-OD
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования напряжения синхронных и асинхронных генераторов | 1988 |
|
SU1508312A1 |
| Способ регулирования возбуждения синхронного генератора | 1990 |
|
SU1772870A2 |
| Способ регулирования возбуждения синхронного генератора | 1987 |
|
SU1508311A1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1989 |
|
SU1617531A1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1990 |
|
SU1741223A2 |
| Способ автоматического регулирования возбуждения синхронного генератора и устройство для его осуществления | 1979 |
|
SU858198A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ГЕНЕРАТОРА | 1972 |
|
SU335775A1 |
| Способ управления электрической станцией, содержащей асинхронный генератор и источник реактивной мощности | 1991 |
|
SU1815735A1 |
| Способ автоматического ограничения режимов синхронной машины и устройство для его осуществления | 1981 |
|
SU991576A1 |
| Устройство для автоматического управления возбуждением синхронного генератора | 1987 |
|
SU1503056A1 |
Изобретение относится к элект роте.х- нпке и .может быть использо ано в автома- тнчесгчих регуляторах во.-1буждения (.ЛРВ) снн.хронного генератора ((-Г) при совместной установке его на электрической станции с асин.хронным генератором (АГ). Цель изобретения - повышение пределов статичес кой и динамической устойчивости и качества нере.ходного процесса электрической системы при совместной работе син.хронных и асинхронных генераторов. Для этого измеряют отклонение скольжения АГ от номинального и изменяют токи возбуждения СГ в зависимости от изменения режимных параметров и отклонения скольжения АГ. В процессе работы генераторов датчики 2 скорости АГ 1 измерят величину напряжения опреде,1яю- :цими оборотами врапгения ротора АГ и передают информацию об этом через согласующий элемент 3 в реп1аю1ций блок 4. Рен1аюн1ий блок 4 по заложенному в него закону определяет и передает сигналы к системе .АРБ 5 синхронного генератора 6. В результате полученный сигнал от скольже1П1Я АГ в,тияет на суммарное изменение значения тока возбуждения СГ. 1 ил. « сл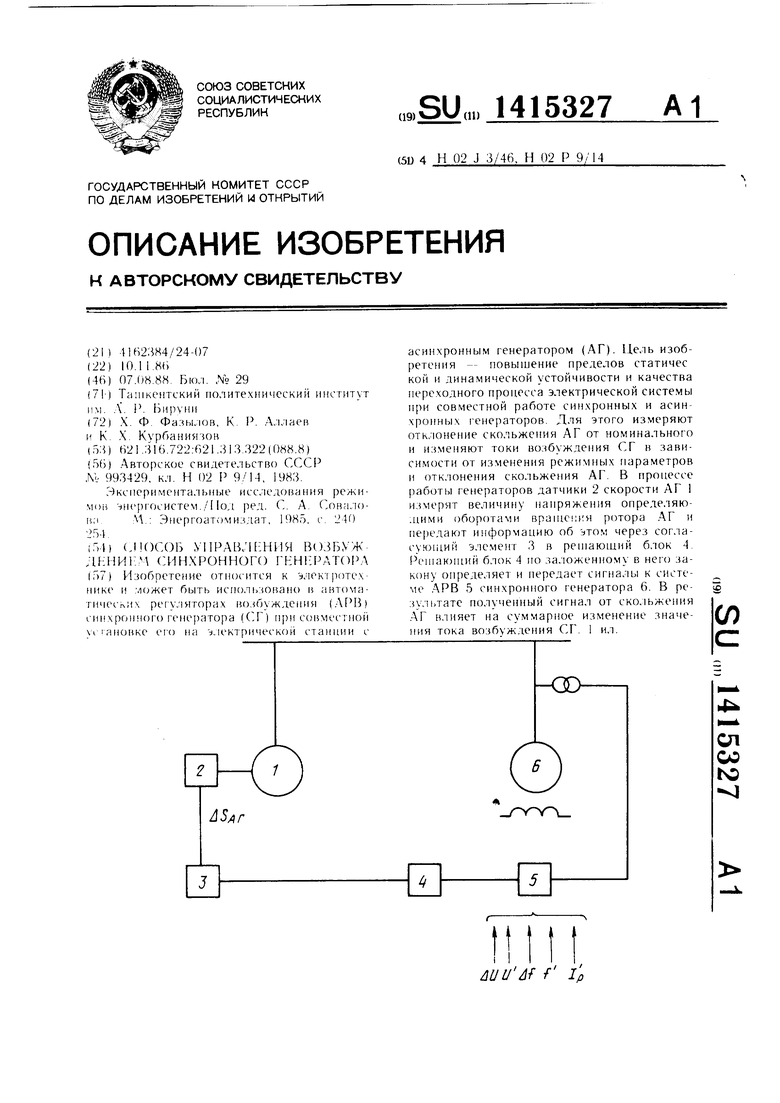
ASAr
ел
со
NS
f IP
Изобретение относится к :1,1екг11()те.хнике и может быть 11сно,-1ь;ювано is автоматических регуляторах возбуждения (АРВ) синхронного генератора при совместной установке ei o с асинхронным генератором в электрических станциях.
Цель изобретения повышение пределов статической и динамической устойчивости и качества переходного процесса электрической системы при совместной работе синхронных и асинхронных генераторов.
На чертеже приведена блок-схема устройства, реализующего предлагаемый способ.
На асинхронном генераторе 1 установлен датчик 2 скорости, выходы которого подключены к согласующему элементу 3. Согласующий элемент 3 подключен к ре1паю1цему блоку 4, выход которо1Ч) подключен к системе 5 синхронного генератора 6.
В качестве регулируемых параметров на современных АРВ используются отклонение и первые производные напряжения, отклонение и первые производные частоты этою напряжения и первые п)оизводные тока возбуждения синхронного генератора. Л1ате- матически эго можно описать с;1едукмцим образом
К
i: ,« -- i: + ,Ai + H-pT:u
K,f j-i Kjp .
l+pTi;1+PTlp
r.
All.U ,f,fM,,
ш -Кlu ,К,.г,КII,К,р
T|k, Tj;, Г, р
отклоните напряжения обмотки возбуж дения )нно1() генератора;
отклонение напряжения, скорости из.мене- ния напряжения, отклонение и производная частоты этс)|-о напряжения, П)ОИЗВОД- ная тока возбуждения синхронною 1 епе- ратора;
соответствую nine коэффициенты усиления; постоя1П)ые времени соответственно по каналам производных напряжения, частоты и тока возбуждения, оператор.
Оснащение синхронных генераторов такими ЛРВ повьинает устойчивость работы и улуч1пает демпфирование пе)еходпых процессов, когда на станции работают lo.ibKO синхронные генераторы.
При совместной работе на станции син- )опных и асинхронных генераторов п|)е.че- . 1Ы по статической устойчивости не:;начитель- но уменьп1аются. Для устранения отмеченно го факта необходимо испо.пьзова гь прежде Bcei4J сам асинхропп1 1Й генератор. В принципе ток возбуждения синхронного генератора можно регулировать в зависимости от любого режимного параметра элементов электрической системы. Например, можно предложить метод дополнительного регулирования тока возбуждения синхронного генератора в функции режимных параметров асинхронного генератора. В качестве такого параметра предложено использовать скольжение асинхронного генератора (Su,), так
0 как скольжение является комплексным параметром асинхронного генератора, зависящим от электрических, магнитных и механических свойств рассматриваемой .. По этой причине регулирования тока возбуждения синхронного Г енератора ггри совместной работе с асинхрслшым генератором но скольженггю асинхронного генератора да ет наибо.тее желаемый эффект с точки зрения увеличения ггределов статической и динамической устойчивости и качества нереход0 ного процесса электрической системы. Нри этом математическое описание уравнения регулятора имеет следующий вид
,ii, к,„ .ли-К t-u
1+p Tit,
иЧк,
г I-p I , , -T- inT iVo - АГ .
1 -p I I,1 +pli p
где AS,p отклонение скольжения асинхронного генератора; KOS коэффициент усиления этого кана. 1а.
Таким образом, при совместной работе на станции синхронного и асинхронного генераторов предлагается вводить дополнительный канал в систему .ЛРВ синхронного
с генераторапо отклонению скольжения
асинхронного генератора. В результате по.чу- ченный сигнал от отклонения ско.чьжения асинхронного генератора влияет па суммарное изменение значения тока возбуждения )нного генератора. Нри этом уве;1иче ние скольжения увеличивает, а уменьшение соответственно уменьншет значение тока возбуждения синхронного генератора.
Этот процесс происходит следующим образом.
гв процессе работы генераторов датчик 2
скорости, установленный на ось ротора асинхронного г енератора 1. из.меряет ве.ж- чину нан)яжения определяющими оборотами вращения ротора асинхронного ене)а- гора и полученный си1 на; в виде постоям
Q Fior O напряжения. п|)ОГ1Орционального ско- юсти вращения ротора at HHXpOH}ior(j гене- рато)а, передается через сог ласующий эле- мен 3 в рен1ак)П1ИЙ блок 4. В качестве да i- чика скорости можно испо-льзовать Taxoi C- нераторы, а в качестве согмасующего э,е5 мента 3 усилите. щ постоянного напряжения. В данном с.|учае датчик скоросги с.чх- жи г ;|.. 1Я онредс.1ения CKOPOCIH вра1П( ротора асинхронного генератора в виде но
стояныок) напряжения, пропорционального скорости вращения ротора асинхронного генератора, а согласующие элементы служат для согласования величины напряжения на выходе датчиков 2 с входом решающего блока 4.
В ре1лаюн1ем блоке 4 по заложенному в него закону формируется сигнал и поступает к одному из входов сумматора АРВ 5 синхронного генератора 6. В данном случае в решающий блок 4 заложен 3aKOfi регулиро- вания по отклонению скольжения асинхрон- ног О генератора от ei O номинального значения (Л8лг 8Аг Здгр ). т. с. сигнал, поступающий от асинхронного генератора в виде постоянного напряжения, сравнивается с опорным напряжением (в качестве опорного взято напряжение, пропорциональное номинальному скольжения асинхронного генератора) и полученный сигна,1 поступает к одному из входов сумматора АРВ 5 синхронного генератора 6. Ко всем остальным вхо- дам сумматора АРВ 5 синхронного генератора 6, поступают сигналы по параметрам режима станции и синхронного генератора - по выбранным параметрам режима. В результате полученный сигна.1 от откло- нения скольжения асинхронного генератора влияет на суммарное изменение значения тока возбуждения синхронного генератора. Увеличение скольжения увеличивает, а умень- п|ение соответственно уменьшает значение тока возбуждения синхрони()10 генератора.
Количество асинхронных г енераторов, ус- танавлииаемых на э.лектрической станции при их совместной работе с синхронными генераторами цо условиям новьпиения пределов статической и динамической устойчивости, качество переходного процесса, а так- же улучшение технико-экономических показателей системы должг{о быть до 50% от установленной мощности станции. Конкрет5
0 5 0
5
ное количество асинхронных генераторов определяется, исходя из реально работающего количества синхронных генераторов в данный мо.мент, мощности нагрузки, к,пасса и дальности линии электропередачи, скоммути- рованной на шине данной станции, а также ее режима напряжения. При совместной работе синхронных и асинхронных генераторов используются стандартные АРВ про11О(тиональ- ного и си,льного действия с доцолните, ным каналом, реагирующи.м на отклонение скольжения асинхронного генератора.
Таким образом, предлагаемый способ управления возбуждением синхронного генератора обеспечивает согласованное изменение тока возбуждения синхронного генератора в соответствии с из.менением скольжения асинхронного генератора, повышая статическую и динамическую устойчивости и качество переходного процесса электрических систем.
Формула изобретения
Способ управления возбуждением синхронного генератора, работающего в энергосистеме, состоящий в том, что измеряют режимные параметры генераторов и изменяют токи возбуждения синх)онных генераторов и из.меняют токи возбуждения синх)он- ных генераторов в зависимости от изменения режи.мных царамет(Н)в Г енератора. отличающийся те.м, что, с це. 1ьк) повышения пределов статической и динамической устойчивости и качества переходного п)оцес- са электрической системы при совместно ia6()ie синхронных и асинхронных генераторов на станции, из.меряют отклонение ско.ль- жения асинхронног о |-енератора от номинального и сч ммируют с вьппеупомянутьгм сигналом воздействия на ток возбуждения синхронного ге}1ератора.
| Способ автоматического регулирования возбуждения синхронного генератора и устройство для осуществления этого способа | 1981 |
|
SU993429A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| С | |||
| А | |||
| С)нало- и;|Л.: Эиергоатомиздат, 1985 | |||
| с | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
