W
4
00
ел
О)
кн .мас;е опсчрожиешюго М и наполненного MI, бункера 1 , я также устав- ка прс.шчгюдитеньностн дозирования iQ, Сигнал о массе материала N5 в бункере 1, измеряемый силоизмеритель- Иым преобраз(),вателем 2, поступает в магистрал, 18 через аналого-цифровой преобразователь (АЦП) Ю, а измеренный расходомером 7 расход материала QP - через ци4 роаналоговый преобразователь (ЦЛП) 1.1. Управляющее воздействие Up на устройство определяется вычислительным блоком 16 путем сравнения уставки и выработки сигнала коррекции Q . Сигнал Up через 1Ц1фроаналоговый преобразователь
(iLiMI) 12 поступает на пхпд усилители 8 мощности для УПТ1ПН.ГИ-НИЯ привоД|.1М 4 разгружающего элемента 3. Влок 16 определяет суммарную массу отдозиро- ванпого материала П и формирует команду Пуск при снижении массы Mg до значения, равного уставке М. Блок 16 затем снимает, эту команду, если масса М станет равной значени уставки МJJ, Команда Пуск через модуль 13 вывода дискретных сит налов поступает на привод 6 загружающего элемента 5. Все значения.масс отображаются индикатором 15 и транслируются во внешние устройства через модуль ,17 связи. 2 ил.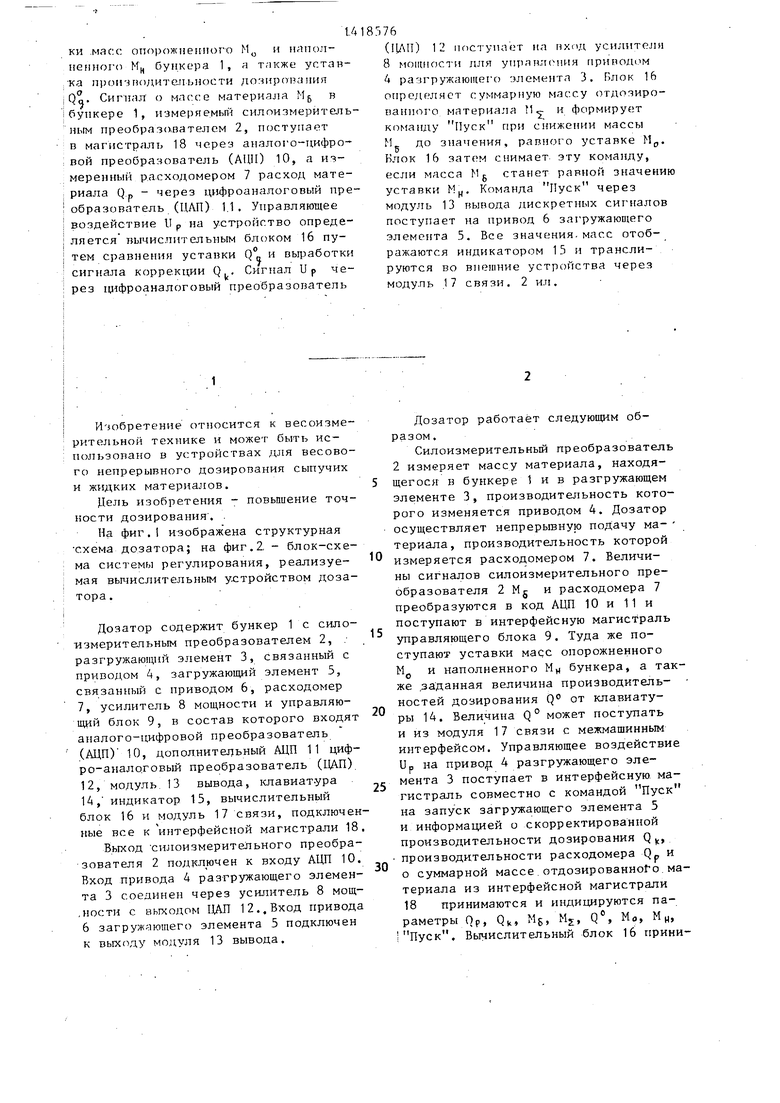
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОТОЧНЫЙ РАСХОДОМЕР-ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2012 |
|
RU2509986C2 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1310643A1 |
| ВЕСОВОЙ РАСХОДОМЕР-ДОЗАТОР | 2016 |
|
RU2634325C1 |
| ВЕСОВОЙ КОМБИНАЦИОННЫЙ ДОЗАТОР | 2021 |
|
RU2775198C1 |
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
| Дозатор непрерывного действия | 1978 |
|
SU771471A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Система управления лотковым вибродозатором для шаровых мельниц | 1984 |
|
SU1237252A1 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |
| Весовой дозатор-расходомер | 1981 |
|
SU1055970A1 |
Изобретение относится к весоизмерительной технике и может быть использовано при дозировании сьту- чих и жидких материалов. Цель изобретения - повышение точности дозирования. Устройство осуществляет непрерывную подачу материала как в режиме загрузки, так и в режиме разгрузки бункера 1. От клавиатуры 14 в интерфейсную магистраль 18 управляющего блока 9 поступают устав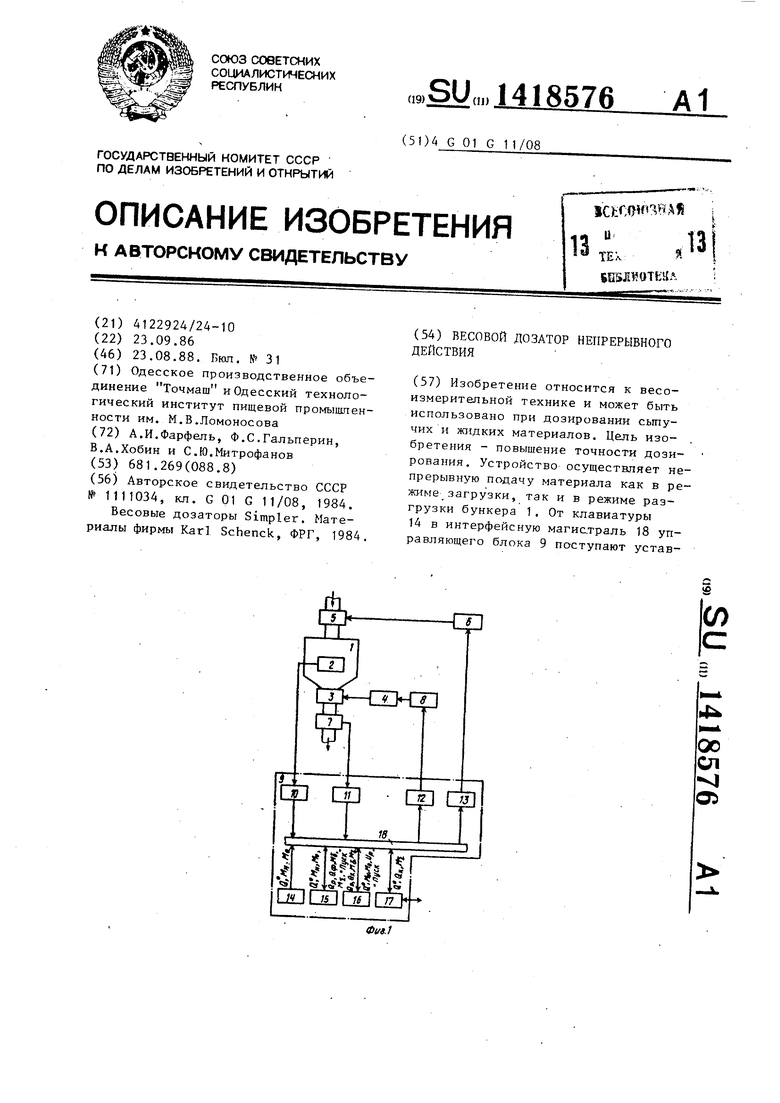
Изобретение относится к весоизмерительной технике и может быть использовано в устройствах для весового непрерывного дозирования сыпучих и жидких материалов.
Цель изобретения - повьпиение точности дозирования . .
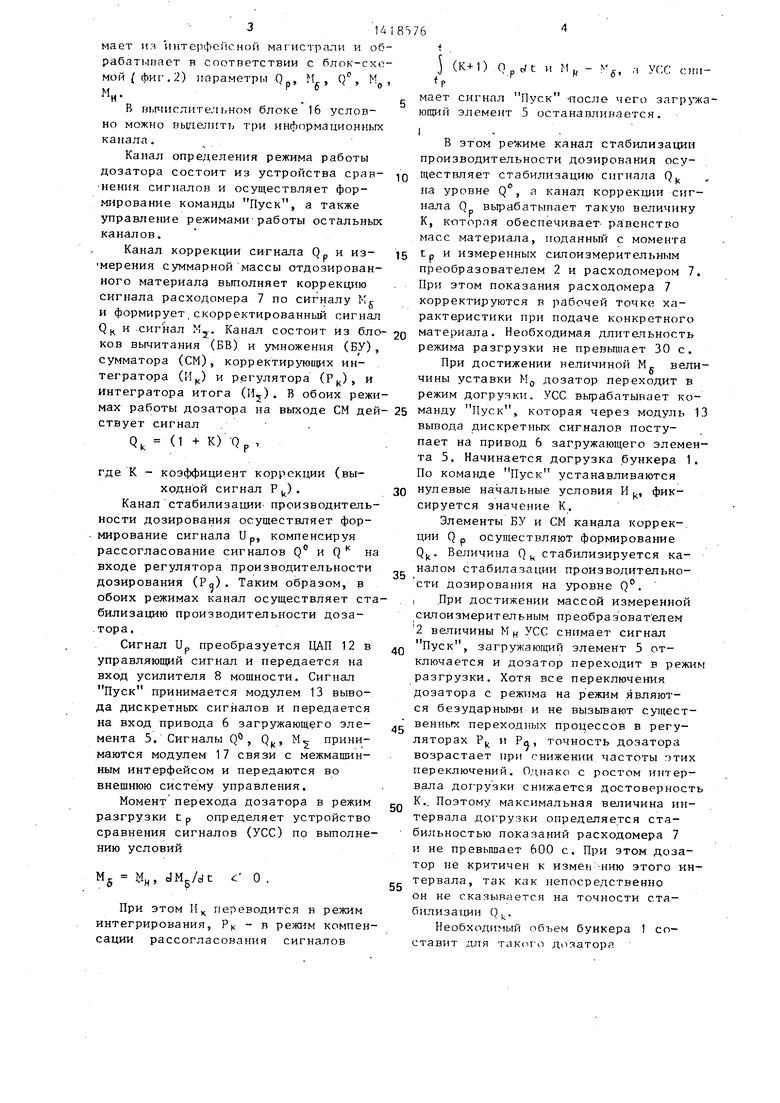
На фиг.1 изображена структурная схема дозатора; на фиг.2, - блок-схема системы регулирования, реализуемая вычислительным устройством дозатора.
Дозатор содержит бункер 1 с сило- измерительным преобразователем 2, . разгружающий элемент 3, связанный с приводом 4, загружающий элемент 5, связанный с приводом 6, расходомер 7, усилитель 8 мощности и управляющий блок 9, в состав которого входят аналого-цифровой преобразователь (АЦП) 10, дополнительный АЦП 11 цифро-аналоговый преобразователь (ПДП) 12, модуль. 13 вывода, ютавиатура 14, индикатор 15, вычислительный блок 16 и модуль 17 связи, подключенные все к интерфейсной магистрали 18.
Выход силоизмерительного преобразователя 2 подключен к входу АЦП 10. Вход привода 4 разгружающего элемента 3 соединен через усилитель 8 мощ- .ности с выходом ПДП 12.. Вход привода 6 загружающего элемента 5 подключен к выходу модуля 13 вывода.
5
Дозатор работает следующим образом.
Силоизмерительный преобразователь 2 измеряет массу материала, находящегоси в бункере 1 и в разгружающем элементе 3, производительность которого изменяется приводом 4. Дозатор осуществляет непрерывную подачу на- териала, производительность которой
измеряется расходомером 7. Величины сигналов силоизмерительного преобразователя 2 Mg и расходомера 7 преобразуются в код АЦП 10 и 11 и поступают в интерфейсную магистраль управляющего блока 9. Туда же поступают уставки масс опорожненного Мр и наполненного М бункера, а также заданная величина производитель- костей дозирования Q° от клавиатуры 14. Величина Q° может поступать и из модуля 17 связи с межмашинньм интерфейсом. Управляющее воздействие Up на привод А разгружающего элес мента 3 поступает в интерфейсную магистраль совместно с командой Пуск на запуск загружающего элемента 5 и информацией о скорректированной производительности дозирования Q j, производительности расходомера Qp и о суммарной массе отдозированноГо материала из интерфейсной магистрали 18 принимаются и индицируются параметры Ор, Q, Mg, Mj, Q, Mo, MH, , Вычислительный блок 16 прини0
3
мает 113 иптерфс)1сной магистргшн и орабатывает в соответствии с блок-схмой ( фиг. 2) параметры Q., М ., Q , М М„.
В вьмислител1)Ном блоке 16 условно можно выделить три информационны канала.
Канал определения режима работы дозатора состоит из устройства срав нения сигналов и осуществляет формирование команды Пуск, а также управление режимами-работы остальны каналов.
Канал коррекции сигнала Qp и из- мерения суммарной массы отдозирован ного материала вьтолняет коррекцию сигнала расходомера 7 по сигналу М и формирует.скорректированный сигна Q1 и сигнал Mj. Канал состоит из блков вычитания (БВ) и умножения (БУ) сумматора (СМ), корректир тощих интегратора (.l-lff) и регулятора (РК), и интегратора итога (И.) . В обоих режмах работы дозатора на выходе СМ дествует сигнал
Q (1 + К) -Qp ,
где К - коэффициент коррекции (выходной сигнал Р () .
Канал стабилизации производительности дозирования осуществляет формирование сигнала Up, компенсируя рассогласование сигналов Q и Q н входе регулятора производительности дозирования (Ро) . Таким образом, в обоих режимах канал осуществляет стбилизацию производительности доза- -тора.
Сигнал Up преобразуется ЦАП 12 в управляющий сигнал и передается на вход усилителя 8 мощности. Сигнал Пуск принимается модулем 13 вывода дискретных сигналов и передается на вход привода 6 загружающего элемента 5. Сигналы Q , Q, М принимаются модулем 17 связи с межмашинным интерфейсом и передаются во внешнюю систему управления.
Момент перехода дозатора в режим разгрузки tp определяет устройство сравнения сигналов (УСС) по выполнению условий
Mg М, cJMg/dt О .
При этом i ц; переводится в режим интегрирования, РК - в компенсации рассогласования сигналов
(К+О QP c/t и М - N ,
мает сигнал Пуск -после чего ющий элемент 5 останавливается.
0
5
0
5
0
5
0
5
0
5
I
В этом режиме канал стабилизации
производительности дозирования осуществляет стабилизацию сигнала Q на уровне Q , а канал коррек1лии сигнала Q вырабатывает такую величину К, которая обеспечивает- равенство масс материала, поданный с момента tp и измеренных силоизмерительным преобразователем 2 и расходомером 7. При этом показания расходомера 7 корректируются в рабочей точке характеристики при подаче конкретного материала. Необходимая длрггельность режима разгрузки не превьпчает 30 с.
При достижении величиной Mg величины уставки MQ дозатор переходит в режим догрузки. УСС вырабатывает команду Пуск, которая через модуль 13 вывода дискретных сигналов поступает на привод 6 загружающего элемента 5. Начинается догрузка бункера 1. По команде Пуск устанавливаются нулевые начальные условия И (, фиксируется значение К.
Элементы БУ и СМ канала коррекции Q р осуществляют формирование QI. Величина Q стабилизируется каналом стабилазации производительно- сти дозирования на уровне Q°. При достижении массой измеренной силоизмерительным преобразоват елем 2 величины Мц УСС снимает сигнал Пуск, загружающий элемент 5 отключается и дозатор переходит в режим разгрузки. Хотя все переключения дозатора с режима на режим являются безударными и не вызьшают существенных переходных процессов в регуляторах Р( и Рп , точность дозатора возрастает при снижении частоты этих переключений. Однако с ростом интервала догрузки снижается достоверность К.. Поэтому максимальная величина интервала догрузки определяется стабильностью показаний расходомера 7 и не превышает 600 с. При этом дозатор не критичен к измен шию этого интервала, так как непосредственно он не сказывается на точности стабилизации 0.
Необходимый объем бункера 1 составит для такиго дозатора
14
V J2- 2--«ii- ,
3600 fMUH
где QMWKC - наибольший предел проиводительности;
о- минимальная плотность
гмин
:(насыпная) дозируемого
;материала.
Необходимая производительность загружающего элемента 6 состав ляет
Q-J 1,05 QMc,kc- формула изобретени
Весовой дозатор непрерывного дей- (J;TBHH, содержащий установленный на с;илоизмерительный преобразователь fiyHKep с разгружающим элементом, при под которого подключен к усилителю ющности, загружающий элемент с при- 1ЮДОМ и управляютций блок, содержащий
576-6
подключенные к интерфейсной магистрали вычислительный блок, клавиатуру, индикатор, аналого-дифровой преобразователь, цифроаналоговый преобразо- ватель, модуль связи и модуль вывода, причем выход силоизмерительного преобразователя подключен к входу аналого-цифрового преобразователя, вход привода разгружающего элемента соединен через усилитель мощности с выходом цифроаналогового преобразователя, а вход привода загружающего элемента подключен к выходу модуля вывода, отличающий- с я тем, что, с целью повышения точ ности дозирования, в него введены расходомер выходного потока материала, а в управляющий блок - дополнительный аналого-цифровой преобра0
15
20
зователь, через который выход расходомера связан с интерфейсной магистралью. ,
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весовые дозаторы Simpler | |||
| Материалы фирмы Karl Schanck, ФРГ, 1984. | |||
