Изобретение относится к железнодорожному транспорту, а именно к устройствам автоматики и телемеханики, осуществляющим управление вагонозамедлителями на сортировочных горках.
Известно устройство для управления вагонозамедлителем, содержащее тормозной и оттормаживающий электропневматические электропневмоклапаны, подключенные к выходу исполнительного блока, блоки гальванической развязки сигналов, блок формирования команд управления и подключенный к воздушной магистрали вагонозамедлителя контактный регулятор давления воздуха (Авторское свидетельство СССР №1041373, B61L 17/00).
Недостатком данного устройства является то, что для реализации промежуточных ступеней торможения в нем применен контактный регулятор давления, требующий ручной настройки зазоров между контактами и обладающий низкой надежностью.
Известно устройство для управления вагонозамедлителем, содержащее блок формирования команд управления, дешифратор, два блока коммутации, блок переключения, пневмоэлектрический преобразователь давления воздуха и четыре электропневматических электропневмоклапана. Оно принято в качестве прототипа (Патент Российской Федерации №2021935, B61L 17/00).
Недостатком этого устройства является то, что оно способно реализовать дискретное управление вагонозамедлителем, что не позволяет поддерживать уровень давления, находящийся между отдельными ступенями, а наращивание количества ступеней ведет к усложнению и громоздкости устройства.
Задачей предлагаемого устройства является плавное (недискретное) управление давлением воздуха в тормозной воздушной магистрали вагонозамедлителя, что позволяет повысить безопасность и эффективность управления скоростью отцепов на сортировочной горке за счет плавного регулирования усилия нажатия тормозных шин замедлителя на колесные пары отцепа. Предлагаемое устройство обеспечивает безопасность работы вагонозамедлителя за счет исключения случаев выдавливания колесных пар при резком возрастании усилия нажатия тормозных шин на колесные пары при переходе на более высокую ступень, повышает качество торможения вагонов и уменьшает трудоемкость обслуживания управляющей аппаратуры вагонозамедлителей.
Сущность изобретения заключается в том, что устройство управления вагонозамедлителем, содержащее подключенные к тормозной воздушной магистрали вагонозамедлителя тормозные и оттормаживающие электропневмоклапаны и пневмоэлектрический преобразователь давления воздуха, дополнительно снабжено микропроцессорным модулем плавного изменения давления, подключенным к информационному интерфейсу задания требуемого уровня давления и связанным через гальванически изолированный преобразователь сигнала обратной связи с пневмоэлектрическим преобразователем давления воздуха, а также связанным с силовыми ключами управления электропневмоклапанами через дискретные каналы вывода сигналов управления электропневмоклапанами.
Техническим результатом является плавное торможение вагонов с исключением резких воздействий на колесные пары подвижного состава, повышение качества управления вагонозамедлителями, сокращение расхода сжатого воздуха на торможение вагонов, увеличение срока службы вагонозамедлителей, а также возможность автоматизированного управления вагонозамедлителем через специализированные системы, унифицированные по интерфейсу.
Плавное управление достигается путем реализации заданного давления во всем диапазоне значений, ограниченных давлением в воздушной магистрали, с плавным изменением до требуемого уровня и реализацией обратной связи по уровню давления воздуха в тормозной магистрали замедлителя.
На чертеже представлена структурная схема предлагаемого изобретения.
Устройство плавного управления вагонозамедлителями содержит микропроцессорный модуль плавного изменения давления 1, связанный с информационным интерфейсом задания требуемого уровня давления 2 и дискретными каналами вывода сигналов управления электропневмоклапанами 3, связанными через силовые ключи управления электропневмоклапанами 4 с тормозными 5-6 и оттормаживающими 7-8 электропневмоклапанами, соединенными с тормозной воздушной магистралью вагонозамедлителя 9, к которой подключен пневмоэлектрический преобразователь давления воздуха 10, связанный через гальванически изолированный преобразователь сигнала обратной связи 11 с микропроцессорным модулем плавного изменения давления 1, тормозные электропневмоклапаны 5-6 подключены к питающей воздушной магистрали 12.
Конструктивно устройство представляет собой микропроцессорный модуль плавного изменения давления, дискретные каналы вывода сигналов управления электропневмоклапанами, силовые ключи управления электропневмоклапанами и гальванически изолированный преобразователь сигнала обратной связи, объединенные в едином типовом элементе замены, установленном в компоновочном каркасе, смонтированном на стативе поста электрической централизации сортировочной станции. Информационный интерфейс задания требуемого уровня давления представляет собой канал связи, например CAN-канал, с устройством или системой задания требуемого уровня давления, подключенный к микропроцессорному модулю. Тормозные и оттормаживающие электропневмоклапаны, пневмоэлектрический преобразователь давления воздуха, тормозная воздушная магистраль вагонозамедлителя, питающая воздушная магистраль пневмосети сортировочной станции размещены на поле сортировочной горки. Тормозные и оттормаживающие электропневмоклапаны, пневмоэлектрический преобразователь давления воздуха соединены кабельной линией с силовыми ключами управления электропневмоклапанами и гальванически изолированным преобразователем сигнала обратной связи.
Устройство работает следующим образом.
Устройство начинает работать сразу после включения питающего напряжения. Встроенное программное обеспечение микропроцессорного модуля плавного изменения давления осуществляет функционирование устройства следующим образом.
Микропроцессорный модуль 1 непрерывно сравнивает заданный уровень давления, получаемый из информационного интерфейса 2, с уровнем давления в тормозной воздушной магистрали вагонозамедлителя 9, получаемым через пневмоэлектрический преобразователь давления воздуха 10 и гальванически изолированный преобразователь сигнала обратной связи 11.
Если заданный уровень ниже полученного значения, то микропроцессорный модуль 1 через внутреннюю шину компьютера выдает в дискретные каналы вывода сигналов управления электропневмоклапанами 3 сигналы, которые через силовые ключи управления электропневмоклапанами 4 обеспечивают закрытие оттормаживающих электропневмоклапанов 7-8, открытие тормозных электропневмоклапанов 5-6 и поступление сжатого воздуха из питающей воздушной магистрали 12 в тормозную воздушную магистраль вагонозамедлителя 9.
Если заданный уровень выше полученного значения, то микропроцессорный модуль 1 через внутреннюю шину компьютера выдает в дискретные каналы вывода сигналов управления электропневмоклапанами 3 сигналы, которые через силовые ключи управления электропневмоклапанами 4 обеспечивают закрытие тормозных электропневмоклапанов 5-6, открытие оттормаживающих электропневмоклапанов 7-8 и выпуск сжатого воздуха из тормозной воздушной магистрали 9 в атмосферу.
При равенстве заданного уровня давления с полученным микропроцессорный модуль 1 через внутреннюю шину компьютера выдает в дискретные каналы вывода сигналов управления электропневмоклапанами 3 сигналы, которые через силовые ключи управления электропневмоклапанами 4 обеспечивают закрытие тормозных 5-6 и оттормаживающих 7-8 электропневмоклапанов.
При поддержании заданного уровня давления в случае утечек воздуха из тормозной воздушной магистрали вагонозамедлителя микропроцессорный модуль 1 сравнивает заданный уровень с уровнем давления в тормозной воздушной магистрали вагонозамедлителя 9, получаемым через пневмоэлектрический преобразователь давления воздуха 10 и гальванически изолированный преобразователь сигнала обратной связи 11, и через внутреннюю шину компьютера выдает в дискретные каналы вывода сигналов управления электропневмоклапанами 3 сигналы, которые через силовые ключи управления электропневмоклапанами 4 обеспечивают закрытие оттормаживающих электропневмоклапанов 7-8, открытие тормозных электропневмоклапанов 5-6 и поступление сжатого воздуха из питающей воздушной магистрали 12 в тормозную воздушную магистраль вагонозамедлителя 9.
При значительной разнице заданного и полученного уровней давления микропроцессорный модуль 1 через внутреннюю шину компьютера выдает в дискретные каналы вывода сигналов управления электропневмоклапанами 3 сигналы, которые через силовые ключи управления электропневмоклапанами 4 обеспечивают управление тормозными электропневмоклапанами 5-6 таким образом, что скорость нарастания давления ограничивается периодическим прекращением подачи воздуха для исключения случаев выдавливания колесных пар отцепа при резком возрастании усилия нажатия тормозных шин.
Таким образом, за счет возможности выбора усилия нажатия тормозных шин вагонозамедлителя в широком диапазоне значений обеспечивается плавность вытормаживания отцепа за минимальное количество циклов включения вагонозамедлителя, что ведет к сокращению расхода сжатого воздуха на торможение отцепов и увеличению срока службы вагонозамедлителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВАГОНОЗАМЕДЛИТЕЛЕМ | 1991 |
|
RU2021935C1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Автоматическая система регулирования давления | 2020 |
|
RU2744321C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРУЖИННО-ГИДРАВЛИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2013 |
|
RU2550005C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОДВИЖНОГО СОСТАВА | 2002 |
|
RU2240243C2 |
Устройство относится к железнодорожному транспорту, а именно к устройствам автоматики и телемеханики. Устройство содержит тормозные и оттормаживающие электропневмоклапаны, пневмоэлектрический преобразователь давления воздуха, микропроцессорный модуль плавного изменения давления, информационный интерфейс задания требуемого уровня давления, гальванически изолированный преобразователь сигнала обратной связи, пневмоэлектрический преобразователь давления воздуха, силовые ключи управления электропневмоклапанами, дискретные каналы вывода сигналов управления электропневмоклапанами. Микропроцессорный модуль плавного изменения давления подключен к информационному интерфейсу задания требуемого уровня давления и связан через гальванически изолированный преобразователь сигнала обратной связи с пневмоэлектрическим преобразователем давления воздуха, а также связан с силовыми ключами управления электропневмоклапанами через дискретные каналы вывода сигналов управления электропневмоклапанами. Технический результат заключается в повышении качества управления вагонозамедлителями. 1 ил.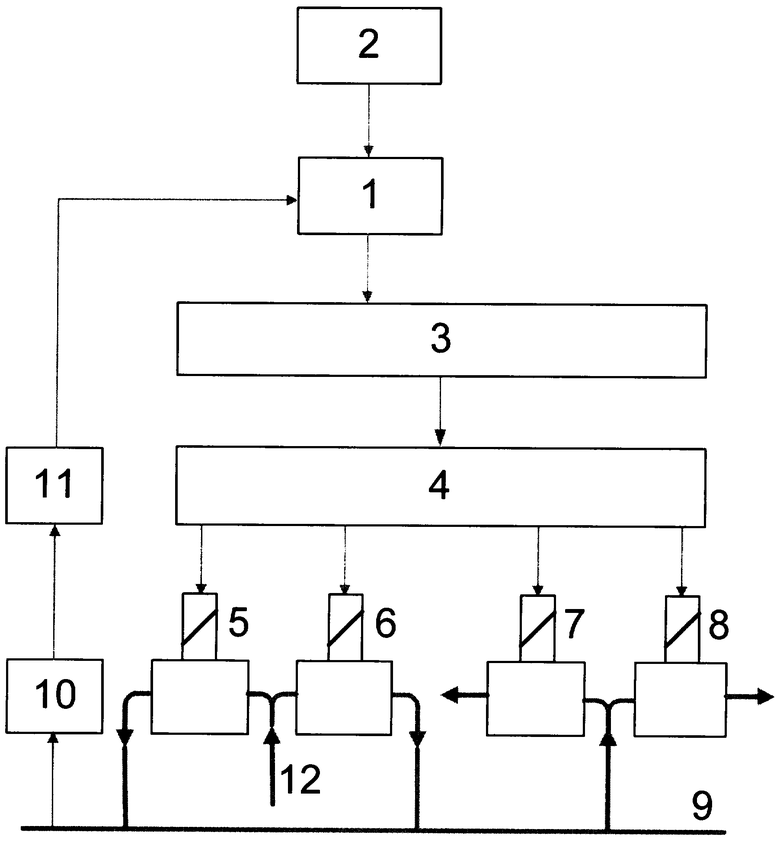
Устройство для плавного управления вагонозамедлителем, содержащее подключенные к тормозной воздушной магистрали вагонозамедлителя тормозные и оттормаживающие электропневмоклапаны и пневмоэлектрический преобразователь давления воздуха, подключенный к тормозной воздушной магистрали, отличающееся тем, что оно дополнительно снабжено микропроцессорным модулем плавного изменения давления, подключенным к информационному интерфейсу задания требуемого уровня давления и связанным через гальванически изолированный преобразователь сигнала обратной связи с пневмоэлектрическим преобразователем давления воздуха, а также связанным с силовыми ключами управления электропневмоклапанами через дискретные каналы вывода сигналов управления электропневмоклапанами.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВАГОНОЗАМЕДЛИТЕЛЕМ | 1991 |
|
RU2021935C1 |
| Устройство для управления вагонозамедлителем | 1982 |
|
SU1041373A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 0 |
|
SU261446A1 |
| US 3358139 A1, 12.12.1967. | |||

