Изобретение относится к дозированию сыпучих материалов.
Целью изобретения является повы,тение точности управления.
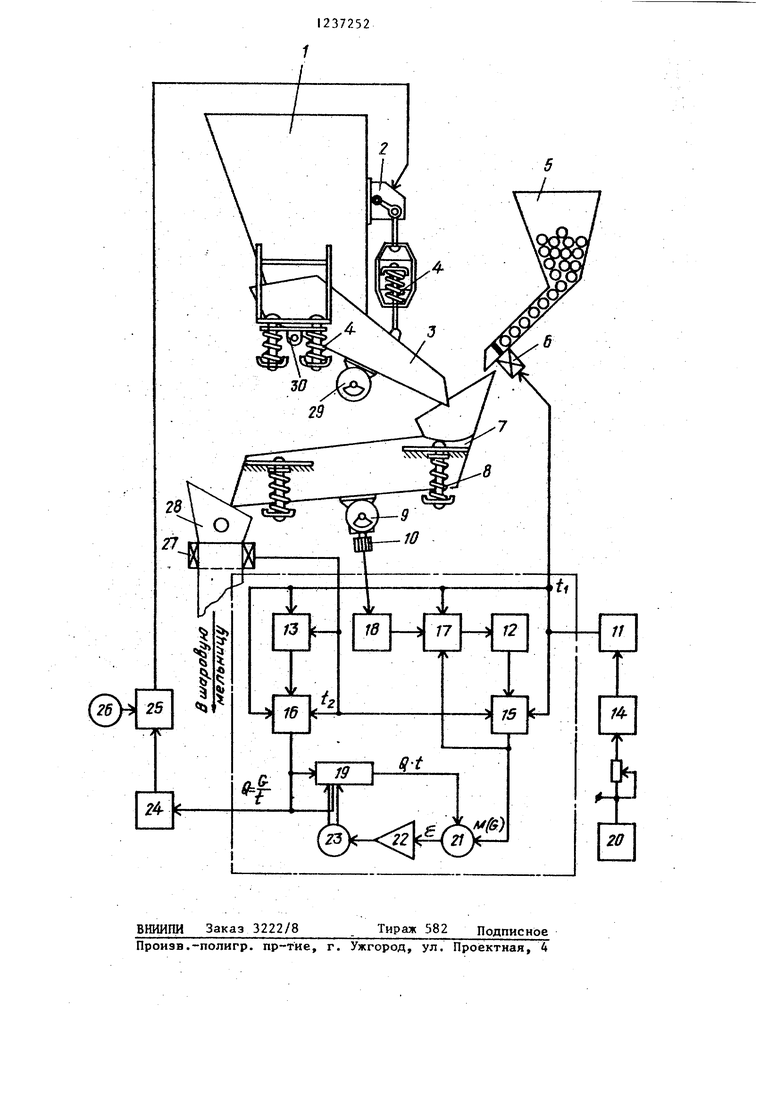
На чертеже представлена система управления лотковым вибродозатором.
Система управления лотковым вибродозатором содержит бункер 1 исходного сыпучего материала, исполнительный механизм 2 лоткового вибропитате ля 3, подвешенного на пружинной подвеске 4 к бункеру 1. Рядом с бункеро 1 установлено устройство одношари- ковой догрузки мелющих тел, состояще из бункера 5 шара с электромагнитным исполнительным механизмом 6 шаропита теля для одношариковой подачи мелющих тел в лоток 7. Лоток 7 дозатора установлен с постоянным углом наклона и подвешен на пружинной подвеске S . Колебания лотка создаются дебалан сным вибровоябудителем 9. Кроме того вибродозатор содержит вибродатчик 10
Лрограммное реле времени 11,-интеграторы 12, 13 и 14, ключи 15, 16 и 17, преобразователь 18 веса, линейный потенциометр 19, датчик 20 мощности, блок 21 Вычитания, операционный усилитель 22, реверсивный двигатель 23, вторичный прибор 24, регулятор 25 с задатчиком 26. Вибродозатор содержит также детектор шара 27 у течки 28, дебалансные возбудители 29. Наклон лотка осуществляется относительно полуосей 30.
Система управления лотковым вибродозатором для шаровых мельниц работает следующим образом.
Регулируемая подача из бункера
1сьтучего материала осуществляется путем изменения угла наклона вибропитателя 3 исполнительным механизмом
2в зависимости от сигнала регулятора 25 производительности. Сыпучий материал подается в лоток 7 вибродозатора, проходя по которому пада- в течку 28. Производительность Q дозатора определяется формулой
,6 - 3,6 . (т/ч)
Q - расход сыпучего материала,
т/ч;
G - вес материала на лотке, кг; V - линейная скорость сыпучего
материала, м/с; L - длина лотка, м; t - время движения материала по лотку, с.
15
20
5
Ю
2372521
Таким образом, .задача определения расхода сыпучего материала сводится к одновременному измерению чеса материала на лотке и его скорости, либо времени движения потока материала по лотку. Вес сыпучего материала, находящегося на пото.кочувствительном элементе-лотке вибродозатора, можно определить достаточно просто с помощью датчика веса или по амплитуде вибрации лотка, которая пропорциональна количеству материала на лотке и измеряется с помощью вибродатчика 0. В качестве поток.очувствительного элемента, определяющего скорость потока материала по лотку, используется металлический шар.
Известно, что в.шаровых мельницах измельчение материала происходит за счет энергии падающих шаров, которые в процессе работы подвержены интенсивному истиранию.
Наиболее эффективной является непрерывная одношариковая догрузка шаров в мельницу по мере их. износа, а не одноразовая через несколько суток, например,, по косвенному параметру износа - мощности, потребляемой электроприводом мельницы, пропорциональ- 30 ной шаровому заполнению.
Для определения скорости потока материала в лоток дозатора подается щар.из бункера 5 шаров с помощью шаропитателя и фиксируется его про- хожд,ение на выходе из лотка с помощью детектора 27 шара, представляющего собой, например, катушку индуктивное- ти или емкость 9 а по времени прохождения щара по лотку определяется скорость потока материала. Шар, находящийся в потоке сыпучего материала, движется с одинаковой с ним скоростью. Время срабатывания щаропита- теля задается либо только програм- мным реле времени 1i с одинаковой расчетной скважностью, либо дополнительно корректируется датчиком контроля износа мелющих тел, например датчиком 20 мощности.электропривода мельницы.
25
35
40
45
50
Схема измерения производительности лоткового вибродозатора работает следующим образом.
Исходное состояние. Ключ 5 замк- 55 нут и пропускает сигнал с преобразователя 8, пропорциональный весу G, на вход интегратора 12, реализующий среднее значение по формуле
I/
I X(T-t)d,.
5
10
i-T
где Т - постоянная времени интегрирования;
t - текущее время; Т - переменная интегрирования; X - напряжение, пропорциональное
весу G.
Ключ 17 разомкнут и среднее значение веса M(G) не поступает на блок 21 вычитания. Ключ 16 разомкнут. Выходное напряжение интеграт ора 13 рав- . но нулю.
Работа сх емы измерения произво- 15 дительности. По команде программного реле времени шаропитатель периодически сбрасывает стандартный металлический шар из бункера 5 на вход лотка 7 дозатора, одновременно запус- 20 кается интегратор 13 и на ключи 15« 16 и 17 подают импульс с программного реле времени, подтверждающий их
исходные состояния, а именно: ключ 15 открыт, ключи 16 и 17 закрыты. 25 Как только с детектора шара 27 поступает импульс, который: останавливает .интегратор 13 (выходное напряжение которого пропорционально времени и), открывает ключ 16 (тем са- 30 мым про пуская напряжение интегратора 13 на вход линейного потенциометра I9) и открывает ключ 17, напряжение , пропорциональное среднему значению веса M(G), проходит на вход 35 блока 21 вычитания. Ключ 17, срабатывая, воздействует на ключ Г5, который отключает вьсход преобразователя 18 веса от интегратора 12. Далее операционный усилитель 22 с ли- дд нейным потенциометром 19 в цепи обратной связи осуществляет деление двух постоянных величин
UMWI
и . 45
где и - напряжение интегратора 13,
пропорциональное времени; и .- напряжение интегратора 12,
пропорциональное среднему Q значению веса G. Процесс деления осуществляется следующим образом. На блок вычитания 21 подаются два напряжения UQ U. На выходе вычитающего устройства
5
10
.
37252
формируется сигнал ошибки , равный разности Ug.
,(GV
Этот сигнал, проходя операционный усилитель 22, воздействует на реверсивный двигатель 23, который перемешает подвижный контакт линейного потенциометра 19, отрабатывая сигнал ошибки до нуля. При равенстве двигатель 23 останавливается и со средней точки контакта линейного потенциометра согласно выражению
(} Ut-UM(a)
снимается напряжение, пропорциональное частному от деления
,, UMC)
V u; .
Этот сигнал записывается на вторичном приборе 24, Напряжение с датчик обратной связи вторичного прибора 2 подается на вход регулятора 25, который сравнивает текущее значение параметра (количество сыпучего материала на лотке 7 дозатора) с за- данным уставкой задатчика 26 и в зависимости от знака рассогласования текущего значения регулятора 25 управляет исполнительным механизмом 2 изменяющим с помощью угла наклона вибропитателя 3 производительность дозатора.
Коррекция времени подачи шаров в мельницу осуществляется следзто- щим образом.
С датчика 20 мощности сигнал, пропорциональный мощности электропривода мельнищл, подается на интегратор 14. В момент равенства напряжения на выходе интегратора 14 пороговому значению, последний вьздает импульс в программное реле времени 11 на коррекцию времени подачи щара в мельницу через лоток дозатора.
Таким образом, система управления дозатором мелющих тел в мельницу через лоток вибродозатора позволяет не только с высокой точностью и надежностью определить среднюю скорость вибротранспортирования ма- ттериала, но и стимулировать непрерывную одношариковую догрузку шаровой мельницы на предприятиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления барабанной мельницей | 1974 |
|
SU521012A1 |
| Шаровая мельница | 1991 |
|
SU1794476A1 |
| Способ автоматического управления заполнением мельниц сливного типа | 1982 |
|
SU1034780A1 |
| Способ управления шаровыми мельницами | 1987 |
|
SU1414462A1 |
| Шаровая мельница | 1987 |
|
SU1435289A1 |
| Способ управления процессом измельчения материала | 1982 |
|
SU1080869A1 |
| КОМПЛЕКС СРЕДСТВ ДЛЯ ПРОИЗВОДСТВА МИНЕРАЛЬНОГО ПОРОШКА | 2000 |
|
RU2194575C2 |
| Способ регулирования загрузкой барабанной мельницы мелющими телами | 1974 |
|
SU507357A1 |
| Система регулирования загрузки шаров в мельницу | 1974 |
|
SU473522A1 |
| Устройство управления легковым вибропитателем | 1990 |
|
SU1727908A1 |
ВНИИПИ Заказ 3222/8
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 582 Подписное
| Лотковый вибропитатель для сыпу-чиХ МАТЕРиАлОВ | 1978 |
|
SU797979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
