Л
рие.2
Изобретение относится к медицине и может быть использовано при лечении и профилактике заболеваний позвоночника при подводном вытяжении.
Целью изобретения является обеспе- чени.е последовательных установки и контроля параметров процесса программного циклического вытяжения.
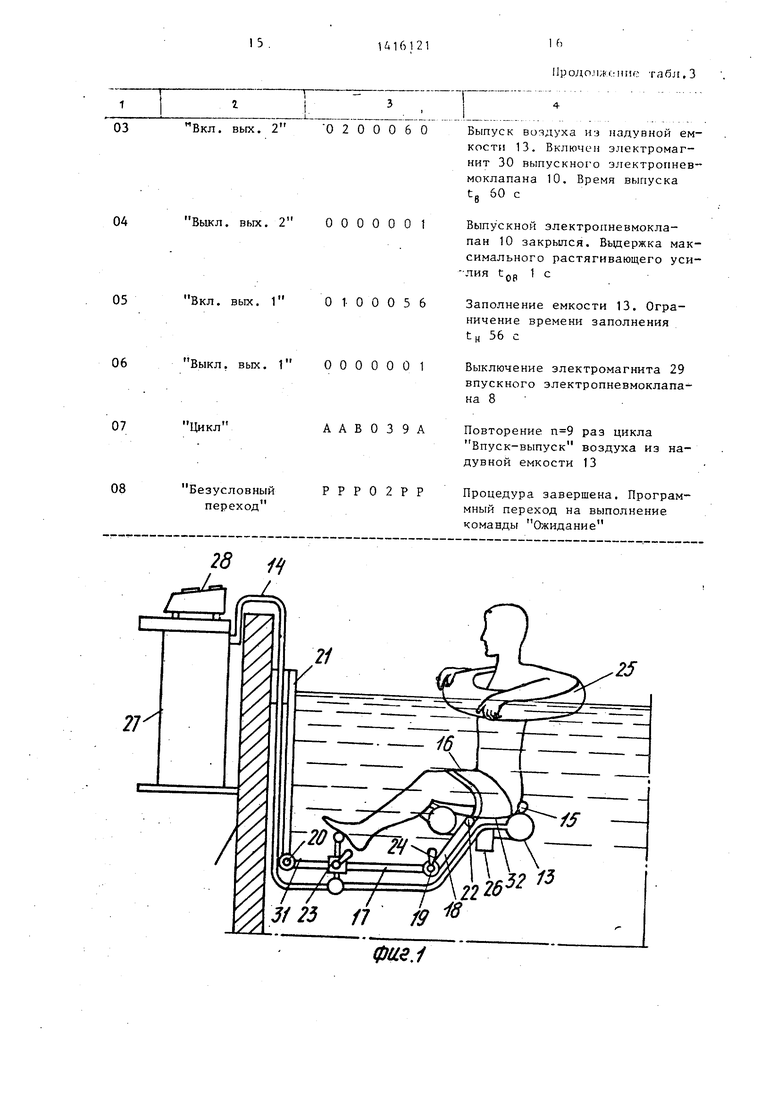
На фиг. 1 изображено устройство, общий вид; на Фиг. 2 - пневмосистема нагрузочного механизма; на фиг. 3 - блок-схема системы управления устройством для подводного вытяжения позвоночника; на фиг. 4 - схема электричес ких соединений системы управления устройством для подводного вытяжения позвоночника; на фиг. 5 - принципиальная электрическая схема микропро- цессорного блока системы управления; |ja фиг. 6 - принципиальная электричес кая схема формироватепя тактирующих сигналов микропроцессора К 145 ИК 1908; на фиг. 7 - принципиальная электрическая схема источника элект- ропитания микропроцессорного блока;- на фиг. 8 - принципиальная электрическая схема блока выходных преобразователей; на фиг. 9 - принципиальная электрическая схема блока электро- пневмоклапанов; на фиг. 10 - формат команд входного языка микропроцессора К 145 ИК 1908; на фиг. 11 - блок- схема алгоритма управляющей программы устройства для подводного вытяже- ния позвоночника; на фиг. 12 - кон- ;струкдаи датчиков нагрузки и поло- жения, а также выполнение надувной -емкости в виде поДводного колокола.
Устройство для подводного вытяже- ния позвоночника содержит пневмосис- тему нагрузочного механизма, включающую соединенные последовательно воздухосборник 1, компрессор 2, фильтр- влагоотделитель 3, ресивер 4, с пре- дохранительным клапаном 5, регулятор 6 давления, дроссель 7, впускной электропневмоклапан 8, тройник 9, вьшускной электропневмоклапан 10, дроссель 11, глушитель 12, причем третий выход тройника 9 соединен с надувной емкостью 13, а соединения между элементами пневмосистемы вьшолне- ны трубопроводом 14,
Пневмосистема является частью нагрузочного механизма. Устройство так же содержит элементы крепления пациента в виде сиденья 15 с тазовым поясом 16, первой 17 и второй 18
распорок, шарниром 19 соединенных между собой. Причем первая распорка 17 шарниром 20 соединена с кронштейном 21, а вторая распорка 18 шарниром. 22 соединена с сиденьем 15.;
На первой распорке 17 с возможностью перемещения установлен фиксируемый упор для ног 23. Шарнир 19 снабжен фиксатором 24, который обеспечивает фиксацию распорок 17 и 18 для задания удобной позы пациента. К элементам крепления относится также грудная пневмокамера 25, одеваемая через руки на плечи больного.
К сиденью 15 прикреплен груз 26, а также надувная пневмокамера 13.
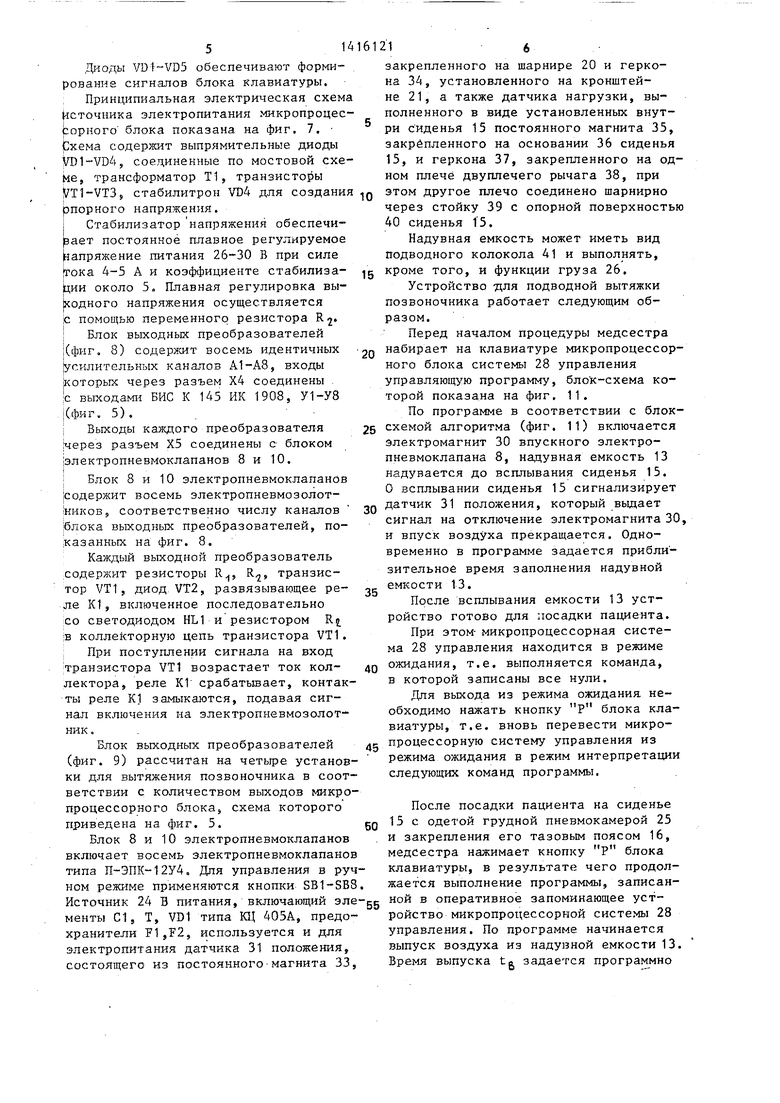
Блок 27 управления с контрольно- измерительной аппаратурой (не показаны) содержит микропроцессорную систему 28 управления, построенную по принципу временного и логического управления, выходы которой соединены с электромагнитами 29 и 30 впускного 8 и выпускного 10 электропневмоклапа- нов, а входы соединены с датчиком 31 положения и с датчиком 32 нагрузки.
Порядок и продолжительность всех этапов процесса вытяжения позвоночника, контроль и управление ими осуществляет микропроцессорная система 28 управления.
Более.полное представление о принципиальной электрической схеме блока 27 управления дает схема электричес- ких соединений системы управления устройством для подводного вытяжения позвоночника, приведенная на фиг.4. Из схемы виден состав и способ соеди нения конструктивных элементов микропроцессорной системы 28 управления с блоком электропневмоклапанов и датчиками 31 и 32.
Микропроцессорная система 28 управления (см. фиг. 4)конструктивно включает микропроцессорный блок А1, блок А2 выходных преобразователей, блок A3 питания. Причем сетевое питающее напряжение подключено через вилку XI к блоку A3 питания, датчики положения 31 и нагрузки 32 через разъем Х2 соединены с микропроцессорным блоком А1. Выходы микропроцессорного блока А1 через разъем ХЗ, кабель и разъем Х4 соединены с блоком А2 выходных преобразователей, который, в свою очередь, через разъем Х5, кабель и разъем Х6 соединен с блоком 8, 10-А4 электропневмоклапанов.
10
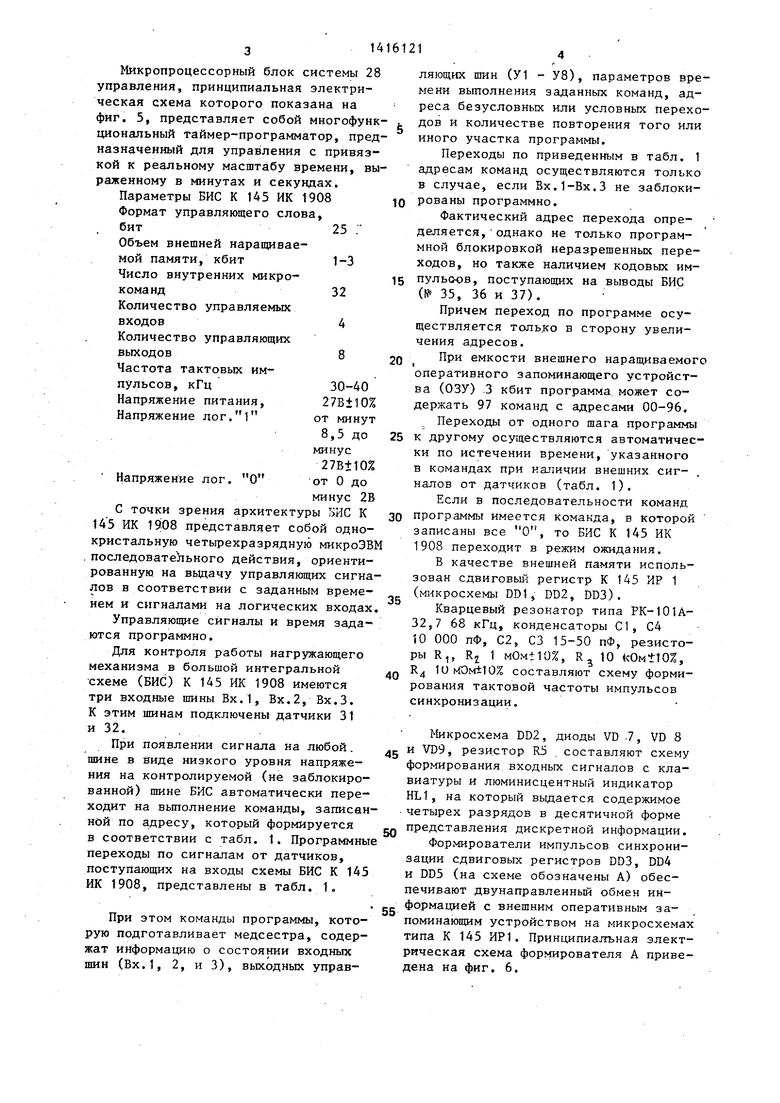
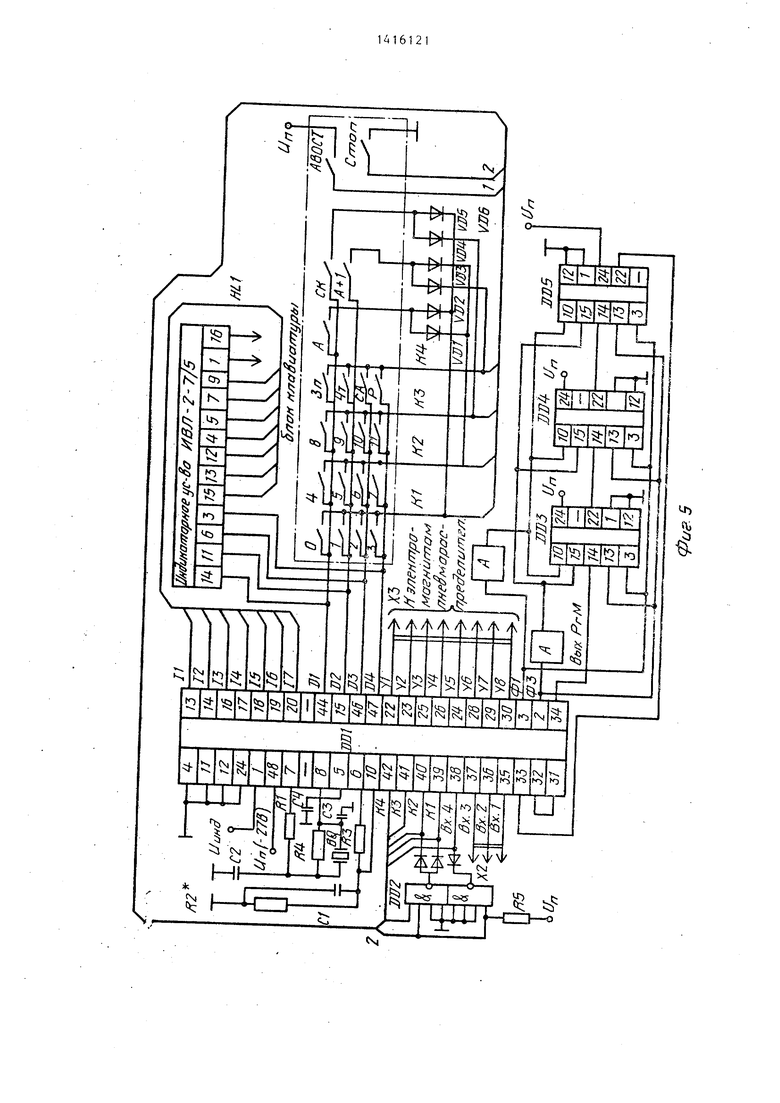
Микропроцессорный блок системы 28 управления, принципиальная электрическая схема которого показана на фиг, 5, представляет собой многофункциональный таймер-программатор, предназначенный для управления с привязкой к реальному масштабу времени, выраженному в минутах и секундах. Параметры БИС К 145 ИК 1908 Формат управляющего слова, бит25 .
Объем внешней наращиваемой памяти, кбит 1-3 Число внутренних микро-15
команд32
Количество управляемых входов4
Количество управляющих выходов8
Частота тактовых импульсов, кГц Напряжение питания. Напряжение лог,1
20
Напряжение лог. О
30-40 27Bt10% от минут
8,5 до минус
27В±10% от о до минус 2В
С точки зрения архитектуры БИС К 145 ИК 1908 представляет собой однокристальную четырехразрядную микроЭВМ последовательного действия, ориентированную, на выдачу управляющих сигнаов в соответствии с заданным временем и сигналами на логических входах. Управляющие сигналы и время задаются программно.
Для контроля работы нагружающего механизма в большой интегральной схеме (БИС) К 145 ИК 1908 имеются три входные шины Вх.1, Вх.2, Вх.З. К этим шинам подключены датчики 31 и 32,
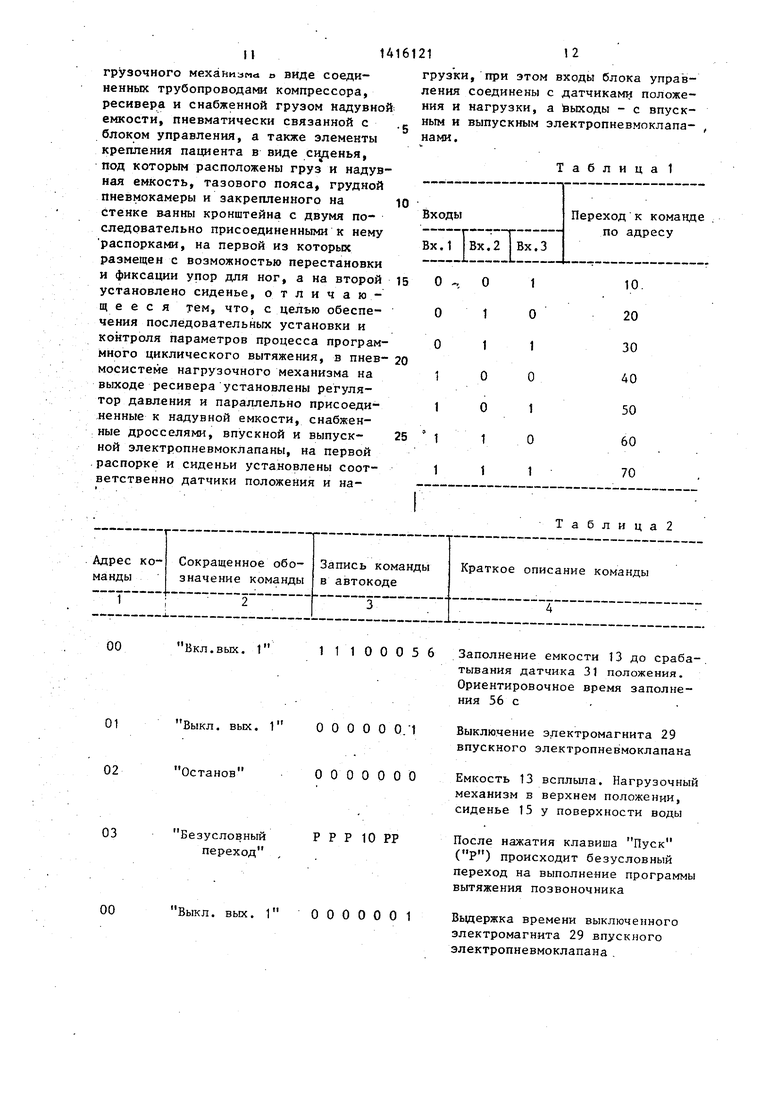
При появлении сигнала на любой. шине в виде низкого уровня напряжения на контролируемой (не заблокированной) шине БИС автоматически переходит на вьшолнение команды, записанной по адресу, который формируется в соответствии с табл. 1. Программные переходы по сигналам от датчиков, поступающих на входы схемы БИС К 145 ИК 1908, представлены в табл. 1.
При этом команды программы, которую подготавливает медсестра, содержат информацию о состоянии входньгх шин (Вх.1, 2, и 3), вькодных управ25
30
35
40
50
55
с
0
5
0
5
0
5
0
ляющих шин (У1 - У8), параметров времени выполнения заданных команд, адреса безусловных или условных переходов и количестве повторения того или иного участка программы.
Переходы по приведенным в табл. 1 адресам команд осуществляются только в случае, если Вх.1-Вх.З не заблокированы программно.
Фактический адрес перехода определяется, однако не только программной блокировкой неразрешенных переходов, но также наличием кодовых им- пульорв, поступающих на выводы БИС (№ 35, 36 и 37).
Причем переход по программе осуществляется только в сторону увеличения адресов.
При емкости внешнего наращиваемого I
оперативного запоминающего устройства (ОЗУ) 3 кбит программа может содержать 97 команд с адресами 00-96,
Переходы от одного шага программы к другому осуществляются автоматически по истечении времени, указанного в командах при наличии внешних сиг- . налов от датчиков (табл. 1).
Если в последовательности команд программы имеется команда, в которой записаны все О, то БИС К 145 ИК 1908 переходит в режим ожидания,
В качестве внешней памяти использован сдвиговый регистр К 145 ИР 1 (микросхемы DD1, DD2, DD3).
Кварцевый резонатор типа РК-101А- 32,7 68 кГц, конденсаторы С1, С4 10 000 пФ, С2, СЗ 15-50 пФ, резисторы R,, RJ 1 мОм110%, R, 10 (сОм±ТО%, Кд 1UNfOM±10% составляют схему формирования тактовой частоты импульсов синхронизации.
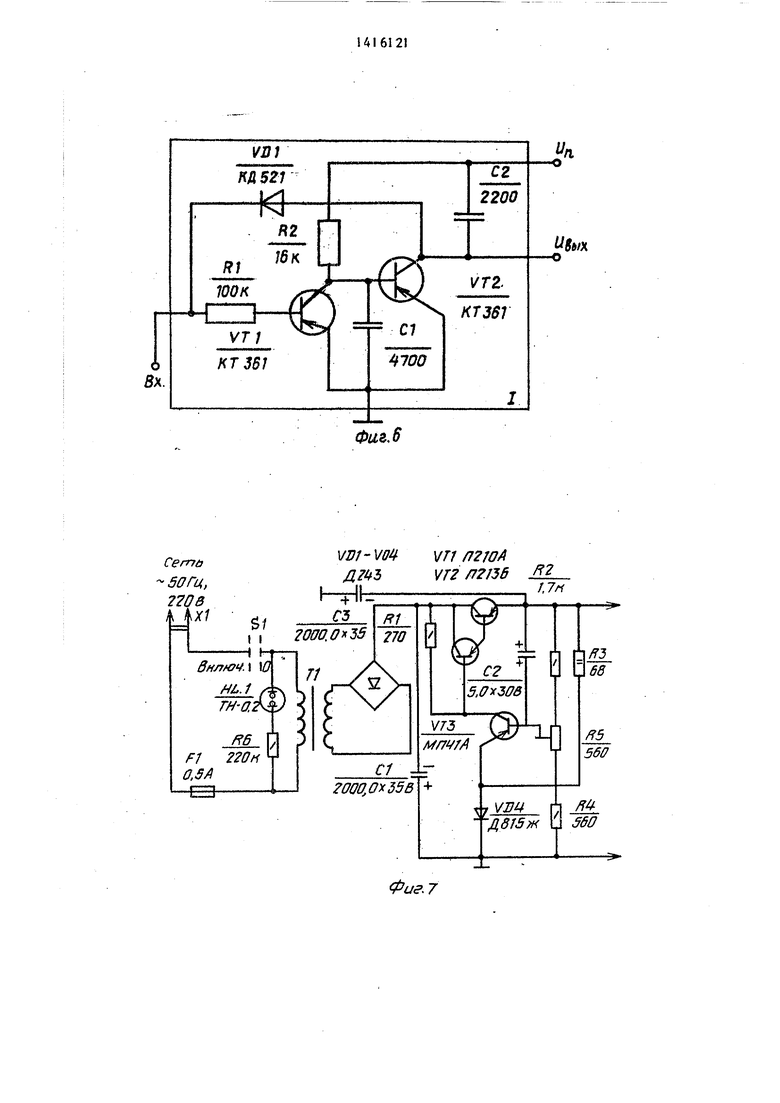
Микросхема DD2, диоды VD -7, VD 8 и VD9, резистор R5 составляют схему формирования входньгх сигналов с клавиатуры и люминисцентный индикатор HL1, на который выдается содержимое четырех разрядов в десятичной форме представления дискретной информации. Формирователи импульсов синхронизации сдвиговых регистров DD3, DD4 и DD5 (на схеме обозначены А) обеспечивают двунаправленный обмен информацией с внешним оперативным запоминающим устройством на микросхемах типа К 145 ИР1. Принципиальная электрическая схема формирователя А приведена на фиг. 6.
51
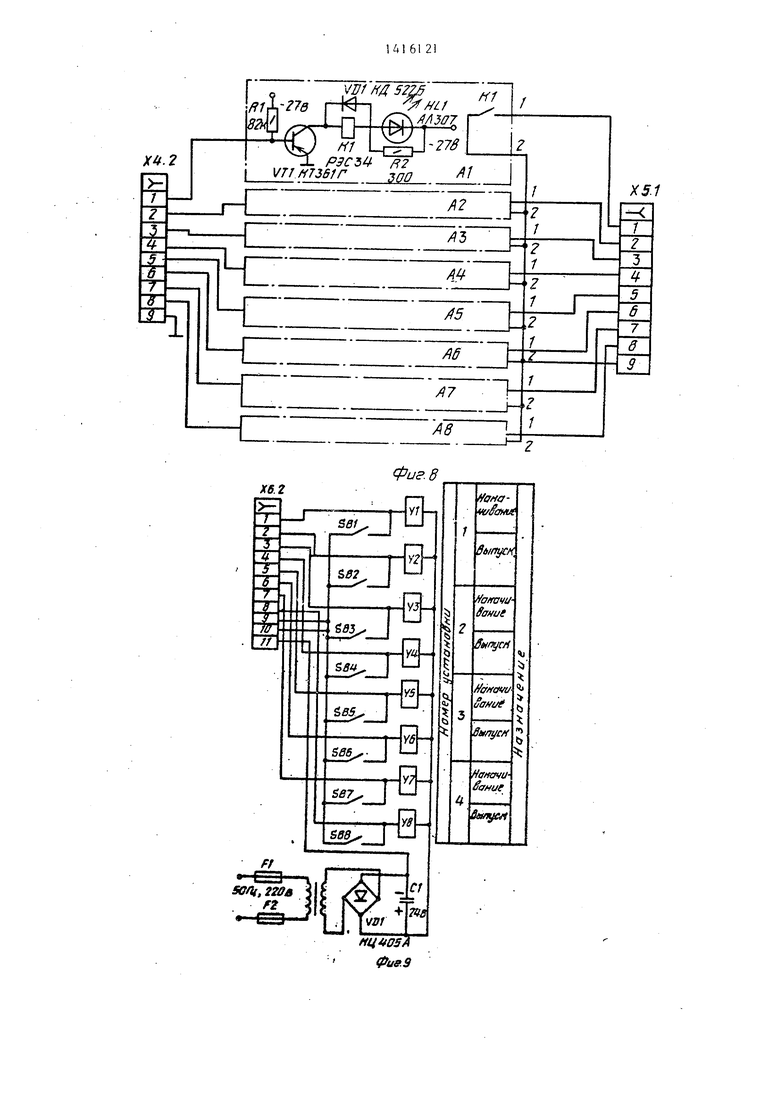
,Диоды обеспечивают формирование сигналов блока клавиатуры. ; Принципиальная электрическая схема (источника электропитания микропроцес- |горного блока показана на фиг. 7. рхема содержит выпрямительные диоды , соединенные по мостовой схе- Йе, трансформатор Т1, транзисторны jVT1-VT3j стабилитрон VD4 для создания |эпорного напряжения. I Стабилизатор напряжения обеспечи- ает постоянное плавное регулируемое Напряжение питания 26-30 В при силе froKa 4-5 А и коэффициенте стабилиза- дин около 5. Плавная регулировка вы- Ьсодного напряжения осуществляется fc помощью переменного резистора R2« i Блок выходных преобразователей Кфиг, 8) содержит восемь идентичных /сшштельных каналов А1-А8, входы рсоторых через разъем Х4 соединены . ic выходами БИС К 145 ИК 1908, У1-У8 Кфиг. 5),
i Выходы каждого преобразователя |через разъем Х5 соединены с блоком электропневмоклапанов 8 и 10.
I Блок 8 и 10 электропневмоклапанов {содержит восемь электропневмозолот- iHHKOBj соответственно числу каналов блока выходных преобразователей, показанных на фиг. 8.
Каждый выходной преобразователь содержит резисторы R, R, транзистор VT1, диод, VT2, развязывающее ре- ле К1, включенное последовательно ;со светодиодом HL1 и резистором Rj :в коллекторную цепь транзистора VT1. ; При поступлении сигнала на вход транзистора VT1 возрастает ток кол- лектора, реле К1 срабатьшает, контакты реле К1 замыкаются, подавая сигнал включения на электропневмозолот- ник.
Блок выходных преобразователей (фиг. 9) рассчитан на четыре установки для вытяжения позвоночника в соответствии с количеством выходов микропроцессорного блока, схема которого приведена на фиг. 5.
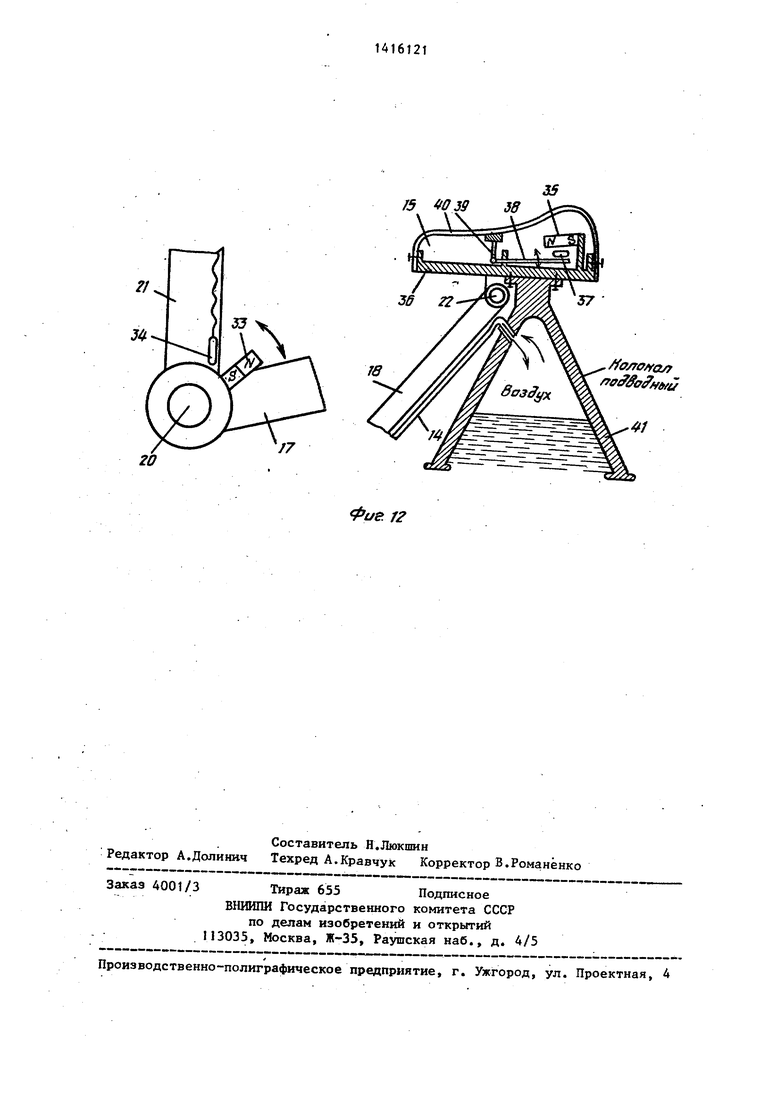
Блок 8 и 10 электропневмоклапанов включает восемь электропневмоклапанов типа П-ЭПК-12У4. Для управления в ручном режиме применяются кнопки SB1-SB8 Источник 24 В питания, включающий эле менты d. Т, VD1 типа Щ 405А, предохранители F1,F2, используется и для электропитания датчика 31 положения, состоящего из постоянного магнита 33,
216
закрепленного на шарнире 20 и герко- на 34, установленного на кронштейне 21, а также датчика нагрузки, выполненного в виде установленных внутри сиденья 15 постоянного магнита 35, закрепленного на основании 36 сиденья 15, и геркона 37, закрепленного на одном плече двуплечего рычага 38, при этом другое плечо соединено шарнирно через стойку 39 с опорной поверхность 40 сиденья 15.
Надувная емкость может иметь вид подводного колокола 41 и выполнять, кроме того, и функции груза 26.
Устройство для подводной вытяжки позвоночника работает следующим образом.
Перед началом процедуры медсестра набирает на клавиатуре микропроцессорного блока системы 28 управления управляющую программу, бло к-схема которой показана на фиг. 11.
По программе в соответствии с блок схемой алгоритма (фиг. 11) включается электромагнит 30 впускного электро- пневмоклапана 8, надувная емкость 13 надувается до всплывания сиденья 15. О всплывании сиденья 15 сигнализирует датчик 31 положения, который вьщает сигнал на отключение электромагнита 30 и впуск воздуха прекращается. Одновременно в программе задается приблизительное время заполнения надувной емкости 13.
После всплывания емкости 13 устройство готово для посадки пациента.
При этом- микропроцессорная система 28 управления находится в режиме ожидания, т.е. выполняется команда, в которой записаны все нули.
Для выхода из режима ожидания необходимо нажать кнопку Р блока клавиатуры, т.е. вновь перевести микропроцессорную систему управления из режима ожидания в режим интерпретации следующих команд программы.
После посадки пациента на сиденье 15 с одетой грудной пневмокамерой 25 и закрепления его тазовым поясом 16, медсестра нажимает кнопку Р блока клавиатуры, в результате чего продолжается выполнение программы, записанной в оперативное запоминающее устройство микропроцессорной системы 28 управления. По программе начинается выпуск воздуха из надувной емкости 13 Время выпуска t задается программно
и зависит от выбранной процедуры вытяжения позвоночника.
Реализуется два вида процедуры вытяжения позвоночника.
Первый вид - прямая процедура,
когда за весь период процедуры один раз повторяется цикл выпуска-накачивания воздуха из надувной емкости 13 При этом растягивающее усилие нарас- тает и спадает один раз в максимальном диапазоне.
Второй вид - циклическая процедура, когда цикл выпуска-накачивания воздуха повторяется заданное в про- грамме числопраз. Данный вид процедуры позволяет совмещать вытяжение со своеобразным массажем. Задавая время накачивания-выпуска, тем самым регулируют величину растягивающего усилия, а число периодов в процедуре второго вида определяется необходимым эффектом, который требуется достигнуть, учитывая состояние пациента.
Гибкость программного обеспечения позволяет пользоваться программой одной структуры: при обслуживании разньк пациентов изменяют только численные значения времени выпуска tg, времени выстоя С и числа п поьторе- ния циклов tj. , времени накачивания 1,
Система команд микропроцессорной системы управления на базе микропроцессора К 145 ИК 1908 состоит из операционных команд и команд управления программой.
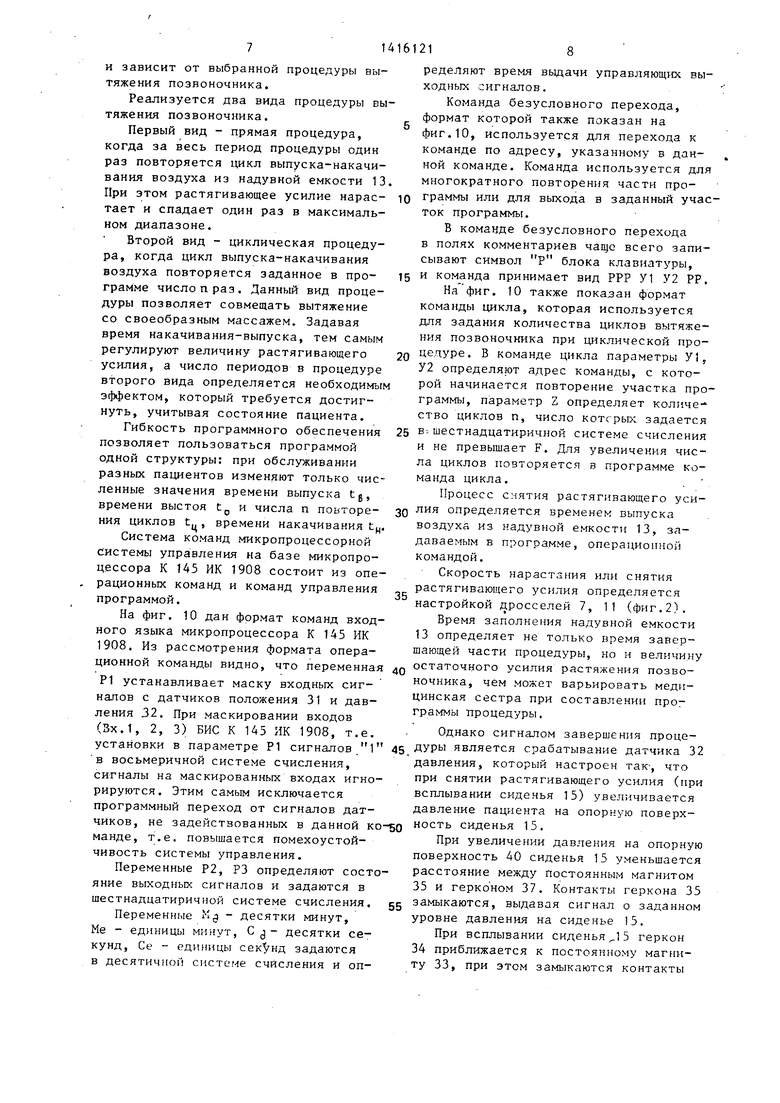
На фиг. 10 дан формат команд входного языка микропроцессора К 145 ИК 1908. Из рассмотрения формата операционной команды видно, что переменная Р1 устанавливает маску входных сигналов с датчиков положения 31 и давления 32. При маскировании входов (Sx.1, 2, 3) БИС К 145 ИК 1908, т.е. установки в параметре Р1 сигналов,1 в восьмеричной системе счисления, сигналы на маскированных входах игнорируются. Этим самым исключается программный переход от сигналов датчиков, не задействованных в данной ко манде, т.е. повышается помехоустойчивость системы управления.
Переменные Р2, РЗ определяют состояние выходных сигналов и задаются в шестнадцатиричной системе счисления.
Переменные
десятки минут.
Me - единицы минут, С j - десятки секунд. Се - единицы секунд задаются в десятичной системе счисления и оп
5 О
0 5 o
5
5
ределяют время выдачи управляющих выходных сигналов.
Команда безусловного перехода, формат которой также показан на фиг.10, используется для перехода к команде по адресу, указанному в данной команде. Команда используется для многократного повторения части программы или для выхода в заданный участок программы.
В команде безусловного перехода в полях комментариев чаще всего записывают символ Р блока клавиатуры, и команда принимает вид РРР У1 У2 PP.
На фиг. 10 также показан формат команды цикла, которая используется для задания количества циклов вытяжения позвоночника при ц 1к:лической процедуре. В команде цикла параметры У1, У2 определяют адрес команды, с которой начинается повторение участка программы, параметр Z определяет количество циклов п, число котгрых задается В:-шестнадцатиричной системе счисления и не превышает F. Для увеличения числа циклов повторяется в программе команда цикла..
Процесс снятия растягивающего усилия определяется временем выпуска воздуха из надувной емкости 13, задаваемым в программе, операционной командой.
Скорость нарастания или снятия растягивающего усилия определяется настройкой ;;росселей 7, 11 (фиг.2).
Время заполнения надувной емкости 13 определяет не только время завершающей части процедуры, но и величи.ну остаточного усилия растяжения позвоночника, чем может варьировать медицинская сестра при составлении программы процедуры.
Однако сигналом завершения процедуры является срабатывание датчика 32 давления, который настроен так-, что при снятии растягивающего усилия (при всплывании сиденья 15) увеличивается давление пациента на опорную поверхность сиденья 15.
При увеличении давления на опорную поверхность 40 сиденья 15 уменьшается расстояние между постоянным магнитом 35 и герконом 37. Контакты геркона 35 замыкаются, выдавая сигнал о заданном уровне давления на сиденье 15.
При всплывании сиденья 15 геркон 34 приближается к постоянному магниту 33, при этом замыкаются контакты
9
геркона 34, вьщавая сигнал на вход микропроцессорной системы 28 управления.
С целью достижения максимальной эффективности лечения в программе вытяжения позвоночника, блок-схема которой показана на фиг. 11, формир
ется время выстоя t с максимальным растягивающим усилием. При отсутствии необходимости выстоя tp его численное значение задается равным нулю.
Разработанная блок-схема гфограммы носит обобщенный характер, что придает ей универсальность для процедур вытяжения позвоночника первого и второго типа.
Количество команд, реализующих обобщенный алгоритм программы, стабильное и не меняется. Этот факт дает возможность медсестре приобрести навыки в наборе программы, изменяя лишь численные значения временных параметров процедуры вытяжения первого вида и меняя численные значения количества циклов повторения п при реализации процедуры второго вида - циклической.
При выполнении процедуры вытяже-- ния позвоночника пневмосистема нагрузочного механизма работает в автоматическом режиме поддержания постоянного давления в пневмосети. При этом компрессор 2 через пневмопроводы 14 нагнетает воздух и фильтр-влагоотдели- тель 3, в котором конденсируется влага, имеющаяся в сжатом воздухе. Сжатый воздух через фильтр-влагоотдели- тель 3 поступает в ресивер 4, к выходу которого подсоединен регулятор 6 давления, обеспечивающий ручную регулировку давления в пневмосистеме. Выход регулятора 6 соединен с дросселем 7, выход которого соединен со входом впускного электропневмоклапана 8 типа П-ЭПК-12 У4, Выход выпускного электропневмоклапана 8 соединен с пер- вььм входом тройника 9, ко второму входу которого подсоединен вход надувной
емкости 13, Выход тройника 9 соединен с входом выпускного электропневмоклапана 10, выход которого соединен через дроссель 11 с глушителем 12, Глушитель 12 предназначен для уменьшения шумовых эффектов при выпуске сжатого воздуха из надувной емкос-v. ти 13.
В табл, 2 приведена универсальная управляющая программа вытяжения позвоночника для микропроцессорной сис10
5
0
5
0
5
0
5
0
5
темы управления на базе большой интегральной схемы К 145 ИК 1908, Блок- схема алгоритма данной программы приведена на фиг, 11,
Особенностью программы, приведенной в табл, 2, является управление только одним механизмом нагружения, т,е, обслуживание одного пациента.
Микропроцессорная система управления, принципиальная электрическая схема которой показана на фиг, 5, позволяет управлять четьфьмя механизмами нагружения.
Управляющая программа для микропроцессорной dHCTeMbi управления йа базе схемы БИС К 145 ИК 1908 устройства для вытяжения позвоночника представлена в табл, 2,
Программа, приведенная в табл, 2 обеспечивает временное и. логическое (по сигналам датчиков 31 и 32) управление нагрузочным механизмом,
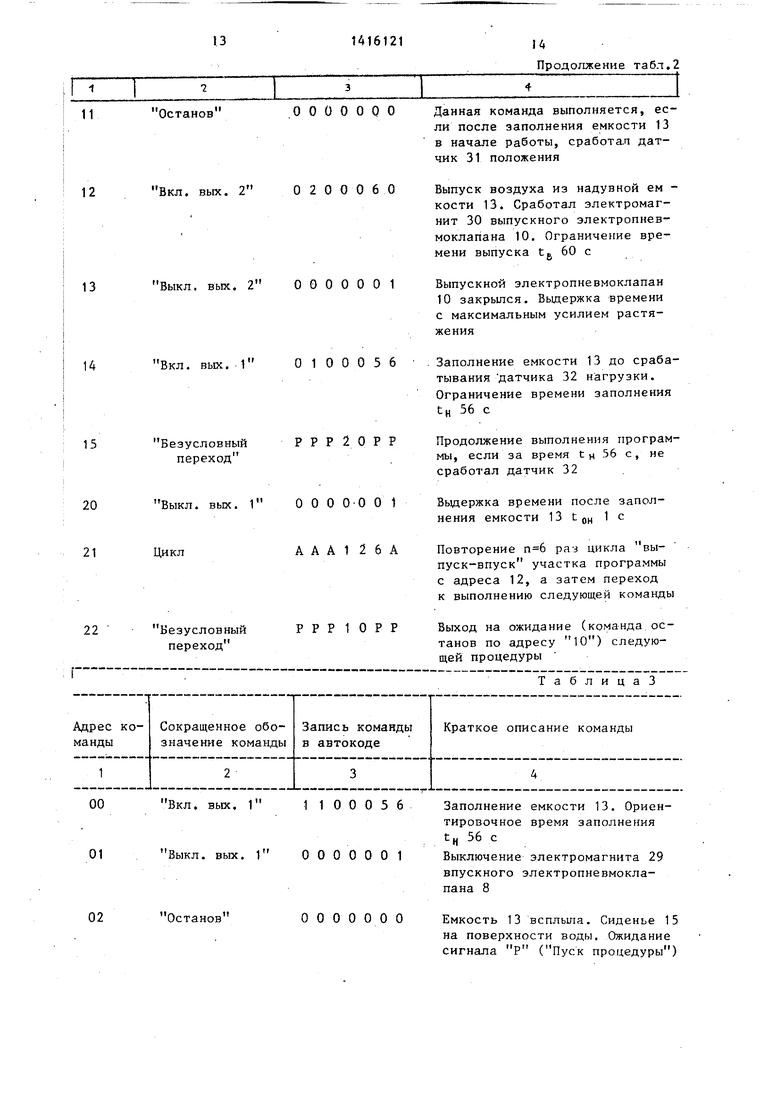
В случае, если датчики 31 и 32 не установлены, можно пользоваться только временной программой, которая приведена в табл, 3, Преимущество управляющей программы, приведенной в табл. 3, по сравнению с программой, приведенной в табл, 2, в случае временного управления заключается в лаконичности, она на четыре команды короче.
Управляющая программа для микропроцессорной системы управления на базе рхемы БИС К 145 ИК 1908 устройства для вытяжения позвоночника (временное управление) представлена в табл, 3,
Можно разработать и пользоваться множеством различных программ в зависимости от требуемой процедуры (прямой или циклической) и в зависимости от количества нагрузочных механизмов (количества пациентов),
Микропроцессорная система управления, которая составляет основу блока 27, позволяет без увеличения количества обслуживающего персонала обслуживать гораздо большее количество больных с точным выполнением проце- дурньк переходов.
Формула изобретения
Устройство для подводного вытяже-:-: ния позвоночника, содержащее ванну, блок управления с контрольно-измерительными приборами, пневмосистему нагрузочного механиамл о виде соединенных трубопроводами компрессора, ресивера и снабженной грузом надувной емкости, пневматически связанной с блоком управления, а также элементы крепления пациента в виде си ценья, под которым расположены груз и надувная емкость, тазового пояса, грудной пневмокамеры и закрепленного на стенке ванны кронштейна с двумя последовательно присоединенными к нему распорками, на первой из которых размещен с возможностью перестановки и фиксации упор для ног, а на второй установлено сиденье, отличающееся тем, что, с целью обеспечения последовательных установки и контроля параметров процесса программного циклического вытяжения, в пнев- мосистеме нагрузочного механизма на выходе ресивера установлены регулятор давления и параллельно присоединенные к надувной емкости, снабженные дросселями, впускной и выпуск- ной электропневмокЛапаны, на первой распорке и сиденьи установлены соответственно датчики положения и нагрузки, при этом входы блока управления соединены с датчиками положения и нагрузки, а йыходы - с впускным и выпускным электропневмоклапа- нами.
Таблица 1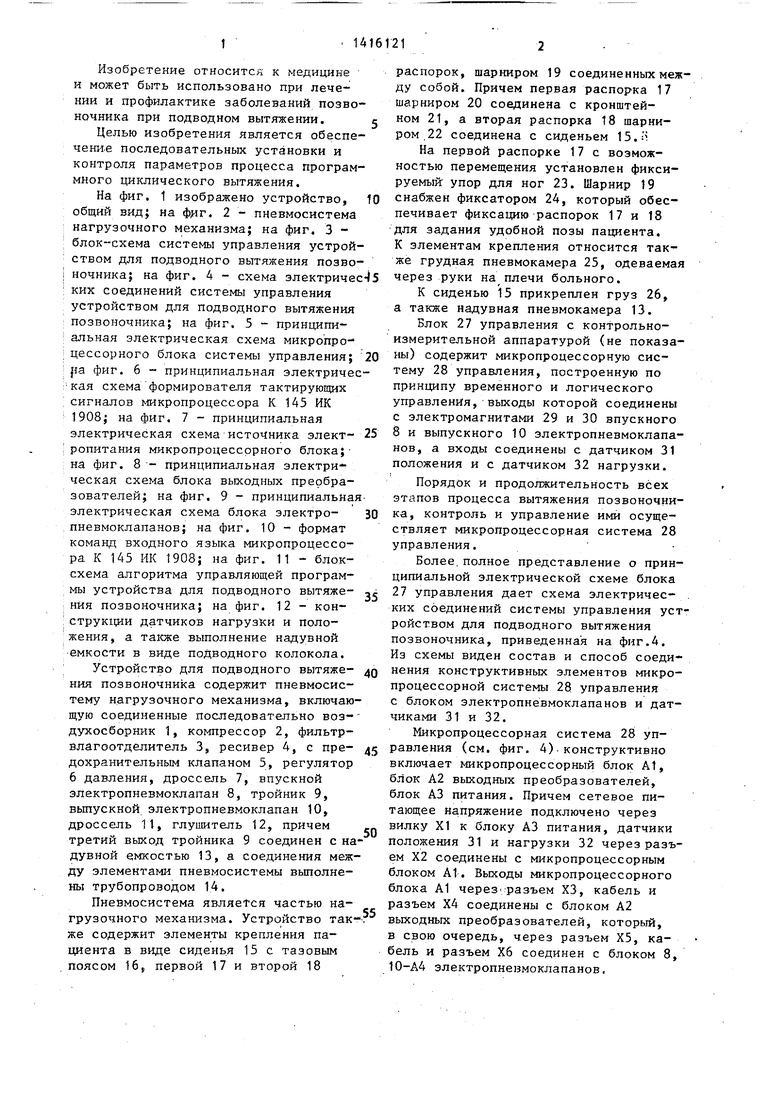
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подводного вытяжения позвоночника | 1990 |
|
SU1762919A1 |
| Привод муфты сцепления | 1989 |
|
SU1787818A1 |
| ВАННА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА В ПЛАВАТЕЛЬНЫХ БАССЕЙНАХ (ВАРИАНТЫ) | 2011 |
|
RU2457820C1 |
| ПРОТИВОПРОЛЕЖНЕВОЕ МАССАЖНОЕ УСТРОЙСТВО | 1998 |
|
RU2161471C2 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2011 |
|
RU2465882C2 |
| Устройство для подводного вытяже-Ния пОзВОНОчНиКА B бАССЕйНЕ | 1979 |
|
SU839526A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ВЕРТИКАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1991 |
|
RU2022546C1 |
| Устройство для подводного вертикального вытяжения позвоночника | 1978 |
|
SU741873A1 |
| Устройство для подводного горизонтального вытяжения позвоночника | 1984 |
|
SU1181659A1 |
| УСТРОЙСТВО ДЛЯ ПЛАВНОГО УПРАВЛЕНИЯ ВАГОНОЗАМЕДЛИТЕЛЕМ | 2006 |
|
RU2324615C2 |


Изобретение относится к медицинской техник е. Цель изобретения - обеспечение последовательных установки и контроля параметров процесса программного циклического вытяжения. Устройство содержит пневмосистему нагрузочного механизма, включающую в себя воздухосборник 1, компрессор 2, фильтр- влагоотделитель 3, ресивер 4 с предохранительным клапаном 5, регулятор давления 6, дроссель 7, впускной электропневмоклапан 8, тройник 9, выпускной электропневмоклапан 10, дроссель 11, глушитель 12. Третий выход тройника 9 соединен с надувной емкость.о 13, а соединения между элементами пневмосистемы выполнены трубопроводом .14. Блок управления с контрольно-измерительной аппаратурой со-, держит микропроцессорную систему управления, построенную по принципу временного и логического управления, выходы которой соединены с электромагнитами электропневмоклапанов 8,10, а входы соединены с датчиком положения и датчиком нагрузки. Порядок и продолжительность всех этапов процесса вытяжения позвоночника, контроль и управление ими осуществляет микропроцессорная система управления. 12 ил. 3 табл. ;О
Вкл.вых. 1
Выкл. вых. 1 Останов
1 1100056
О О О О О О 1
0000000
03
Безусловный переход ,
Р Р Р 10 РР
00
Выкл. вых. 1 0000001
Таблица2
Заполнение емкости 13 до срабатывания датчика 31 положения. Ориентировочное время заполнения 56 с
Выключение электромагнита 29 впускного электропневмоклапана
Емкость 13 всплыла. Нагрузочный механизм в верхнем положении, сиденье 15 у поверхности воды
После нажатия клавиша Пуск (Р) происходит безусловный переход на выполнение программы вытяжения позвоночника
Вьщержка времени выключенного электромагнита 29 впускного электропневмоклапана .
11
Останов
0000000
12
Вкл. Bbtx. 2
0200060
13
Выкл. вых. 2
0000001
14
Вкл. вых. 1
0100056
Безусловный переход
Выкл. вых. 1
Цикл
Р Р Р 2 О Р Р
0000-001 А А А 1 2 6 А
22
Безусловный переход
Р Р Р 1 О Р Р
01
Выкл. вых. 1 0000001
02
Останов
0000000
Продолжение табл.2
Данная команда выполняется, если после заполнения емкости 13 в начале работы, сработап датчик 31 положения
Выпуск воздуха из надувной ем - кости 13. Сработал электромагнит 30 выпускного электропнев- моклапана 10. Ограничение времени выпуска tg 60 с
Выпускной электропневмоклапан 10 закрылся. Выдержка времени с максимальным усилием растяжения
Заполнение емкости 13 до срабатывания датчика 32 нагрузки. Ограничение времени заполнения tH 56 с
Продолжение выполнения программы, если за время CH 56 с, не сработал датчик 32
Выдержка времени после заполнения емкости 13 tон 1 с
Повторение раз цикла выпуск-впуск участка программы с адреса 12, а затем переход к выполнению следующей команды
Выход на ожидание (команда останов по адресу 10) следующей процедуры
ТаблицаЗ
н 56 с
Выключение электромагнита 29 впускного электропневмокла- пана 8
Емкость 13 вспльша. Сиденье 15 на поверхности воды. Ожидание сигнала Р (Пуск процедуры)
03
Вкл. вых. 2 -0200060
04
Выкл. вых. 2 0000001
05
Вкл. вых. Г 01-00056
06
Выкл. вых. 1 0000001
07
Цикл
А А В О 3 9 А
08 Безусловный переход
Р Р Р О 2 Р Р
2S i
27
Продолжоипе табл. 3
Г
Выпуск воядуха из надувной емкости 13. Вк лючен электромагнит 30 выпускного электропнев- моклапана 10. Время выпуска tn 60 с
Выпу скной электропневмокла- пан 10 закрылся. Вьщержка максимального растягивающего уси- -лия t,p 1 с
Заполнение емкости 13. Ограничение времени заполнения t 56 с
Выключение электромагнита 29 впускного электропневмоклапа- на 8
Повторение раз цикла Впуск-выпуск воздуха из надувной емкости 13
Процедура завершена. Программный переход на выполнение команды Ожидание
0ue.i
28
Входы
Вы)оды
31
Сиденье
ЬСПЛЬ1ЛО
Есть даВление на, сиденье
Выпуск Воздуха из ёмкости
30
Накачидание Воздуха В ёмкость
Фи.З
фие.ЦN
tJ)
u
Vff/-Vff4
н-ИЬ
tt
n
Фие,6
Vn fr2WA
VrZ ff2l3B
},7H
Фиг. 7
Б1 НД 522.6
i
X
X62
fi1
фив.Э
формат операционной команды
Поле комен- тария
Формат цоминды по программе 65 Ч Jг 7
Поле комен- Адрес коман- Коли- Поле тарияды с которой честВо мменначинаетсй циклод тариев
повторение
Формат команды цикла
Адрес, перехода
Поле комен- /пария
Фиг.Ю
JTyfxtmir, ftMtffaujff v
gilffti
/7
/5 039
т
ff/Tffffa/9
41
Фие. Г2
| Устройство для вытяжения позвоночника | 1983 |
|
SU1091927A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
