Изобретение относится к строитель- ой технике, предназначено преимущест-25 енно для уплотнения грунта в стесенных условиях строительства и явля- втся усовершенствованием вибротрамовки по авТоСВ, № 1 87501о
Целью изобретения является повы- ЗО |пение эффективности уплотнения грун- hra, снижение энергоемкости процесса за счет стабилизации величины силы предварительного прижатия инерцион- I ной массы к нижнему поясу рамы,, На фиГо и 2 схематически изобра- |жена вйбротрамбовка в положениях, ха- 1рактеризующих основные возможные ре- 1 жимы ее работы в зависимости от положения рабочей плиты относительно 0 оси подвески рамы к стреле базовой
машиныв
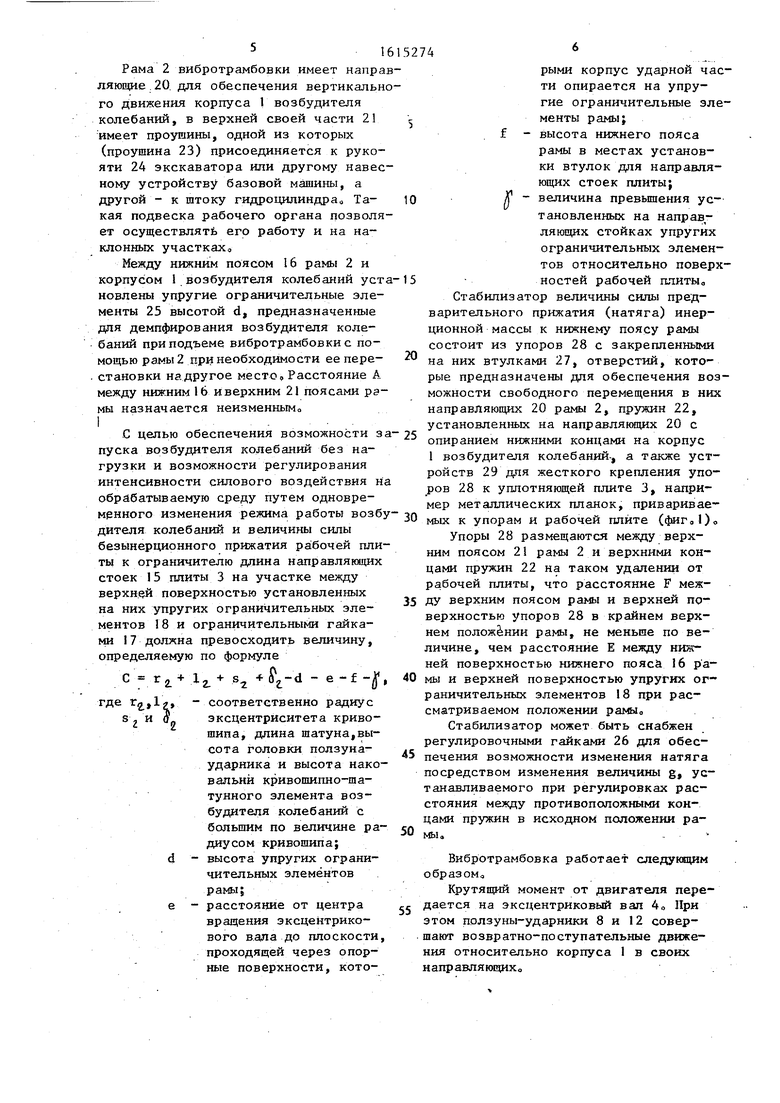
Вибротрамбовка включает (фиго) кривошипно-щатунный возбудитель 1 колебаний, размещенный в инер1цюнной дз массе (корпусе), раму 2 и рабочую плиту Зо
Кривошипно-гаатунньй возбудитель 1 колебаний содержит эксцентриковый о
.(коленчатый) вал 4 с маховиком 5, выполненный с разновеликими кривошипами 6 и 7, сдвинутыми по фазе на угол СР . Кривошип 6 с эксцентриситетом г. через шатун 8 длиной 1, сое- 55 динен с ползуном-ударником 9 с высотой головки S,, взаимодействующим с установленной на плит наковальней 10, имекидей высо;ту О, . Кривошип 7 с
эксцентриситетом г через шатун 11 длиной 12 соединен с ползуном-ударником 12 с высотой головки Sj взаимо- действукмцим с наковальней 13, имеющей высоту (f о Ударник 9 охватывает ударник 12.и является направляющей для последнегоо Сам ползун-ударник 9 совершает возвратно-поступательные движения в специальной направляющей 14, жестко связанной с корпусом К
Уплотняю1цая плита 3 снабжена направляющими стойками 15 для обеспечения ее вертикального движения относительно рамы 2о Величина взаимного перемещения плиты 3 и рамы 2 ограничивается расстоянием С между верхней поверхностью нижнего пояса 16 рамы 2 и установленными на концах направляющих стоек ограничительными тайками 17 Минимальное расстояние между нижней поверхностью нижнего пояса 16 рамы 2 и плитой 3 определяется величиной пре вьш1ения у относительно поверхности плиты 3 упругих ограничительных элементов 18, установленных на направляющих стойках 15о Между уплотняющей плитой 3 и .нижним поясом 16 рамы 2 размещены пружины 19 для безынерционного прижатия плиты к обрабатываемой среде с целью увеличения статического давления, что повьш1ает эффективность уплотнения или разрушения грунтов Рациональная величина взш1много пре- вьш1ения высот наковален Q и fl 5. в зависимости от величин г , г, 1,, l s, s и С назначается по расчету
10
Рама 2 вибротрамбовки имеет направляющие .20. для обеспечения вертикального движения корпуса 1 возбудителя колебаний, в верхней своей части 21 имеет проушины, одной из которых (проушина 23) присоединяется к рукояти 24 экскаватора или другому навесному устройству базовой машины, а другой - к штоку гидроцилиндра Такая подвеска рабочего органа позволяет осуществлять его работу и на наклонных участкахо
Между нижним поясом 16 рамы 2 и корпусом 1 возбудителя колебаний уста-15 ноБлены упругие ограничительные элементы 25 высотой d, предназначенные для демпфирования возбудителя колебаний при подъеме вибротрамбовки с помощью рамы 2 при необходимости ее перестановки на другое место. Расстояние А между нижним 16 иверхним 21 поясами рамы назначается неизменным
1. -
С целью обеспечения возможности за- 25
пуска возбудителя колебаний без нагрузки и возможности регулирования интенсивности силового воздействия на обрабатываемую среду путем одновреf гг
20
рыми корпус ударной час ти опирается на упругие ограничительные элементы рамы; высота нижнего пояса рамы в местах установки втулок дня направляющих стоек плиты; величина превьшгения установленных на направляющих стойках упругих ограничительных элементов относительно поверхностей рабочей плитыо Стабилизатор величины силы предварительного прижатия (натяга) инерционной массы к нижнему поясу рамы состоит из упоров 28 с закрепленными на них втулками 27, отверстий, которые предназначены для обеспечения возможности свободного перемещения в них направляющих 20 рамы 2, пружин 22, установленных на направляющих 20 с опиранием нижними концами на корпус 1 возбудителя колебаний-, а также устройств 29 для жесткого крепления упоров 28 к уплотняющей плите 3, напридителя колебаний и величины силы безынерционного прижатия ра бочей плиты к ограничителю длина направляющих стоек 15 плиты 3 на участке между верхней поверхностью установленных на них упругих ограничительных элементов 18 и ограничительными гайками 17 должна превосходить величину, определяемую по формуле
мер металлических планок, приваривае- мэнного изменения режима работы возбу- зо уборам и рабочей плите (фигзОо
Упоры 28 размещаются между верхним поясом 21 рамы 2 и верхними концами пружин 22 на таком удалении от рабочей плиты, что расстояние F меж35 ДУ верхним поясом рамы и верхней поверхностью упоров 28 в крайнем верхнем положении рамы, не меньше по величине, чем расстояние Е между нижней поверхностью нижнего пояса 16 р а40 мы и верхней поверхностью упругих ог раничительных элементов 18 при рассматриваемом положении рамыо
Стабилизатор может быть снабжен регулировочными гайками 26 для обес45 печения возможности изменения натяга посредством изменения величины g, устанавливаемого при регулировках расстояния между противоположными концами пружин в исходном положении ра50 мы,-
C r«+l,.
-d - е-f -,
где
S .
4
и L
d е соответственно радиус эксцентриситета кривошипа, длина шатуна,высота головки ползуна- ударника и высота наковальни кривошипно-ша- тунного элемента возбудителя колебаний с большим по величине радиусом кривошипа; высота упругих ограничительных элементов рамы;
расстояние от центра вращения эксцентрикового в ал а до пло с ко сти, проходящей через опорные поверхности, котоВибротрамбовка работает следугацим образомо
Крутящий момент от двигателя пере- гс дается на эксцентриковый вал 4 При этом ползуны-ударники 8 и 12 совершают возвратно-поступательные движения относительно корпуса 1 в своих направляющих
5
5
f гг
0
рыми корпус ударной части опирается на упругие ограничительные элементы рамы; высота нижнего пояса рамы в местах установки втулок дня направляющих стоек плиты; величина превьшгения установленных на направляющих стойках упругих ограничительных элементов относительно поверхностей рабочей плитыо Стабилизатор величины силы предварительного прижатия (натяга) инерционной массы к нижнему поясу рамы состоит из упоров 28 с закрепленными на них втулками 27, отверстий, которые предназначены для обеспечения возможности свободного перемещения в них направляющих 20 рамы 2, пружин 22, установленных на направляющих 20 с опиранием нижними концами на корпус 1 возбудителя колебаний-, а также устройств 29 для жесткого крепления упоров 28 к уплотняющей плите 3, наприВибротрамбовка работает следугацим образомо
Крутящий момент от двигателя пере- дается на эксцентриковый вал 4 При этом ползуны-ударники 8 и 12 совершают возвратно-поступательные движения относительно корпуса 1 в своих направляющих
Режимы,работы, а вместе с тем и з |ар актер силового воздействия на обабатываемую среду, зависят от положения рабочей плиты относительно оси годвески рамы вибротрамбовки к стрехе базовой машины,.которое может хаактеризоваться величиной расстояния
( от поверхности рабочей плиты 3 до Нижнего пояса рамы 2о
Так, при отсутствии силы прижатия
амы со стороны 16 стрелы, Тое„ кота Ь. С t )f, реализуется режим хо- jocToro хода, ибо в том случае /фиГоЛ
;олзуны-ударники вообще не могут со- : даряться со своими наковальнями,,
I По мере изменения (фигр и 2) вы- фотного положения рамы относительно 111литы в диапазоне от В (h) до ) 1 еализуются все режимы, характерные для известной вибротрамбовкИо В то )се время при предлагаемом конструк- ивном решении при всех положениях амы 2 относительно рабочей плиты 3 Обеспечивается неизменность в исход- состоянии расстояния g между про- фивоположными концами пружин 22, Тоео 1|1остоянство натяга или величины 1}1ачального зазора Это происходит по- фому., что при перемещении рамы от- йосительно плиты на вели -шну Е (при Изменении высотного положения нижне- пояса рамы относительно упоров от расстояния равного К, до расстояния, фавного Q К + Е, на такую же вели- (ину Е) увеличивается длина тех час- фей направляю 1их рамы, которые нахо- в промежутке между нижним поя- (|;ом рамы и упорамио Однако ослабления этом величины установленной сте- йёни предварительного поджатия пру- Жин 22 не происходит, тшс как одно- ззременно автоматически на такую же величину ,(в пределах от О до Е) при- зрднимается в исходном положении (при
неработающем двигателе) корпус возбудителя колебаний (фиго 2) относительно нижнего.пояса рамы, что обусловлено тем, что корпус через криво- шипно-шатунный механизм опирается на наковальни плиты
В отличие от известного вибротрамбовщика предлагаемый позволяет при необходимости осуществлять независимо друг от друга изменение силы статического безынерционного прижатия рабочей плиты к обрабатываемой среде и силы предварительного прижатия инерционной массы к нижнему поясу рамы, а также обеспечивать стабилизацию величины последней при любых положениях рамы относительно рабочей плиты, что дает возможность значительно расширить диапазон и повысить устойчивость реализуемых режимов работы вибротрамбовки с одновременным снижением (до 7%) энергоемкости процесса уплотнения и повьаиеннем эффективности и качества работы
Формула изобретения
Вибротрамбовка по авт.сво № 118750 о т л и ч а ю щ а я с я тем, что, с целью повышения эффективности уплотнения грунта, снижения энергоемкости процесса за счет стабилизации ве личинь силы предварительного прижатия инерционной массы к нижнему поясу рамы, она снабжена размещенными между верхним поясом рамь и пружинами для прижатия инерционной массы в сторону нижнего пояса рамы горизонтальными упораш со втулками, причем упоры жестко связаны с уплотняющей плитой посредством вертикальных стоек, а в отверстия втулки установлены с возможностью перемещения направляющие рамы о

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибротрамбовка | 1984 |
|
SU1187501A1 |
| Вибротрамбовка | 1983 |
|
SU1271921A1 |
| Вибротрамбовка | 1984 |
|
SU1192426A1 |
| Вибротрамбовка | 1981 |
|
SU974801A1 |
| Вибротрамбовка | 1980 |
|
SU878855A1 |
| Вибротрамбовка | 1982 |
|
SU1020479A1 |
| Стенд для испытаний изделий на тряску | 1985 |
|
SU1352277A1 |
| Вибротрамбовка | 1986 |
|
SU1418380A1 |
| Самоходная вибротрамбовка для уплотнения стенок траншей | 1981 |
|
SU977544A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |

Изобретение относится к строительной технике и предназначено преимущественно для уплотнения грунта в стесненных условиях строительства. Цель изобретения - повышение эффективности уплотнения грунта, снижение энергоемкости процесса за счет стабилизации величины силы предварительного прижатия инерционной массы к нижнему поясу рамы. Вибротрамбовка содержит наковальню 10, уплотняющую плиту 3 с направляющими стойками 15, соединенный с инерционной массой 1 кривошипно-шатунный привод ударного механизма со смещенными по фазе равновеликими кривошипами 6 и 7, соединенными с основным и дополнительным шатунами 8 и 11, на свободных концах которых закреплены ползуны-ударники 9 и 12, один из которых охватывает другой, раму 2, смонтированную на направляющих стойках 15 плиты 3 и подпружиненную в нижней части относительно плиты 3, а в верхней части - относительно инерционной массы 1, и упругие ограничительные элементы 18, размещенные между нижним поясом рамы 2 и плитой 3 и между нижним поясом рамы 2 и инерционной массой 1, причем инерционная масса 1 смонтирована на раме 2 с возможностью ее перемещения относительно вертикально расположенных направляющих 20. Между верхним поясом рамы 2 и пружинами для прижатия инерционной массы в сторону нижнего пояса рамы размещены горизонтальные упоры 28 со втулками 27, причем упоры 28 жестко связаны с уплотняющей плитой 3 посредством вертикальных стоек 29, а в отверстия втулки 27 установлены с возможностью перемещения направляющие 20 рамы 2. 2 ил.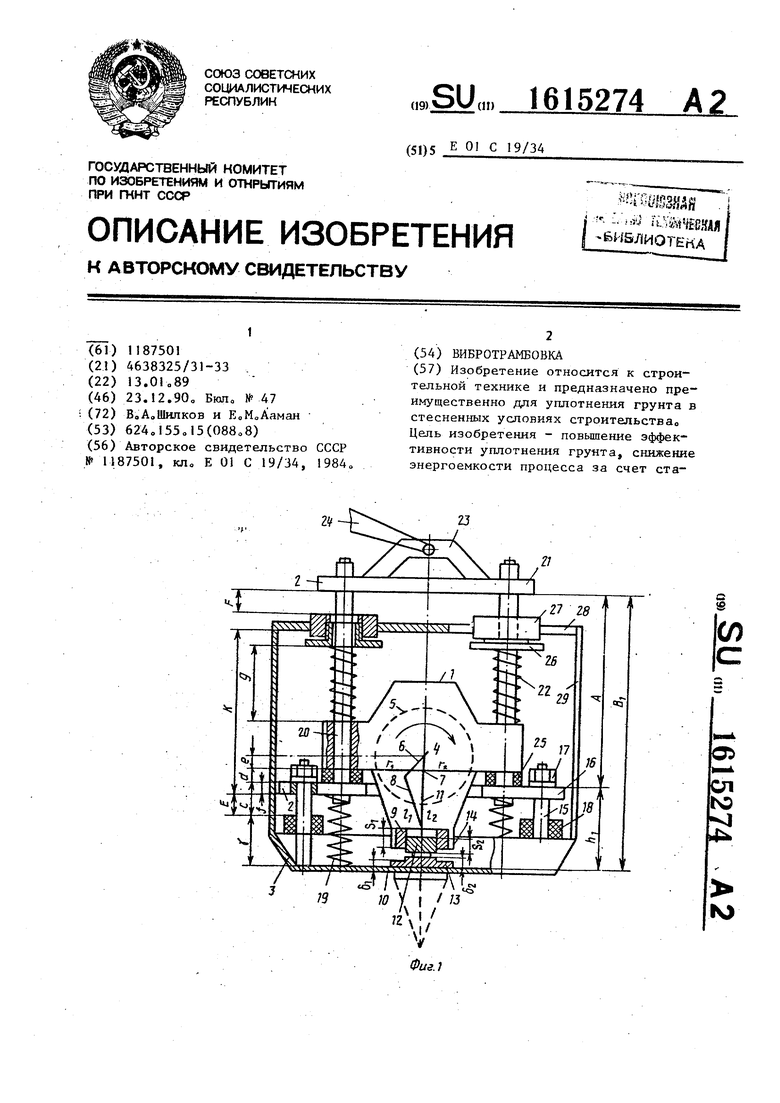
Фиг. 2
| Генератор нестационарного случайного импульсного процесса | 1987 |
|
SU1587501A1 |
