00
to ел
4i
Изобретение относится к грузозахватным электромагнитным устройствам .и может быть наиболее эффективно ис- пользовано для захвата и удержания магнитных материалов.
Цель изобретения - повышение производительности, уменьшения металлоемкости и обеспечение постоянства добротности при увеличении грузоподъемности.
На фиг.1 показан захват с одной парой внутренних полюсов, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фцг.1; на фиг.4 - захват в режиме концентрированного магнитного поля; на фигГЗ - то же, в режиме распределенного м-агнитного поля на фиг.6 - захват с четырьмя парами внутренних полюсов, общий вид; на фиг,7 - ВИД В на фиг.6; -на фиг.8 - се.чение Г-Г на фиг.6; на фиг.9 - захват с четырьмя парами полюсов в режиме концентрированного магнитного по
ля; на фиг. 10 - то же, в режиме рас- пределенного магнитного поля; на фиг.П - расположение полярности внутренних полюсов в плане в режиме концентрированного магнитного поля; йа фиг. 12 - то же, в режиме распр.еде.ления магнитного поля; на фиг.13 - то же, в комбинированном режиме.
Магнитный захват (фиг.1) содержит П-образный прямоугольный корпус 1, внутренние прямоугольные полюсы 2 и 3, катушки 4 .и 5. управления, защитные пластины 6, защитную немагнитную шайбу 7, клеммную коробку 8 и проушины -9.
Магнитный захват, изображенный на фиг.6, содержит П-образной корпус прямоугольной формы из магнитомягкр- го материала, полюсы 2,3,10,11,12, 13,14,15 внутренние прямоугольной формы из магнитомягкого материала, катушки 4,5,16,17,18,19,20,21 управления, защитные пластины 6, защитную немагни.тную шайбу 7, клеммную коробку 8 и проушины 9.
После установки магнитного захва- та (фиг.1) на поверхность поднимаемого груза обмотки катушек 4 и 5 управления тподключают к ист очнику питания. При протекании тока по обмоткам последние создают магнитный поток (t, - Ф;) (фиг.4 и 5), который замы- кается через соответствующие части магнитопровода магнитного захвата и Ч1ерез поднимаемый груз, в. результате
чего в рабочем воздушном зазоре cfg возникает усилие притяже}шя поднимаемого груза к рабочей поверхности магнитного захвата..
В работе предлагаемого магнитного захвата различают два режима:, режим концентрированного магнитного поля; и режим распределенного магнитного поля.
в режиме концентрированного магнитного поля (фиг.4) напряжени.е на катушки управления цодается таким образом, что полярность рнутренних поюсов 2 и 3 становится одинаковой. При этом магнитный поток Ф, , созданный катушкой 4 управления, замыкается через внутренний полюс 2, поднимаемый груз и внешний полюс (левую боковую стенку магнитного захвата), а поток Ф. созданный катушкой 5 управления, замыкается через внутренний полюс 3, поднимаемый груз и внешний полюс (правую боковую стенку маг-- нитнрго захвата), В этом режиме реа- изуется максимально возможное уси- лие, развиваемое магнитным захватом.
В режиме распределенного магнитного поля . (фиг,5) напряжение на катушки 4. и 5 управления подается та-- КИМ образом, что полярность внутренних полюсов 2 и 3 становится разной. . При этом магнитные потоки замыкаются: через внутренние полюсы 2 и 3 и поднимаемый груз - поток через внутренний полюс 2, поднимаемый груз 4 и внешний полюс (левую боковую стенку магнитного захвата) - поток j; через внутренний полюс 3, поднимаемый груз 10 и внешний полюс (правую боковую стенку .магнитного захвата) поток 5
После установки магнитного захва- . та с четырьмя парами полюсов (фиг,7) на поверхность поднимаемого груза обмотки катушек 4,5,16,17,18,19,20 и 21 управления подключают к источнику питания. При протекании по катушкам тока последние создают магнитные по- токи Ф - Фз (фиг,4 и 5), которые замыкаются через с- ответствующие части магнитопровода магнитного захвата и через поднимаемый груз, в результате чего в рабочем воздушном зазоре cCj возникает усилие притяжения под-, нимаемого к рабочей поверхности магнитного захвата.
В работе предлагаемого магнитного захвата различают режимы концентриро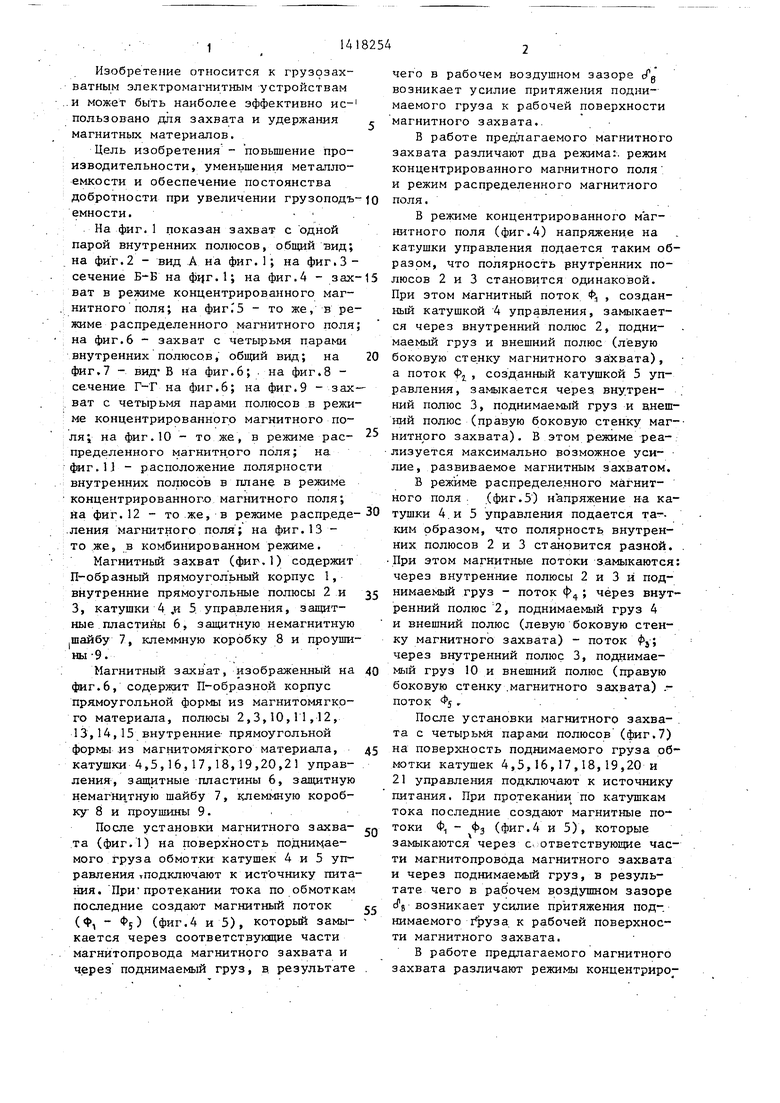

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Магнитный захват | 1980 |
|
SU1082744A1 |
| ГРУЗОПОДЪЕМНЫЙ ЭЛЕКТРОМАГНИТ | 2006 |
|
RU2317244C1 |
| Грузозахватный постоянный магнит | 1990 |
|
SU1778059A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ГРУЗОПОДЪЕМНЫЙ ЭЛЕКТРОМАГНИТ | 2003 |
|
RU2255893C1 |
| ГРУЗОЗАХВАТНЫЙ ЭЛЕКТРОМАГНИТ | 1999 |
|
RU2159209C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| ГРУЗОЗАХВАТНЫЙ МАГНИТ | 1995 |
|
RU2111160C1 |
| Способ бездатчикового определения наличия/отсутствия груза в магнитном захвате грузозахватного устройства | 2024 |
|
RU2834851C1 |




Изобретение относится к подъемно-транспортному машиностроению, в частности к электромагнитным подъемным устройствам. Целью изобретения является повьшение производительности работы и снижение металлоемкости грузозахвата. Магнитный захват содержит корпус 1, в котором смонтированы по крайней мере два прямоугольных в плане и параллельных между собой внутренних полюса 2 и 3 с катушками управления соответственно 4 и 5. Внутренние полюсы установлены таким образом, что обращенными одна к другой являются их большие грани, а меньшие расположены в одной вертикальной плоскости, а площадь рабочей поверхности двух соседних внутренних полюсов равна площади рабочей поверхности наружного магнитопровода, образованного стенками корпуса 1. Такое положение полюсов позволяет при подаче на катушки управления различных сигналов получить распределенное, концентрированное и промежуточное магнитное поле для захвата различно расположенных ферромагнитных изделий, 3.п. ф-лы, I3 ил. 
фиг. 2
Ф
Фие.
Z 5
Фиг. 5
Вид В
Ч 7 2 V
Ю 16 12 8 V W Ф//г.
15
Фиг: 7
Г- г
2
10 16 18
Фие.Ш
Фие. 11
Фие.З
Фиг.
Фиг. 73
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2366919C1 |
| Способ получения коричневых сернистых красителей | 1922 |
|
SU335A1 |
