Изобретение относится к автотракторостроению, дорожностроительной технике и может быть применено в системах, предназначенных для управления муфтами сцеплений.
Известно устройство для управления сцеплением транспортного средства, содержащее пневмоцилиндр усилителя, управляющий клапгн, исполнительный гидроцилиндр с головкой, цилиндр и педель. Наличие двух энергоносителей в виде пневматической и гидравлической части привода, а также устройства сопряжения между ними обусловливает конструктивную сложность указанного привода.
Более близкие по техническому исполнению является пневмопривод управления сцеплением автомобиля, содержащий педаль, тяги, рычаги вспомогательный цилиндр, рабочий исполнительный пневматический цилиндр, клапан пневмоусилителя, Недостатком данного привода является наличие значительной длины механического дистанционного управления, что снижает качество управления.
Целью изобретения является увеличение быстродействия срабатывания привода сцепления, облегчение управления сцеплением, обеспечение плавности трогания и плавности переключения передач.
Указанная цель достигается тем, что привод муфты сцепления снабжен датчиком положения педали, электрически соединенным с цифровым распределительным устройством, которое через два электрических канала и последовательно соединенный с ними двухканальный усилитель связано с электромагнитами электропневXI00 ч С
00
моклапанов впуска и выпуска модулятора, причем выходной пневматический канал электропневмоклапана впуска и входной пневматический канал электропневмокла- панэ выпуска соединены между собой и с исполнительным пневматическим цилиндром, редуктор давления связан с входным пневматическим каналом электропневмоклапана в пуска, а выходной пневматический канал электропневмоклапана выпуска сое- динен с атмосферой.
Исполнительная часть привода - модулятор - является компактным, что позволяет устанавливать его непосредственно с верхней крышки исполнительного цилиндра, что повышает быстродействие привода в целом. Отсутствие механических тяг и рычагов в приводе обеспечивает снижение усилия на педали управления сцеплением, что облегчает управление сцеплением, причем, реализуя оптимальный закон управления, можно значительно повысить плавность трогания с места и переключения передач.
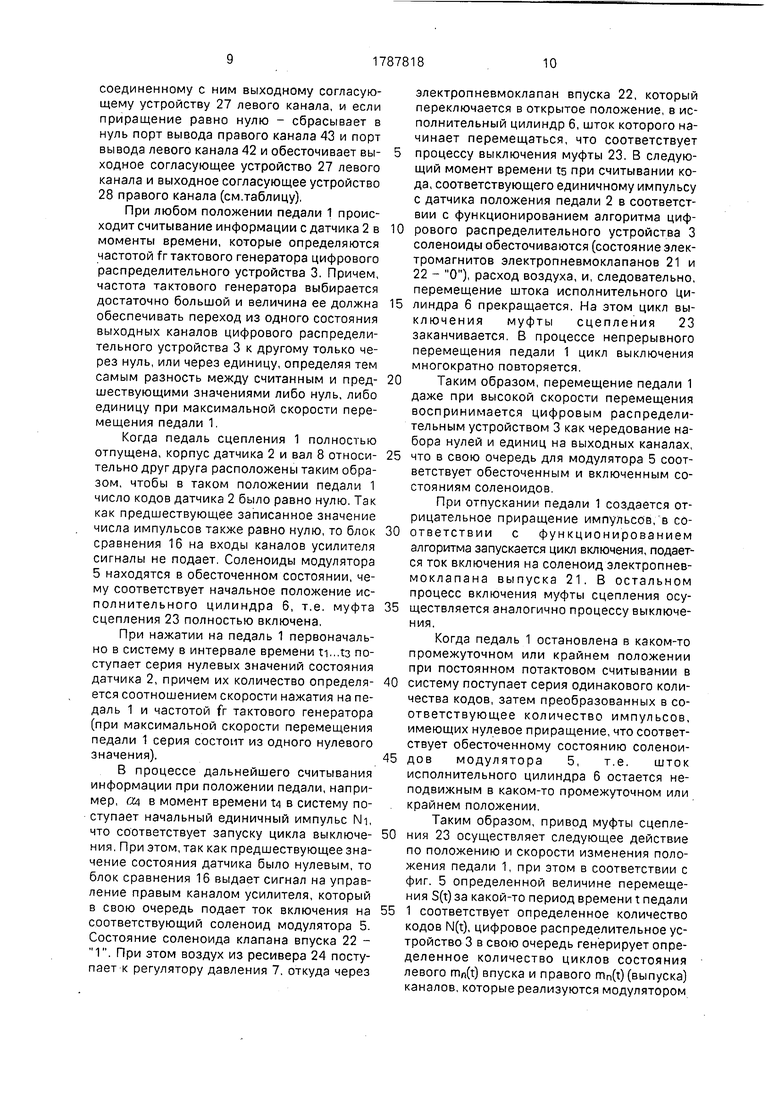
Работа цифрового распределительного устройства поясняется в таблице.
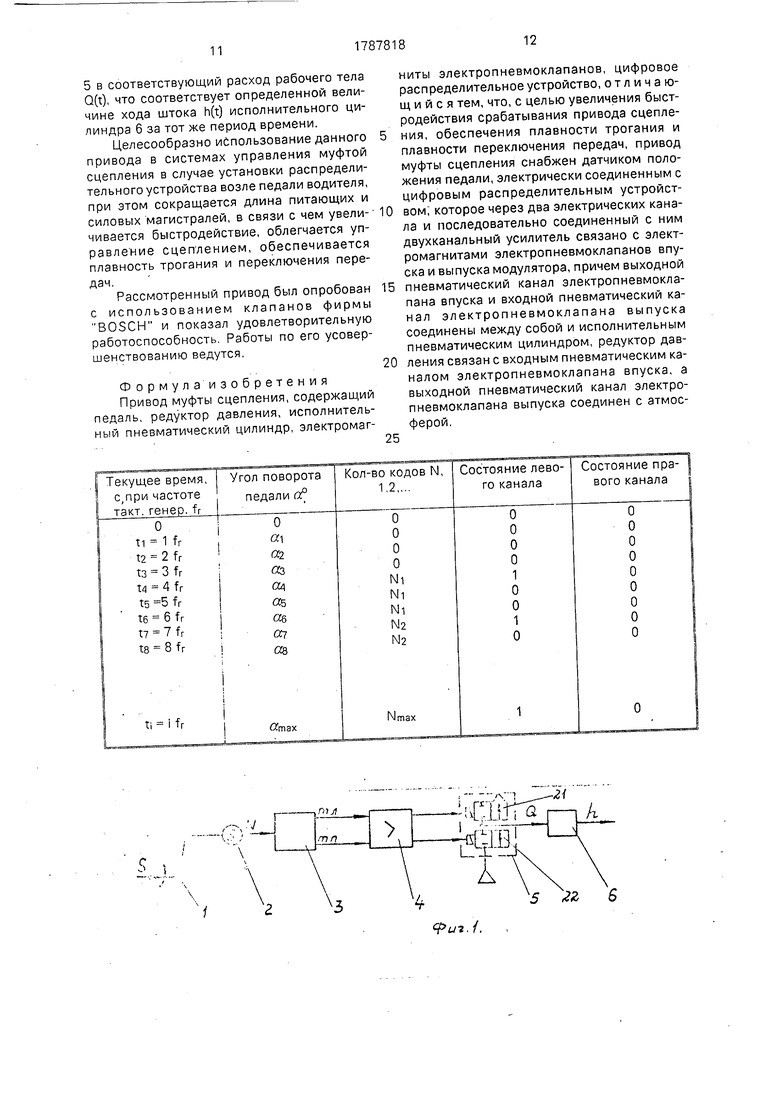
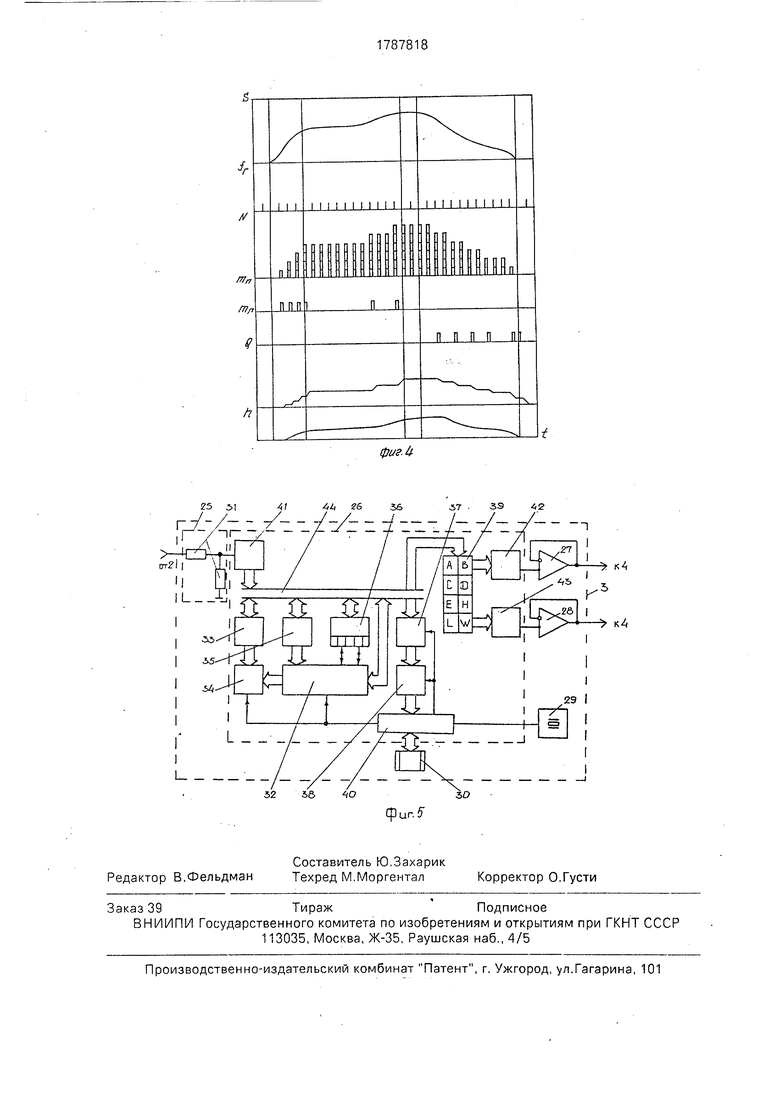
На фиг. 1 изображена схема привода муфты сцепления с модуляторам и цифровым распределительным устройством; на фиг. 2 - схема алгоритма функционирования цифрового распределительного устрой- ства; на фиг. 3 - привод управления муфты сцепления; на фиг, 4 - схема и характеристики сигналов на выходе отдельных боков системы; на фиг. 5 - структурно-функциональная схема цифрового распределитель- ного устройства.
Привод муфты сцепления состоит из педали 1, датчика положения педали2, цифрового распределительного устройства 3, двухканального усилителя 4, модулятора 5, исполнительного цилиндра 6 и редуктора давления 7,
Датчик положения педали 2 кодового типа предназначен для преобразования угла поворота педали 1 в дискретный кодиро- ванный сигнал. Возможно использование датчика положения педали 2 аналогового типа совместно с аналогоцифровым преобразователем, На валу 8, угловое перемещение которого преобразуется в цифровой код и на котором находится ось педали 1, жестко закреплен кодированный диск 9. Этот диск представляет собой стеклянное основание, на которое нанесена кодовая маска, образованная определенным числом кон- центричных кодовых дорожек с прозрачными и непрозрачными для светового потока сегментами. Осветитель, состоящий из лампы 10 и конденсатора 11, предназначен для формирования светового потока, проходящего через прозрачные сегменты кодовых дорожек диска и диафрагму 12. Кроме того, он предназначен для освещения фотоприемников 13. В результате каждому углу поворота педали 1 соответствует определенная комбинация единиц и нулей, являющаяся цифровым кодом данного угла, а угловая скорость привода педали 1 преобразуется соответственно в частоту следования кодированного сигнала.
Блок 14 предназначен для потактного считывания информации с датчика положения педали 2 и преобразования ее в соответствующее количество импульсов, а блок 15 предназначен для выборки из памяти входной преобразованной информации, записанной на предшествующем шаге работы цикла. Логический блок 16 является блоком сравнения текущего и предшествующего состояния блоков 14 и 15. Блоки управления
17 и 18 предназначены для подачи сигнала запуска усилителя, блок 19 - для отключения входных сигналов усилителя 4. Блоки управления 17, 18 и 19 связаны на входе с блоком сравнения 16. Блок20 предназначен для записи текущего состояния входного воздействия и связан с выходами блоков 17,
18 и 19.
Модулятор 5 состоит из двух двухпозици- онных, двухлинейных электромагнитных клапанов впуска и выпуска 21, 22, находящихся при обесточенных соленоидах в закрытом положении, а при подаче тока включения - в открытом, причем с целью снижения инерционности привода дросселирование клапанов 21 и 22 в открытом положении должно быть минимальным.
Привод установлен на муфте сцепления 23 фрикционного типа с исполнительным пневматическим1 цилиндром б, редуктором давления 7 и ресивером 24.
Блок 3 состоит из входного согласующего устройства 25, центрального процессора 26, выходного согласующего устройства 27 левого канала, выходного согласующего устройства 28 правого канала, генератора тактовой частоты 29, запоминающего устройства 30.
Входное согласующее устройство 26 выполнено в виде делителя напряжения с двумя сопротивлениями 31. Центральный процессор 26 представляет собой микропроцессорную однокристальную, восьмиразрядную БИС КР580ВМ80 (аналог Intel 8080А), выполненную по п-МОП-техноло- гии, входные и выходные сигналы соответствуют уровням работы ТТЛ-схем и состоит из арифметическо-логического устройства 32, аккумулятора 33, буфера аккумулятора 34, буферного регистра 35, регистра признаков 36, регистра команд 37, дешифратора команд 38, регистров общего назначения 39, устройства управления 40, порта ввода 41, порта вывода левого канала 42, порта вывода правого канала 43, шины данных 44. Тактовая частота работы цифрового распределительного устройства 3 составляет 1 МГц.
Функциональное назначение элементов центрального процессора следующее:
арифметическо-логическое устройство 32 используется для выполнения логических операций сравнения содержимого буфера аккумулятора 34 и буферного регистра 35 под воздействием устройства управле- ния 40;
буфер аккумулятора предназначен для хранения слова данных, посланного в него из выходного порта арифметическо-логиче- ского устройства 32. В буфере аккумулятора 34 хранится результат работы алфавитно- логического устройства 32 на текущем шаге или микроцикле. При этом, результат работы алфавитно-логического устройства 32 при предшествующем шаге или микроцикле стирается;
регистр признаков 36 имеет пять разрядов: бит переноса, дополнительный признак переноса, бит знака, бит нулевого признака, разряд признака четности. Бит нулевого признака сбрасывается если результат операций алфавитно-логического устройства 32, находящийся в буфере аккумулятора равен нулю. Если результат ненулевой, бит нулевого признака устанавливается единица. Остальные разряды используются в качестве индикатора проверок работы арифметическо-логиче- ского устройства 32;
порт ввода 41 постоянно содержит теку- щий код датчика 2 независимо от работы алфавитно-логического устройства 32;
устройство управления 40 предназначено для установки регистра команд 37, дешифратора команд 38 (команды которых предварительно считаны в запоминающее устройство 30) в режим реализации алгоритма;
шина данных 44 предназначена для обеспечения пересылки, сдвига содержимо- го регистров.
Выходное согласующее устройство 27 левого и правого 28 канала конструктивно выполнены в одном корпусе микросхемы серии ТТЛ К1501УД2А. Напряжение пита- ния данной микросхемы +15В и предназначено для согласования по нагрузке двухканального усилителя 4 и портов вывода левого канала 42, порта вывода правого канала 43.
Генератор тактовой частоты 29 содержит схему задающего генератора, частота вырабатываемых колебаний с амплитудой 12 В которого стабилизируется с помощью кварцевого резонатора. Возможно использование регулируемого кварца К531ГП. Периодследования выходных синхроимпульсов равен 1/9 периода следования импульсов задающего генератора и составляет 1 мкс. Генератор тактовой частоты выполнен на БИС КР580ГФ24.
Запоминающее устройство 30 может быть выполнено на микросхеме КР565РУ2, имеющую емкость 1024 бит. Для наращивания объема запоминающего устройства 30 возможно использование дополнительного адресного дешифратора. Предварительно, в запоминающее устройство 30 считывается программа, реализующая пошаговое выполнение алгоритма функционирования цифрового распределительного устройства 3.
Привод муфты сцепления работает следующим образом.
Редуктор давления 7 настраивается на величину давления полного выключения муфты сцепления. Цифровое распределительное устройство 3 (фиг. 1) подает сигнал запуска работы левого или правого канала усилителя 4 в зависимости от входного цифрового сигнала с датчика положения педали
2 и представляет собой процедурно-логическое запоминающее устройство, работу которого можно описать в виде алгоритма, приведенного на фиг. 2. Блок 14 осуществляет потактное считывание информации с датчика положения педали 2 и преобразовывает ее в соответствующее количество импульсов, а блок 15 - выборку из памяти входной преобразованной информации, записанной на предшествующем шаге работы цикла. После чего логический блок 16 сравнивает текущее и предшествующее состояние блоков 14 и 15 и в случае положительного приращения передает управление блоку 17, который подает сигнал запуска на правый канал усилителя 4, который известен, отрицательного - блоку 18, подается сигнал запуска на левый канал, и если приращение равно нулю, управление подается блоку 19, который отключает входные сигналы усилителя 4. Последним шагом работы цифрового распределительного устройства 3 является запись текущего состояния входного воздействия блоком 20.
Модулятор 5 - устройство сопряжения, которое преобразует электрический сигнал, подаваемый с двухканального усилителя 4 цифрового распределительного устройства
3 в расход рабочего тела, который в свою
очередь определяет перемещение штока исполнительного цилиндра 6 с заранее установленной дискретностью, определяемой выбором параметров и способом модулирования рабочего тела. Модулятор 5 реализует алгоритм управления цифрового распределительного устройства 3.
В данном изобретении рассматривается частотно-импульсное модулирование, а в качестве рабочего тела - сжатый воздух.
С датчика 2 поступает на входное согласующее устройство 25 соответствующий определенному положению педали 1 код. На выходе согласующего устройства 25 уровень выходного сигнала преобразуется до величины работы ТТЛ-схем. Далее цифровой код поступает в порт ввода 41. Таким образом, порт ввода 41 постоянно отражает информацию датчика 2.
Тактовой генератор 29 подает импульс на устройство управления 40, которое устанавливает регистр команд 37 и дешифратор команд 38 в режим программной реализации первого шага алгоритма, предварительно считанного В запоминающее устройство 30: считывание информации сдатчика положения педали 2, При этом происходит загрузка буферного регистра 35 с помощью шины данных 44 содержимого порта ввода 41,
Следующий импульс тактового генератора 29 поступает на устройство управления 40, которое устанавливает регистр команд 37 и дешифратор команд 38 в режим программной реализации второго шага алгоритма: выборка из памяти входной преобразованной информации,записанной на предшествующем шаге работы цикла. Здесь осуществляется сдвиг содержимого аккумулятора 33 в буфер аккумулятора 34.
Дальнейшая работа тактового генератора 29 приводит к вырабатыванию импульса, поступающего на устройство управления 40, которое устанавливает регистр команд 37 и дешифратор команд 38 в режим программной реализации третьего шага алгоритма: сравнение текущего и предшествующего шагов алгоритма. Здесь логически сравнивается содержимое буферного регистра 35 и буфера аккумулятора 34 алфавитно-цифровым устройством 32. При этом если содержимое буферного регистра 35 и буфера аккумулятора 34 является одинаковым (нулевое приращение), бит нулевого признака регистра признаков 36 сбрасывается в нуль, происходит с помощью шины данных 44 перемещение бита нулевого признака в регистры В и W общего назначения 39 с последующей передачей содержимого регистров В и W общего назначения 39 в порт вывода левого канала 42 и порт вывода правого канала 43. В том случае, если содержимое буферного регистра 35 больше буфера аккумулятора 34 (положительное приращение), бит нулевого признака регистра признаков 36 устанавливается в единицу, происходит с помощью шины данных 44 перемещения бита нулевого признака в регистр W общего назначения
0 39 с последующей передачей содержимого регистра общего назначения в порт вывода 43 правого канала. В том случае, если содержимое буферного регистра 35 меньше буфера аккумулятора 34 (отрицательное
5 приращение), бит нулевого признака регистра признаков 36 устанавливается в единицу, происходит с помощью шины данных 44 перемещение бита нулевого признака в регистр В общего назначения 39 с последую0 щей передачей содержимого регистра общего назначения в порт вывода 42 левого канала. Во всех случаях результата работы алфавитно-логического устройства на этом шаге помещается в буфер аккумулятора 34.
5 Последующий импульс тактового генератора 29 поступает на устройство управления 40, которое устанавливает регистр команд 37 и дешифратор команд 38 в режим программной реализации последнего шага
0 алгоритма: запись текущего состояния входного воздействия. Происходит сдвиг содержимого буферного регистра 35 в аккумулятор 33 с последующим сбросом регистра команд 37, дешифратора команд 38
5 в нуль. Это означает, что следующий импульс тактового генератора запустит первый шаг алгоритма. При этом содержимое аккумулятора 33 на предшествующем шаге стирается.
0 Таким образом, считывание информации с датчика положения педали 2 осущест- вляется за счет загрузки буферного регистра 35, выборка из памяти входной преобразованной информации,записанной
5 на предшествующем шаге работы цикла - за
счет сдвига содержимого аккумулятора 33 в
буфер аккумулятора 34, сравнение текущего
- и предшествующего шагов алгоритма - за
счет работы алфавитно-цифрового устрой0 ства 32, запись текущего состояния входного воздействия - за счет сдвига содержащего буферного регистра 35 в аккумулятор 33.
Цифровое распределительное устройст5 во 3 при положительном приращении входной информации передает управление порту вывода правого канала 43 и соединенному с ним выходному согласующему устройству 28 правого канала, при отрицательном приращении - порту вывода левого канала 42 и
соединенному с ним выходному согласующему устройству 27 левого канала, и если приращение равно нулю - сбрасывает в нуль порт вывода правого канала 43 и порт вывода левого канала 42 и обесточивает выходное согласующее устройство 27 левого канала и выходное согласующее устройство 28 правого канала (см.таблицу),
При любом положении педали 1 происходит считывание информации с датчика 2 в моменты времени, которые определяются частотой fг тактового генератора цифрового распределительного устройства 3. Причем, частота тактового генератора выбирается достаточно большой и величина ее должна обеспечивать переход из одного состояния выходных каналов цифрового распределительного устройства 3 к другому только через нуль, или через единицу, определяя тем самым разность между считанным и предшествующими значениями либо нуль, либо единицу при максимальной скорости перемещения педали 1.
Когда педаль сцепления 1 полностью отпущена, корпус датчика 2 и вал 8 относительно друг друга расположены таким образом, чтобы в таком положении педали 1 число кодов датчика 2 было равно нулю. Так как предшествующее записанное значение числа импульсов также равно нулю, то блок сравнения 16 на входы каналов усилителя сигналы не подает. Соленоиды модулятора 5 находятся в обесточенном состоянии, чему соответствует начальное положение исполнительного цилиндра 6, т.е. муфта сцепления 23 полностью включена.
При нажатии на педаль 1 первоначально в систему в интервале времени ti...t3 поступает серия нулевых значений состояния датчика 2, причем их количество определяется соотношением скорости нажатия на педаль 1 и частотой fr тактового генератора (при максимальной скорости перемещения педали 1 серия состоит из одного нулевого значения).
В процессе дальнейшего считывания информации при положении педали, например, ОА в момент времени т.4 в систему поступает начальный единичный импульс NI, что соответствует запуску цикла выключения. При этом, так как предшествующее значение состояния датчика было нулевым, то блок сравнения 16 выдает сигнал на управление правым каналом усилителя, который в свою очередь подает ток включения на соответствующий соленоид модулятора 5. Состояние соленоида клапана впуска 22 - 1. При этом воздух из ресивера 24 поступает к регулятору давления 7. откуда через
электропневмоклапан впуска 22, который переключается в открытое положение, в исполнительный цилиндр 6, шток которого начинает перемещаться, что соответствует
процессу выключения муфты 23. В следующий момент времени ts при считывании кода, соответствующего единичному импульсу с датчика положения педали 2 в соответствии с функционированием алгоритма циф0 рового распределительного устройства 3 соленоиды обесточиваются (состояние электромагнитов электропневмоклапанов 21 и 22 - О), расход воздуха, и, следовательно, перемещение штока исполнительного ци5 линдра 6 прекращается. На этом цикл выключения муфты сцепления 23 заканчивается. В процессе непрерывного перемещения педали 1 цикл выключения многократно повторяется.
0 Таким образом, перемещение педали 1 даже при высокой скорости перемещения воспринимается цифровым распределительным устройством 3 как чередование набора нулей и единиц на выходных каналах,
5 что в свою очередь для модулятора 5 соответствует обесточенным и включенным состояниям соленоидов.
При отпускании педали 1 создается отрицательное приращение импульсов,гв со0 ответствии с функционированием алгоритма запускается цикл включения, подается ток включения на соленоид электропнев- моклапана выпуска 21. В остальном процесс включения муфты сцепления осу5 ществляется аналогично процессу выключения.
Когда педаль 1 остановлена в каком-то промежуточном или крайнем положении при постоянном потактовом считывании в
0 систему поступает серия одинакового количества кодов, затем преобразованных в соответствующее количество импульсов, имеющих нулевое приращение, что соответствует обесточенному состоянию соленои5 дов модулятора 5, т.е. шток исполнительного цилиндра 6 остается неподвижным в каком-то промежуточном или . крайнем положении.
Таким образом, привод муфты сцепле0 ния 23 осуществляет следующее действие по положению и скорости изменения положения педали 1, при этом в соответствии с фиг. 5 определенной величине перемещения S(t) за какой-то период времени t педали
5 1 соответствует определенное количество кодов N(t), цифровое распределительное устройство 3 в свою очередь генерирует определенное количество циклов состояния левого гпл(т) впуска и правого mn(t) (выпуска) каналов, которые реализуются модулятором
5 в соответствующий расход рабочего тела Q(t), что соответствует определенной величине хода штока h(t) исполнительного цилиндра 6 за тот же период времени.
Целесообразно использование данного привода в системах управления муфтой сцепления в случае установки распределительного устройства возле педали водителя, при этом сокращается длина питающих и силовых магистралей, в связи с чем увели- чивается быстродействие, облегчается управление сцеп лением, обеспечивается плавность трогания и переключения передач.
Рассмотренный привод был опробован с использованием клапанов фирмы BOSCH и показал удовлетворительную работоспособность. Работы по его усовершенствованию ведутся.
Формулаизобретения Привод муфты сцепления, содержащий педаль, редуктор давления, исполнительный пневматический цилиндр, электромаг0
5
0
ниты электропневмоклапанов, цифровое распределительное устройство, отличающийся тем, что, с целью увеличения быстродействия срабатывания привода сцепления, обеспечения плавности трогания и плавности переключения передач, привод муфты сцепления снабжен датчиком положения педали, электрически соединенным с цифровым распределительным устройством; которое через два электрических канала и последовательно соединенный с ним двухканальный усилитель связано с электромагнитами электропневмоклапанов впуска и выпуска модулятора, причем выходной пневматический канал электропневмокла- пана впуска и входной пневматический канал электропневмоклапана выпуска соединены между собой и исполнительным пневматическим цилиндром, редуктор давления связан с входным пневматическим каналом электропневмоклапана впуска, а выходной пневматический канал электропневмоклапана выпуска соединен с атмосферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ТОРМОЗНОМ ПРИВОДЕ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2095263C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| Система управления работой автомобильного дизеля в динамическом режиме самостоятельного холостого хода | 2019 |
|
RU2702445C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ЛИНИЯМ РАСПРЕДЕЛИТЕЛЬНЫХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2338317C2 |
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |
| МНОГОРЕЖИМНОЕ УСТРОЙСТВО РАДИОСВЯЗИ И МНОГОРЕЖИМНЫЙ СОТОВЫЙ РАДИОТЕЛЕФОН | 1993 |
|
RU2128886C1 |

Использование: относится к автотракторостроению и может быть применено в системах, предназначенных для управления муфтами сцеплений. Сущность изобретения: при выключении муфты сцепления первоначально в систему поступает серия нулевых значений состояния датчика, в процессе дальнейшего считывания информации в систему поступает начальный единичный импульс, что соответствует запуску цикла включения. При этом блок сравнения выдает сигнал на управление правым каналом усилителя, который подает ток включения на соответствующий соленоид модулятора, и впускной электропневмоклапан переключается в открытое состояние, воздух из ресивера поступает к регулятору давления, откуда через впускной электропневмоклапан поступает в исполнительный цилиндр, что соответствует процессу включения муфты. В следующий момент времени при считывании кода, соответствующего единичному импульсу с датчика, соленоиды обесточиваются, расход воздуха и цикл включения муфты сцепления заканчиваются. В процессе включения муфты сцепления цикл включения многократно повторяется. 5 ил.
«./.
Ж
fffrr
тл 9
h
| Сига X., Мидзутани С | |||
| Введение в автомобильную электрошину, 1986, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
