Изобретение относится к устройствам для двустороннего сталкивания бревен с продольного конвейера и может быть использовано в линиях сор- тировки бревен на участках подготовки сырья на предприятиях лесной и деревообрабатывающей промышленности.
Целью изобретения является снижение энергоемкости и повышение надеж- ности работы устройства.
На фиг. 1 изображено предлагаемое устройство, вид; на фиг. 2 15
В исходном положении сталкивающие рычаги 4 и 5 расположены ниже упоров 3 Исходное положение рычагов 4 и 5, порядок и направление их рабочих и хо- лостьк ходов может задаваться известным способом посредством известных средств или, например, оператором дистанционно с пульта управления или ав томатически посредством программного устройства в виде датчиков измерения параметров (сечения, качества) бревен и датчиков контроля положений рычагов и наличия бревен в зоне сброса. Независимо от управления при заходе транс портируемого конвейером бревна 1 в зо ну сброса (в зону соответствующего подсортного места) включается электродвигатель 23 и привод 6 на рабочий ход левых и правых сталкивающих рычагов 4, 5. Например, после включения электродвигателя 23 привода 6 на прямой ход (по часовой стрелке на фиг.1) выходной вал 7 последнего приводит во вращение связанные с ним храповые колеса 19 и 20, одно из которых 19,
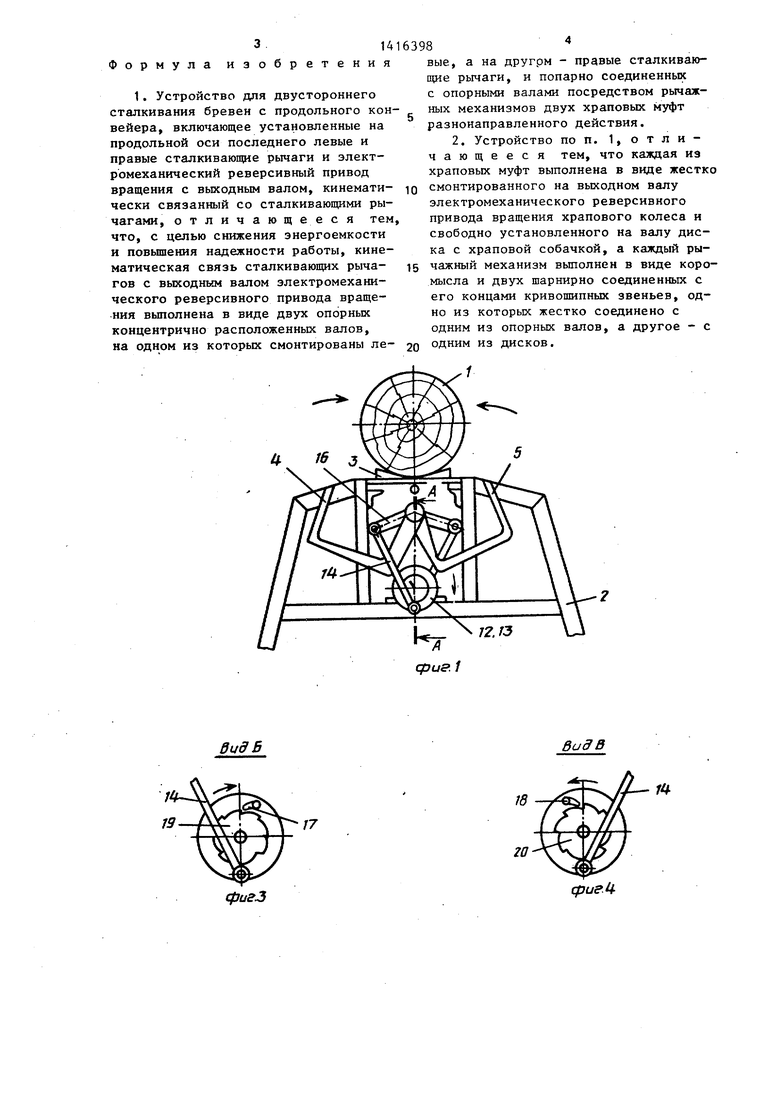
с ечение А-А на фиг. 1; на фиг. 3 - вид В на фиг. 2; на фиг. 4 - вид В на фиг. 2.
Устройство для двустороннего сталкивания бревен 1 с установленного на раме 2 продольного конвейера с 20 упорами 3 на его цепных контурах включает левые и правые сталкивающие рычаги 4, 5, электромеханический ревер- сивньга привод 6 вращения с выходным валом 7. Сталкивающие рычаги 4 и 5 25 жестко установлены соответственно на концентрично расположенных один в другом наружном и внутреннем опорных валах 8 и 9, установленных в шарнирных опорах 10 и .11. Выходной и опор- 30 через его зубья и упорные элементы ные валы 7, 8 и 9 установлены по про- храповой собачки 17. синхронный, со- дольной оси конвейера ниже упоров 3. Опорные валы 8 и 9 кинематически связаны с выходным валом 7 посредством двух храповых муфт 12 и 13 разно-35 Д неподвижным, ибо собачка 18 направленного действия и двух рычаж- свободно перемещается по зубьям ко- ных механизмов, например в виде коромысел 14 и щарнирно связанных с ними кривошипных звеньев 15 и 16, причем храповые муфты 12 и 13 выполнены, например, в виде свя занных, по меньшей мере, через две храповые собачки 17 и 18 двух храповых колес 19 и 20 и .двух дисков 21 и 22. Кривошипные звенья 15 соединены с соответствующи-45 ° конвейера. При дальнейшем пово- ми дисками 21 и 22, а кривошипные Роте вала 7 и колеса 19 (с 180 до звенья 16 - с соответствующими опор- 360°) происходит возврат коромысла 14 ными валами 8 и 9. Привод 6 вьшолнен в виде, например, червячного редуктора, приводимого в действие от элект- ,Q родвигателя 23.
Устройство, кроме того, имеет датчики контроля положения рычагов 4, 5, электрически связанные с электродвигателем 23 для его отключения, при этом датчики могут быть выполнены в виде известных путевых контактных или бесконтактных выключателей (не показаны) .:
40
55
поворачиваясь на 180 , обеспечивает
гласованный с валом 7, поворот диска 21 на тот же угол, а другое колесо 20, поворачиваясь, оставляет
леса 20, не зацепляясь с ними. При повороте диска 21 на 180 последние через коромысло 14 и кривошипные элементы 15 и 16 поворачивают опорный вал 8 и сталкивающие рычаги 5, при этом рычаги 5, проходя над упорами 3i поперек конвейера, вступают во взаимодействие с бревном 1 и сталкивают
и рычагов 5 в исходное положение. Электродвигатель 23 привода 6 отключается . Далее цикл при подходе следующего бревна повторяется аналогичным образом, при этом сброс бревна в другую сторону происходит аналогичным образом (за счет реверсирования привода), с той лишь разницей, что приводятся в движение через диск 22 и вал 9 сталкивающие рычаги 4, а рычаги 5 и связанные с ним вал 8 и диск 21 остаются неподвижными.
Устройство работает следующим образом.
В исходном положении сталкивающие рычаги 4 и 5 расположены ниже упоров 3. Исходное положение рычагов 4 и 5, порядок и направление их рабочих и хо- лостьк ходов может задаваться известным способом посредством известных средств или, например, оператором дистанционно с пульта управления или ав- томатически посредством программного устройства в виде датчиков измерения параметров (сечения, качества) бревен и датчиков контроля положений рычагов и наличия бревен в зоне сброса. Независимо от управления при заходе транспортируемого конвейером бревна 1 в зону сброса (в зону соответствующего подсортного места) включается электродвигатель 23 и привод 6 на рабочий ход левых и правых сталкивающих рычагов 4, 5. Например, после включения электродвигателя 23 привода 6 на прямой ход (по часовой стрелке на фиг.1) выходной вал 7 последнего приводит во вращение связанные с ним храповые колеса 19 и 20, одно из которых 19,
через его зубья и упорные элементы храповой собачки 17. синхронный, со- Д неподвижным, ибо собачка 18 свободно перемещается по зубьям ко- ° конвейера. При дальнейшем пово- Роте вала 7 и колеса 19 (с 180 до 360°) происходит возврат коромысла 14
через его зубья и упорные элементы храповой собачки 17. синхронный, со- Д неподвижным, ибо собачка 18 свободно перемещается по зубьям ко- ° конвейера. При дальнейшем пово Роте вала 7 и колеса 19 (с 180 до 360°) происходит возврат коромысла 14
поворачиваясь на 180 , обеспечивает
через его зубья и упорные элементы храповой собачки 17. синхронный, со- Д неподвижным, ибо собачка 18 свободно перемещается по зубьям ко- ° конвейера. При дальнейшем пово- Роте вала 7 и колеса 19 (с 180 до 360°) происходит возврат коромысла 14
гласованный с валом 7, поворот диска 21 на тот же угол, а другое колесо 20, поворачиваясь, оставляет
через его зубья и упорные элементы храповой собачки 17. синхронный, со- Д неподвижным, ибо собачка 18 свободно перемещается по зубьям ко- ° конвейера. При дальнейшем пово- Роте вала 7 и колеса 19 (с 180 до 360°) происходит возврат коромысла 14
леса 20, не зацепляясь с ними. При повороте диска 21 на 180 последние через коромысло 14 и кривошипные элементы 15 и 16 поворачивают опорный вал 8 и сталкивающие рычаги 5, при этом рычаги 5, проходя над упорами 3i поперек конвейера, вступают во взаимодействие с бревном 1 и сталкивают
через его зубья и упорные элементы храповой собачки 17. синхронный, со- Д неподвижным, ибо собачка 18 свободно перемещается по зубьям ко- ° конвейера. При дальнейшем пово- Роте вала 7 и колеса 19 (с 180 до 360°) происходит возврат коромысла 14
и рычагов 5 в исходное положение. Электродвигатель 23 привода 6 отключается . Далее цикл при подходе следующего бревна повторяется аналогичным образом, при этом сброс бревна в другую сторону происходит аналогичным образом (за счет реверсирования привода), с той лишь разницей, что приводятся в движение через диск 22 и вал 9 сталкивающие рычаги 4, а рычаги 5 и связанные с ним вал 8 и диск 21 остаются неподвижными.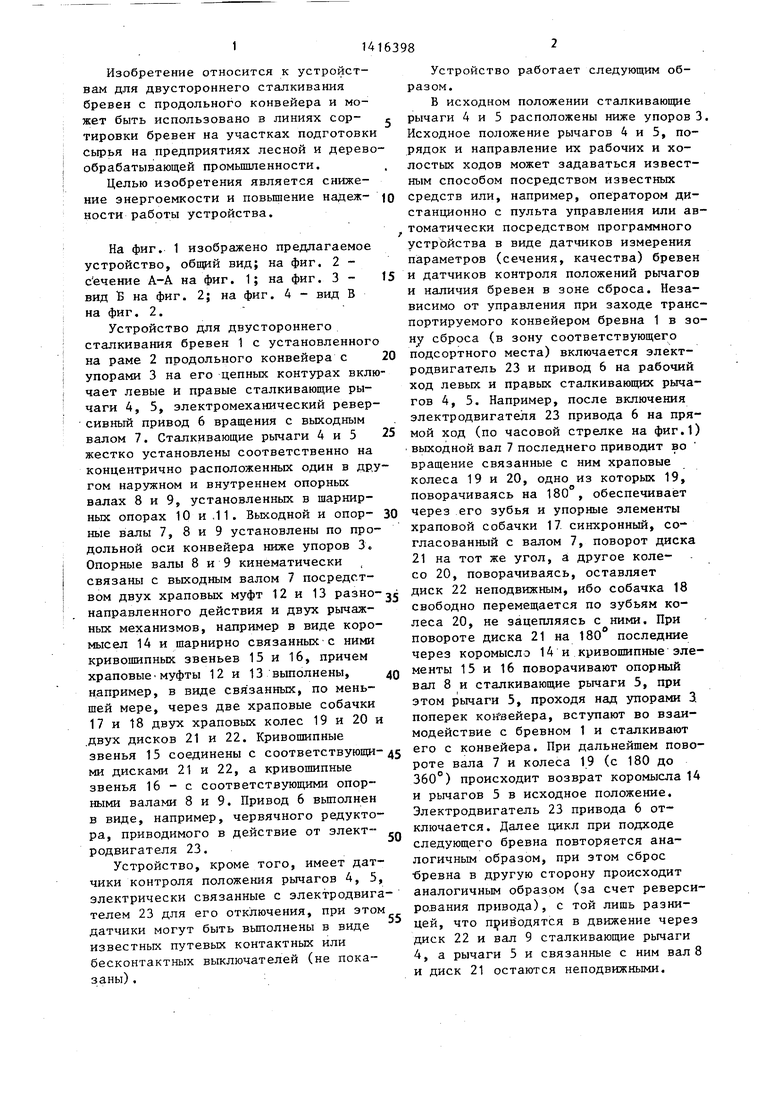
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки бревен по диаметру | 1960 |
|
SU133808A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2010 |
|
RU2454317C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК ДЛЯ ПРОДОЛЬНОГО РАСПИЛА "ГАТЕР 2000" | 2000 |
|
RU2181079C1 |
| УСТРОЙСТВО для СБРАСЫВАНИЯ БРЕВЕН С ПРОДОЛЬНОГО | 1966 |
|
SU187626A1 |
| Устройство для управления исполнительным механизмом | 1977 |
|
SU734641A1 |
| Устройство для погрузки бревен на железнодорожные платформы | 1935 |
|
SU50063A1 |
| Станок для одновременной распиловки в поперечном направлении длинных древесных сортаментов на части | 1924 |
|
SU1393A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1993 |
|
RU2084331C1 |
| Устройство для поштучной выдачи материалов из штабеля | 1959 |
|
SU123465A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
Изобретение относится к устр- вам для двустороннего сталкивания бревен с продольного конвейера и м.б. использовано в линиях сортировки бревен на участках подготовки сырья на предприятиях лесной и деревообрабатывающей промышленности. Цель Г5 снижение энергоемкости и повышение надежности работы устройства. Для этого кинематическая связь сталкивающих левого и правого рычагов с выход- ным валом (ВВ) 7 электромеханического ,. реверсивного привода вращения выполнена в виде двух опорных концентрически расположенных валов 8, 9. Последние связаны кинематически с ВВ 7 посредством храповых муфт 12 и 13 и рычажных механизмов в виде коромысел 14 и шарнирно жестко смонтированного на ВВ 7 храпового колеса (ХК), храповой собачки и диска 21 (22). При включении электродвигателя 23 ВВ 7 приводит во вращение ХК, одно из которых обеспечивает поворот диска 21 на угол 180°, равный повороту ХК. Другое ХК, поворачиваясь,оставляет диск 22 неподвижным. При повороте диска 21 зубья ХК через коромысло 14 и элементы 15, 16 поворачивают опорный вал 8 и правые сталкивающие рычаги, которые взаимодействуют с бревном и сталкивают его с конвейера. 1 з.п. ф-лы. 4 ил. / -А S (Л Од О9 UD 00
дид Б
фигЗ
ВиЗВ
сриеЛ
| ДВУСТОРОННИЙ СБРАСЫВАТЕЛЬ БРЕВЕН | 0 |
|
SU346202A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Автоматическая .линия сортировки бревен | |||
| Чертеж № 713455, Фирма Rauma-Repola | |||
| Финляндия, 1984. | |||
