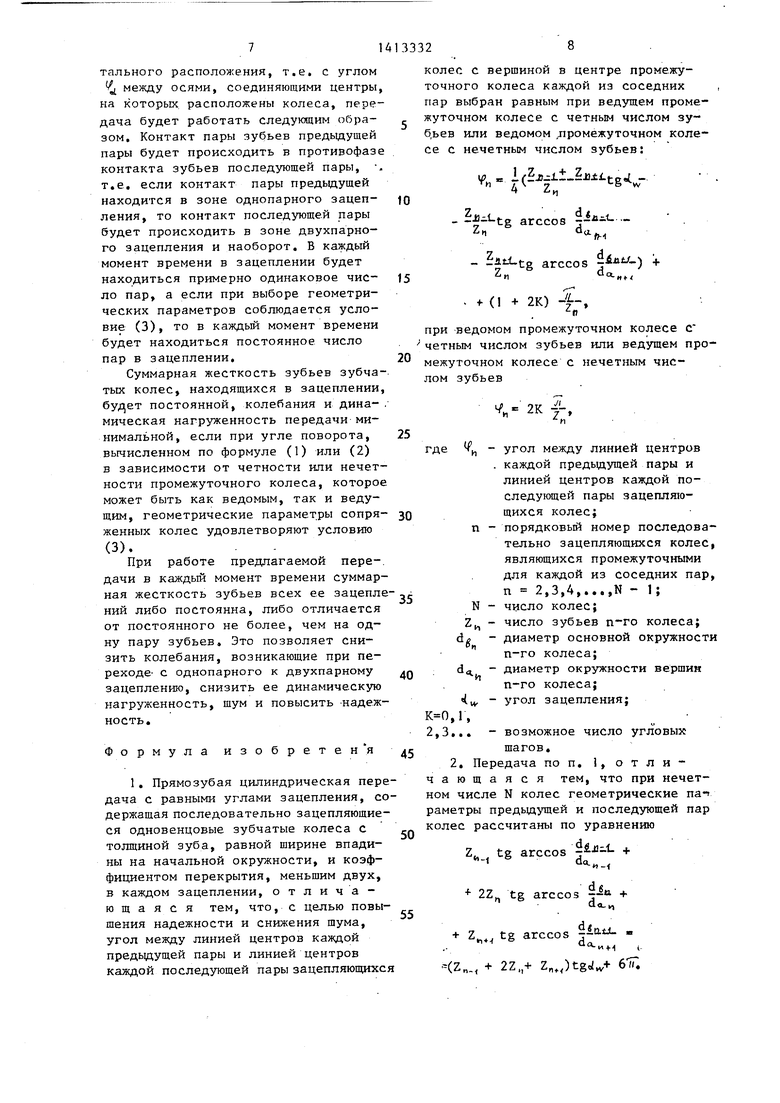
На фиг. 4 промежуточное ведущее колесо 2 с нечетным числом зубьев контактирует с колесом в полюсе зацепления , а с колесом 3 - в точке Х.у, находящейся в зоне двухпарного зацеп ления.
Для уменьшения скачкообразного изменения жесткости и динамической на- груженности учтены фазы зацепления передачи. Выбор угла % между осями, соединяющими центры колес, позволяет привести к сочетанию таких ф5з зацеплений, при которых обеспечива- ется более равномерное изменение суммарной жесткости зубьев у последо- вательно зацепляющихся колес, чем в исходном варианте.
i
На фиг. 1 в исходном положении
центры всех зубчатых колес располагаются на одной прямой и находятся в
синфазном зацеплении в полюсе зацепления П, и .
Для получения рабочего положения перемещают центр зубчатого колеса 3 из точки Oj в точку Oj, т.е. поворачивают зубчатое колесо 3 относительно центра 0 зубчатого колеса 2 на угол f/ j до тех пор, пока пара 2-3 не будет контактировать в точках и зоны двухпарного зацепления. Угол поворота оси колеса 3 определяют по формуле (I) при п 2.
Зубчатое колесо 4 поворачивают относительно неподвижного зубчатого колеса 3 на угол f при п 3, определяемый по формуле (1) для нечетного числа зубьев колеса 3 и по формуле (2) для четного числа зубьев колеса 3 в случае необходимости размещения центров колес не на одной прямой
Такие же операции осуществляют для всех промежуточных последовательно зацепляющихся колес ряда.
Полученное взаимное расположение промежуточных колес между крайними колесами ряда определяется углами V;i .. У„ N - 1 между осями предьщущей и последующей пар. Такое расположение осей приводит к зацеплению в противофазе каждой последующей пары по отношению к каждой предьщу- щей паре колес.
На фиг. 2 в исходном положении центры 0, 0, Оз последовательно зацепляющихся зубчатых колес 1,2 находятся на одной прямой. При ведомом промежуточном колесе 2 с нечетным числом зубьев контакт пар происходит в синфазном зацеплении, например, в тачках П, и П., пар 1-2 и 2-3. Для того, чтобы пары 1-2 и 2-3 ра- в противофазах в любой момент времени, центр Оз колеса 3 перемещают в точку Од, Тое. оси и , соединяющие центры колес 1,2,3, устанавливают под углом VV,. Этот угол определяется по формуле (I) при п 2 и соответствует новому положению центра колес 3 в то.чке Oj. При ,этом угле V 2 между осями контакт пар 2-3 будет происходить в точках Х и Х зоны двухпарного зацепления в тот момент, когда контакт пары 1-2 происходит в точке-И J2 зоны одно- парного контакта.
Зубчатое колесо 4 поворачивают относительно неподвижного зубчатого
колеса 3 на угол , при. п 3, определяемый по формуле (I) для нечетного числа зубьев колеса 3 и по фор- муле (2) для четного числа зубьев колеса 3, если во втором случае необходимо центры колес разместить не на одной прямой.
Такие же операции осуществляют 0 для всех промежуточных последовательно зацепляющихся колес ряда.
Полученное взаимное расположение промежуточных колес между крайними колесами ряда определяется углами
г г ч (1 между -осями предыдущей и последующей пар. Такое расположение осей приводит к зацеплению . в противофазе каждой последующей пары по отношению к каждой предыду0 щей паре колес.
На фиг. 3 показана зубчатая передача, состоящая из трех зубчатых колес 1,2,3, причем промежуточное колесо 2 является ведомым с четным
5 числом зубьев. Для такого сочетания колес с числом зубьев при расположении центров колес 0, Oj, 0 на одной прямой, контакт пар, находящихся в зацеплении, происходит в противо0 фазах: у пары 1-2 в полюсе П зоны однопарного зацепленил, у пары 2-3 в точках Х2з и Х, зоны двухпарного зацепления.
Если центры 0, 0, Оз должны быть расположены не на одной прямой, то угол 2 , на который надо повернуть центр Oj колеса 3 вокруг цент-- ра 0-2. зубчатого колеса 2, пропорционален целому числу угловых щагов К и
д определяется по формуле (2).
На фиг. 4 показана зубчатая передача, состоящая из трех зубчатых колес 1,2,3, .причем промежуточное i колесо 2 с нечетным числом зубьев яв ляется ведущим. Если центры Оу, 02, 0 зубчатых колес 1,2,3 находятся на одной прямой, то контакт пар, находящихся в зацеплении, происходит в противофазе: у пары 1-2 в полюсе i-i зоны однопарного зацепления, у пары 2-3 в точках Х и зоны двухпарного зацепления. При необходимости расположения центров 0, 0, Оз не на одной прямой угол Vj, поворота центра Оз колеса 3 вокруг центра О2. пропорционален целому числу угловых шагов К и определяется по формуле (2).
После установления центров колес 0, Од, Оз со смещением от горизон5
5
тального расположения, т.е. с углом f между осями, соединяющими центры, на которых расположены колеса, передача будет работать следующим образом. Контакт пары зубьев предыдущей пары будет происходить в протирофазе контакта зубьев последующей пары, . т.е. если контакт пары предыдущей находится в зоне однопарного зацепления, то контакт последующей пары будет происходить в зоне двухпарно- го зацепления и наоборот. В каждый момент времени в зацеплении будет находиться примерно одинаковое число пар, а если при выборе геометрических параметров соблюдается условие (3), то в каждый момент времени будет находиться постоянное число пар в зацеплении.
Суммарная жесткость зубьев зубчатых колес, находящихся в зацеплении, постоянной, колебания и дина- мическая нагруженность передачи минимальной, если при угле поворота, вычисленном по формуле (1) или (2) в зависимости от четности или нечетности промежуточного колеса, которое может быть как ведомым, так и ведущим, геометрические параметры сопряженных колес удовлетворяют условию (3).. При работе предлагаемой пере-, дачи в каждый момент времени суммарная жесткость зубьев всех ее зацеплений либо постоянна, либо отличается от постоянного не более, чем на одну пару зубьев. Это позволяет снизить колебания, возникающие при переходе- с однопарного к двухпарному зацеплению, снизить ее динамическую нагруженность, шум и повысить -надежность.
Формула изобретен я
1. Прямозубая цилиндрическая передача с равными углами зацепления, содержащая последовательно зацепляющиеся одновенцовые зубчатые колеса с толщиной зуба, равной ширине впадины на начальной окружности, и коэффициентом перекрытия, меньшим двух, в каждом зацеплении, отличающаяся тем, что, с целью повышения надежности и снижения шума, угол между линией центров каждой предыдущей пары и линией центров каждой последующей пары зацепляющихс
колес с вершиной в центре промежуточного колеса каждой из соседних пар выбран равным при ведущем промежуточном колесе с четным числом зу б.ьев или ведомом .лромежуточном колесе с нечетным числом зубьев:
Vn
if5jj-ii-2j3ii.tE«(. - А - Z,
П
- arccos 3- Zhda,
ii«Ait...
15
- arccos ) + 1 °e-«f
20
- (1 + 2K) ,
при ведомом промежуточном колесе С четным числом зубьев или ведущем промежуточном колесе с нечетным числом зубьев
Ч.
9К- К 7 ,
5
0
5
0
5
0
где
, п N - Z.
,Г, 2,3...
угол между линией центров каждой предьщущей пары и линией центров каждой последующей пары зацепляющихся колес;
порядковый номер последовательно зацепляющихся колес, являющихся промежуточными для каждой из соседних пар, п 2,3,4,...,N - 1; число колес; число зубьев п-го колеса;
-диаметр основной окружности п-го колеса;
-диаметр окружности вершим п-го колеса;
-угол зацепления;
возможное число угловых щагов.
2. Передача по п. 1, отличающаяся тем, что при нечетном числе N колес геометрические па- раметры предыдущей и последующей пар колес рассчитаны по уравнению
Z tg arccos +
1QQ
«-С
2Z.
tg arccos --1 + а«-и
+ Z tg arccos
Eiatx. «
-n+.
-(Z., + 2Z.,+ Zn,,)tg, 6T.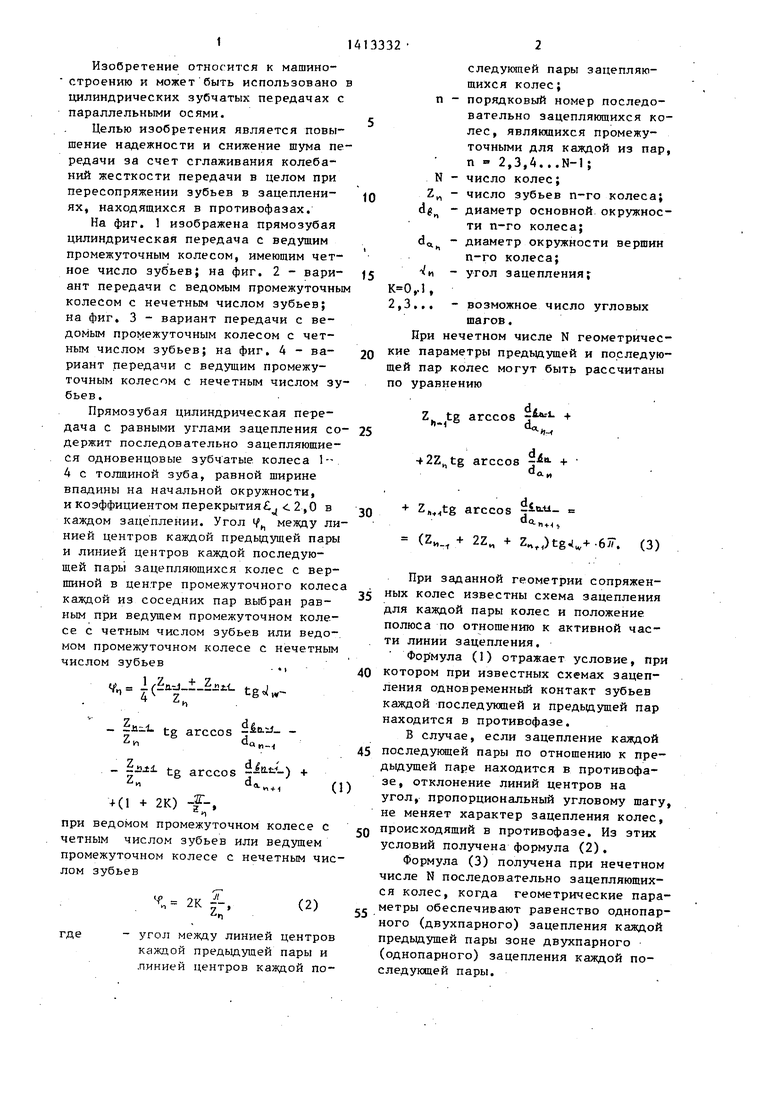
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопоточная зубчатая передача | 1986 |
|
SU1555568A1 |
| ГИТАРА СМЕННЫХ ШЕСТЕРЕН | 1992 |
|
RU2044202C1 |
| Зубчатая передача | 1983 |
|
SU1120131A1 |
| Зубчатая цилиндрическая передача | 1983 |
|
SU1135935A1 |
| Зубчатая передача | 1984 |
|
SU1262171A1 |
| Прямозубая цилиндрическая передача | 1990 |
|
SU1788364A1 |
| УСТРОЙСТВО ДИНАМИЧЕСКОГО СОЕДИНЕНИЯ ДЛЯ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МЕЖДУ ДВУМЯ ВАЛАМИ | 1990 |
|
RU2054592C1 |
| ЗУБЧАТОЕ КОЛЕСО | 2015 |
|
RU2580407C1 |
| ПРЯМОЗУБАЯ ЭВОЛЬВЕНТНАЯ ПЕРЕДАЧА С ПОВЫШЕННОЙ ПЛАВНОСТЬЮ ХОДА | 1972 |
|
SU422894A1 |
| Зубчато-роликовая передача | 1985 |
|
SU1293414A1 |
Изобретение относится к машиностроению. Цель изобретения - повышение надежности и снижение шума прямозубой цилиндрической передачи за счет сглаживания колебаний жесткое- . ти передачи при пересопряжениях зубьев в зацеплениях, находящихся в противофазах. Зубчатая передача содержит зубчатые колеса ,2,3,... N с толщиной зубьев, равной ширине впадины на начальной окружности, с равными углами зацепления, с числами f зубьев Z , Z, .t,,7,ff и находящимися в последовательном зацеплении. В исходном состоянии центры 0, 02, 0 ,.., ,0дг колес 1,2,3, ...,N находятся на одной прямой. Для приведения передачи в рабочее состояние поворачивают каждое последующее колесо относительно центра предьщу- щего на углы Yj V, i VV образованные линиями центров каждой предыдущей пары колес и каждой после- дуюо1ей. Центры колес занимают положение в рабочем состоянии соответственно 0, 02, Оз,...$ Off . Разворот колес на углы /г V V обеспечивает работу зацеплений пар колес в противофазах, т.е. снижает колебания суммарной жесткости передачи. Формула изобретения содержит соотношения для выбора углов fц/ и соотношения между геометрическими па раметрами зацеплений передачи. з.п. ф-лы, 4 ил. « Ьд со ю
Фие. 2
фае.5
Фи.
| Кудрявцев В.Н | |||
| Планетарные передачи, М.: Машиностроение, 1966, с 306. |
