UrstifipCTe line (чтиоситсч к 1лектро- технике и мижет 1)ьггь нспользоилио в npuHcvie по/1ачи выемочных маип1н, при- ЦОДР. Г1ереме1це 1ня грузс1В, краистых тележек, т.е., там, где возможно перемещение под уклон с торможением.
Цел изобретения - повьшгеиие энер гетических показателен электропривода и эффективности торможения.
На чертеже представлена функциональная схема частотно-регулируемого электропривода перемещения.
Частотно-регулируемый электропривод содержит асинхронный электродвигатель 1, последовательно соединенные управляемый выпрямитель 2, присо- единенныГ к сети 3, ЬС-ф1шьтр 4, автономный инвертор 5 напряжения, блок 6 управления, подключенный выходом к управляемому вьпфямителю 2, блок 7 управления, подключенньш выходом к автономному инвертору 5 напряжения, блок 8 задания скорости подачи и тормозного момента , первый выход которого подключен к входам блоков 6 и 7 управления выпрямителем и ав- TOHOMFibiM инпертором напряжения, элек тромагнитный тормоз 9, блок 10 коммутации. Кроме того, в электропривод введены управляемый ключ 11, блок 12 торможент я, выпрямитель 13, датчик 14 генераторного торможения электродвигателя, датчик 15 тока, логн геска схема И 16, датчик 17 контроля ис- пользования емкости LC-фильтра, логи ческая схема ШБ-1 18. При этом последовательно соединенный yпpaвляe ый ключ 11, датчик 15 тока и электромагнитный тормоз 9 через блок 10 тации подключен к емкости LC-фнльтра 4 и выходу выпрямителя 13, присоединенного входом к сети 3, К первому и втогс му входам бло1са 12 торможения подсоединены, соответственно, второй выход блока 8 задания скорости подачи и тормозного момента и выход датчика 15 тока, Лервьм и второй выходы блока 12 торможения под.клю11ень, соответственно., к -правлякидему входу управляемого ключа 11 и входу датчик 17 контроля использования конденсатора LC-фильтра 4, выход которого подключен к первому входу логической схемы И-16 через элемент ИЛИ 18. Выход логической cxeNfti И 16 подключен к управляю цему входу блока 10 коммутации и BTLipoMy входу логкческой схемы ИЛИ 18, а выхо;.1 датчика 1А генера
0
5
0
0
r 0 5
.0
5
торного торможения г.чектродгип-ателя присоединен к второму логичес- Koi i схемы И 16 и третьему входу блока 12 торможения.
Блок 12 торможения содержит последовательно соединошгые элемент 19 сравнения, регулятор 20 тока, ишрот- но-импульсный модулятор 21, логическую схему И 22, выход которой присоединен к первому выходу блока-12 торможения, при этом первый и второй входы элемента 19 сравнения образуют соответственно первый и второй входы блока 12 торможения, а третий вход блока 12 торможения образован вторым входом логцт.еской схемы И 22. В,ход регулятора 20 тока является вторым выходом блока 12 торможения.
Датчик 14 генераторного торможе- чия электродвигателя,включает датчик 23 электромагнит)юй мощности электродвигателя, датчик 24 полярности тока LC-фильтра 4, логическую схему И 25, при этом выходы датчиков 23 и 24 электромагнитной мощности электродвигателя и полярности тока LC- Фяпьтра присоединены соответственно к первому и второму входу логической схемы И 25, выход которой является выходом датчика 14 генераторного торможения с
Датчик 17 контроля использования конденсатора LC-4)ильтpa 4 включает элемент 26 сравнения, источник 27 опорного сигнала, пороговый элемент 28, при этом первый вход элемента 26 сравнения подключен к выходу источника 27 опорного сигнала, а второй вход элемента 26 сравнения является входом датчика 17, а выход элемента 26 сравнения соединен с входом порогового элемента 28, выход которого образует выход датчика 17 контроля использования кон,денсатора LC- Ьильт- ра.
Блок 10 коммутации включает последовательно соединенные управляемьш ключ 29, реле 30, подключенные к ис.- точлику 31 постояннох о напряжения. Реле 30 имеет двп переключателя 32 и 33 на два положения. К подвижным контактам перекль ателей 32 и 33 подключены последовательно соединенные клю 11 J датчик 15 тока, электромаг- Ш1ТНЫЙ тормоз 9. К размт.жающим контактам переключателей 32 и 33 под- клнлен конденсатор Т,С-1 цльтра 4, а к заь-. канкцим контактам переклк- ате314
лей 32 и 33 - выход выпрямителя 13. Управляюисий вход блока 10 коммутации образован управляющим входом ключа 29.
Электропривод работает следующим образом
В двигательном режиме блок 8 за- да1шя скорости и момента торможения вьщает задающий сигнал скорости перемещения в блок 6 управления выпрямителем 2 и в блок.7 управления инвертором 5, которые определяют величину напряжения и его частоту на выходе инвертора или на статоре двигателя. При изменении сигнала задания изменяется частота вращения электродвигателя и скорость перемещения механизма, который через редуктор связан с ротором электродвигателя. Так как электродвигатель работает в двигательном режиме, то на выходе датчика 14 (или выходе схемы И 25) генераторного торможения появляется нулевой сигнал, который поступает на второй вход схемы И 16 и на второй вход схемы И 22 блока 12 торможения.
Сигнал с выхода широтно-импульс- ного модулятора 21 не поступает на вход управляемого ключа 11, он зак- рьп. В цепи электромагнитного тормоза, присоединенного, через блок 10 коммутации к конденсатору LC-фильтра 4, ток не протекает и тормозного момента не создается. Управляемый ключ 29 блока коммутации закрыт и реле 30 не срабатывает.
Когда частота вращения механизма и ротора электродвигателя 1 под дейсвием активного момента становится больше частоты вращения магнитного поля статора электродвигателя 1 (движение под действием составляющей силы тяжести под уклон для выемочного комбайна или тележки перемещения) кинетическая энергия вращающихся масс передается через инвертор 5 в конденсатор фильтра 4, ток в звене постоянного тока меняет свое направление, и напряжение на конденсаторе фильтра 4 повьппается,
В этом случае датчик 14 выдает на выходе сигнал 1 (на выходе схемы И 25 появляется единичный уровень напряжения, так как датчик 24 полярности тока вьщает сигнал 1, реагируя на смену направления тока, и датчик 23 электромагнитной мощности вы2 .
дает сигнал 1, соответствующей отрицательной электромагнитной мощности электродвигателя - переход электродвигателя 1 в генераторный режим), который поступает на вторые входы логической схемы И 16 и логической схемы И 22, находящейся в блоке 12 торможения. На вход последнего (первый вход элемента 19 сравнения) поступает сигнал задания тормозного момента с блока 8, который через регулятор 20, широтно-импупьсный модулятор 21 и логическую схему И 22 поступает на управляющий вход ключа 11. Последний открывается и закрывается в соответствии со скважностью импульсов управления или коэффициентом за- полнения.
Так как электромагнитный тормоз 9 с помощью ключа 11 через блок 10 коммутации подключается к конденсатору фильтра 4, то в цепи электро-
магнитного тормоза протекает ток, создающий тормозной момент Ток в цепи тормоза измеряется датчиком 15 и подается на второй вход элемента 19 сравнения Регулятор 20 через мо-
дулятор 21 изменяет скважность импульсов управления ключа 11 таким образом, чтобы ток в цепи электромагнитного тормоза 9 создал заданный тормозной момент. Регулятор 20 является пропорционально-интегральным регулятором, поэтому сигнал на его выходе пропорционален заданной величине тормозного момента и заданию скважности модулятора 21 Последний преобразует аналоговый сигнал на выходе регулятора 20 в импульсы переменной скважности, поступающие на вход ключа 11 Таким образом, блок 12 торможения представляет собой
астатическую систему регулирования тока в цепи электромагнитного тормоза 9. Так как напряжение на конденсаторе фильтра 4 меняется, в зависимости от частоты вращения двигателя
и интенсивности торможения, то заданной величине тормозного момента соответствуют разные величины скважности импульсов на выходе модулятора. При определенной, низкой величине
напряжения на емкости фильтра 4, может оказаться, что даже при максимальной скважности импульсов регулятор не обеспечит заданного значения тока черзе тормоз 9.
5
Этому pe 3iNfy соответствует макси мальньй уровень напряжения на выход регулятора 20, который поступает на первый вход элемента 26 сравнения датчика 17 контроля использования конденсатора фильтра 4, На другой вход элемента 26 поступает сигнал с выхода источника 27 опорного сигнала, соответствующий в масштабе мак
симальной скважности импульсов модулятора 21. Когда напряжения с фильтра 4 недостаточно для создания заданного тормозного момента (низкие частоты вращения и соответствующие им низкие значения напряжения), сигнал на выходе регулятора 20 тока максимален и превышает сигнал с источника 27 опорного напряжения, на выходе элемента 26 появляется положительный сигнал, подаваемый на пороговый элемент 28, Последний вьщает сигнал, который через первый вход элемента ИШ 18 поступает на первый вход схемы И 16, и так как на втором ее входе имеется единичный сигнал с датчика 14, соответствующий режиму генераторного торможения, то с выхода элемента И 16 поступает сигнал на управляющий вход ключа 29 блока 10 коммутации. Ключ 29 открывается и реле 30, получая питание от источника 31, срабатываеТо Переключающие контакты реле 30 переключают электромагнитный тормоз 9 к выпрямителю 13.
Сигнал с выхода элемента И 16 поступает также на второй вход схемы Rrttl 18, блокируя сигнал по первому его входуо Так как напряжение выпря- .мителя 13 не зависит от частоты вращения электродвигателя 1, то блок 12 торможения обеспечивает отработку заданного значения тормозного момента независимо от напряжения на конденсаторе фильтра 4 при низких частотах вращения.
Если электропривод переходит в двигательньш режим, то на выходе датчика 14 генераторного торможения (выходе cxei tbt И 25) появляется нулевой сигнал, который обеспечивает нулевой сигнал на выходах логических схем И 22 и 16о В результате импульсы управления с модулятора 21 не проходят на управляющий вход ключа 11, и он закрывается. Ключ 29 блока 10 та1щи также закроется, реле 30 отпадет, переключающие контакты 32 и 33 будут в исходном положении.
0
5
В случае перехода электропривода в генераторный режим электропривод работает как описано,
В предлагаемом электроприводе обеспечивается экономия энергии, так как кинетическая энергия вращающихся масс, запасенная в электрическом поле конденсатора фильтра, полностью используется для создания тормозного момента с помощью электромагнитного тормоза. Это обеспечивается за счет подключения электромагнитного тормоза непосредственно к конденсатору 5 фильтра о
За счет автоматического присоединения электромагнитного тормоза либо к фильтру, либо к выпрямителю обеспечивается эффективное торможение электродвигателя на любых частотах вращения и в длительном режиме работы.
Кроме того, обеспечивается возможность создания заданного тормозного момента, когда ротор электродвигателя не вращается, за счет присоединения электромагнитного тормоза к вьт- рямителю. Возможно поддержание заданного тормозного момента с любой точностью за счет применения ключа и блока торможения с широтно-импульс- ным регулированием Переход электродвигателя в тормозной режим с питанием электромагнитного тормоза либо от напряжения конденсатора фильтра, либо от выпрямителя происходит автоматически за счет введения датчиков генераторного режима, датчика контроля использования конденсатора фильтра и соединения логических схем И и ИЛИ.
Таким образрм, предлагаемый электропривод обеспечивает полезное использование кинетической энергии вращаннцихся масс для создания тормозного момента, за счет чего улучшаются его энергетические показатели, и повышение эффективности торможения за счет обеспечения надежных тормоз- ньгх моментов в длительном режиме торможения при любых частотах вращения - и при остановке
Формула изобретения
0
5
0
5
0
1. Частотно-регулируемый электро- привод перемещения, содержащий асинхронный электродвигатель, последовательно соединенные управляемый выпрямитель, LC-фильтр, автономный инвертор напряжения, подключенный к
71
асинхронному электродвш-а-т-ешо, управления укачан11ым выпрямителем блок управления автономным инвертором напряжения, блок задания скс рос- ти подачи и тормозного момента, первый выход которого под :л 0 Чен к нхо- дам блока управления выпрямителем и автономным инвертором напряжения, электромагнитный тормоз, блок коммутации, отличающийся тем, что, с целью повьпления энерге- птческих показателей и эффективности торможения электропривода, введены управляемый ключ, блок торможения, выпрямитель, датчик генераторного торможения электрО1.виптеляJ датчик тока, логическая схема И, датчик контроля использования конденсатора LC-фильтра, логическая схема ИЛИ, при этом упрарляе№1Й датчик тока и электромагнитный тормоз соединены последовательно н через блок коммутации подключены к ковденсатору LC-фильтра и выходу вьт рямителя, вход которого снабжен выводами для подключения к сети к первому и второму входам блок:-, торможения подключены соответстяеннп второй выход блока задания скорости подачи и тормозного момента я выход датчика тока, а первый и второй выходы блока торможения подключень; соответственно к yпpaвляющe ry входу управляемого ключа и входу J aтчикa контроля использования конденсатора LC-фильтра, выход которого подключен к первого входу логической схемы ИЛИ, выходом соединенной с первым входом логической схемы И, выход которой подключен к управляющему входу блока коммута1цти и второму входу логической схемы ШШ, а выход датчика генераторного торможенич электт)одвигателя подклточен к второ ту
0
5
0
5
0
53928
( Ду лс.гической И и третьем входу блока торможения,
2,Электропривод по п.1, о т- л и ч а ю 1Ц и и с я тем, что, блок торможения снабжен последовательно соединенными элементом сравнения, регулятором тока, ш1фотно-импульсным модулятором, логической схемой И, выход которой образует первьп1 выход блока торможения, первый и второй входы элемента сравнения - первый и pTopoii входы блока торможения, а тре- вход блока торможения образован вторьгм входом логической схемы И, выход регулятора тока соединен с вторым выходом блока торможения.
3,Электропривод по п,1, о т л и- чающийся тем, что датчик генераторного торможения электродвигателя составлен из датчика электромагнитной мощности электродвигателя, датчика полярности тока LC-фильтра, логической схемы И, при этом выходы датчиков электромагнитной мощности электродвигателя и полярности тока LC-фильтра подключены соответственно к первому и второму входам третьей логической схемы II, выход которой является выходом датчика генераторного торможения.
4,Электропривод по п.1, о т л и- ч а ю д и и с я тем, что датчик контроля использования ко1зденсатора LC- фильтра содержит элемент сравне1шя, источник опорного сигнала, пороговьпЧ элемент, при этом первый вход второго элемента сравнения подключен к выходу источника опорного сигнала, второй вход элемента сравнения образует вход датчика, а выход элемента срав нения подключен к входу порогового элемента, которого образует выход датчика ко1 троля использования конденсатора LC-фильтра,
5
0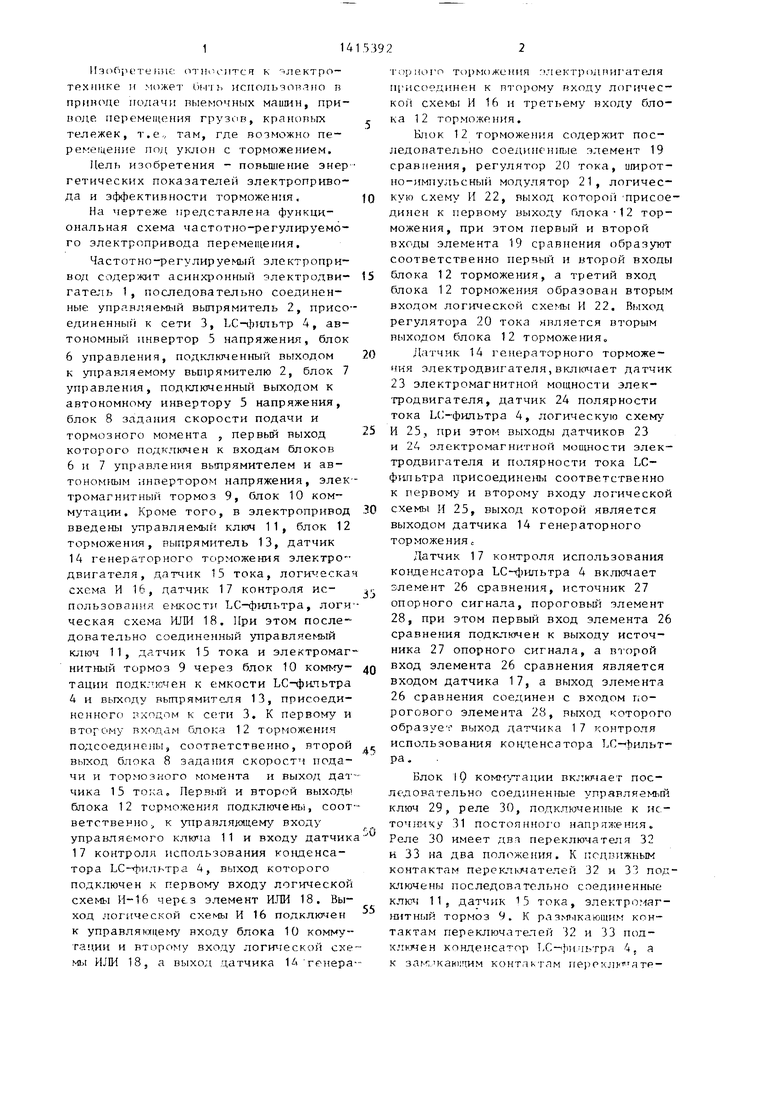
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
| Электропривод постоянного тока | 1985 |
|
SU1275727A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1418882A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Устройство для автоматического управления асинхронным электродвигателем в режиме рекуперативного торможения | 1990 |
|
SU1782332A3 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
Изобретение относится к электро технике. Целью изобретения является поБыпение энергетических показателей , и эффективности торможения. Цель достигается введением в частотно-регулируемый электропривод перемещения III последовательно соединенных с элек- тромагнитным тормозом 9 управляемого ключа 11, датчика тока 15, подключенных через блок комм1 тации 10 к выпрямителю 13 сети 3. В электропривод введены также блок торможения 12 для управления ключом 11, датчик генераторного торможения 14 и датчик 17 контроля использования конденсатора LC-фильтра 4, cxeMiii И 16 и схемы ИЛИ 18. При частоте вращения ротора двигателя 1 больше частоты вращения магнитного поля его статора кинетическая энергия вращающихся масс через инвертор 5 накапливается в конденсаторе LC-фильтра 4 и введенные блоки обеспечивают подключение электромагнитного тормоза 9 к конденсатору LC-филътра 4, который обеспечивает регулируемый тормозной момент. 3 з.п. ф-лы, 1 ил. i сл ел со со го
| Частотно-регулируемый электропривод | 1977 |
|
SU748751A1 |
| Электропривод | 1977 |
|
SU640410A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
