Предлагаемое изобретение относится к магнитным грузозахватным и грузоподъемным устройствам, а именно к магнитным захватам (схватам) с постоянным магнитом (магнитами) и обмоткой управления, которые осуществляют захват (подъем), длительное удержание при транспортировании (переносе) и последующее отпускание (сброс) ферромагнитных грузов в робототехнических устройствах и комплексах различного назначения, преимущественно с дистанционным управлением, и в частности к бездатчиковому определению наличия/отсутствия груза в магнитном захвате (схвате) с постоянными магнитами грузозахватного или грузоподъемного устройства.
При дистанционной работе автоматизированных или автоматических грузозахватных и грузоподъемных устройств (далее - ГЗУ) в различных условиях применения, в т.ч. окружающей среды, актуальной является информация о наличии/отсутствии груза в их магнитных захватах (далее - МЗ), т.е. о выполнении ГЗУ и соответственно МЗ в процессе работы (эксплуатации) своей прямой функции захвата (подъема), длительного удержания при транспортировании (переносе) и отпускания (сброса) груза.
В различных по принципу действия, степени автоматизации и техническим решениям как конструкций ГЗУ, так и их захватов (схватов) в составе робототехнических устройств и комплексов различного назначения определение наличия/отсутствия груза в захватах (схватах) ГЗУ в процессе их работы решается преимущественно локационными и визуальными (техническое зрение) методами, которые реализуются известными бесконтактными способами, описанными в многочисленных научно-технических публикациях и в описаниях изобретений, например в [1-9]. Эти способы заключаются в том, что первоначально создают - генерируют физическую среду - процесс или энергию различной природы, затем измеряют параметры этой среды (энергии) и (или) их изменение в зависимости от пространственного расположения груза относительно захвата (схвата) ГЗУ, затем преобразуют эти параметры в эквивалентные, как правило, электрические сигналы, далее передают их в приборы (блоки) управления ГЗУ, в которых их обрабатывают или преобразуют и устанавливают условия по величинам или изменениям этих сигналов, по которым далее судят о захвате и удержании (наличии) или отпускании (отсутствии) груза в захвате (схвате) в процессе работы ГЗУ.
Реализация указанных известных бесконтактных способов осуществляется благодаря принципиальным (физическим) и техническим решениям самостоятельных автономных информационных устройств - датчиков - измерителей (далее - датчики). Эти датчики и (или) их элементы (составные части) устанавливают на захвате (схвате) ГЗУ или на конструктивных узлах ГЗУ или на грузе. При этом влияние на достоверность-точность выработки указанной информации для определения наличия/отсутствия груза в захвате (схвате) ГЗУ, снижая ее уровень, оказывает качество (свойства) окружающей груз и захват (схват) ГЗУ среды.
Другими известными методам определения наличия/отсутствия груза в ГЗУ и соответственно в их захватах (схватах) в процессе работы являются тактильные методы, преимущественно механические и силомоментные, которые реализуются известными контактными способами, также описанными в многочисленных научно-технических публикациях и в описаниях изобретений, например в [3-6,10,11], и заключаются в том, что формируют сигнальную электрическую цепь от прибора (блока) управления ГЗУ, в которую монтируют контакт замыкателя электрической цепи или датчик с переменным электрическим сопротивлением или переменной электрической емкостью, которые устанавливают на ГЗУ и (или) на захват (схват) и подключают их электрические выходы к прибору (блоку) управления ГЗУ. Затем запитывают от источника электропитания прибора (блока) управления ГЗУ сигнальную электрическую цепь или датчик, преобразуют и фиксируют в приборе (блоке) управления ГЗУ от цепи контакта замыкателя или на выходе датчика значение начальной величины выходного сигнала, принимают его соответствующим отсутствию груза, затем осуществляют захват и удержание груза, при котором в результате механического взаимодействия (контактирования) с грузом при его захвате и удержании контакт замыкателя электрической цепи замыкается, что фиксируется прибором (блоком) управления ГЗУ по прохождению сигнала через замкнутый контакт замыкателя, или изменяется величина выходного сигнала датчика, в результате чего значение начальной величины выходного сигнала (в т.ч. преобразованного) изменяется, его нормируют в приборе (блоке) управления ГЗУ и устанавливают по нему условие, по которому судят о захвате, удержании (наличии) или отсутствии (отпускании) груза в процессе работы ГЗУ.
Реализация этих контактных способов осуществляется благодаря принципиальным (физическим) и техническим решениям также самостоятельных или автономных устройств - замыкателей электрической цепи или силомоментных датчиков, которые вырабатывают, преобразуют и (или) передают информационные сигналы в приборы (блоки) управления ГЗУ. Эти устройства и (или) их элементы (составные части) устанавливают на захвате (схвате) ГЗУ (или конструктивных узлах ГЗУ), а также могут устанавливаться и на грузе, но при обязательном тактильном взаимодействии захвата (схвата) ГЗУ с грузом.
Указанные выше бесконтактные и контактные способы определения наличия/отсутствия груза в захватах (схватах) ГЗУ, реализация которых основана на принципиальных (физических) и (или) технических решениях применяемых самостоятельных или автономных датчиков, не связаны непосредственно с физическими процессами функционирования (работы) захвата (схвата) ГЗУ, посредством которых реализуются функции и работоспособность ГЗУ по захвату (подъему), длительному удержанию при транспортировании (переносе) и отпусканию (сбросу) груза.
Известен, заявленный в [12], способ бездатчикового контроля наличия ферромагнитного или немагнитного груза - детали в пневмомеханических механизмах захвата (схвата) ГЗУ робота с электроприводом управления динамическим перемещением захвата (схвата), основанный на изменении электроприводом ускорения движения механизма захвата (схвата) детали-груза при наличии (замедление ускорения) и при отсутствии (увеличение ускорения) в нем детали-груза при условии неизменности параметров питания и управления электропривода, заключающийся в том, что формируют в приборе (блоке) управления ГЗУ команду электроприводу на заданное движение (перемещение) механизма захвата (схвата) без детали-груза и, выполняя его, определяют в приборе (блоке) управления ГЗУ величину ускорения по измеренному датчиком перемещения электропривода значению скорости перемещения механизма захвата (схвата), фиксируют и нормируют в приборе (блоке) управления ГЗУ эту величину ускорения и принимают ее за эталонную, затем по команде прибора (блока) управления ГЗУ осуществляют захват детали-груза и приводят электроприводом в то же заданное движение (перемещение) механизм захвата (схвата) с деталью-грузом, определяют в приборе (блоке) управления ГЗУ величину его ускорения (по измеренному значению скорости перемещения) и сравнивают ее с эталонной величиной ускорения, по разности между ними судят о наличии/отсутствии детали-груза в захвате (схвате) ГЗУ, и далее, в процессе работы ГЗУ выполняют рабочие циклы захвата механизмом захвата (схвата) детали-груза, его транспортирования и отпускания с определением величин ускорения по измеренным значениям скорости перемещения механизма захвата (схвата) с деталью-грузом, сравнивают ее с эталонной, а по разности между ними судят о наличии/отсутствии детали-груза в захвате (схвате) ГЗУ.
Достоинством этого способа [12] на первый взгляд является отсутствие необходимости в использовании и размещении дополнительно самостоятельного или автономного датчика наличия/отсутствия детали-груза в механизме захвата (схвата) ГЗУ; однако это не так, поскольку наличие/отсутствие детали-груза в механизме захвата (схвата) ГЗУ определяется только в процессе динамического перемещения механизма захвата (схвата), а непосредственно фактическое определение выполнения или невыполнения захвата (наличия) или отпускания (отсутствия) механизмом захвата (схвата) детали-груза не осуществляется, для этого необходим в ГЗУ или в его захвате (схвате) дополнительно самостоятельный или автономный, например силомоментный, датчик захвата-отпускания детали-груза.
Известны многочисленные по техническим и конструктивным решениям МЗ с электроимпульсным управлением - электроимпульсные МЗ ГЗУ с постоянными магнитами, описанные, например, в [13-28], для захвата, длительного удержания при транспортировании и последующего отпускания (сброса) ферромагнитных грузов. Магнитная цепь этих МЗ ГЗУ образована ферромагнитным сердечником, полюсом (сердечниками, полюсами или сердечниками с полюсами), ярмом, а также встроенным в неё одним или несколькими неперемагничиваемыми и (или) перемагничиваемыми постоянными магнитами, являющимися источником образования магнитного потока намагничивания - рабочего магнитного потока в магнитной цепи МЗ ГЗУ. Благодаря этому при замыкании ферромагнитным грузом магнитной цепи МЗ ГЗУ создается притягивающая сила (сила удержания) ферромагнитного груза при его захвате и длительном удержании. Эти МЗ ГЗУ содержат обмотку намагничивания (перемагничивания) или обмотки управления (регулирования) в виде катушек (далее - обмотка-катушка), охватывающих часть магнитной цепи МЗ ГЗУ, а именно сердечник, сердечники или сердечники с полюсами и (или) перемагничиваемые постоянные магниты.
Указанную обмотку-катушку (обмотки-катушки) намагничивания (перемагничивания) или обмотку управления (регулирования) ориентируют своей плоскостью перпендикулярно (ортогонально) направлению магнитного потока намагничивания - рабочего магнитного потока в магнитной цепи МЗ и осуществляют электрическим импульсом напряжения, достаточно продолжительной длительности прямой полярности при их подключении к электрической цепи источника питания постоянного тока, соответствующее перемагничивание (намагничивание) перемагничиваемых постоянных магнитов для создания требуемого и (или) максимального рабочего магнитного потока и соответственно требуемой и (или) максимальной притягивающей силы (силы удержания) ферромагнитного груза для его захвата и длительного удержания при транспортировании. Этим же электрическим импульсом напряжения достаточно продолжительной длительности но обратной полярности осуществляют соответствующее обратное перемагничивание перемагничиваемых постоянных магнитов для ослабления (демпфирования) или перенаправления (замыкания на себя) рабочего магнитного потока (магнитного потока намагничивания) от неперемагничиваемых постоянных магнитов в магнитной цепи (в магнитопроводе) МЗ ГЗУ, благодаря чему рабочий магнитный поток значительно уменьшается и соответственно значительно уменьшается притягивающая сила МЗ ГЗУ (сила удержания груза) и происходит отпускание (сброс) ферромагнитного груза под действием его собственного веса. Определение (способов определения) наличия/отсутствия ферромагнитного груза в принципиальных и технических решениях указанных электроимпульсных МЗ ГЗУ [13-27] не предусмотрено и невозможно без применения описанных выше бесконтактных или контактных способов определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, реализуемых только с помощью самостоятельных или автономных датчиков, что требует их встраивания в принципиально-технические решения и конструкции этих электроимпульсных МЗ ГЗУ.
Тем не менее, в техническом и конструктивном решении ГЗУ с электроимпульсным МЗ, например в подъемнике (ГЗУ) с электропостоянными магнитами, снабженном предохранительным устройством [28], указано, что дополнительно в МЗ монтируют соосно с обмоткой-катушкой управления (регулирования) одну или несколько обмоток-катушек с охватом ими ферромагнитного сердечника или сердечника с полюсом, при этом плоскость обмотки-катушки или обмоток-катушек ориентируют перпендикулярно направлению магнитного потока намагничивания - рабочего магнитного потока в магнитной цепи МЗ ГЗУ. Эта обмотка-катушка или несколько обмоток-катушек выполняют функции датчика - измерителя изменения рабочего магнитного потока в магнитной цепи (в магнитной системе, в магнитопроводе) МЗ ГЗУ, связанного с ферромагнитным грузом при его захвате.
Аналогично в предохранительном устройстве для подъема магнитов [29] в его МЗ ГЗУ смонтирована измерительная обмотка-катушка того же назначения и той же функции, что в МЗ ГЗУ по [28].
В МЗ ГЗУ указанных устройств [28, 29], преимущественно в процессе (при выполнении процедуры) захвата ферромагнитного груза, создают в магнитной цепи МЗ ГЗУ рабочий магнитный поток, в процессе нарастания которого в одной или нескольких измерительных обмотках-катушках наводится, согласно закона Фарадея, индуцированное напряжение, пропорциональное этому изменению рабочего магнитного потока. По интегральной величине этого индуцированного напряжения определяется расчетом значение притягивающей силы (силы удержания) МЗ ГЗУ ферромагнитного груза, по которому косвенно судят о наличии (захвате) ферромагнитного груза МЗ и о достаточности созданной МЗ ГЗУ притягивающей силы (силы удержания).
В частности в ГЗУ [28] подготавливают магнитную цепь МЗ для замыкания магнитной цепи через ферромагнитный груз, для чего МЗ примыкают (пристыковывают) к ферромагнитному грузу, затем на обмотку-катушку управления (регулирования) перемагничиваемых постоянных магнитов подают, путем подключения к источнику питания постоянного тока, электрический импульс напряжения перемагничивания достаточно продолжительной длительности, и перемагничиваемый постоянный магнит перемагничивается, благодаря чему в магнитной цепи (в магнитной системе, в магнитопроводе) МЗ создается рабочий магнитный поток (преимущественно максимальный), замыкающийся через ферромагнитный груз, и МЗ ГЗУ развивает соответствующую рабочему магнитному потоку притягивающую силу (силу удержания) ферромагнитного груза, а в измерительной же обмотке-катушке этим нарастающим рабочим магнитным потоком под действием указанного электрического импульса (достаточно продолжительной длительности) индуцируется напряжение, которое усиливают усилителем, преобразуют аналого-цифровым преобразователем (АЦП) в цифровую форму и определяют путем расчета по заданному алгоритму в микропроцессорном устройстве (контроллере) блока управления ГЗУ, через вычисление в нем величины магнитной индукции, расчетную величину ожидаемой притягивающей силы (силы удержания) МЗ ферромагнитного груза. По этой расчетной величине ожидаемой притягивающей силы (силы удержания) косвенно судят, путем сравнения с заранее известным весом ферромагнитного груза, как о ее достаточности с соответствующим коэффициентом запаса, так и о безопасности работы МЗ ГЗУ при подъеме этого ферромагнитного груза из предположения, что ферромагнитный груз захвачен. Вместе с тем в [28] указано, что в качестве датчика - измерителя рабочего магнитного потока в магнитной цепи (в магнитопроводе) электроимпульсного МЗ ГЗУ, как альтернатива измерительным обмоткам-катушкам, может быть применен самостоятельный элемент - датчик Холла, по выходному сигналу которого, пропорциональному установившейся величине рабочего магнитного потока, созданного постоянными магнитами, также определяют, путем расчета по заданному алгоритму в микропроцессорном устройстве (контроллере) блока управления ГЗУ, через вычисление в нем величины магнитной индукции, расчетную величину ожидаемой притягивающей силы (силы удержания) МЗ ГЗУ ферромагнитного груза и косвенно судят как о ее достаточности путем сравнения с заранее известным весом груза с соответствующим коэффициентом запаса, так и о безопасности работы МЗ ГЗУ при подъеме ферромагнитного груза из предположения, что ферромагнитный груз захвачен.
Следует отметить, что в [28, 29], также как указывалось и в выше описанных способах и устройствах [13-27], не предусмотрены (не указаны) возможности и способы-процедуры определения наличия/отсутствия ферромагнитного груза в электроимпульсных МЗ ГЗУ в процессе захвата (подъема), длительного удержания при транспортировании (переносе) и отпускания (сброса) при работе МЗ ГЗУ, поскольку описанные в [28, 29] принципиальные и технические решения электроимпульсных МЗ ГЗУ не позволяют обеспечить на физическом уровне такое определение, а соответственно не обеспечивают должный уровень безопасности захвата (подъема), удержания при транспортировании (переносе) и отпускания (сброса) ферромагнитного груза.
Известно техническое решение МЗ ГЗУ - магнитоэлектрический захват [30] ГЗУ с постоянным магнитом (далее - МЭЗ), преимущественно по конфигурации цилиндрический, для захвата, длительного удержания при транспортировании и последующего отпускания (сброса) ферромагнитных грузов в робототехнических устройствах различного назначения, содержащего неперемагничиваемый высококоэрцитивный постоянный магнит, являющийся источником магнитного потока намагничивания - рабочего магнитного потока в МЭЗ ГЗУ, обмотку-катушку управления и магнитную цепь, которая образована примыкающими и закрепленными последовательно друг к другу, по контуру замыкания при захвате (наличии) ферромагнитного груза МЭЗ рабочего магнитного потока, цилиндрическим Т-образным магнитопроводом сердечника с поперечным полюсом, кольцом однонаправленного по намагничиванию в осевом направлении постоянного магнита (магнитов) и кольцевым наружным полюсом. Обмотка-катушка управления МЭЗ размещена (намотана) на цилиндрической поверхности основания Т-образного магнитопровода сердечника, охватывая его. Плоскость обмотки-катушки управления МЭЗ перпендикулярна (ортогональна) направлению рабочего магнитного потока в Т-образном магнитопроводе сердечника магнитной цепи МЭЗ ГЗУ.
Благодаря образованному постоянным магнитом рабочему магнитному потоку при замыкании ферромагнитным грузом магнитной цепи МЭЗ создается притягивающая сила (сила удержания) ферромагнитного груза, большая, чем его вес, и происходит захват и длительное удержание груза. При этом магнитное сопротивление магнитной цепи (магнитопровода) МЭЗ ГЗУ рабочему магнитному потоку от постоянного магнита при его прохождении через ферромагнитный груз при его захвате намного меньше магнитного сопротивления рабочему магнитному потоку от постоянного магнита, замыкающемуся через наружный полюс, поперечный полюс и верхнюю часть (плоское ярмо) Т-образного магнитопровода сердечника при отсутствии (сбросе) ферромагнитного груза в МЭЗ.
Отпускание (сброс) ферромагнитного груза в МЭЗ осуществляется за счет подачи от источника питания постоянного тока в обмотку-катушку управления МЭЗ непродолжительного (короткого) и незначительного по величине импульса электрического тока, в результате чего образуется магнитный поток, который замыкается в ненасыщенной в магнитном отношении магнитной цепи (магнитопроводе) МЭЗ и который направлен встречно рабочему магнитному потоку в наружном полюсе и в сердечнике, а в поперечном полюсе направлен с ним согласно, тем самым обеспечивается отведение рабочего магнитного потока постоянного магнита в МЭЗ от ферромагнитного груза. В результате рабочий магнитный поток, проходящий через ферромагнитный груз, а с ним и притягивающая сила (сила притяжения) МЭЗ, уменьшаются вплоть до ноля и ферромагнитный груз под действием собственного веса отделяется (сбрасывается).
Определение (способы определения) наличия/отсутствия ферромагнитного груза в МЭЗ ГЗУ [30] в процессе работы не предусмотрено и возможно только при применении известных и описанных выше бесконтактных или контактных способов определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, реализуемых только с помощью самостоятельных или автономных датчиков, что требует их встраивания в конструкцию МЭЗ ГЗУ.
Таким образом, определение наличия/отсутствия ферромагнитного груза при его захвате (подъеме), длительном удержании при транспортировании (переносе) и последующем отпускании (сбросе) в описанных выше различных МЗ ГЗУ, в частности в электроимпульсных и в магнитоэлектрическом, возможно только известными и описанными выше бесконтактными или контактными способами определения наличия/отсутствия груза, и только при их реализации на основе применения самостоятельных или автономных датчиков - измерителей, что обуславливает необходимость их встраивания в принципиально-технические решения и конструкции этих МЗ ГЗУ, а это в свою очередь определяет усложнение их конструкций и соответственно понижает их надежность (безотказность) и долговечность, а также предполагает подверженность влиянию и зависимость от качества (свойств) окружающей среды, что определяет невысокие достоверность и точность определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ при применении самостоятельных или автономных датчиков.
Вместе с тем, является весьма важным то обстоятельство, что необходимо обеспечить при работе ГЗУ не только сам процесс определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ при его захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе), но и его повторяемость (непрерывность) в этом процессе, что в свою очередь должно обеспечивать повышение безопасности при захвате (подъеме), переносе (транспортировании) и отпускании (сбросе) ферромагнитного груза МЗ ГЗУ. Это предполагает, по мнению авторов, связь самого процесса определения наличия/отсутствия ферромагнитного груза с физическими процессами функционирования (работы) самого МЗ ГЗУ, посредством которых реализуются его функции и работоспособность по захвату (подъему), длительному удержанию при транспортировании (переносе) и отпусканию (сбросу) ферромагнитного груза.
Разрешения указанных технических противоречий, недостатков и проблем являются задачами заявляемого изобретения, которые могут быть решены, по мнению авторов, только за счет предложения и реализации нового способа, как нового средства, бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ согласно заявляемому изобретению, в т.ч. расширяющего арсенал средств такого назначения, поскольку проведенный поиск в научной и технической литературе, в интернет-ресурсах и патентно-информационный поиск не выявил известных научно-технических решений, близких аналогов и прототипа по предлагаемому авторами нового способа.
Таким образом, решаемая заявляемым изобретением техническая проблема заключается в необходимости создания впервые нового способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, в т.ч. расширяющего арсенал средств этого назначения (предназначения) - определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, расширяющего функциональные возможности известных технических решений ГЗУ с МЗ различного типа, устраняющего недостатки описанных выше известных способов определения наличия/отсутствия ферромагнитного груза и технических решений МЗ ГЗУ, упрощающего определение наличия/отсутствия ферромагнитного груза в МЗ в процессе работы ГЗУ и, соответственно, упрощающего конструкции МЗ ГЗУ в частности и в целом.
Использование заявляемого изобретения также обеспечивает повышение достоверности и точности определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, а также безопасности при захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе) ферромагнитного груза МЗ ГЗУ. Кроме того, обеспечивается повышение надежности и существенно снижение влияния (зависимости от качества и свойств) окружающей среды на процесс определения наличия/отсутствия ферромагнитного груза.
Технический результат достигается благодаря предлагаемому авторами нового технического решения - нового способа бездатчикового определения наличия/отсутствия как ферромагнитного груза в МЗ ГЗУ, так и немагнитного груза, но с закрепляемой на нем соответствующей ферромагнитной пластиной (диском).
Предлагаемый способ предполагает использование физических процессов функционирования (работы) МЗ ГЗУ и частей их устройств по захвату (подъему), длительному удержанию при транспортировании (переносу) и отпусканию (сбросу) ферромагнитного груза:
- без применения (использования) самостоятельных или автономных датчиков,
- с использованием имеющейся в МЗ ГЗУ обмотки-катушки управления (регулирования, намагничивания, перемагничивания) или измерительной обмотки-катушки (далее - обмотка-катушка управления).
Предлагаемый способ основан на явлении самоиндукции (Дж. Генри), возникающем при приложении электрического напряжения от источника питания постоянного тока к электрической цепи обмотки-катушки. Под действием этого электрического напряжения в обмотке-катушке МЗ ГЗУ, которая охватывает часть его магнитной цепи, а именно ферромагнитный сердечник (сердечники, сердечники с полюсами и т.п.) или перемагничиваемый постоянный магнит, возникающий электрический ток образует магнитный поток самоиндукции, являющийся первопричиной, под нарастающим действием которого в ней же наводится электродвижущая сила самоиндукции, ограничивающая (как считается) нарастание по времени указанного электрического тока в обмотке-катушке МЗ ГЗУ, степень же ограничения этого нарастания определяется коэффициентом самоиндукции (индуктивностью), а сам этот магнитный поток самоиндукции зависит от магнитной проницаемости (магнитного сопротивления) магнитной цепи МЗ, в которой он замыкается [31 (с. 160-161), 32 (с. 242), 33 (с. 80)].
В нашем случае магнитная цепь - это магнитопровод МЗ ГЗУ, в котором замыкается рабочий магнитный поток. Магнитная цепь - магнитопровод МЗ ГЗУ будет иметь минимальное магнитное сопротивление для рабочего магнитного потока при примыкании (захвате, удержании) ферромагнитного груза к МЗ ГЗУ, т.е. магнитная цепь МЗ замкнута через ферромагнитный груз. Тогда обмотка-катушка управления в МЗ ГЗУ будет иметь максимальную индуктивность. Магнитное сопротивление магнитной цепи - магнитопровода МЗ ГЗУ будет максимальным при отсутствии (сбросе) ферромагнитного груза, т.е. магнитная цепь МЗ ГЗУ для рабочего магнитного потока разомкнута, поскольку между ферромагнитным грузом и МЗ ГЗУ будет иметь место немагнитный зазор в виде воздушной, жидкой или иной среды, и соответственно обмотка-катушка МЗ ГЗУ будет иметь минимальную индуктивность.
Поскольку переходные процессы за время Т - процессы нарастания электрического тока в обмотке-катушке управления МЗ ГЗУ в функции времени (от момента приложения к ней напряжения от источника питания постоянного тока и далее под его действием) будут отличаться при максимальном и минимальном магнитном сопротивлении магнитной цепи - магнитопровода МЗ ГЗУ, то по величине максимальной разности мгновенных значений электрического тока в обмотке-катушке управления МЗ ГЗУ в определенный момент времени возможно однозначно идентифицировать - определить соответственно отсутствие (сброс) или наличие (захват, удержание) ферромагнитного груза в МЗ ГЗУ.
Предлагаемый способ бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ с постоянным магнитом (магнитами) заключается в том, что первоначально получают расчетом или измерением значения индуктивностей электрической цепи обмотки-катушки управления магнитного захвата Lо и Lн, охватывающей соосно часть магнитной цепи магнитного захвата, преимущественно сердечник, и своей плоскостью перпендикулярно направлению рабочего магнитного потока в ней, соответственно при отсутствии (Lо) и при наличии (Lн) в магнитном захвате груза, получают расчетом или измерением значение сопротивления постоянному току электрической цепи обмотки-катушки управления R, определяют расчетом по полученным значениям Lо, Lн и R постоянные времени τо и τн электрической цепи обмотки-катушки соответственно при отсутствии (τо) и при наличии (τн ) в магнитном захвате груза, получают расчетом значение такого i-ого момента времени ТUm в пределах интервала времени равного или не менее τн от момента приложения к электрической цепи обмотки-катушки управления напряжения значением U от источника питания постоянного тока и мгновенные значения сил тока в ней в этот момент времени ТUm при отсутствии груза в магнитном захвате Iоim и при его наличии Iнim, используя полученные значения R, τо и τн, при котором разность мгновенных значений сил тока Iоim и Iнim достигает максимального значения, следующим образом:
 ,
,
 ,
,
 ,
,
или получают измерением значение i-ого момента времени ТUm и мгновенные значения сил тока Iоim и Iнim в этот момент времени ТUm, при котором их разность достигает максимального значения, для чего подключают к источнику питания постоянного тока электрическую цепь обмотки-катушки управления магнитного захвата, прикладывают к ней напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой магнитного потока с направлением рабочего магнитного потока в магнитной цепи магнитного захвата при захвате им груза, т.е. противоположной полярности напряжения, прикладываемого к обмотке-катушке магнитного захвата для сброса им груза, и измеряют последовательно в i-ые моменты времени ТUi в пределах интервала времени не менее τн от момента приложения к ней напряжения значением U мгновенные значения сил тока в электрической цепи обмотки-катушки управления Iоi и Iнi по мере их нарастания в ней, соответственно, при отсутствии груза в магнитном захвате (Iоi) и при его наличии (Iнi), определяют из полученных измеренных значений сил тока Iоi и Iнi при соответствующих им i-ых моментах времени ТUi такое значение силы тока Iоim и такое значение силы тока Iнim и соответствующий им один i-ый момент времени ТUm от момента приложения к электрической цепи обмотки-катушки напряжения значением U, при которых разность Iоim и Iнim будет максимальной, затем вычисляют из полученных расчетом или измерением значений сил тока Iоim и Iнim полусумму Iп, далее в процессе захвата и удержания груза, при и после его отпускания прикладывают к электрической цепи обмотки-катушки управления магнитного захвата от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой магнитного потока с направлением рабочего магнитного потока в магнитной цепи магнитного захвата при захвате им груза, на время длительностью не менее удвоенного значения ТUm от момента его приложения, измеряют в момент времени ТUm значение силы тока Iи, протекающего в электрической цепи обмотки-катушки управления, сравнивают полученное значение Iи со значением Iп и судят о наличии груза в магнитном захвате, если полученное значение Iи меньше Iп или о его отсутствии, если полученное значение Iи больше Iп.
ТUi - любые i-ые моменты времени от момента приложения к электрической цепи обмотки-катушки магнитного захвата ГЗУ напряжения значением U. Под i-ым моментом времени в пределах времени переходного процесса Т нарастания силы тока в обмотке-катушке управления МЗ ГЗУ понимается разбиение этого времени Т на i-ые интервалы достаточно большим числом от момента приложения (Т равно нулю) к электрической цепи обмотки-катушки управления напряжения от источника питания постоянного тока.
В формуле изобретения и в его описании приведены также альтернативные признаки через слово «или», а именно «получаемые расчетом или получаемые измерением», которые в совокупности и в последовательности с такими же альтернативными признаками, обеспечивают получение одного и того же технического результата, в частности, в предлагаемом изобретении в завершающей части последовательностей действий, согласно формуле изобретения, получают измерением численные значения параметров при захвате МЗ ГЗУ груза, по которым судят (идентифицируют) как о наличии груза в МЗ ГЗУ, так и о его отсутствии, а именно вычисляют из полученных расчетом или измерением значений сил тока Iоim и Iнim полусумму Iп, далее в процессе захвата и удержания груза, при и после его отпускания прикладывают к электрической цепи обмотки-катушки управления МЗ ГЗУ от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой магнитного потока с направлением рабочего магнитного потока в магнитной цепи МЗ ГЗУ при захвате им груза, на время длительностью не менее удвоенного значения ТUm от момента его приложения, измеряют в момент времени ТUm значение силы тока Iи, протекающего в электрической цепи обмотки-катушки управления, сравнивают полученное значение Iи со значением Iп и судят о наличии груза в МЗ ГЗУ, если полученное значение Iи меньше Iп или о его отсутствии, если полученное значение Iи больше Iп.
При реализации предлагаемого нового способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ в соответствии и в последовательности с существенными признаками согласно формуле изобретения, отдельными и в совокупности, обеспечивается его предназначение (назначение) и одновременно обеспечивается расширение арсенала средств этого назначения, а именно однозначное и неоднократное определение наличия/отсутствия ферромагнитного груза в МЗ ГЗУ в процессе его работы при захвате (подъеме) им, длительном удержании при транспортировании (переносе) и отпускании (сбросе) ферромагнитного груза.
Реализация в упомянутых выше различных технических и конструктивных решениях МЗ ГЗУ [16, 22, 28, 29, 30] предлагаемого нового способа с использованием имеющейся в контуре магнитной цепи с рабочим магнитным потоком этих МЗ ГЗУ обмотки-катушки управления без каких-либо самостоятельных или автономных датчиков существенно упрощает технические решения и конструкции МЗ ГЗУ, повышает их надежность (безотказность) и долговечность работы, одновременно расширяет функциональные возможности этих МЗ ГЗУ за счет реализации ими новой дополнительной функции - бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ в процессе их работы (эксплуатации). При этом повышается достоверность и точность определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ за счет исключения влияния и зависимости от окружающей среды в условиях работы (эксплуатации) МЗ ГЗУ, а также обеспечивается на физическом уровне многократная повторяемость определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ в процессе его захвата (подъема), длительного удержания при транспортировании (переносе) и отпускания (сброса), что в свою очередь обеспечивает повышение безопасности указанной работы МЗ ГЗУ. Вместе с тем, в результате реализации предлагаемого нового способа в МЗ ГЗУ с электропостоянными магнитами [28, 29] с использованием имеющихся в них обмоток-катушек управления - измерительных обмоток-катушек, выполняющих функции датчика - измерителя изменения рабочего магнитного потока намагничивания в магнитной цепи - в магнитопроводе МЗ ГЗУ, также будут иметь место выше указанные технические результаты, отличительные достоинства и преимущества.
Сущность заявляемого изобретения и его осуществление поясняются и проиллюстрированы фиг. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11,12, 13, 14, 15, 16 и 17.
На фиг. 1 и фиг. 2 показан общий вид в сечении технического решения МЭЗ ГЗУ [30] с монолитным Т-образным магнитопроводом сердечника соответственно с захваченным (фиг. 1) ферромагнитным грузом (наличие, удержание) в процессе-режиме работы МЭЗ ГЗУ «захват и удержание груза» и со сброшенным (фиг. 2) ферромагнитным грузом (отсутствие, отпускание) в процессе-режиме работы МЭЗ ГЗУ «сброс груза».
На фиг. 3 и фиг. 4 приведены для МЭЗ ГЗУ [30] графики, соответственно полученные расчетом (фиг. 3) и полученные на производственном образце измерением путем осциллографирования (фиг.4), зависимостей - переходных процессов по времени Т силы тока Iоi (Т) в обмотке-катушке управления при отсутствии (сбросе) ферромагнитного груза в МЭЗ ГЗУ (фиг. 2), силы тока Iнi (Т) в обмотке-катушке управления при наличии (захвате) ферромагнитного груза в МЭЗ ГЗУ (фиг. 1) и разностной функции Iоi (Т) - Iнi (Т) в i-ые моменты времени ТUi на интервале времени Т от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления МЭЗ ГЗУ напряжения от источника питания постоянного тока.
На фиг. 5 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [28] с захваченным ферромагнитным грузом (наличие, удержание) в процессе-режиме работы МЗ ГЗУ «захват и удержание груза».
На фиг. 6 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [28] при отсутствии - самопроизвольном сбросе (отпускании) ферромагнитного груза в процессе-режиме работы МЗ ГЗУ «захват и удержание груза».
На фиг. 7 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [28] со сброшенным ферромагнитным грузом (отсутствие, отпускание) в процессе-режиме работы МЗ ГЗУ «сброс груза».
На фиг. 8 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [28] при наличии (удержании) ферромагнитного груза в процессе-режиме работы МЗ ГЗУ «сброс груза».
На фиг. 9 приведены для МЗ ГЗУ [28] полученные расчетом графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) в измерительной обмотке-катушке при отсутствии (сбросе) ферромагнитного груза в МЗ ГЗУ (фиг. 6 и фиг. 7), силы тока Iнi (Т) в измерительной обмотке-катушке при наличии (захвате) ферромагнитного груза в МЗ ГЗУ (фиг. 5 и фиг. 8) и разностной функции Iоi (Т) - Iнi (Т) в i-ые моменты времени ТUi на интервале времени Т от момента (Т равно нулю) приложения к электрической цепи измерительной обмотки-катушки электроимпульсного МЗ ГЗУ напряжения от источника питания постоянного тока.
На фиг. 10 приведены для электроимпульсного МЗ ГЗУ [28] полученные расчетом графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) в обмотке-катушке управления намагничивания-перемагничивания при отсутствии (сбросе) ферромагнитного груза в МЗ ГЗУ (фиг. 6 и фиг. 7), силы тока Iнi (Т) в обмотке-катушке управления намагничивания-перемагничивания при наличии (захвате) ферромагнитного груза в МЗ ГЗУ (фиг. 5 и фиг. 8) и разностной функции Iоi (Т) - Iнi (Т) в i-ые моменты времени ТUi на интервале времени Т от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления намагничивания-перемагничивания электроимпульсного МЗ ГЗУ напряжения от источника питания постоянного тока.
На фиг. 11 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [22] с захваченным (наличие, удержание) ферромагнитным грузом в процессе-режиме работы МЗ ГЗУ «захват и удержание груза».
На фиг. 12 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [22] при отсутствии (отпускании) - самопроизвольном сбросе ферромагнитного груза в процессе-режиме работы МЗ ГЗУ «захват и удержание груза».
На фиг. 13 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [22] со сброшенным ферромагнитным грузом (отсутствие, отпускание) в процессе-режиме работы МЗ ГЗУ «сброс груза».
На фиг. 14 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [22] при наличи (удержании) ферромагнитного груза в процессе-режиме работы МЗ ГЗУ «сброс груза».
На фиг. 15 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [16] с захваченным (наличие, удержание) ферромагнитным грузом в процессе-режиме работы МЗ ГЗУ «захват и удержание груза».
На фиг. 16 показан общий вид в сечении технического решения электроимпульсного МЗ ГЗУ [16] со сброшенным ферромагнитным грузом (отсутствие, отпускание) в процессе-режиме работы МЗ ГЗУ «сброс груза».
На фиг. 17 приведены для электроимпульсных МЗ ГЗУ [16,22] полученные расчетом графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) в обмотке-катушке управления намагничивания-перемагничивания при отсутствии (сбросе) ферромагнитного груза в МЗ ГЗУ (фиг. 12, 13 и 16), силы тока Iнi (Т) в обмотке-катушке управления намагничивания-перемагничивания при наличии (захвате) ферромагнитного груза в МЗ ГЗУ (фиг. 11, 14 и 15), разностной функции Iоi (Т) - Iнi (Т) в i-ые моменты времени ТUi на интервале времени Т от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления намагничивания-перемагничивания электроимпульсного МЗ ГЗУ напряжения от источника питания постоянного тока.
На фиг. 1, 2, 5, 6, 7, 8, 11, 12, 13, 14, 15 и 16 приняты следующие общие обозначения:
1 - наружный полюс (магнитопроводящий);
2 - сердечник (магнитопроводящий); на фиг. 5, 6, 7 и 8 обозначены соответственно 2а - левый и 2б - правый сердечники (магнитопроводящие) МЗ ГЗУ [28];
3 - плоское ярмо (магнитопроводящее);
4 - неперемагничиваемый высококоэрцитивный постоянный магнит с направлением намагничивания S-N; на фиг. 5, 6, 7 и 8 обозначены соответственно 4а - левый, 4б - правый и 4в средний неперемагничиваемые постоянные магниты МЗ ГЗУ [28];
5 - обмотка-катушка управления;
6 - поперечный полюс (магнитопроводящий);
7 - ферромагнитный груз;
8 - магнитный поток неперемагничиваемых постоянных магнитов 4;
9 - магнитный поток обмотки-катушки управления в режиме работы датчика наличия/отсутствия ферромагнитного груза;
10 - Т-образный магнитопровод сердечника, образованный сердечником 2, плоским ярмом 3 и поперечным полюсом 6;
11 - перемагничиваемый постоянный магнит; на фиг. 5, 6, 7 и 8 обозначены соответственно 11а - левый и 11б - правый перемагничиваемые постоянные магниты МЗ ГЗУ [28];
12 - магнитный поток перемагничиваемого постоянного магнита;
13 - обмотка-катушка управления намагничивания-перемагничивания; на фиг. 5, 6, 7 и 8 обозначены соответственно 13а и 13б - обмотки-катушки управления перемагничивания левого 11а и правого 11б перемагничиваемых постоянных магнитов МЗ ГЗУ [28];
14 - обмотка-катушка измерительная изменения рабочего магнитного потока, связанного с ферромагнитным грузом 7; на фиг. 5, 6, 7 и 8 обозначены соответственно 14а и 14б - обмотки-катушки измерительные изменения рабочего магнитного потока от левых 4а и 11а, среднего 4в и правых 4б и 11б постоянных магнитов МЗ ГЗУ [28];
15 - П-образный магнитопровод наружного полюса;
16 - магнитный поток обмотки-катушки измерительной;
17 - обмотка регулирования домагничивания неперемагничиваемого постоянного магнита.
На фиг. 3, 4, 9, 10 и 17 приняты следующие общие обозначения:
Т, мс - время в течение переходного процесса в миллисекундах;
I, А - сила тока в Амперах;
Iоi (Т) - функция по времени Т нарастания силы тока в обмотке-катушке при отсутствии (сбросе) ферромагнитного груза в магнитном захвате ГЗУ в i-ые моменты времени ТUi ;
Iнi (Т) - функция по времени Т нарастания силы тока в обмотке-катушке при наличии (захвате) ферромагнитного груза в магнитном захвате ГЗУ в i-ые моменты времени ТUi;
Iоi (Т) - Iнi (Т) - разностная функция Iоi (Т) - Iнi (Т) - функция разности Iоi (Т) и Iнi (Т) в i-ые моменты времени ТUi;
Iоim - такое мгновенное значение силы тока в обмотке-катушке при отсутствии (сбросе) ферромагнитного груза в магнитном захвате ГЗУ в один i-ый момент времени ТUm от момента приложения к электрической цепи обмотки-катушки напряжения значением U, при котором разность между Iоim и Iнim будет максимальной;
Iнim - такое мгновенное значение силы тока в обмотке-катушке при наличии (захвате) ферромагнитного груза в магнитном захвате ГЗУ в один i-ый момент времени ТUm от момента приложения к электрической цепи обмотки-катушки напряжения значением U, при котором разность между Iоim и Iнim будет максимальной;
Iп - полусумма мгновенных значений сил тока Iоim и Iнim в обмотке-катушке магнитного захвата ГЗУ;
ТUm - i-ый момент времени ТUm от момента приложения к электрической цепи обмотки-катушки магнитного захвата ГЗУ напряжения значением U, при котором разность между Iоim и Iнim будет максимальной;
τн - постоянная времени электрической цепи обмотки-катушки магнитного захвата ГЗУ при наличии в нем ферромагнитного груза.
Осуществление изобретения
Осуществление заявляемого способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ ниже описывается для трех вариантов технического решения МЗ ГЗУ при захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе) ферромагнитного груза.
Для варианта 1 осуществление и последовательность реализация заявляемого способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ каждого и в совокупности технических действий согласно формуле изобретения, в том числе в них альтернативных, и их смысловое содержание применительно к МЭЗ ГЗУ [30], общий вид которого приведен на фиг. 1 и фиг. 2, заключается в следующем:
1.1 Получают расчетом (рассчитывают) значение индуктивности Lо электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ при отсутствии в нем ферромагнитного груза 7, когда магнитная цепь МЭЗ ГЗУ разомкнута как для магнитного потока 8 постоянного магнита 4, так и для магнитного потока 9 (фиг. 2), образуемого обмоткой-катушкой управления 5 при протекании в ней электрического тока, т.е. магнитный поток 9 не замыкается через ферромагнитный груз 7, например на основе формулы (4-44), указанной в [31 (с. 161)], а именно:
Lо= μоN2S/l, Гн
где μо - магнитная постоянная: µо=4π·10-7 Гн/м согласно ГОСТ 8.417-2002;
N - число витков обмотки-катушки;
S - площадь обмотки-катушки по ее среднему диаметру, м2;
l - осевая длина обмотки-катушки, м
Учитывая, что обмотка-катушка управления 5 МЭЗ ГЗУ выполняется как правило прямоугольного сечения (на каркасе), как это показано на фиг. 1 и фиг. 2, то предпочтительно рассчитывают значение ее индуктивности Lо по известной формуле (9-28), указанной в [34 (с. 368-369)], а именно:
 , Гн (1)
, Гн (1)
где D - средний диаметр обмотки-катушки, м;
r - радиальная толщина обмотки-катушки, м.
Расчет значений индуктивности Lо обмоток-катушек также может быть выполнен по известным эмпирическим формулам расчета индуктивностей Вилера (H. Wheeler), Г. Брукса (Н. Brooks) или Р. Уивера (R. Weaver) применительно к конкретным геометрическим размерам и их соотношениям в конструкции обмотки-катушки с учетом ее размещения в том или ином техническом решении МЭЗ или МЗ ГЗУ.
1.2 Получают расчетом (рассчитывают) значение индуктивности Lн электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ при захвате (наличии) МЭЗ ферромагнитного груза 7, когда магнитная цепь МЭЗ ГЗУ замкнута как для магнитного потока 8 постоянного магнита 4, так и для магнитного потока 9 (фиг. 1), образуемого обмоткой-катушкой управления 5 при протекании в ней электрического тока, т.е. магнитный поток 9 замыкается через ферромагнитный груз 7, например, по известной формуле (44), приведенной в [35 (с. 41)], учитывающей размещение обмотки-катушки 5 непосредственно на сердечнике МЭЗ ГЗУ (охватывающей часть магнитной цепи - сердечник 2 согласно фиг.1) и наличие малого по величине немагнитного зазора δ (см. фиг. 1 и фиг. 2) в магнитной цепи МЭЗ ГЗУ:
 , Гн (2)
, Гн (2)
где lс - средняя длина магнитной цепи - контура замыкания магнитного потока 9 МЭЗ ГЗУ, м, образуемого обмоткой-катушкой управления 5 при протекании в ней электрического тока, через (показано стрелками на фиг. 1) сердечник 2 Т-образного магнитопровода сердечника 10, поперечный полюс 6, немагнитный зазор δ, наружный полюс 1 и ферромагнитный груз 7;
μ = μа/μо - относительная магнитная проницаемость магнитной цепи магнитного захвата, [31 (с. 158), 33 (с. 61)], μа - абсолютное значение (среднее) магнитной проницаемости магнитомягкого материала магнитной цепи - магнитопровода МЭЗ, Гн/м;
Sм - площадь сечения части магнитной цепи - сердечника 2 в месте его охвата обмоткой-катушкой 5, м2;
δ, Sδ - соответственно немагнитный зазор, м, и его площадь, м2, между диаметральными наружной поверхностью поперечного полюса 6 и внутренней поверхностью наружного полюса 1 МЭЗ ГЗУ.
Формула (44) [35 (с. 41)] и соответственно выражение (2) основаны на известной формуле, приведенной в [32 (с. 242), 33 (с. 80)], а именно:
Lн = μоμSм N2/lс , Гн.
1.3 Получают расчетом (рассчитывают) значение электрического сопротивления постоянного тока R электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ по известной формуле, приведенной в [31 (с. 154)], а именно:
R= ρlср N/Sпр, Ом
где ρ - удельное электрическое сопротивление постоянному току материала проволоки провода обмотки-катушки, Ом⋅м;
lср - средняя длина витка провода обмотки-катушки, м;
Sпр - площадь сечения проволоки провода обмотки-катушки, м2.
Наиболее точные расчетные значения Lо, Lн и R получают методом конечно-элементного анализа при проведении численного компьютерного моделирования электромагнитных процессов в конкретной конструкции МЭЗ и МЗ ГЗУ с размещенной в них обмоткой-катушкой, например в программном комплексе «Ansys Maxwell» [ANSYS Maxwell 2014. Training Manual. Руководство пользователя] или в программном комплексе «Elcut» [Elcut v.5.9. Руководство пользователя. СПб: ООО «Тор», 2013].
1.4 Альтернативно, значения Lо и Lн получают измерением (измеряют), достаточно точно, например способом и устройством приведенным в [36,37], а значение R альтернативно получают измерением (измеряют) например способом приведенным в [38], или значения Lо, Lн и R получают измерением (измеряют) прямым методом любыми из соответствующих стандартизованных измерительных приборов, внесенных в «Государственный реестр средств измерений России» (https://www.rostest.ru/GosreestrSI.php; https://fgis.gost.ru/ fundmetrology/registry/4; дата обращения 13.06.2024 г.).
1.5 По полученным расчетом или измерением значениям R, Lн и Lо определяют расчетом (рассчитывают) постоянные времени τн и τо электрической цепи обмотки-катушки 5 МЭЗ ГЗУ соответственно при наличии (τн ) и при отсутствии (τо) в МЭЗ ферромагнитного груза 7 (фиг. 1 и фиг. 2) по известному отношению индуктивности обмотки-катушки L к её сопротивлению R: τ =L/R, т.е. τн =Lн/R и τо=Lо/R.
1.6 Получают расчетом (рассчитывают), понимая, что полученные значение τн больше значения τо согласно выражениям (1) и (2), значение такого i-го момента времени ТUm в пределах не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ напряжения значением U от источника питания постоянного тока, при котором разность мгновенных значений сил тока Iоim и Iнim в электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ, соответственно при отсутствии ферромагнитного груза 7 (фиг. 2) в МЭЗ ГЗУ (Iоim) и при (фиг. 1) его наличии (Iнim), будет максимальной (фиг. 3), следующим образом:
 . (3)
. (3)
При этом мгновенные значения сил тока Iоim и Iнim в момент времени ТUm (фиг. 3) получают расчетом (рассчитывают) следующим образом:
, (4)
. (5)
Выражения (3), (4) и (5) получены исходя из следующих соображений в следующей последовательности:
а) На основании решения дифференциального уравнения по закону Кирхгофа для «R-L» - электрической цепи (которая является электрическая цепь обмотки-катушки МЭЗ ГЗУ) при ее коммутации - приложении к ней напряжения значением U от источника питания постоянного тока, как суммы частного решения неоднородного уравнения и общего решения однородного уравнения согласно [33 (с. 324-326)], величина силы тока в указанной «R-L» электрической цепи с постоянной времени τ на интервале времени Т переходного процесса нарастания силы тока до его окончания описывается, как функция от Т, следующим уравнением:
 . (6)
. (6)
б) На основании уравнения (6), выражения для определения расчетом мгновенных значений сил тока Iоi и Iнi в i-ые моменты времени ТUi в электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ на интервале времени Т переходного процесса нарастания силы тока с учетом полученных значений R, τн, и τо будут следующими:
 , (7)
, (7)
 . (8)
. (8)
На фиг. 3 изображены графики зависимостей переходных процессов по времени Т силы тока Iоi (Т), при отсутствии ферромагнитного груза 7 (фиг. 2) в МЭЗ ГЗУ, и силы тока Iнi (Т), при наличии ферромагнитного груза 7 (фиг. 1) в МЭЗ ГЗУ, в обмотке-катушке управления 5 от момента (Т равно нулю) приложения к электрической цепи напряжения значением U от источника питания постоянного тока для одного из вариантов конструкции МЭЗ ГЗУ [30] (фиг. 1 и фиг. 2), рассчитанные по выражениям (7) и (8).
в) Поскольку мгновенные значения Iоi на интервале переходного процесса - времени Т больше мгновенных значений Iнi в любой i-ый момент времени ТUi в пределах Т, и считая, что значение τн всегда больше τо, то разностная функция из выражений (7) и (8) определится как:

 . (9)
. (9)
На фиг. 3 изображен график зависимости - переходный процесс по времени Т разностной функции Iоi (T) - Iнi (T) от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 5 напряжения значением U от источника питания постоянного тока для того же варианта конструкции МЭЗ ГЗУ (фиг. 1 и фиг. 2), расcчитанной по выражению (9).
г) Производная по переменной (аргументу) ТUi указанной в перечислении в) разностной функции (9), для определения ее экстремума, будет следующей:
 . (10)
. (10)
Приравнивая к нулю выражение функции (10) и решая его относительно ТUi, получим выражение (3) для ТUm, которое является корнем выражения (10) и соответственно экстремумом разностной функции (9), что проиллюстрировано расчетным значением ТUm, находящимся в пределах значения τн, на фиг. 3.
д) Вторая производная разностной функции (9) при подстановке в нее ТUm по выражению (3) вместо ТUi, будет следующей:
 . (11)
. (11)
Устанавливая условие, что правая часть функции согласно выражения (11) меньше нуля, получаем неравенство, решением которого будет τн больше τо. Это означает, что разностная функция по выражению (9) имеет максимальное значение в точке экстремума при значении ТUm, т.е. разность мгновенных значений сил тока Iоim и Iнim в i-ый момент времени ТUm будет максимальной, и тогда выражения (7) и (8) для расчетного определения Iоim и Iнim в i-ый момент времени ТUm принимают вид выражений (4) и (5), что проиллюстрировано штриховыми линиями для расчетных значенияй Iоim и Iнim в момент времени ТUm на фиг. 3.
1.7 Вычисленные значения ТUm по выражению (3) и мгновенные значения сил тока Iоim и Iнim по выражениям (4) и (5) могут в определенной степени отличаться от их фактических (валидационных) значений в тех или иных конструкциях МЭЗ ГЗУ в зависимости от их параметров (фактических свойств материалов, проводов и комплектующих изделий, геометрических размеров, в том числе с учетом внешних влияющих факторов, например, температуры окружающей среды) и поэтому является целесообразным альтернативное получение измерением (измерение) указанных значения ТUm и мгновенных значений сил тока Iоim и Iнim в этот момент времени ТUm.
1.8 Альтернативно, получают измерением (измеряют), в конкретном техническом и проектом решении конструкции МЭЗ ГЗУ, значение i-ого момента времени ТUm и мгновенных значений сил тока Iоim и Iнim в обмотке-катушке управления 5 МЭЗ ГЗУ в этот момент времени ТUm, при котором их разность (Iоim и Iнim) достигает максимального значения, для чего:
- подключают к источнику питания постоянного тока электрическую цепь обмотки-катушки управления 5 и прикладывают к ней напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой управления 5 магнитного потока 9 с направлением рабочего магнитного потока 8 от постоянного магнита 4 в магнитной цепи МЭЗ ГЗУ при захвате им ферромагнитного груза 7, как это показано на фиг.1 (указанная магнитная цепь МЭЗ ГЗУ образована, согласно фиг. 1 и фиг. 2, сердечником 2, плоским ярмом 3 и поперечным полюсом 6 Т-образного магнитопровода сердечника 10 и наружным полюсом 1, а также ферромагнитным грузом 7 при его захвате МЭЗ ГЗУ);
- измеряют последовательно в i-ые моменты времени ТUi, в пределах интервала времени не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 5 напряжения значением U, мгновенные значения сил тока в электрической цепи обмотки-катушки управления 5 Iоi и Iнi по мере их нарастания в ней соответственно при отсутствии (фиг. 2) ферромагнитного груза 7 в МЭЗ ГЗУ (Iоi) и при (фиг. 1) его наличии (Iнi), например осциллографированием аналогично [37] с применением осциллографа цифрового запоминающего типа TDS2012C или подобных ему из внесенных в «Государственный реестр средств измерений России» https://www.rostest.ru/GosreestrSI.php; https://fgis.gost.ru/fundmetrology/registry/4; дата обращения 13.05.2024 г.), или, например, аналогично [38, 39, 40] с использованием датчика (измерителя) мгновенных значений силы тока в электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ, аналого-цифрового преобразователя мгновенных значений силы тока в код (преимущественно в двоичный) от указанного датчика тока и блока управления ГЗУ с процессором, контроллером или микро-ЭВМ, осуществляющих обработку, хранение (запоминание) и отображение результатов по получаемым от аналого-цифрового преобразователя данных;
- определяют из полученных измеренных значений сил тока Iоi и Iнi при соответствующих им i-ых моментах времени ТUi такое значение силы тока Iоim и такое значение силы тока Iнim и соответствующий им один i-ый момент времени ТUm от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки 5 от источника питания постоянного тока напряжения значением U, при которых разность Iоim и Iнim будет максимальной.
На фиг. 4 изображены практически полученные графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) и силы тока Iнi (Т) в обмотке-катушке управления 5 от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления напряжения значением U от источника питания постоянного тока, полученные (измеренные) осциллографированием с применением осциллографа цифрового запоминающего типа TDS2012C, в производственном образце варианта конструкции МЭЗ ГЗУ [30] что и по перечислению 1.6 б). При этом при значении ТUm (точка экстремума) разность полученных измерением мгновенных значений сил тока Iоim и Iнim максимальная, что следует из приведенного на фиг. 4 графика разностной функции Iоi (T) - Iнi (T) и проиллюстрировано штриховыми линиями в момент времени ТUm.
1.9 Вычисляют из полученных расчетом (перечисление 1.6) или измерением (перечисление 1.8) значений сил тока Iоim и Iнim их полусумму Iп.
1.10 Далее в процессе удержания МЭЗ ГЗУ ферромагнитного груза 7 и (или) его отпускания (фиг. 1 и фиг. 2) прикладывают к электрической цепи обмотки-катушки управления 5 МЭЗ ГЗУ от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой 5 магнитного потока 9 с направлением рабочего магнитного потока 8, образованного постоянным магнитом 4 в магнитной цепи МЭЗ ГЗУ при захвате им ферромагнитного груза 7, на время длительностью не менее удвоенного значения ТUm от момента (Т равно нулю) приложения от источника питания постоянного тока к электрической цепи обмотки-катушки управления 5 напряжения значением U, измеряют в момент времени ТUm значение силы тока Iи, протекающего в электрической цепи обмотки-катушки управления 5, сравнивают полученное значение Iи со значением Iп (перечисление 1.9) и судят о наличии ферромагнитного груза 7 в МЭЗ ГЗУ если полученное значение Iи меньше Iп или судят об отсутствии ферромагнитного груза 7 в МЭЗ ГЗУ если полученное значение Iи больше Iп.
1.11 Таким образом, полученные расчетом и измерением, согласно перечислений 1.1-1.10, указанные в формуле изобретения и в настоящем описании значения и свойства Lо, Lн, R, τн, τо, ТUm, Iоim, Iнim и Iп для технического и проектного решения конструкции МЭЗ ГЗУ [30], приведенного в общем виде на фиг. 1 и фиг. 2, практически одинаковы, что проиллюстрировано данными, приведенными на фиг. 3 и фиг. 4. Это подтверждает достоверность и реализуемость (возможности осуществления) заявляемого изобретения.
Для варианта 2 осуществление и последовательность реализация заявляемого способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ каждого и в совокупности технических действий согласно формуле изобретения, в том числе в них альтернативных, и их смысловое содержание применительно к электроимпульсному МЗ ГЗУ [28], общий вид которого приведен на фиг. 5, фиг. 6, фиг. 7 и фиг. 8, заключается в следующем:
2.1 Получают расчетом (рассчитывают) согласно перечислению 1.1 значение индуктивности Lо электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ, которые идентичны по параметрам и используются раздельно по прямому назначению [28], при отсутствии в нем ферромагнитного груза 7, когда магнитная цепь МЗ ГЗУ (фиг. 6 и фиг. 7) разомкнута как для магнитного потока 8 неперемагничиваемых постоянных магнитов 4а, 4б и 4в, магнитного потока 12 перемагничиваемых постоянных магнитов 11а и 11бв, так и для магнитного потока 16, образуемого обмоткой-катушкой измерительной 14а и (или) 14б при протекании в ней электрического тока, т.е. магнитный поток 16 не проходит по магнитной цепи МЗ ГЗУ и не замыкается через ферромагнитный груз 7.
2.2 Получают расчетом (рассчитывают) согласно перечислению 1.2 значение индуктивности Lн электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ, которые идентичны и используются раздельно по прямому назначению [28], при наличии-захвате МЗ ферромагнитного груза 7, когда магнитная цепь МЗ ГЗУ (фиг. 5 и фиг. 8) замкнута как для магнитного потока 8 неперемагничиваемых постоянных магнитов 4а, 4б и 4в (через сердечники 2а и 2б, ферромагнитный груз 7, наружный полюс 1 и плоское ярмо 3, образующие П-образный магнитопровод наружного полюса 15, частично через перемагничиваемые постоянные магниты 11а и 11б), магнитного потока 12 перемагничиваемых постоянных магнитов 11а и 11б (через плоское ярмо 3 и наружный полюс 1, сердечники 2а и 2б, ферромагнитный груз 7), так и для магнитного потока 16 (через сердечники 2а и 2б, ферромагнитный груз 7, перемагничиваемые постоянные магниты 11а и 11б, плоское ярмо 3) образуемого обмоткой-катушкой измерительной 14а и (или) 14б при протекании в ней электрического тока, т.е. магнитный поток 16 проходит по магнитной цепи МЗ ГЗУ и замыкается через ферромагнитный груз 7.
2.3 Получают расчетом (рассчитывают) значение электрического сопротивления постоянного тока R электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ согласно перечислению 1.3.
2.4 Альтернативно, значения Lо, Lн и R электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ получают измерением (измеряют) достаточно точно, согласно перечислению 1.4.
2.5 По полученным расчетом или измерением значениям R, Lн и Lо определяют расчетом (рассчитывают) согласно перечислению 1.5 постоянные времени τн и τо электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ соответственно при наличии (τн ) и при отсутствии (τо) в МЗ ферромагнитного груза 7 (фиг. 5 и фиг. 7).
2.6 Получают расчетом (рассчитывают) согласно перечисления 1.6 значение такого i-го момента времени ТUm в пределах не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ напряжения значением U от источника питания постоянного тока, при котором разность мгновенных значений сил тока Iоim и Iнim в этой электрической цепи соответственно при отсутствии ферромагнитного груза 7 (фиг. 6) в МЗ ГЗУ (Iоim) и при (фиг. 5) его наличии (Iнim) будет максимальной (фиг. 9).
На фиг. 9 изображен график зависимости - переходный процесс по времени Т разностной функции Iоi (T) - Iнi (T) от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки измерительной 14а или 14б МЗ ГЗУ напряжения значением U от источника питания постоянного тока для МЗ ГЗУ (фиг. 5 и фиг. 7), расчитанной по выражению (9).
На фиг. 9 также изображены расчетные графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) и силы тока Iнi (Т) в обмотке-катушке измерительной 14а или 14б МЗ ГЗУ [28] от момента (Т равно нулю) приложения к ее электрической цепи напряжения значением U от источника питания постоянного тока. При этом при значении ТUm (точка экстремума) разность полученных измерением мгновенных значений сил тока Iоim и Iнim максимальная, что следует из приведенного на фиг. 9 графика разностной функции Iоi (T) - Iнi (T) и проиллюстрировано штриховыми линиями в момент времени ТUm.
2.7 Вычисленные для МЗ ГЗУ согласно перечисления 2.6 значения ТUm по выражению (3) и мгновенные значения сил тока Iоim и Iнim по выражениям (4) и (5) могут в определенной степени отличаться от их фактических (валидационных) значений в исполнениях конструкций МЗ ГЗУ в зависимости от их параметров (фактических свойств материалов, проводов и комплектующих изделий, геометрических размеров, в том числе с учетом внешних влияющих факторов, например, температуры окружающей среды) и поэтому является целесообразным в МЗ ГЗУ альтернативное получение измерением (измерение) указанных значения ТUm и мгновенных значений сил тока Iоim и Iнim в электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ в этот момент времени ТUm.
2.8 Альтернативно, согласно перечисления 1.8, получают измерением (измеряют), в конкретном техническом и проектом решении конструкции МЗ ГЗУ, значение i-ого момента времени ТUm и мгновенных значений сил тока Iоim и Iнim в обмотке-катушке измерительной 14а и (или) 14б МЗ ГЗУ в этот момент времени ТUm, при котором их разность (Iоim и Iнim) достигает максимального значения, для чего:
- подключают к источнику питания постоянного тока электрическую цепь обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ и прикладывают к ней напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой измерительной 14а и (или) 14б магнитного потока 16 с направлением рабочего магнитного потока в МЗ ГЗУ, образованного магнитным потоком 8 от неперемагничиваемых постоянных магнитов 4а, 4б и 4в и магнитным потоком 12 от перемагничиваемых постоянных магнитов 11а и 11б в магнитной цепи МЗ ГЗУ при захвате им ферромагнитного груза 7, как это показано на фиг. 5;
- измеряют последовательно в i-ые моменты времени ТUi, в пределах интервала времени не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ напряжения значением U мгновенные значения сил тока в них Iоi и Iнi по мере их нарастания в ней соответственно при отсутствии (фиг. 7) ферромагнитного груза 7 в МЗ ГЗУ (Iоi) и при (фиг. 5) его наличии (Iнi);
- определяют из полученных измеренных значений сил тока Iоi и Iнi при соответствующих им i-ых моментах времени ТUi такое значение силы тока Iоim и такое значение силы тока Iнim и соответствующий им один i-ый момент времени ТUm от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки измерительной 14а и (или) 14б от источника питания постоянного тока напряжения значением U, при которых разность Iоim и Iнim будет максимальной.
2.9 Вычисляют из полученных расчетом (перечисление 2.6) или измерением (перечисление 2.8) значений сил тока Iоim и Iнim их полусумму Iп.
2.10 Далее в процессе удержания МЗ ГЗУ ферромагнитного груза 7 и (или) после его отпускания (фиг. 5 и фиг. 7) прикладывают к электрической цепи обмотки-катушки измерительной 14а и (или) 14б МЗ ГЗУ от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой измерительной 14а и (или) 14б магнитного потока 16 с направлением рабочего магнитного потока 8 от неперемагничиваемых постоянных магнитов 4а, 4б и 4в и магнитным потоком 12 от перемагничиваемых постоянных магнитов 11а и 11б в магнитной цепи МЗ ГЗУ при захвате им ферромагнитного груза 7, как это показано на фиг. 5, на время длительностью не менее удвоенного значения ТUm от момента (Т равно нулю) приложения от источника питания постоянного тока к электрической цепи обмотки-катушки измерительной 14а и (или) 14б напряжения значением U, измеряют в момент времени ТUm значение силы тока Iи, протекающего в электрической цепи обмотки-катушки измерительной 14а и (или) 14б, сравнивают полученное значение Iи со значением Iп (перечисление 2.9) и судят о наличии ферромагнитного груза 7 в МЗ ГЗУ если полученное значение Iи меньше Iп или судят об отсутствии ферромагнитного груза 7 в МЗ ГЗУ если полученное значение Iи больше Iп.
2.11 На фиг. 6, в качестве иллюстрации возможностей реализации и осуществления заявляемого изобретения для электроимпульсного МЗ ГЗУ [28], изображены пути замыкания в магнитной цепи МЗ ГЗУ магнитных потоков 8, 12 и 16 в ситуации отсутствия - самопроизвольного сброса (отпускания) ферромагнитного груза 7 в процессе-режиме работы МЗ ГЗУ «захват и удержание груза», при которой магнитный поток 16 не замыкается как в магнитной цепи МЗ ГЗУ, так и через ферромагнитный груз 7, что определяет значение силы тока Iи близким к значению Iоim в обмотке-катушке измерительной 14а или 14б МЗ ГЗУ и большим значения Iп и соответственно Iнim (см. фиг. 9), что в свою очередь однозначно указывает на отсутствие в МЗ ГЗУ ферромагнитного груза 7, т.е. не выполнение его захвата и удержания.
2.12 На фиг. 8, в качестве иллюстрации возможностей реализации и осуществления заявляемого изобретения для электроимпульсного МЗ ГЗУ [28], изображены пути замыкания в магнитной цепи МЗ ГЗУ магнитных потоков 8, 12 и 16 в ситуации наличии (удержании) ферромагнитного груза 7 в процессе-режиме работы МЗ ГЗУ «сброс груза», при которой магнитный поток 16 замыкается как в магнитной цепи МЗ ГЗУ, так и через ферромагнитный груз 7, что определяет значение силы тока Iи близким к значению Iнim в обмотке-катушке измерительной 14а или 14б МЗ ГЗУ и меньшим значения Iп и соответственно Iоim (см. фиг. 9), что в свою очередь однозначно указывает на наличие в МЗ ГЗУ ферромагнитного груза 7, т.е. не выполнение его сброса.
2.13 На фиг. 10, в качестве иллюстрации возможностей реализации и осуществления заявляемого изобретения для электроимпульсного МЗ ГЗУ [28] в варианте использования его обмотки-катушки управления намагничивания-перемагничивания, при выполнении действий применительно к электроимпульсному МЗ ГЗУ [28] согласно перечислениям 1.1-1.10, приведены расчетные графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) в обмотке-катушке управления намагничивания-перемагничивания 13а или 13б (при их одинаковых параметрах) при отсутствии (сбросе) ферромагнитного груза 7 в МЗ ГЗУ (фиг. 6 и фиг. 7), силы тока Iнi (Т) в обмотке-катушке управления намагничивания-перемагничивания 13а или 13б (при их одинаковых параметрах) при наличии (захвате) ферромагнитного груза 7 в МЗ ГЗУ (фиг. 5 и фиг. 8) и разностной функции Iоi (T) - Iнi (T) в i-ые моменты времени ТUi на интервале времени Т от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления намагничивания-перемагничивания электроимпульсного МЗ ГЗУ [28] напряжения от источника питания постоянного тока, из которых следует, что при использовании обмотки-катушки управления намагничивания-перемагничивания 13а или 13б по значениям в ней Iоim и Iнim,, а также по разностной функции Iоi (Т) - Iнi (Т), является возможным определение наличия/отсутствия ферромагнитного груза 7 в электроимпульсном МЗ ГЗУ [28]. Однако максимальное значение амплитуды разностной функции Iоi (Т) - Iнi (Т) в варианте использования обмотки-катушки управления намагничивания-перемагничивания электроимпульсного МЗ ГЗУ [28] существенно меньше, чем максимальное значение амплитуды разностной функции Iоi (Т) - Iнi (Т) в варианте использования в нем обмотки-катушки измерительной.
Для варианта 3 осуществление и последовательность реализация заявляемого способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ каждого и в совокупности технических действий согласно формуле изобретения, в том числе в них альтернативных, и их смысловое содержание применительно к электроимпульсным МЗ ГЗУ [16,22], общий вид которых для МЗ ГЗУ [16] приведен на фиг. 15 и фиг. 16, а для МЗ ГЗУ [22] приведен на фиг. 11, фиг. 12, фиг. 13 и фиг. 14, заключается в следующем:
3.1 Получают расчетом (рассчитывают) согласно перечислению 1.1 значение индуктивности Lо электрической цепи обмотки-катушки управления 13 МЗ ГЗУ при отсутствии в нем ферромагнитного груза 7, когда магнитная цепь МЗ ГЗУ (фиг. 12, фиг. 13 и фиг. 16) разомкнута как для магнитного потока 8 неперемагничиваемого постоянного магнита 4, магнитного потока 12 перемагничиваемого постоянного магнита 11, так и для магнитного потока 9, образуемого обмоткой-катушкой управления 13 при протекании в ней электрического тока, т.е. магнитный поток 9 не проходит по магнитной цепи МЗ ГЗУ и не замыкается через ферромагнитный груз 7.
3.2 Получают расчетом (рассчитывают) согласно перечислению 1.2 значение индуктивности Lн электрической цепи обмотки-катушки управления 13 МЗ ГЗУ при наличии-захвате МЗ ферромагнитного груза 7, когда магнитная цепь МЗ ГЗУ (фиг. 11, фиг. 14 и фиг. 15) замкнута как для магнитного потока 8 неперемагничиваемого постоянного магнита 4 и магнитного потока 12 перемагничиваемого постоянного магнита 11 (через наружный полюс 1 и ферромагнитный груз 7 для МЗ ГЗУ [22], и через наружный полюс 1, ферромагнитный груз 7 и плоское ярмо 3 для МЗ ГЗУ [16]), так и для магнитного потока 9 обмотки-катушки управления 13 в режиме работы датчика наличия/отсутствия ферромагнитного груза 7 (через наружный полюс 1 и ферромагнитный груз 7) образуемого обмоткой-катушкой управления 13 при протекании в ней электрического тока, т.е. магнитный поток 9 проходит по магнитной цепи МЗ ГЗУ и замыкается через ферромагнитный груз 7.
3.3 Получают расчетом (рассчитывают) значение электрического сопротивления постоянного тока R электрической цепи обмотки-катушки управления 13 МЗ ГЗУ согласно перечислению 1.3.
3.4 Альтернативно, значения Lо, Lн и R электрической цепи обмотки-катушки управления 13 МЗ ГЗУ получают измерением (измеряют) достаточно точно, согласно перечислению 1.4.
3.5 По полученным расчетом или измерением значениям R, Lн и Lо определяют расчетом (рассчитывают) согласно перечислению 1.5 постоянные времени τн и τо электрической цепи обмотки-катушки управления 13 МЗ ГЗУ соответственно при наличии (τн) и при отсутствии (τо) в МЗ ферромагнитного груза 7 (фиг. 11, фиг. 14 и фиг. 15, и фиг. 12, фиг. 13 и фиг. 16).
3.6 Получают расчетом (рассчитывают) согласно перечисления 1.6 значение такого i-го момента времени ТUm в пределах не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 13 МЗ ГЗУ напряжения значением U от источника питания постоянного тока, при котором разность мгновенных значений сил тока Iоim и Iнim в этой электрической цепи соответственно при отсутствии ферромагнитного груза 7 (фиг. 12, фиг. 13 и фиг. 16) в МЗ ГЗУ (Iоim) и при (фиг. 11, фиг. 14 и фиг. 15) его наличии (Iнim) будет максимальной (фиг. 17).
На фиг. 17 изображен график зависимости - переходный процесс по времени Т разностной функции Iоi (T) - Iнi (T) от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 13 МЗ ГЗУ напряжения значением U от источника питания постоянного тока для МЗ ГЗУ (фиг. 13, фиг. 16 и фиг. 11, фиг. 15), расчитанной по выражению (9).
На фиг. 17 также изображены расчетные графики зависимостей - переходных процессов по времени Т силы тока Iоi (Т) и силы тока Iнi (Т) в обмотке-катушке управления 13 для МЗ ГЗУ [16, 22] от момента (Т равно нулю) приложения к ее электрической цепи напряжения значением U от источника питания постоянного тока. При этом при значении ТUm (точка экстремума) разность полученных измерением мгновенных значений сил тока Iоim и Iнim максимальная, что следует из приведенного на фиг. 17 графика разностной функции Iоi (T) - Iнi (T) и проиллюстрировано штриховыми линиями в момент времени ТUm.
3.7 Вычисленные для МЗ ГЗУ согласно перечисления 3.6 значения ТUm по выражению (3) и мгновенные значения сил тока Iоim и Iнim по выражениям (4) и (5) могут в определенной степени отличаться от их фактических (валидационных) значений в исполнениях конструкций МЗ ГЗУ в зависимости от их параметров (фактических свойств материалов, проводов и комплектующих изделий, геометрических размеров, в том числе с учетом внешних влияющих факторов, например, температуры окружающей среды) и поэтому является целесообразным в МЗ ГЗУ альтернативное получение измерением (измерение) указанных значения ТUm и мгновенных значений сил тока Iоim и Iнim в электрической цепи обмотки-катушки управления 13 МЗ ГЗУ в этот момент времени ТUm.
3.8 Альтернативно, согласно перечисления 1.8, получают измерением (измеряют), в конкретном техническом и проектом решении конструкции МЗ ГЗУ, значение i-ого момента времени ТUm и мгновенных значений сил тока Iоim и Iнim в обмотке-катушке управления 13 МЗ ГЗУ в этот момент времени ТUm, при котором их разность (Iоim и Iнim) достигает максимального значения, для чего:
- подключают к источнику питания постоянного тока электрическую цепь обмотки-катушки управления 13 МЗ ГЗУ и прикладывают к ней напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой управления 13 магнитного потока 9 с направлением рабочего магнитного потока в МЗ ГЗУ, образованного магнитным потоком 8 от неперемагничиваемого постоянного магнита 4 и магнитным потоком 12 от перемагничиваемого постоянного магнита 11 в магнитной цепи МЗ ГЗУ при захвате им ферромагнитного груза 7, как это показано на фиг. 11 и фиг. 15;
- измеряют последовательно в i-ые моменты времени ТUi, в пределах интервала времени не менее τн от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 13 МЗ ГЗУ напряжения значением U мгновенные значения сил тока в них Iоi и Iнi по мере их нарастания в ней соответственно при отсутствии (фиг. 13 и фиг. 16) ферромагнитного груза 7 в МЗ ГЗУ (Iоi) и при (фиг. 11 и фиг. 15) его наличии (Iнi);
- определяют из полученных измеренных значений сил тока Iоi и Iнi при соответствующих им i-ых моментах времени ТUi такое значение силы тока Iоim и такое значение силы тока Iнim и соответствующий им один i-ый момент времени ТUm от момента (Т равно нулю) приложения к электрической цепи обмотки-катушки управления 13 от источника питания постоянного тока напряжения значением U, при которых разность Iоim и Iнim будет максимальной.
3.9 Вычисляют из полученных расчетом (перечисление 3.6) или измерением (перечисление 3.8) значений сил тока Iоim и Iнim их полусумму Iп.
3.10 Далее в процессе удержания МЗ ГЗУ ферромагнитного груза 7 и (или) после его отпускания (фиг. 11, фиг. 15 и фиг. 13 и фиг. 15) прикладывают к электрической цепи обмотки-катушки управления 13 МЗ ГЗУ от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой управления 13 магнитного потока 9 с направлением рабочего магнитного потока 8 от неперемагничиваемого постоянного магнита 4 и магнитным потоком 12 от перемагничиваемого постоянного магнита 11 в магнитной цепи МЗ ГЗУ при захвате им ферромагнитного груза 7, как это показано на фиг. 11 и фиг. 15, на время длительностью не менее удвоенного значения ТUm от момента (Т равно нулю) приложения от источника питания постоянного тока к электрической цепи обмотки-катушки управления 13 напряжения значением U, измеряют в момент времени ТUm значение силы тока Iи, протекающего в электрической цепи обмотки-катушки управления 13, сравнивают полученное значение Iи со значением Iп (перечисление 3.9) и судят о наличии ферромагнитного груза 7 в МЗ ГЗУ если полученное значение Iи меньше Iп или судят об отсутствии ферромагнитного груза 7 в МЗ ГЗУ если полученное значение Iи больше Iп.
3.11 На фиг. 12, в качестве иллюстрации возможностей реализации и осуществления заявляемого изобретения для электроимпульсного МЗ ГЗУ [22], изображены пути замыкания в магнитной цепи МЗ ГЗУ магнитных потоков 8, 9 и 12 в ситуации отсутствия (отпускания) - самопроизвольного сброса ферромагнитного груза 7 в процессе-режиме работы МЗ ГЗУ «захват и удержание груза», при которой магнитный поток 9 не замыкается как в магнитной цепи МЗ ГЗУ, так и через ферромагнитный груз 7, что определяет значение силы тока Iи близким к значению Iоim в обмотке-катушке управления 13 МЗ ГЗУ и большим значения Iп и соответственно Iнim (см. фиг. 17), что в свою очередь однозначно указывает на отсутствие в МЗ ГЗУ ферромагнитного груза 7, т.е. не выполнение его захвата и удержания.
3.12 На фиг. 14, в качестве иллюстрации возможностей реализации и осуществления заявляемого изобретения для электроимпульсного МЗ ГЗУ [22], изображены пути замыкания в магнитной цепи МЗ ГЗУ магнитных потоков 8, 9 и 12 в ситуации наличии (удержании) ферромагнитного груза 7 в процессе-режиме работы МЗ ГЗУ «сброс груза», при которой магнитный поток 9 замыкается как в магнитной цепи МЗ ГЗУ, так и через ферромагнитный груз 7, что определяет значение силы тока Iи близким к значению Iнim в обмотке-катушке управления 13 МЗ ГЗУ и меньшим значения Iп и соответственно Iоim (см. фиг. 17), что в свою очередь однозначно указывает на наличие в МЗ ГЗУ ферромагнитного груза 7, т.е. не выполнение его сброса.
Таким образом, обеспечено в полной мере осуществление (реализация) заявляемого изобретения и достижение заявленных результатов каждого и в совокупности (последовательности) из приведенных в формуле изобретения описанных технических действий, при этом описанное определение наличия/отсутствия ферромагнитного груза в МЗ ГЗУ может осуществляться неограниченное число раз в процессе работы (эксплуатации) МЗ ГЗУ при захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе) груза.
Следует отметить, что наибольшая эффективность предлагаемого способа бездатчикового определения наличия/отсутствия груза в МЗ ГЗУ достигается при размещении обмотки-катушки управления на наружной поверхности (вокруг) магнитомягкого сердечника ненасыщенной магнитной цепи МЗ ГЗУ (фиг. 1, фиг.2, фиг. 5, фиг.6, фиг.7, фиг. 8), которая замыкается (размыкается) ферромагнитным грузом, что проиллюстрировано на фиг. 3, фиг. 4 и фиг. 9. Этим обеспечивается (достигается) максимальное значение разностной функци Iоi (Т) - Iнi (Т). Вместе с тем, достаточная эффективность предлагаемого способа бездатчикового определения наличия/отсутствия груза в МЗ ГЗУ обеспечивается и при аналогичном размещении обмотки-катушки управления на наружной поверхности (вокруг) перемагничиваемого постоянного магнита в ненасыщенной магнитной цепи МЗ ГЗУ (фиг. 11, фиг. 12, фиг. 13, фиг. 14, фиг. 15, фиг. 16), которая замыкается (размыкается) ферромагнитным грузом, что проиллюстрировано на фиг. 17 - максимальным значением разностной функции Iоi (Т) - Iнi (Т).
Таким образом, вышеизложенная реализуемость заявленного изобретения обеспечена и подтверждена приведенными расчетными данными и результатами испытаний производственных образцов МЗ ГЗУ для трех вариантов осуществления технических решений МЗ ГЗУ, что обеспечивает достижение заявленных технических результатов, а именно:
- создание впервые нового способа бездатчикового определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ, в т.ч. расширяющего арсенал средств этого назначения (предназначения) - определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ в процессе и при захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе) ферромагнитного груза;
- расширение функциональных возможностей известных технических решений ГЗУ с МЗ различного типа без применения (использования) самостоятельных или автономных датчиков, что упрощает определение наличия/отсутствия ферромагнитного груза в МЗ в процессе работы ГЗУ и, соответственно, упрощает конструкции ГЗУ;
- повышение достоверности и точности определения наличия/отсутствия ферромагнитного груза в МЗ ГЗУ и тем самым повышает безопасности в процессе и при захвате (подъеме), длительном удержании при транспортировании (переносе) и отпускании (сбросе) ферромагнитного груза МЗ ГЗУ;
- повышение надежности и существенного снижения влияния (зависимости от качества и свойств) окружающей среды на процесс определения наличия/отсутствия ферромагнитного груза.
Термины и определения понятий в заявляемом изобретении приведены в соответствии с ГОСТ 18311-80, ГОСТ Р 58885-2020, ГОСТ 21559-76, ГОСТ Р 52956-2008, ГОСТ 19693-74, ГОСТ Р 52002-2003, ГОСТ 10160-75, ГОСТ 11036-75, ГОСТ IEC 60027-1-2015, ГОСТ 21427.1...4-83, ГОСТ 3836-83, ГОСТ 8.377-80, ГОСТ Р 54521-2011.
Источники информации:
1 Козырев Ю.Г. Захватные устройства и инструменты промышленных роботов: Учебное пособие // М.: КНОРУС, 2010. - 312 с.
2 Челпанов И.Б., Колпашников С.Н. Схваты промышленных роботов // Л.: Машиностроение. Ленингр. отд-ние, 1989. - 287 с.
3 Системы очувствления и адаптивные промышленные роботы / В.Б. Брагин, Ю.Г.Войлов, Ю.Д. Жаботинский и др.; Под общ. ред. Е.П. Попова, В.В. Кисилева // М.: Машиностроение, 1985. - 256 с.
4 Козырев Ю.Г. Промышленные роботы: Справочник.: Учебное пособие // М.: Машиностроение, 1988. - 392 с.
5 Воротников С.А. Информационные устройства робототехнических систем: Учебное пособие // М.: Изд-во МГТУ им. Н.Э.Баумана, 2005. - 384 с.
6 Лукинов А.П. Проектирование мехатронных и робототехнических устройств: Учебное пособие // СПб.: Издательство «Лань», 2012. - 608 с.
7. Патент RU 168336.
8. Патент RU 2717873.
9. Патент RU 2752622.
10. Патент RU 2702964.
11. Патент RU 2622069.
12. Авторское свидетельство SU 1269995.
13. Деревенко К.А. Грузозахватные постоянные магниты с электроимпульсным управлением // М.: Информэлектро, 1983. - 60 с.
14. Константинов О.Я. Расчет и конструирование магнитных и электромагнитных приспособлений // Л.: Машиностроение, 1967. - 316 с.
15. Константинов О.Я. Магнитная технологическая оснастка // Л.: Машиностроение, 1974. - 383 с.
16. Авторское свидетельство SU № 735547
17. Патент US 397844.
18. Авторское свидетельство SU № 1096186.
19. Авторское свидетельство SU № 1585271.
20. Авторское свидетельство SU № 1636317.
21. Авторское свидетельство SU № 1253932.
22. Авторское свидетельство SU № 1068366.
23. Авторское свидетельство СССР № 707882.
24. Авторское свидетельство SU № 918237.
25. Авторское свидетельство SU № 1082744.
26. Авторское свидетельство SU № 1778059.
27. Патент JP 04345498.
28. Патент US 6104270.
29. Патент US 4237455.
30. Патент RU 2797934.
31. Справочник по радиоэлектронике / А.Ф. Богданов, В.В. Васин, В.Н. Дулин и др.; Под общ. ред. А.А. Куликовского. Том 1 // М.: Энергия, 1967. - 648 с.
32. Нейман Л.Р., Калантаров П.Л. Теоретические основы электротехники. Часть 1, издание пятое // М.-Л.: Госэнергоиздат, 1959. - 296 с.
33. Бессонов Л.А. Теоретические основы электротехники // М.: «Высшая школа», 1973. - 752 с.
34. Калантаров П.Л., Цейтлин Л.А. Расчет индуктивностей: Справочная книга // Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. - 488 с.
35. Федотов А.В. Расчет и проектирование индуктивных измерительных устройств // М.: «Машиностроение», 1979. - 176 с.
36. Авторское свидетельство СССР № 243716.
37. Патент RU 2193210.
38. Патент RU 2696365.
39. Патент RU 2759886.
40. Патент RU 2705939.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Способ управления грузовым электромагнитом в режиме освобождения от ферромагнитного груза | 1987 |
|
SU1585230A1 |
| Магнитный захват | 1982 |
|
SU1068366A1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| Устройство для передачи материала из зоны в зону с разными давлениями | 1983 |
|
SU1131797A1 |
| Грузоподъемное магнитное устройство | 1978 |
|
SU735547A1 |
| Устройство для управления грузоподъемным постоянным магнитом | 1982 |
|
SU1302418A1 |
| Магнитный захват | 1988 |
|
SU1636317A2 |
| Магнитный захват | 1988 |
|
SU1585271A2 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
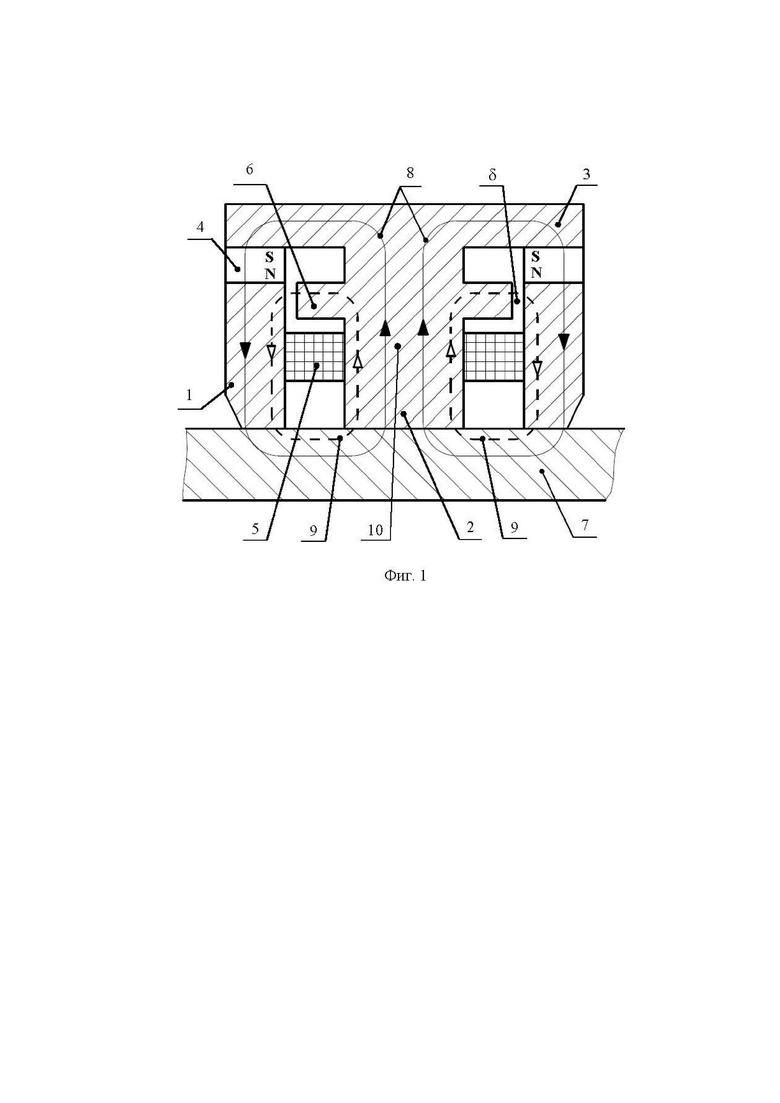
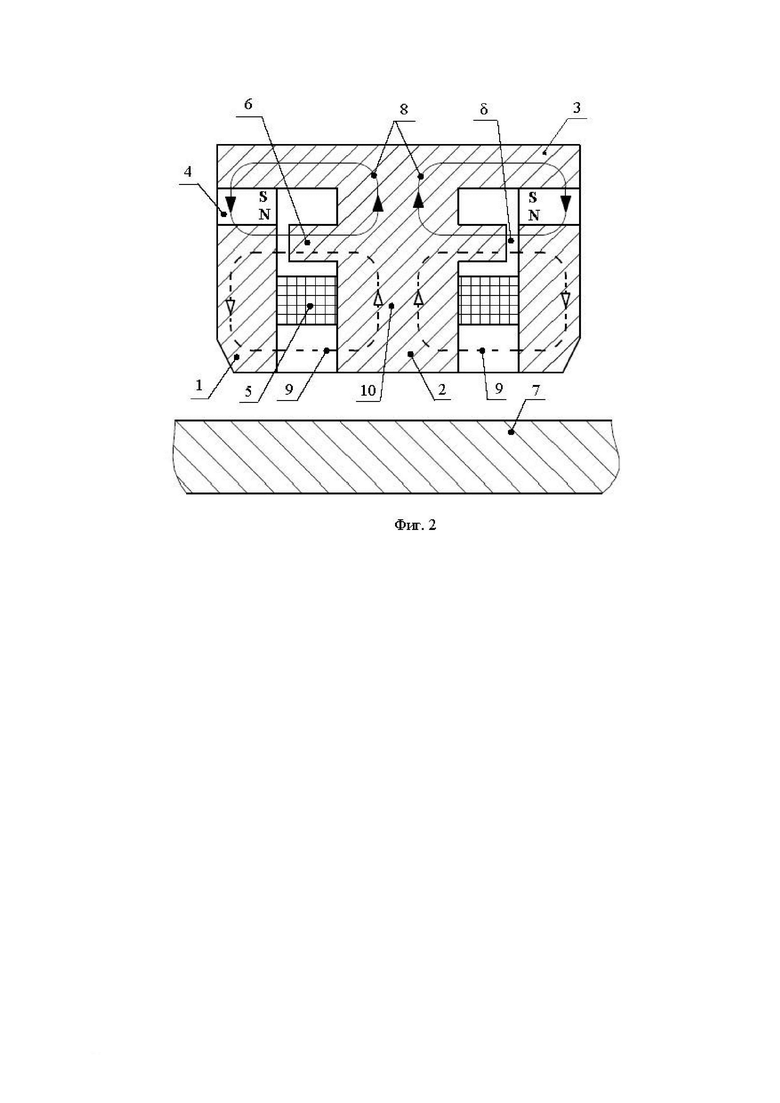
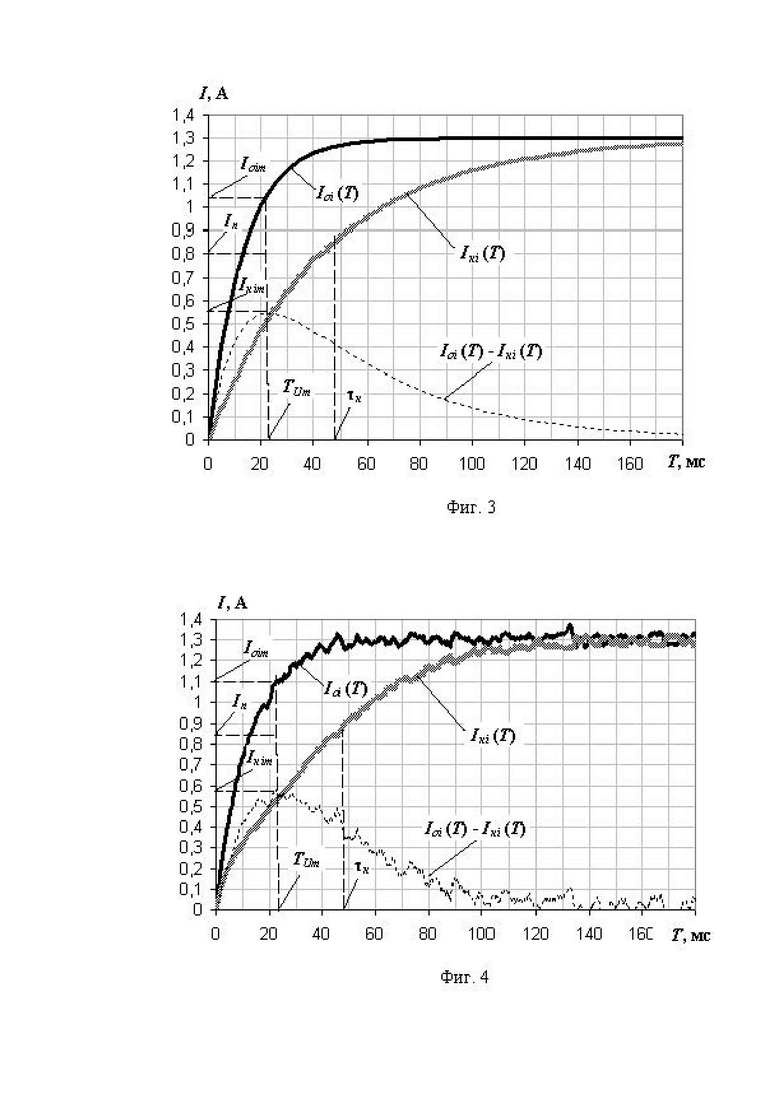
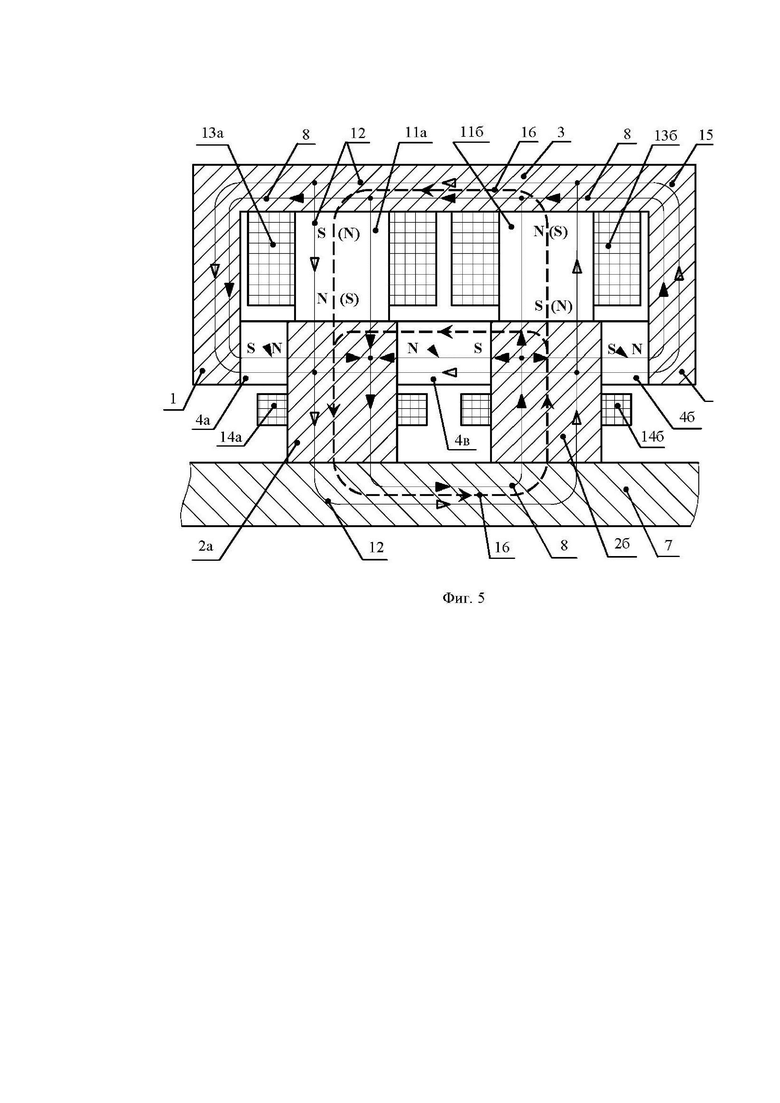
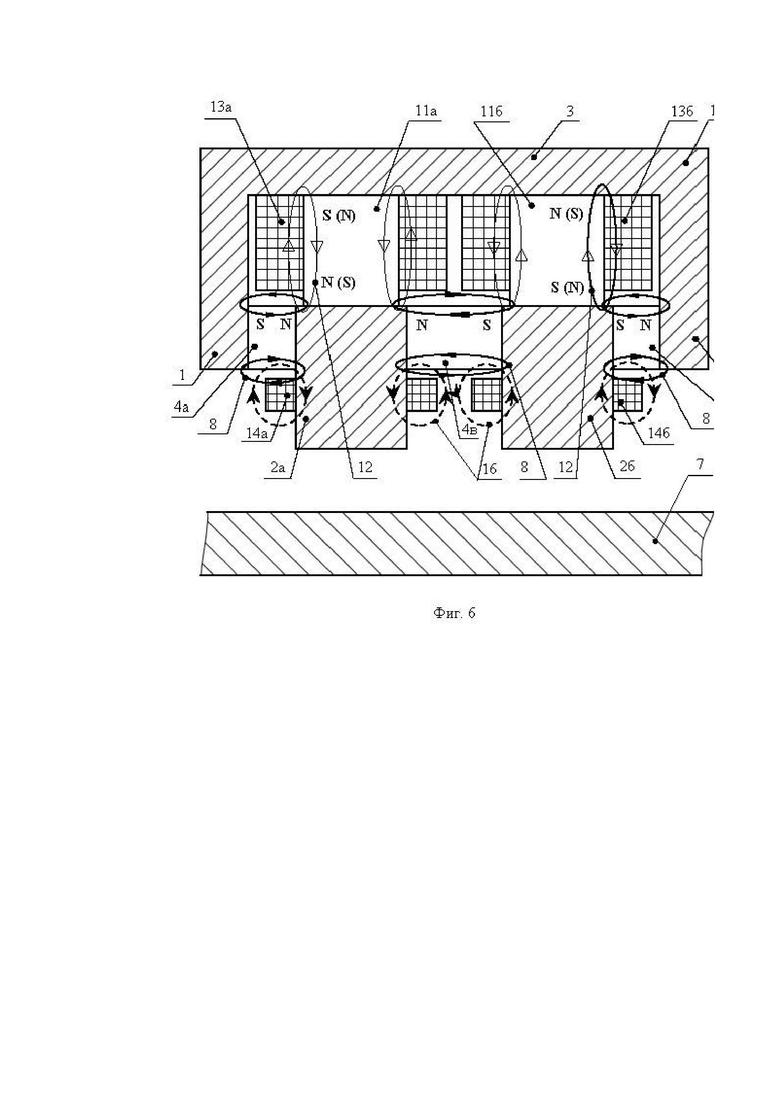
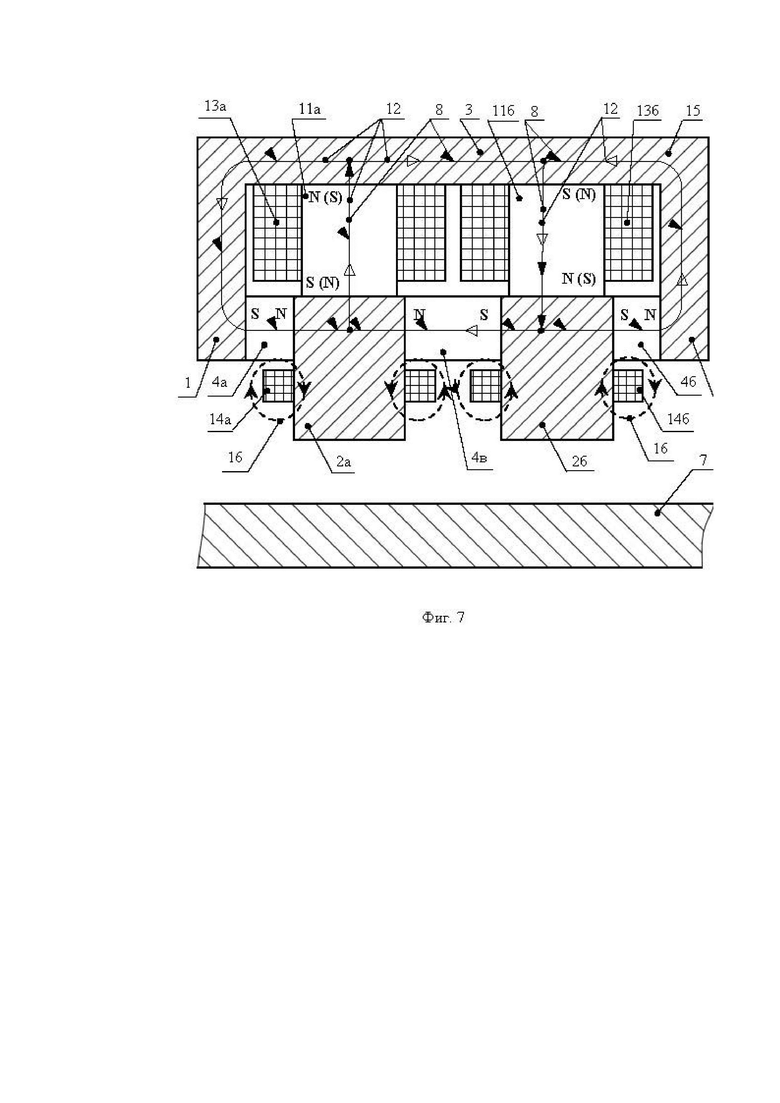
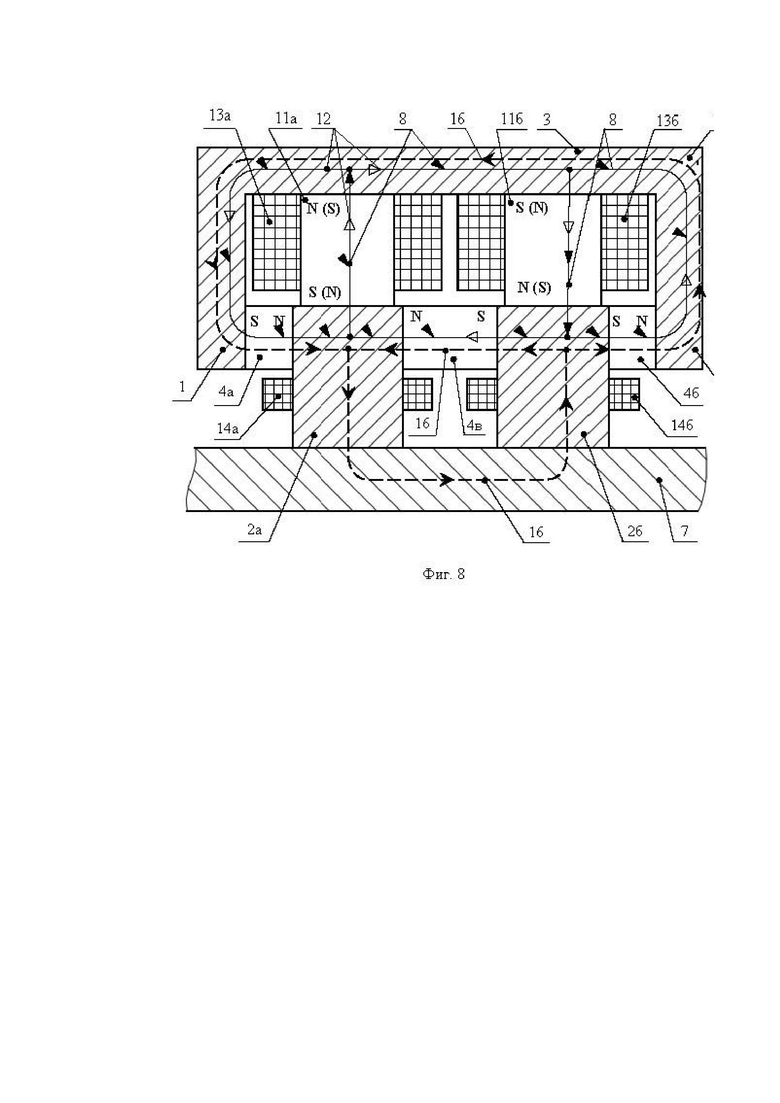
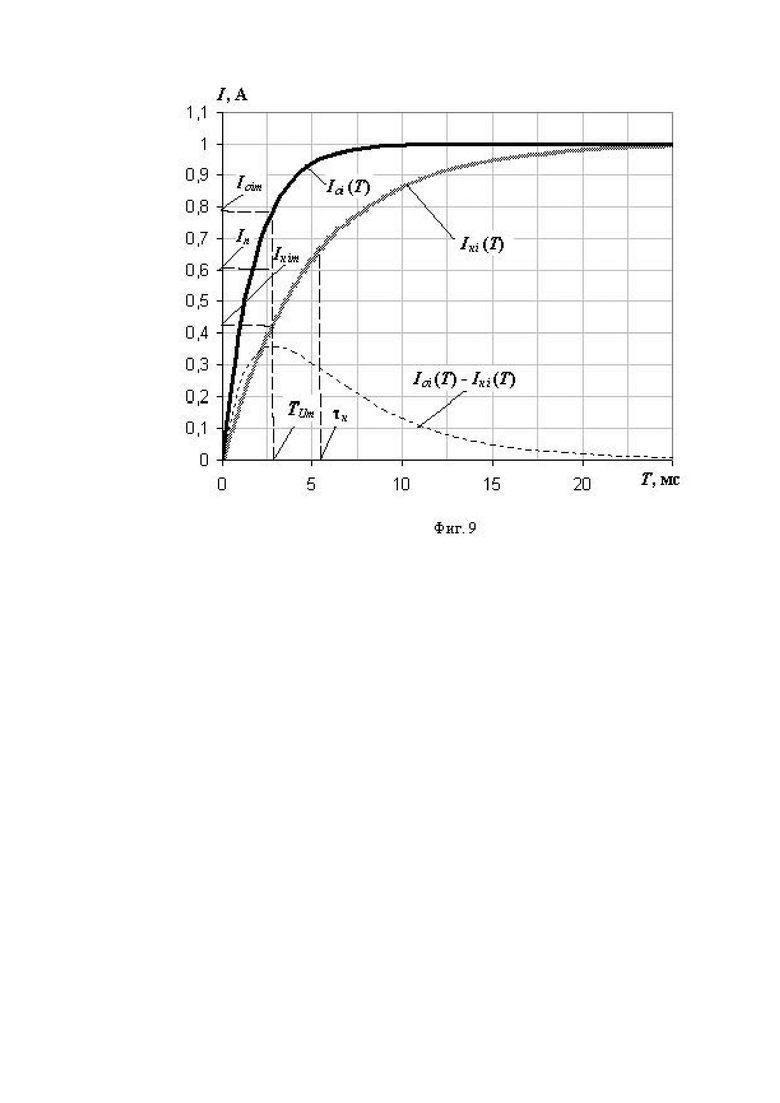
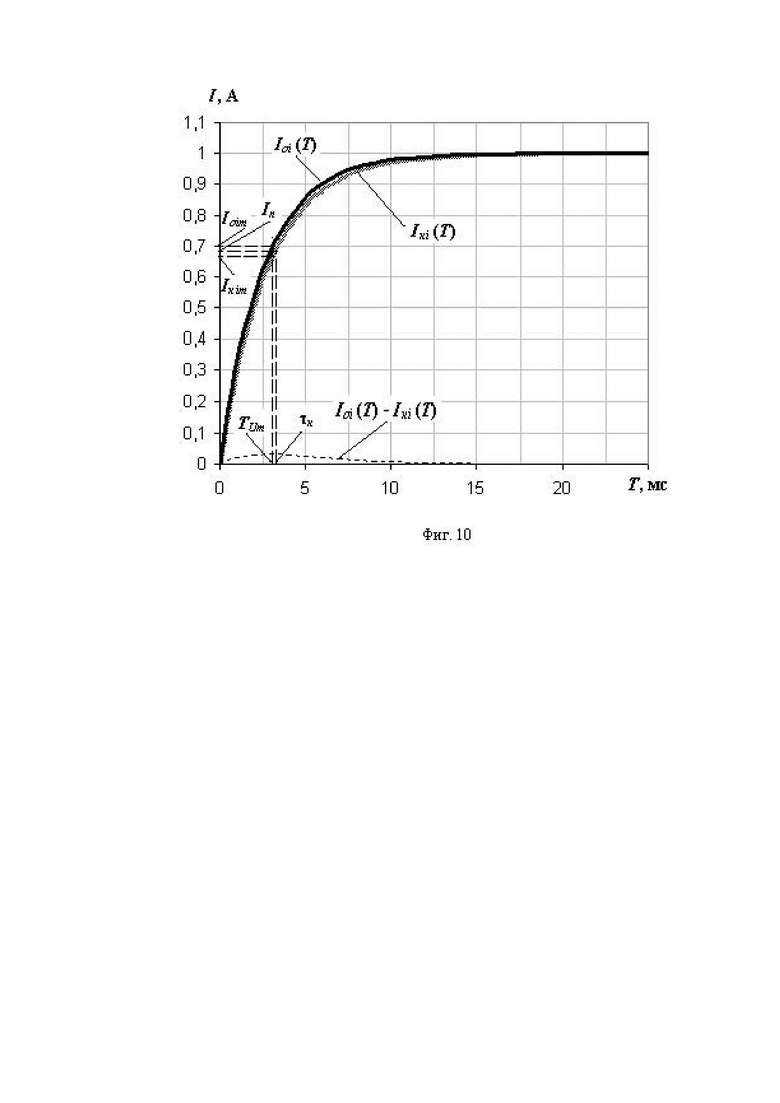
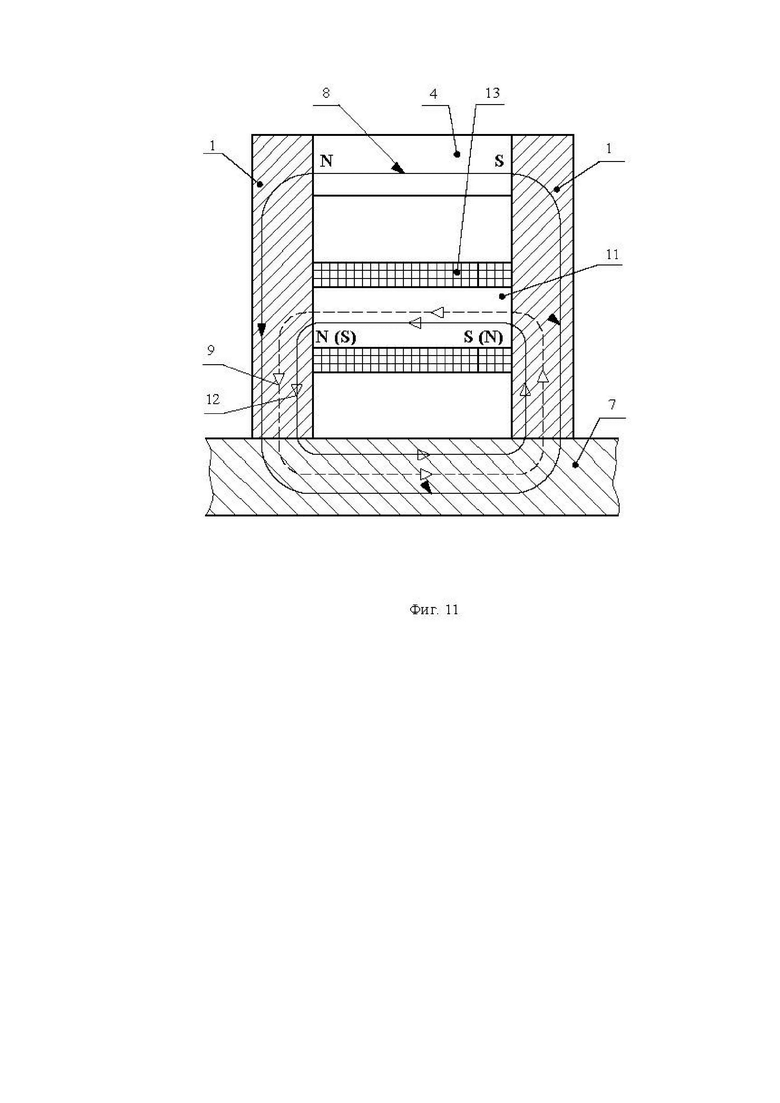
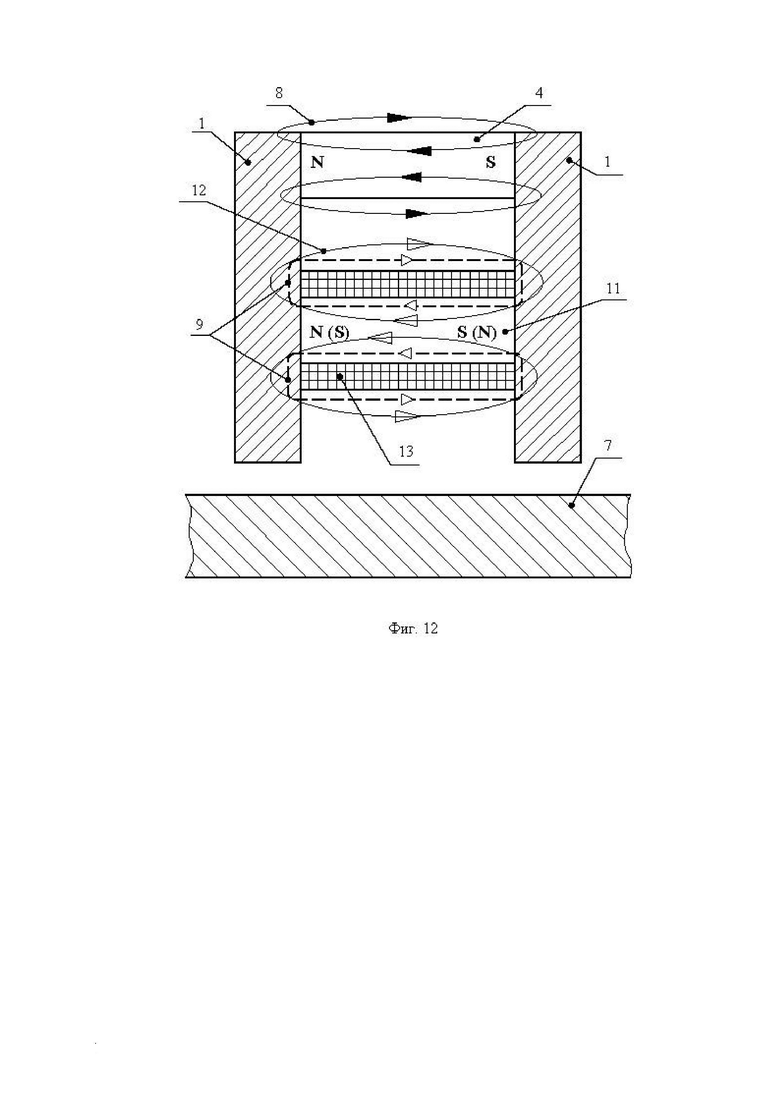
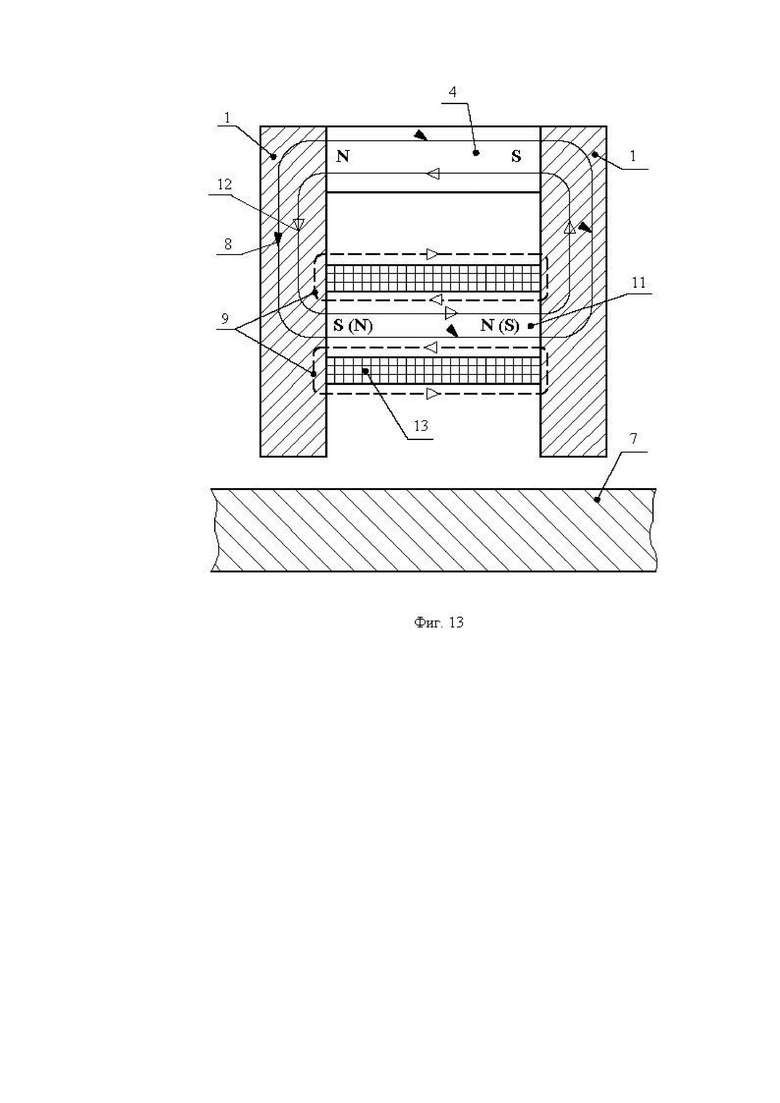
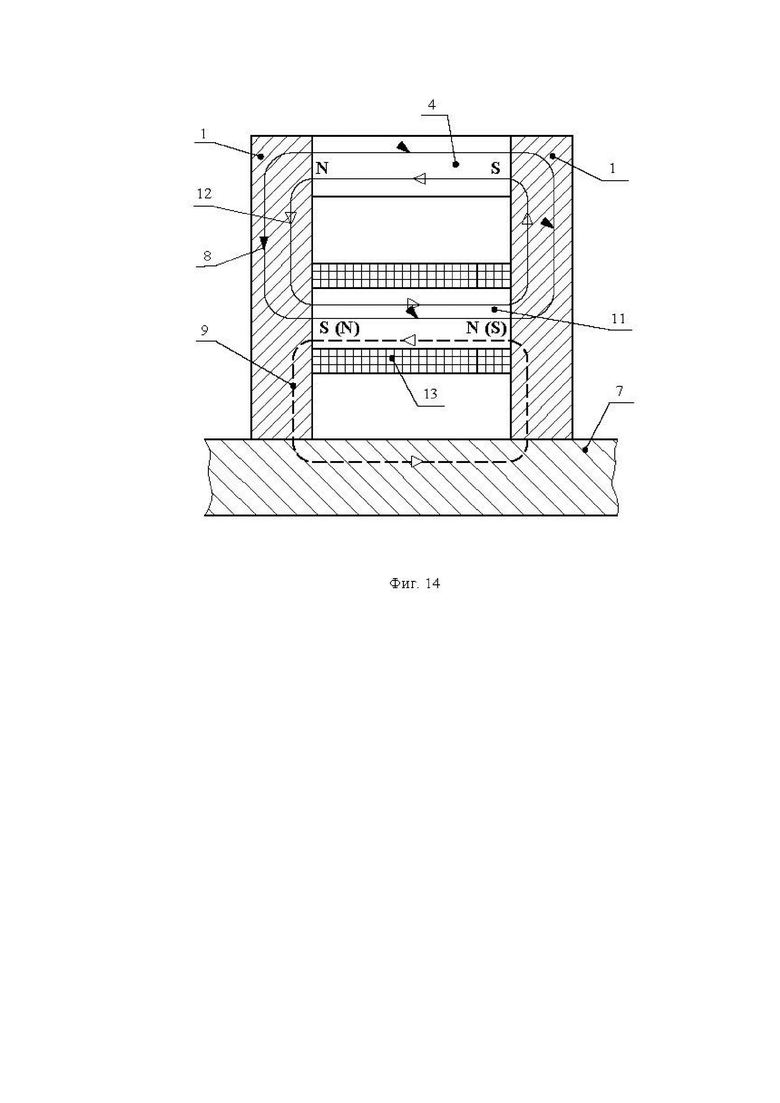
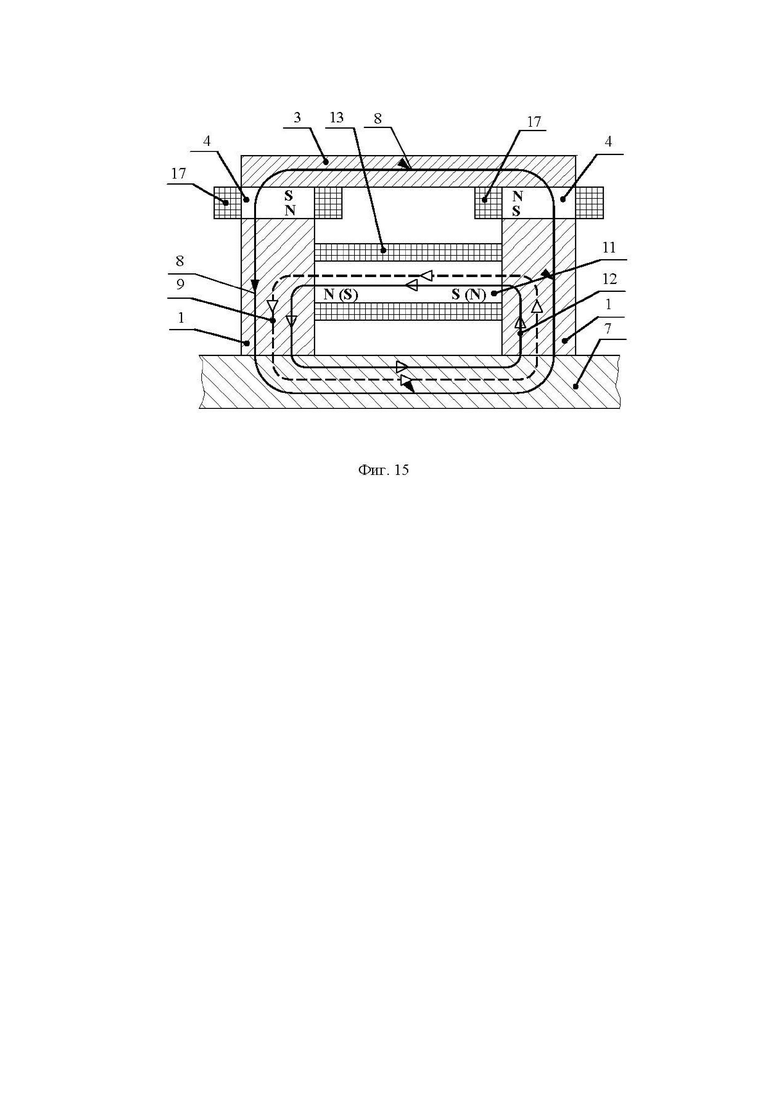
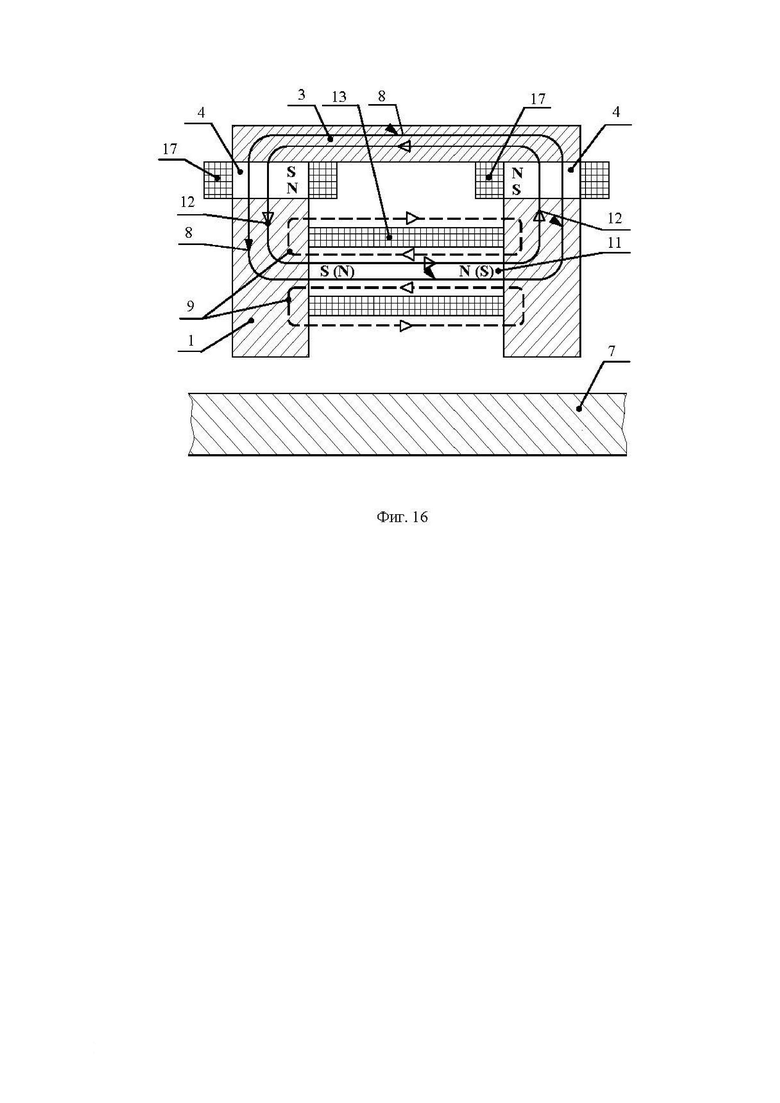
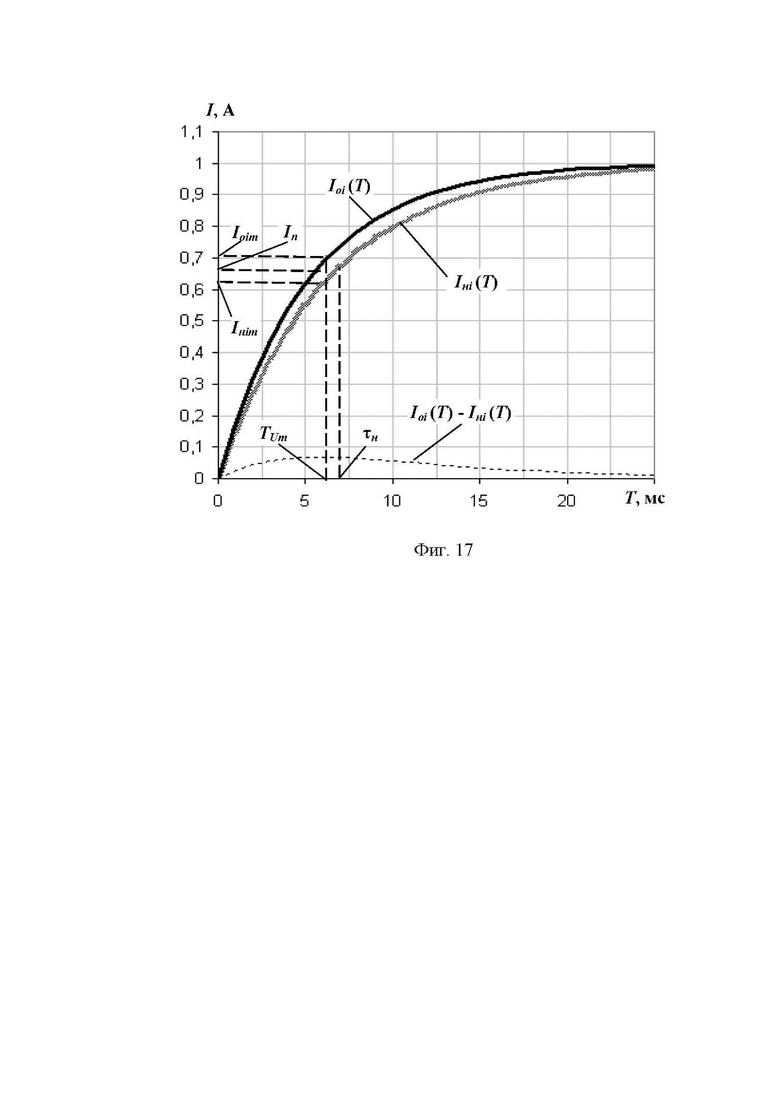
Изобретение относится к магнитным грузозахватным и грузоподъемным устройствам с постоянным магнитом (магнитами) и обмоткой-катушкой управления для робототехнических устройств и обеспечивает определение наличия/отсутствия в магнитном захвате ферромагнитного груза без использования самостоятельных датчиков. Способ заключается в том, что получают измерением сопротивление постоянному току обмотки-катушки и ее индуктивностей при отсутствии и при наличии в магнитном захвате груза, а по их значениям соответственно рассчитывают постоянные времени обмотки-катушки, затем получают измерением при переходном процессе значение такого момента времени и мгновенные значения сил тока при нем в обмотке-катушке при отсутствии груза и при его наличии в магнитном захвате от момента приложения к обмотке-катушке напряжения постоянного тока, при котором разность этих сил тока достигает максимального значения, вычисляют их полусумму, далее в процессе захвата и удержания магнитным захватом груза, при и после его отпускания, прикладывают к обмотке-катушке напряжение постоянного тока и измеряют в полученный момент времени текущее мгновенное значение силы тока, протекающего в обмотке-катушке, сравнивают его с вычисленной полусуммой и судят о наличии груза в магнитном захвате, если текущее измеренное значение силы тока меньше вычисленной полусуммы, или о его отсутствии, если оно больше. Техническим результатом при реализации заявленного решения является расширение арсенала средств, в том числе альтернативных, такого назначения, обеспечивает расширение функциональных возможностей магнитных захватов, упрощение их конструкции, повышение надежности, точности и безопасности работы. 17 ил.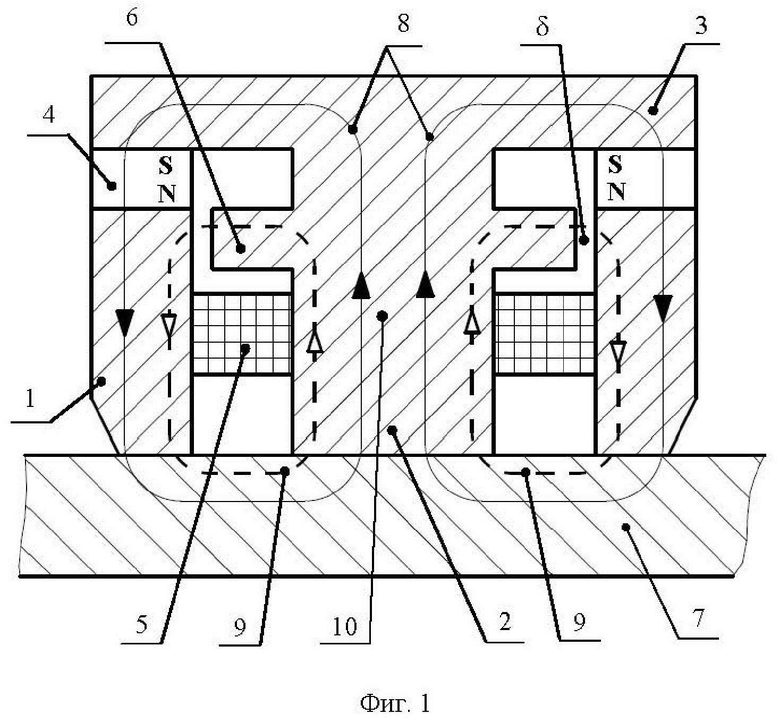
Способ определения наличия или отсутствия ферромагнитного груза в магнитном захвате грузозахватного устройства с постоянными магнитами, заключающийся в том, что измеряют значения индуктивностей электрической цепи обмотки-катушки управления магнитного захвата Lo и Ln, охватывающей соосно часть магнитной цепи магнитного захвата и своей плоскостью перпендикулярно направлению рабочего магнитного потока в ней, соответственно при отсутствии (Lo) и при наличии (Ln) в магнитном захвате груза измеряют значение сопротивления постоянному току электрической цепи обмотки - катушки управления R, определяют к полученным значениям Lo, Ln и R постоянные времени τo и τn электрической цепи обмотки-катушки соответственно при отсутствии (τo) и при наличии (τn) в магнитном захвате груза, определяют значение такого i-ого момента времени TUm в пределах интервала времени, равного τn, от момента приложения к электрической цепи обмотки-катушки управления напряжения значением U от источника питания постоянного тока и мгновенные значения сил тока в ней в этот момент времени TUm при отсутствии груза в магнитном захвате Ioim и при его наличии Inim, используя полученные значения R, τo и τn, при котором разность мгновенных значений сил тока Ioim и Inim достигает максимального значения, следующим образом;

определяют значение i-ого момента времени TUm и мгновенные значения сил тока Ioim и Inim в этот момент времени TUm, при котором их разность достигает максимального значения, для чего подключают к источнику питания постоянного тока электрическую цепь обмотки-катушки управления магнитного захвата, прикладывают к ней напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой магнитного потока с направлением рабочего магнитного потока в магнитной цепи магнитного захвата при захвате им груза, и измеряют последовательно в i-ые моменты времени TUi в пределах интервала времени не менее τn от момента приложения к ней напряжения значением U мгновенные значения сил тока в электрической цепи обмотки-катушки управления Ioi и Ini по мере их нарастания в ней соответственно при отсутствии груза в магнитном захвате (Ioi) и при его наличии (Ini), определяют из полученных измеренных значений сил тока Ioi и Ini при соответствующих им i-ых моментах времени TUi такое значение силы тока Ioim и такое значение силы тока Inim и соответствующий им один i-ый момент времени TUm от момента приложения к электрической цепи обмотки-катушки напряжения значением U, при которых разность Inim и Inim будет максимальной, затем определяют силу тока Ioim и Inim и их полусумму In, далее в процессе захвата и удержания груза, при и после его отпускания прикладывают к электрической цепи обмотки-катушки управления магнитного захвата от источника питания постоянного тока напряжение значением U с полярностью, обеспечивающей согласное направление образуемого при этом обмоткой-катушкой магнитного потока с направлением рабочего магнитного потока в магнитной цепи магнитного захвата при захвате им груза, на время длительностью не менее удвоенного значения TUm от момента его приложения, измеряют в момент времени TUm значение силы тока Iu, протекающего в электрической цепи обмотки-катушки управления, сравнивают полученное значение Iu со значением In и судят о наличии груза в магнитном захвате, если полученное значение Iu меньше In, или о его отсутствии, если полученное значение Iu больше In.
| KR 20020035935 A, 16.05.2002 | |||
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| US 6104270 A1, 15.08.2000 | |||
| US 5038128 A1, 06.08.1991. | |||

