I
отi
гидросистемы j
бретения является повышение точности автовождения машинно-тракторного агрегата, Уг-- ломерная радионавигацией ная система содержит вычислительное устройство 1 с клавишным устройством 2 ввода и устройством 3 отображения информации, связанное с первичным преобразователем 4 радионавигационных параметров, исполнительный механизм 5 управления поворотом направляющих колес трактора, а также датчики 6 теоретической скорости, 7 положения направляющих колес, 8 бокового крана трактора, постоянное перепрограммируемое запоминающее устройство 9, цифровой регулятор 10 интенсивности управляющего воздействия. На территории района в точках с
известными координатами располагаются радиостанции радиомаяков А,В,С. Перед началом движения МТА посредством клавишного устройства ввода 2 оператором вводятся
координаты радиомаяков, опорных точек границ поля и маршрута переезда, ширины поворота захвата агрегата. По окончании ввода исходных данных вычислительное устройство 1 производит вычисления. Перед
началом движения МТА вычислительное устройство 1 вводит информацию от датчиков положения антенн пеленгаторов, вычисляет средние значения пеленгов на радиомаяки А,В,С и производит расчет текущих координат МТА.З з.п.ф-лы,10 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |





Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического управления движением мобильных сельскохозяйственных агрегатов, и может быть использовано для автоматического направления движения МТА в ходе выполнения полевых и транспортных механизированных работ. Целью изо
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического управления движением мобильных сельскохозяйственных агрегатов, и может быть использовано для автоматического направления движения МТА в ходе выполнения полевых и транспортных механизированных работ.
Целью изобретения является повышение точности автовождения машин но-трак- .торного агрегата.
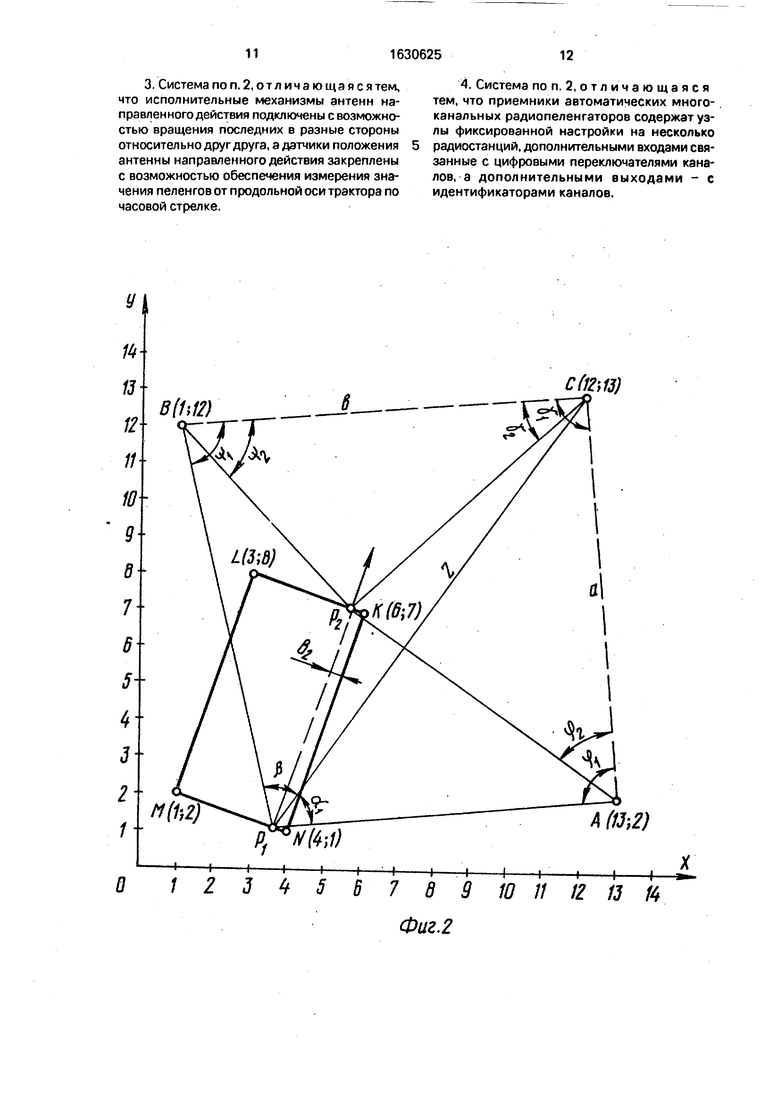
На фиг.1 представлена блок-схема управляющего устройства предлагаемой угломерной радионавигационной системы автовождения МТА; на фиг.2 - расчетная схема к определению местоположения МТА в ходе полевых работ; на фиг.3-6 - блок-схема алгоритма управления; на фиг. 7 - блок - схема идентификатора каналов; на фиг.8 - блок-схема цифрового переключателя ; на фиг.9 - блок-схема вычислительного устройства; на фиг. 10 - схема сопряжения.
Система (фиг.1) содержит вычислительное устройство 1 с клавишным устройством 2 ввода и устройством 3 отображения инфор- мации, связанное с первичным преобразователем 4 радионавигационных параметров, исполнительныймеханиэм5упрэвления поворотом направляющих колес трактора, а также датчики теоретической скорости 6, положе- ния направляющих колес 7 и бокового крена трактора 8, подключенные к входам вычислительного устройства 1, постоянное перепрограммируемое запоминающее устройство 9, информационным выходом подключенное к входу вычислительного устройства 1, а управляющим входом - к выходу последнего, причем исполнительный механизм 5 управления поворотом направляющих колес трактора электрическим входом подключен
0
0
„
0
к выходу вычислительного устройства 1, а гидравлическим (показан пунктирной линией) - к цифровому регулятору 10 интенсивности управляющего воздействия, имеющему связи с гидросистемой трактора и выходом вычислительного устройства 1.
Первичный преобразователь 4 радионавигационных параметров содержит два автоматических многоканальных радиопеленгатора 11 и 12, каждый из которых включает приемник 13, к основному входу 14 которого подключена антенна 15 направленного действия, механически связанная с исполнительным механизмом 16и датчиком 17 положения антенны 15 направленного действия, к основному выходу 18 через компаратор 19 подключены два буферныхзапоминающих устройства 20 и 21. Буферное устройство 20 вторым входом связано с датчиком 17 положения антенны 15 направленного действия, а к дополнительному выходу 22 приемника 13 через идентификатор 23 каналов подключено второе буферное запоминающее устройство 21, второй вход которого связан с выходом первого буферного запоминающего устройства 20, а выход - с вычислительным устройством 1, причем выход компаратора 19 через цифровой переключатель 24 связан с дополнительным входом 25 приемника 13. Антенны 15 направленного действия автоматических многоканальных радиопеленгаторов 11 и 12 вращаются в разные стороны одна относительно другой, а значения пеленгов на радиостанции измеряются датчиками 17 положения антенн 15 направленного действия от продольной оси трактора по часовой стрелке.
Приемники 13 автоматических многоканальных радиопеленгаторов 11 и 12 содержат узлы фиксированной настройки (не
показаны) на несколько радиостанций, дополнительными входами 25 связанные с цифровым переключателями 24 каналов, а дополнительными выходами 22 - с идентификаторами 23 каналов.
Идентификатор 23 каналов (фиг.7) содержит активные полосовые фильтры 26- 28, входами связанные с выходом 22 приемника, а выходами - с шифратором 29, цифровой выход которого связан с входом буферного запоминающего устройства 21. Активные полосовые фильтры 26-28 настраиваются на избирательное пропускание сигналов от соответствующих маяков. На выходах активные полосовые фильтры 26- 28 содержат компараторы (не показаны). Шифратор 29 представляет собой постоянное запоминающее устройство, запрограммированное на преобразование сигналов от активных полосовых фильтров 26-28 в двоичный код.
Цифровой переключатель 24 (фиг.8) содержит одновибратор 30 для формирования управляющих импульсов необходимой длительности, и связанный с ним двоичный счетчик31 импульсов, цифровые выходы которого связаны с приемником 13.
Вычислительное устройство 1 (фиг.9) представляет собой микроЭВМ, содержащую микропроцессор 32, формирователь 33 сигналов управления оперативным запоминающим устройством 34, мультиплексор 35 адресов, постоянное запоминающее устройство 36 операционной системы, блок 37 начального запуска, контроллер 38 прямого доступа к оперативной памяти, контроллер 39 устройства отображения информации, посто- янное запоминающее устройство 40 знакогенератора, блок 41 формирования видеосигнала, формирователь 42 сигнала синхронизации, интерфейс 43 связан с клавиатурой, интерфейс 44 - с внешними устройствами, схему 45 сопряжения, тактовый генератор 46.
Вычислительное устройство 1 построено по схеме с общими шинами адреса 47, данных 48 и управления 49. В предпочтительном варианте исполнения используются микросхемы микропроцессорного набора серии К580, что однозначно определяет связи между ними.
Схема 45 сопряжения (фиг. 10) содержит селекторы-мультиплексоры 50...55, управляющими входами 60.,.63 связанные между собой, с портом А интерфейса 44 связи с внешними устройствами и с адресными входами перепрограммируемого постоянного запоминающего устройства 9. Информационные входы селекторов-мультиплексоров 52...55связаны: 64,..67-сдатчиком бтеоретической скорости трактора, 68...71 - с датчиком 7 положения направляющих колес трактора, 72...75 - с с датчиком 8 бокового крена трактора, 76...79 -с информационными выходами постоянного перепрограммируемого запоминающего устройства 9. Информационные выходы 80...83 селекторов-мультиплексоров 52...55 связаны с портом В интерфейса 44 связи с внешними
0 устройствами. Информационные выходы 84 и 85 селекторов-мультиплексоров 50 и 51 связаны с управляющими входами буферных регистров 56 и 57, связанными через усилители 58 и 59 соответственно с испол5 нительным механизмом 5 управления поворотом направляющих колес трактора и с цифровым регулятором 10. Информационные входы 86...89 буферных регистров 56 и 57 связаны между собой и с портом С интер0 фейса 44 связи с внешними устройствами. Система работает следующим образом. На территории сельскохозяйственного предприятия (или района) в точках с известными координатами располагаются радио5 станции маяков А,В,С (фиг.2). В качестве радиомаяков могут использоваться радиотелефоны внутрихозяйственной связи.
Перед началом движения МТА посредством клавишного устройства 2 ввода
0 оператором вводятся координаты радиомаяков, опорных точек границ поля, и маршрута переезда, ширины поворота захвата агрегата (фиг.З, блок 1). По окончании ввода исходных данных вы5 числительное устройство 1 производит вычисления (фиг.З, блок 2) коэффициентов уравнений прямых АС и ВС, проходящих через радиомаяки А, В, С. расстояний между ними, коэффициентов уравнений границ поля и уравнений отрезков прямых,
0 составляющих маршрут переезда (последнее на фиг.З не показано), угла между прямыми АС и ВС, координат точек PI начала и Р2 окончания и коэффициентов уравнений- траекторий PiP2 первого рабочего прохода,
5 ширины поля и числа рабочих проходов. По окончании расчетов вычислительное устройство 1 посредством устройства 3 отобра- жения информации выдает оператору сообщение о готовности к работе.
0После начала движения МТА вычислительное устройство 1 согласно блоку 3 на фиг.З через буферные запоминающие устройства 21 и 20 вводит информацию от датчиков 17 положения антенн 15 пеленгаторов 11
5 и 12, вычисляет средние значения пеленгов на радиомаяки А, В и С и производит расчет текущих координат МТА. Расчет по блоку 4 на фиг.З содержит определение углов между пеленгами и между пеленгами РВ, РА и
прямыми ВС, СА соответственно, расстояний PC, PB, РА до радиомаяков, коэффициентов уравнений одноименных прямых и точек их пересечения, центра треугольника погрешности. Далее проводится сравнение текущих координат точки Р положения МТА на плоскости поля с координатами точек границ траектории рабочего гона и делается вывод о расположении МТА на поворотной полосе или рабочем гоне согласно блоку 5 на фиг.З.
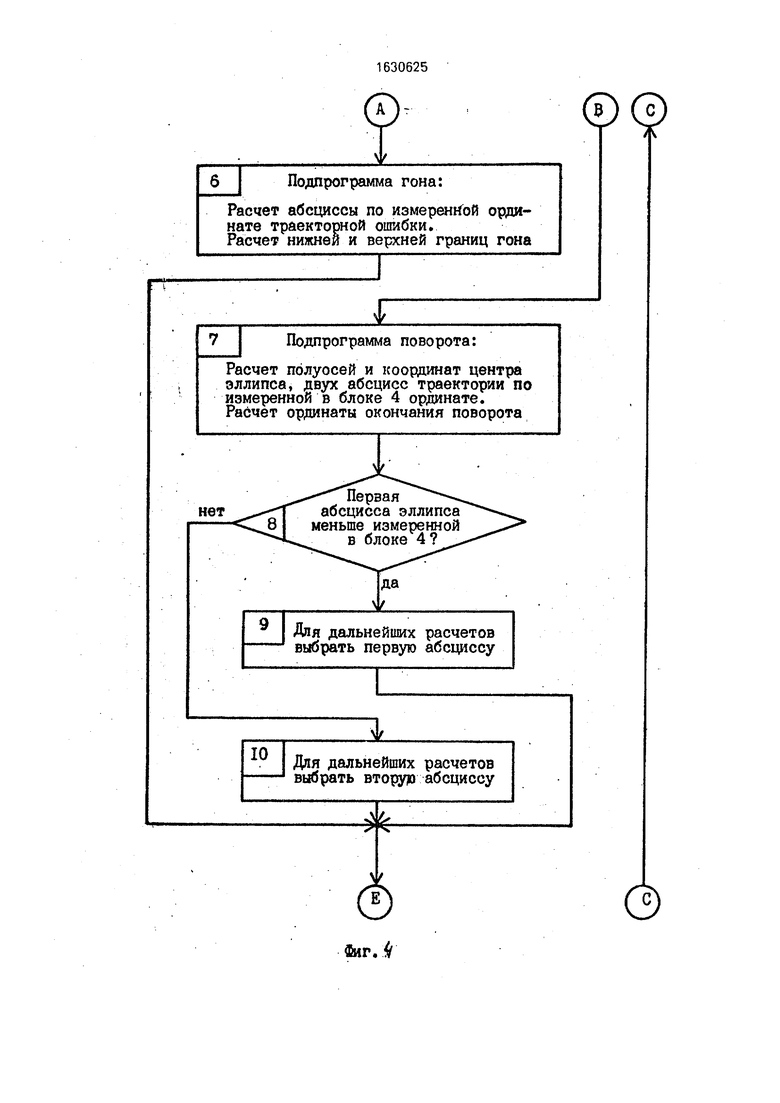
Если МТА находится на рабочем гоне, то по измеренной описанным образом ординате вычислительное устройство 1 рассчитывает абсциссу (фиг.4, блок 6). Затем (фиг.З, блок 11) в вычислительное устройство 1 вводится информация от датчиков бокового крена 8 и положения направляющих колес трактора 7, Согласно блоку 12 фиг.5 производятся вычисления скорости МТА (здесь используется информация о текущих координатах агрегата, подсчитанных за предыдущий цикл обработки программы, и о постоянной времени цикла), траекторной ошибки, выделение абсолютного значения и знака последней.
Результаты вычислений (фиг.5, блок 13) выводятся через порты интерфейса вычислительного устройства 1 на входы исполни- тельного механизма 5 и цифрового регулятора 10 интенсивности управляющего воздействия. Если МТА вышел за пределы рабочего гона и находится на поворотной полосе (фиг.З, блок 5), то начинает реализовываться подпрограмма поворота (фиг.4 блок 7).
В основу алгоритма автовождения МТА на поворотной полосе заложена аппроксимация круговых беспетлевых поворотов уравнением эллипса. В соответствии с указанным вычислительное устройство 1 производит расчет полуосей и координат центра эллипса, двух абсцисс траектории по измеренной и выделенной в блоке 4 ординате. Вычисляется ордината точки окончания поворота.
Затем по блокам 8, 9, и Юфиг. 4 производится анализ вычислительных абсцисс эллипса, выбирается та из двух, рассогласование которой со значением измеренной текущей абсциссы меньше. Вводится информация от датчиков бокового крена 8 и положения направляющих колес трактора 7(фиг.5, блок 11), вычисляются скорость МТА, траекторная ошибка (фиг.5, блок 12), результаты вычислений выводятся: знак траекторной ошибки на исполнительный механизм 5 поворота направляющих колес трактора, а абсолютная ее величина - на вход цифрового регулятора 10 интенсивности управляющего воздействия (фиг.5, блок 13).
Далее проверяется окончание траектории поворота или гона (фиг.5, блок 14). Если выполнение траектории завершено, то реализация программы продолжается с блока 3.
Вычислительное устройство 1 производит расчет коэффициентов уравнения траектории следующего рабочего гона (фиг.5, блок 15) и заносит результаты в ячейки памяти, отведенные для реализации блока 2(фиг.З). Значения
0 координат МТА в ячейках для блока 13 (фиг.5) заменяются на текущие. К числу выполненных рабочих проходов добавляется единица.
Затем анализируется число выполнен5 ных рабочих проходов (фиг.6, блок 16). Если количество выполненных рабочих проходов больше или равно расчетному по блоку 2 (фиг.З), то вычислительное устройство 1 переходит к реализации подпрограммы пере0 езда по блоку 17 (на фиг.6 не раскрыта). Если количество выполненных рабочих проходов меньше рассчитанного по блоку 2 (фиг.З), то вычислительное устройство 1 продолжает реализацию алгоритма с блока 3
5 (фиг.З) описанным образом.
Если в число исходных данных по блоку 1 не включены координаты опорных точек маршрута переезда, то система может функционировать при наличии тракториста в кабине
0 (вариант локальной автоматизации МТА). Если в исходных данных по блоку 1 включены координаты опорных точек маршрута переезда и программа вычислительного устройства 1 содержит алгоритм контроля техниче5 ского состояния машин МТА, технологических параметров, то система может функционировать и без постоянного присутствия тракториста (вариант комплексной автоматизации МТА).
0 Первичный преобразователь4 радионавигационных параметров (фиг.1) работает следующим образом.
Трактор движется по траектории. Антенны 15 посредством исполнительных ме5 ханизмов 16 вращаются в разные стороны, при этом цифровые датчики 17 положения антенны непрерывно измеряют угловое положение последних. Нулевое значение углового положения каждой из антенн 15
0 соответствует положению антенн, в котором они ориентированы параллельно оси трактора и направлены вперед по ходу его движения.
Каждый приемник 13 радиопеленгаторов 11 и 12 всегда настроен на одну из
5 нескольких фиксированных частот. В момент, близкий к максимуму принимаемого радиосигнала от одного из радиомаяков, например А на фиг.2, компаратор 19 выдает сигнал в виде логической единицы на входы буферных запоминающих устройств 20 и 21
и цифрового переключателя 24. Одновременно с этим идентификатор 23 каналов посредством активных полосовых фильтров с компараторными выходами анализирует принимаемый от радиомаяка сигнал, посредством шифратора 29 преобразует логический сигнал в соответствующий двоичный код и выдает последний на вход буферного запоминающего устройства 21.
Буферное запоминающее устройство 20, приняв управляющий сигнал от компаратора 19, запоминает текущее значение углового положения антенны 15 от датчика 17 (прежнее значение сменяется новым) и передает его на вход буферного запоминающего устройства 21. На другие входы последнего одновременно с описанным поступает информация от идентификатора 23.
Управляющий сигнал от компаратора 19 приводит к запоминанию буферным запоминающим устройством 21 одновременно информации об угловом положении антенны 15 посредством датчика 17 положения и об источнике радиосигнала посредством идентификатора 23. Новая информация сменяет прежнюю и считывается соответствующим портом интерфейса 44 связи с клавиатурой по программе, представленной на фиг.3-6.
Цифровой переключатель 24 (фиг.8), получив управляющий сигнал от компаратора 19, формирует посредством одновибра- тора 30 счетный импульс. Последний тотчас поступает на вход счетчика 31 импульсов с заданным коэффициентом деления. Счетчик 31 суммирует поступивший от одновиб- ратора 30 импульс с уже имеющимся их количеством. На выходе счетчика 31 импульсов изменяется двоичный код, что приводит к переключению настройки приемника 13 на следующий частотный диапазон.
Схема 45 сопряжения (фиг. 10) работает следующим образом.
От порта А интерфейса 44 связи с внешними устройствами поступает адрес одного из датчиков 6-8, перепрограммируемого постоянного запоминающего устройства 9, исполнительного механизма 5 или цифрового регулятора 10. Указанный адрес по линиям 60...63 поступает на управляющие входы 60...63 селекторов мультиплексоров 50...55, которые тотчас переключаются для приема информации с соответствующих информационных входов (64...67,68..71,72.„75 или Т6...79). Информация от датчиков по линиям 80...83 подается на порт В интерфейса 44 связи с внешними устройствами.
Если от порта А интерфейса 44 связи с внешними устройствами подается адрес исполнительного механизма 5 или цифрового
регулятора 10, то буферный регистр 56 или 57 получает управляющие сигналы от селектора-мультиплексора 50 или 51 по линиям 84 или 85 и запоминает информацию, поступающую от порта С по линиям 86...89. Введенная информация тотчас поступает через усилители 58 и 59 на входы исполнительного механизма 5 и цифрового регулятора 10. Реализуется процесс управления.
0 Ф о р м у л а и з о б р е т е н и я
5 и устройством отображения информации, связанное с первичным преобразователем радионавигационных параметров, исполнительный механизм управления поворотом направляющих колес трактора, отличающа0 я с я тем, что, с целью повышения точности автовождения, она снабжена цифровым регулятором интенсивности управляющего воздействия, датчиками теоретической скорости, положения направляющих колес и бо5 кового крена трактора, подключенными к входам вычислительного устройства, постоянным запоминающим устройством,информационные выходы которого подключены к входу вычислительного устройства, а управ0 ляющие входы - к выходу последнего, причем исполнительный механизм управления поворотом направляющих колес электрическим входом подключен к выходу вычислительного устройства, а гидравлическим - к цифровому
5 регулятору интенсивности управляющего воздействия, связанному с гидросистемой трактора и с выходом вычислительного устройства.
5 подключена антенна направленного действия, механически связанная с исполнительным механизмом и датчиком положения антенны направленного действия, к основному выходу через компаратор подключены два буферных
0 запоминающихустройства, при этом первое из них вторым входом связано с датчиком положения антенны направленного действия, а к дополнительному выходу приемника через идентификатор каналов подключено второе
5 буферное запоминающее устройство, второй вход которого связан с выходом первого буферного устройства, а выход - с вычислительным устройством, причем выход компаратора через цифровой переключатель связан с дополнительным входом приемника .
В(Ш
М(1,2)
О
1 2 J 4 5 6
С(12,13)
А (1Ы)
789 Фиг.2
Ю 11 12 13 /4
Ввод исходных данных:
координат радиомаяков, опору /ных точек границ поля и маршрута переезда; ширины поворота и ширины захвата агрегата
JJ
Вычисления до начала движения:
Расчет коэффициентов прямых, проходящих через радио- иаяки, и расстояний между последними, границ поля, маршрута переезда, угла между прямыми АС и ВС, начала, окончания и коэффициентов уравнения траектории перврго рабочего прохода, ширины поля и числа рабочих проходов
Ввод информации от пеленгаторов (после начала движения МТА)
4I Определение текущих координат МТА:
расчет углов «X и - между пеленгами, V и У между пеленгами РВ, РА и прямыми ВС, АС соответственно, расстояний PC, РВ, РА до радиомаяков, коэффициентов уравнений одноименных прямых и точек их пересечения, центра треугольника погрешности
Г Начало j
Подпрограмма гона:
Расчет абсциссы по измеренной ординате траекторией ошибки. Расчет нижней и верхней границ гона
Подпрограмма поворота:
Расчет полуосей и координат центра эллипса, двух абсцисс траектории по измеренной в блоке 4 ординате. Расчет ординаты окончания поворота
нет
Фиг. #
А
0
II
НВвод информации от датчиков бокового крена и положения вправляющих колес трактора
12
Вычисление:
скорости МТА по текущим координатам, подсчитанным за предыдущий цикл, и времени цикла, траекторной ошибки, выделение абсолютного значения и знака последней
13 I Вывод:
на исполнительный механизм знака, а на регулятор интенсивности управляющего воздействия - абсолютной величины траекторной ошибки
оворот или ГОР окончены
15
Подсчитать:
коэффициенты уравнения траектории следующего рабочего гона и записать их в ячейки блока 2. Заменить в ячейках блока 13 значения координат МТА предыдущих на текущие. К числу выполненных рабочих проходов добавить единицу
нет
-
22
Я
Фиг. 7
Г
19
24
25
Фиг. 8
И
| Малорацкий А.Г | |||
| Радиоэлектронные системы ближней навигации для автовождения МТА.- Механизация и электрификация сельского хозяйства, 1985, №4, с.25-27. |
