поминающий блок 9 фиксирует сигналы, поступающие на него от преобразова- телейТ, 2, 3, 4. Через время /st коммутатор 8 автоматически возвращается в первую позицию, при которой идентификатор 10 подключается к преобразователям 2, З , 4 , 5.Идентификатор 10 сопоставляет сигналы, поступающие с запоминающего блока 9. Каждый раз после формироваиия идентификатором 10 очередного импульса вычислительный блок 7 вьюает текущий результат измерения. В ходе указанного процесса вьтолняется регулирование чувствительности блока 3. При появлении конца проката в координате Х.1 датчик 11 формирует импульс, который подается и на регулятор 6 чувствительности, формирующий пороговьш сигнал Р, нарастающий от уровня Р до Рд. Сигнал Р поступает на входы компараторов 5, сигнал 1 на выходе которых будет тогда, когда входной сигнал превышает установленный порог Р. При поступлении на входы детектора 14 максимума максимального количества сигналов вида 1 детектор 14 подает управляющий сигнал установки очередного уровня Р на вход регулятора 6 чувствительности на все время контроля проката, т.е. до тех пор, пока его передний конец не переместится за координату Х на расстоя- .- ние J. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения конца горячего проката | 1986 |
|
SU1479818A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для измерения частотных характеристик диэлектрических свойств веществ | 1982 |
|
SU1051455A1 |
| УЛЬТРАЗВУКОВОЙ МНОГОКАНАЛЬНЫЙ ДЕФЕКТОСКОП | 2001 |
|
RU2217740C2 |
| Индикатор линейной координаты рентгеновского излучателя | 1980 |
|
SU893204A1 |
| Дискретный регулятор уровня | 1984 |
|
SU1262461A1 |
| Способ акустико-эмиссионного контроля металлических объектов и устройство для его осуществления | 2020 |
|
RU2736175C1 |
| Устройство для управления моталкой сортового стана | 1986 |
|
SU1357199A1 |
| Устройство для определения местоположения источника акустической эмиссии | 1987 |
|
SU1499224A1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышеьте точности за счет повышения помехоустойчивости устройства. При появлении конца проката в координате Х датчик 11 наличия проката формирует импульс малой длительности ut, который через элемент ИЛИ 12 поступает на управляющий вход коммутатора 8. При этом за- X/ Хо «и СП с ;о 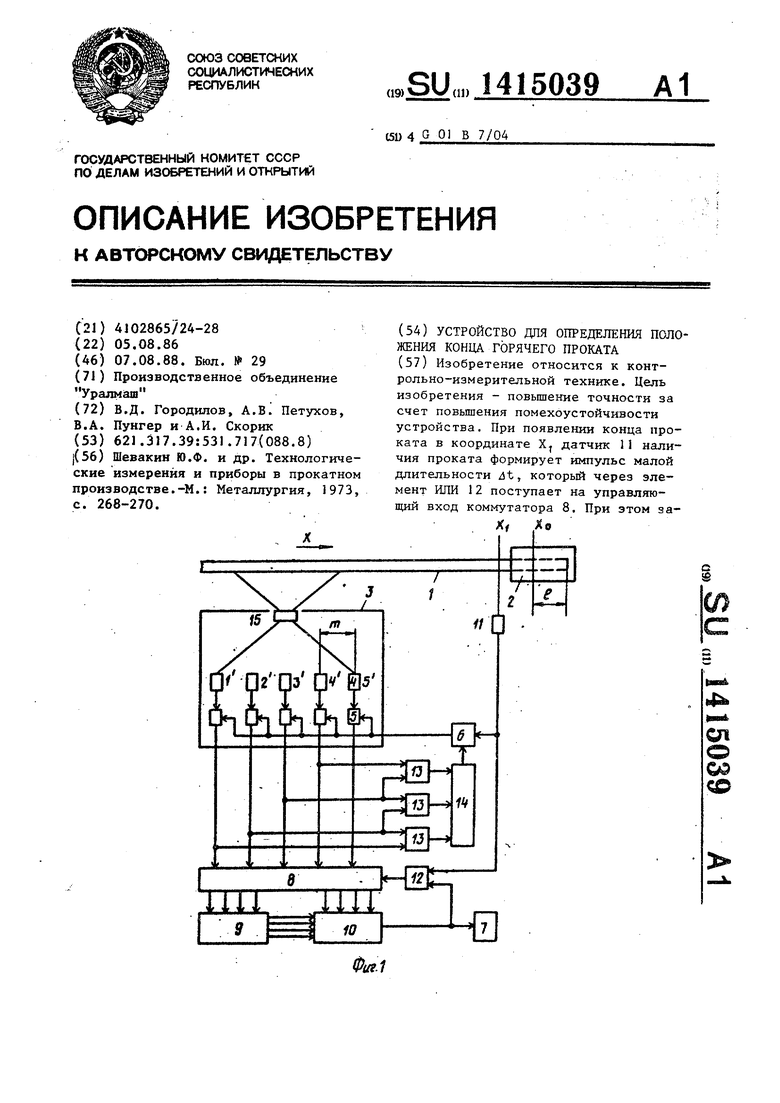
f
Изобретение относится к контрольно-измерительной технике, в частности, к фотозлектрическим измерительным устройствам, и может быть использовано для определения положения конца движущегося проката, например, при его раскрое.
Цель изобретения - повышение -Точности за счет повьрения помехоустойчивости устройства.
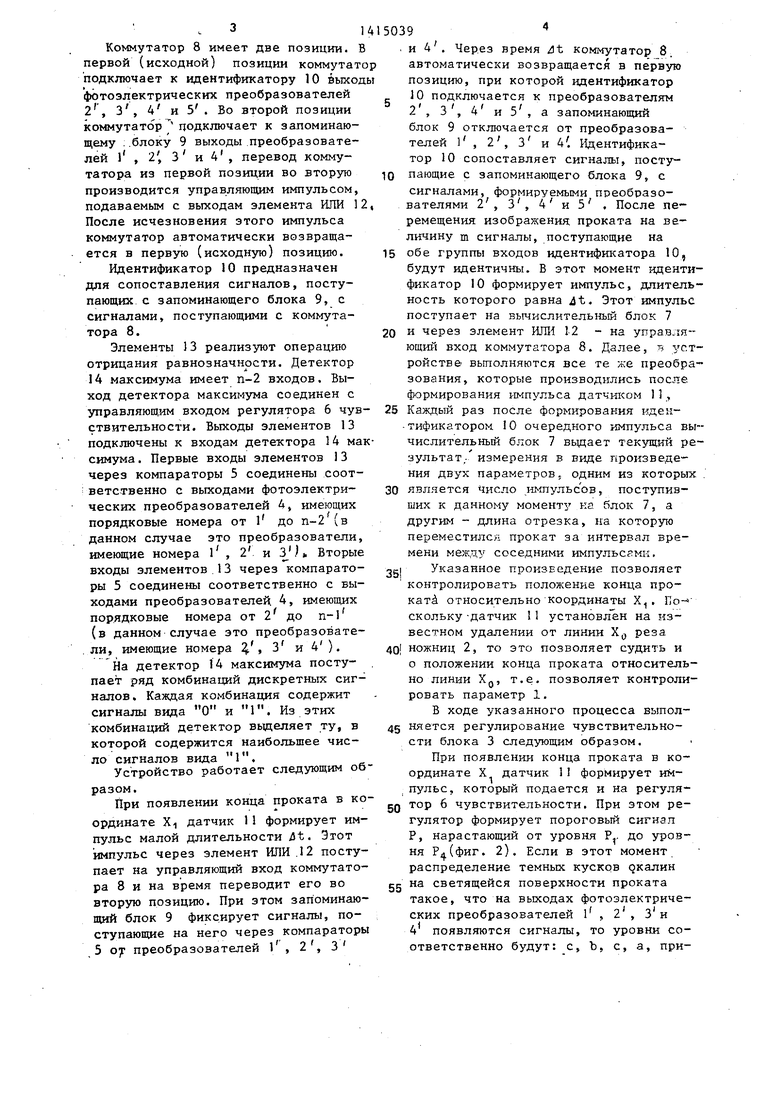
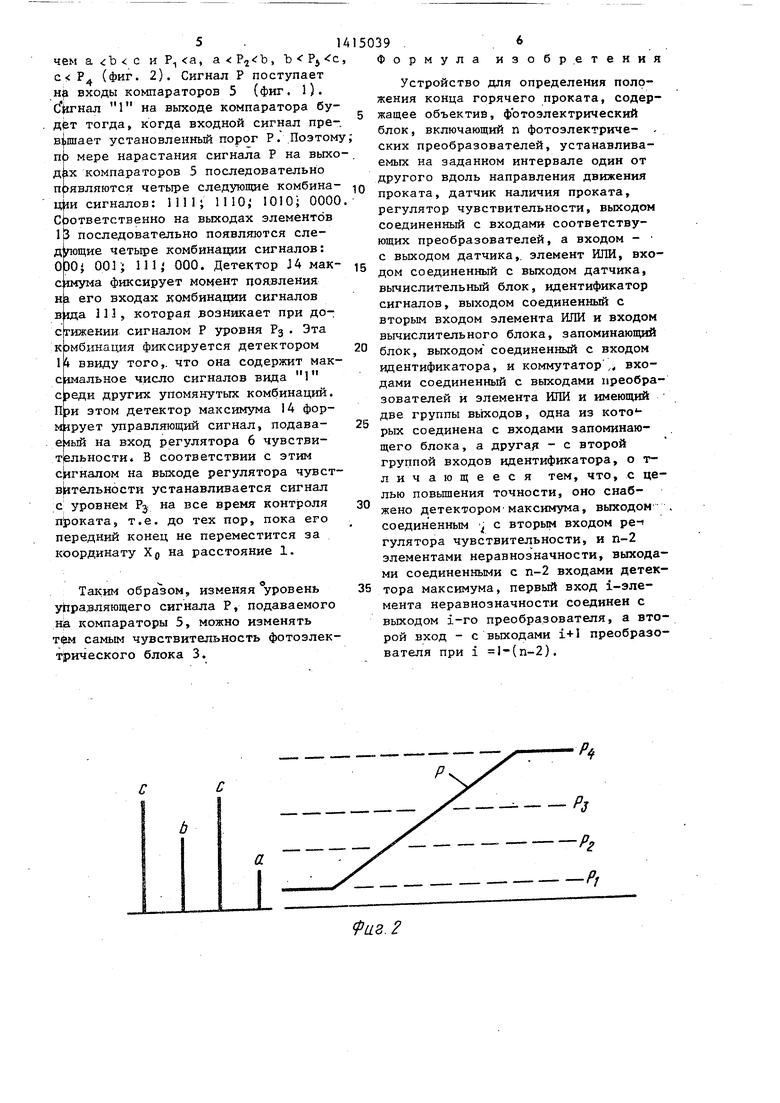
На фиг. I приведена функциональная схема устройства; на фиг. 2 - соотношение между уровнями сигналов а, Ъ, с, Р на выходах фотоэлектриче- сТких преобразователей и регулятора чувствительностиj на фиг, 3 - комбинация сигналов на выходе фотоэлектрического преобразователя.
Устройство для определения положения конца горячего проката 1 относительно линии реза Х ножниц 2 содержит фотоэлектрический блок 3, включающий п фотоэлектрических преобразователей 4 (например,: фотодиодов), устанавливаемых на заданном интервале m один от другого вдоль направления движения проката, и компараторов 5, регулятор 6 чувствительности, вычислительный блок 7, коммутатор 8, подключенный к выходу фотб- электрического блока 3 и имеющий две группы выходов, к одной из которых подключен запоминающий блок 9, а к
5
другой - идентификатор 10 сигналов, выходы запоминающего блока 9 соединены с второй группой входов идентификатора 10, вычислительньй блок 7 подключен к выходу идентификатора 10, датчик 11 наличия проката, элемент ИЛИ 12, п-2 элементов 13 неравнозначности и детектор 1| 14 максимума.
Выходы идентификатора 10 и датчи ка 11 (например, фотореле) подключены к входам элемента ШШ 12, выход - которого соединен с управляющим входом коммутатора 8.
Устройство (фиг. 1) контролирует положение переднего конца горячего проката 1 относительно линии реза Х ножниц 2 с тем, чтобы от передней части проката ножницами была отрезана заготовка требуемой длины 1. Для этого конец проката должен остановиться за линией реза на расстоянии 1. Прокат перемещается по технологической линии в направлении X.
Датчик 11 контролирует появление конца проката 1 в координате Х.
Порядковые номера преобразователей 4 обозначены (на фиг. 1) символами 1, 2,3,4 нЗ.На выходах преобразователей 4 установлены компараторы 5 (при необходимости вместо них могут быть использованы усилители- формирователи с регулируемым порогом срабатывания).
0
0
.3
Коммутатор 8 имеет две позиции. В первой (исходной) позиции коммутато подключает к идентификатору 10 йыход фотоэлектрических преобразователей 2, З , 4 и 5 . Во второй позиции коммутатор подключает к запоминающему . .блоку 9 выходы преобразователей , 2, З и 4 , перевод коммутатора из первой позиции во вторую производится управляющим импульсом, подаваемым с выходам элемента ИЛИ 12 После исчезновения этого импульса коммутатор автоматически возвращается в первую (исходную) позицию. Идентификатор 10 предназначен для сопоставления сигналов, поступающих с запоминающего блока 9, с сигналами, поступающими с коммутатора 8.
Элементы 13 реализуют операцию отрицания равнозначности. Детектор 14 максимума имеет п-2 входов. Выход детектора максимума соединен с управляющим входом регулятора 6 чувствительности. Выходы элементов 13 подключены к входам детектора 14 максимума . Первые входы элементов 13 через компараторы 5 соединены соот- ветственно с выходами фотоэлектрических преобразователей 4, имеющих порядковые номера от 1 до п-2 (в данном случае это преобразователи, имеющие номера l , 2 и Вторые входы элементов . 13 через компараторы 5 соединены соответственно с выходами преобразователей. 4, имеющих пор.ядковые номера от 2 до п-1 (в данном случае это преобразовате- . ли, имеющие номера , 3 и 4).
На детектор 14 максимума посту- пает ряд комбинаций дискретных сигналов. Каждая комбинация содержит сигналы вида О и 1. Из этих комбинаций детектор вьщеляет ту, в которой содержится наибольшее число сигналов вида 1.
Устройство работает следующим образом.
При появлении конца проката в координате Xi датчик 11 формирует импульс малой длительности ut. Этот импульс через элемент ИЛИ .12 поступает на управляющий вход коммутатора 8 и на время переводит его во вторую позицию. При этом запоминающий блок 9 фиксирует сигналы, поступающие на него через компараторы 5 Of преобразователей 1 ,2,3
9
и 4. Через время t коммутатор 8. автоматически возвращается в первую позицию, при которой идентификатор JO подключается к преобразователям
-(/.(
, J , ч и Ь , а запоминающий блок 9 отключается от преобразователей 1 , 2, 3 и 4. Идентификатор 10 сопоставляет сигналы, посту- пающие с запоминающего блока 9, с
сигналами, формируемыми преобразователями 2, 3, 4 и 5 . После перемещения изображения проката на ве- пкчину m сигналы, поступающие на
обе группы входов идентифшсатора 10, будут идентичны. В этот момент идентификатор 10 формирует импульс, длительность которого равна t. Этот импульс поступает на вычислительный блок 7
и через элемент ИЛИ 12 - на управляющий вход коммутатора 8. Далее, в устройстве- выполняются все те же преобра™ зования, которые производились после формирования импульса датчиком 11,
Каждый раз после формирования идеи- -тификатором 10 очередного импульса вычислительный блок 7 вьщает текущий результат., измерения в виде произведения двух параметров, одним из которых
является Число 11мпульс ов, поступивших к данному моментз ка блок 7, а другим - длина отрезка, на которую переместился прокат за интервал времени между соседними импулъсвмк,
Указанное произведение позволяет контролировать положение конца про- катА относительно координаты Х . скольку -датчик 1 1 установл ен на известном удалении от линии Х, реза
ножниц 2, то это позволяет судить и о положении конца проката относительно линии XQ, т.е. позволяет контролировать параметр 1.
В ходе указанного процесса выполняется регулирование чувствительности блока 3 следующим образом.
При появлении конца проката в координате X датчик 11 формирует импульс, который подается и на регулятор 6 чувствительности. При этом регулятор формирует пороговый сигнал Р, нарастающий от уровня Р-. до уровня Р(фиг. 2). Если в этот момент распределение темных кусков окалин
на светящейся поверхности проката такое, что на выходах фотоэлектрических преобразователей 1 , 2 , З и 4 появляются сигналы, то уровни соответственно будут: с, Ъ, с, а, причем а :Ъ с и Р а, а , Ъ Pj с с Р (фиг. 2). Сигнал Р поступает н входы компараторов 5 (фиг. 1). Сигнал 1 на выходе компаратора будет тогда, когда входной сигнал пре- в ппает установленный порог Р. .Поэтом по мере нарастания сигнала Р на выхо Д|31Х компараторов 5 последовательно появляются четыре следующие комбина- 1ФИ сигналов: 1111; 1110 1010; 0000 СЬответственно на выходах элементов 1& последовательно появляются сле- д1 пощие четыре комбинации сигналов: ОЭО} 001i lllj 000. Детектор J4 мак- сдмума фиксирует момент появления на его входах комбинации сигналов 1 5 которая возникает при до-; сгижении сигналом Р уровня РЗ . Эта :комбинация фиксируется детектором Н ввиду того,, что она содержит максимальное число сигналов вида 1 среди других упомянутых комбинаций. При этом детектор максимума 14 формирует з равляющий сигнал, подава- еяый на вход регулятора 6 чувстви- т льности. В соответствии с этим сигналом на вькоде регулятора чувствительности устанавливается сигнал с уровнем PJ на все время контроля порока та, т.е. до тех пор, пока его передний конец не переместится за координату Хд на расстояние 1.
Таким образом, изменяя уровень у|пра,вляющего сигнала Р, подаваемого на компараторы 5, можно изменять тем самым чувствительность фотоэлектрического блока 3.
С С Ь
а
Q 5 0 5 о
5
Формула изобретения
Устройство для определения положения конца горячего проката, содержащее объектий, фотоэлектрический блок, включающий п фотоэлектрических преобразователей, устанавливаемых на заданном интервале один от другого вдоль направления движения проката, датчик наличия проката, регулятор чувствительности, выходом соединенный с входами соответствующих преобразователей, а входом - с выходом датчика,, элемент ИЛИ, входом соединенный с выходом датчика, вычислительный блок, идентификатор сигналов, выходом соединенный с вторым входом элемента ИЛИ и входом вычислительного блока, запоминающий блок, выходом соединенный с входом идентификатора, и коммутатор / входами соединенный с выходами преобразователей и элемента ИЛИ и имеющий две группы вьгходов, одна из рых соединена с входами запоминающего блока, а друга/1 - с второй ГРУППОЙ входов идентификатора, о т- личающееся тем, что, с целью повьппения точности, оно снабжено детектором максимума, выходом . соединенным с вторым входом ре- гулятора чувствительности, и п-2 элементами неравнозначности, выходами соединенными с п-2 входами детектора максимума, первый вход i-эле- мента неравнозначности соединен с выходом i-ro преобразователя, а второй вход - с выходами i+1 преобразователя при 1 1-(п-2).
LL8.2
Составитель Л. Крюкова Редактор В. Бугренкова Техред А.Кравчук Корректор л. Пипипенко
Заказ 3861/36
В1ШИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
fuz.3
Тираж 680
Подписное
