Изобретение относится к весоизмерительной технике, в частности к устройствам непрерывного весового дозирования, и может быть использовано в безленточных весовых дозаторах непрерывного действия при дозировании сыпучих и жидких материалов.
Цель изобретения - повышение точности дозирования.
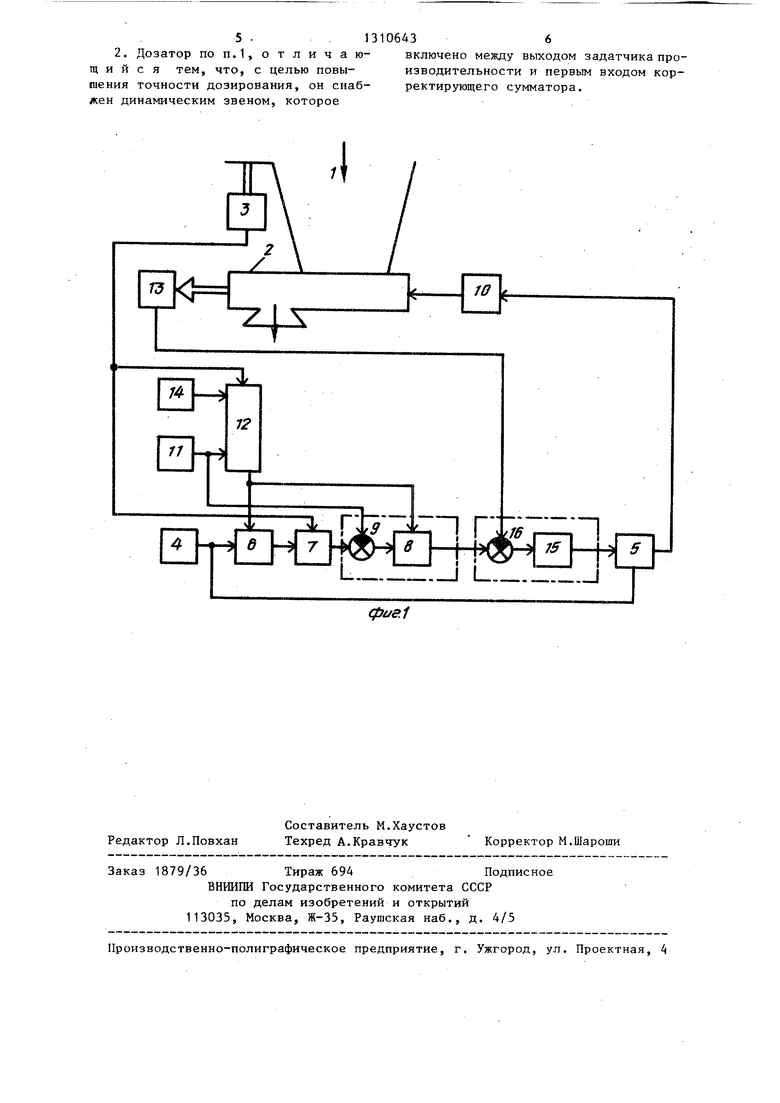
На фиг.1 и 2 показаны структурные схемы весового дозатора непрерывного действия.
Предлагаемое устройство содержит бункер 1 с питателем 2, установленны
на силоизмерительный преобразователь
I
3, задатчик 4 производительности, корректирующий сумматор 5, интегратор 6; сумматор 7, регулятор 8 массы с первым элементом 9 сравнения усилитель 10 мощности, задатчик 11 массы материала в бункере, устройство 12 сравнения сигналов, датчик 13 скорости привода питателя, задатчик массы 14 опорожненного бункера, регулятор 15 скорости привода питателя со вторым злементом 16 сравнения.
Дозатор работает в двух режимах, которые определяются устройством 12 сравнения сигналов.
В режиме разгрузки расходного бункера происходит уменьшение сигнала силоизмерительного преобразователя 3, величина которого больше величины сигнала задатчика 14 массы опорожненного бункера, но меньше величины сигнала задатчика 11 массы материала в бункере. При этом .срабатывает устройство 12 сравнения сигналов, которое переводит интегратор 6 в режим интегрирования, а регулятор 8 массы - в режим компенсации рассогласования сигналов на входе элемента 9 сравнения.
Режиму догрузки соответствует увеличение сигнала силоизмерительного преобразователя 3 либо выход этого сигнала из интервала, установленного задатчиками 14 и 11. При это устройство 12 сравнения сигналов переводит интегратор 6 в режим установки начальных условий, а регулятор 8 массы - в режим памяти.
В обоих режимах расходный бункер разгружается питателем 2. Масса материала, находящегося в расходном бункере 1 и на питателе 2, измеряется силоизмерительным преобразователем 3 сигнал которого поступает на вход
сумматора 7 и устройства 12 сравнения сигналов.
Когда дозатор находится в режиме догрузки, причем сигнал силоизмерительного датчика 3 больше величины сигнала задатчика 11 массы материала в бункере, то вследствие работы питателя 2 расходный бункер 1 разгружается и сигнал силоизмерительного преобразователя 3 уменьшается. При этом выполняется автоматическая установка начальных условий интегратора . 6, а регулятор 8 массы отключается и находится в режиме памяти своего выходного сигнала.
При достижении равенства сигналов силоизмерительного преобразователя 3 и задатчика 11 массы материала в бункере срабатывает устройство 12 сравнения сигналов и дозатор переводится в режим разгрузки. Интегратор 6 интегрирует задание, поступающее от з а- датчика 4 производительности, формирует сигнал заданной суммарной массы отдозированного материала, который суммируется сумматором 7 с сигналом, поступающим от силоизмерительного преобразователя 3. При равенстве фактической и заданной производительнос- тей дозатора сигнал на выходе сумматора 7 должен быть равен сигналу задатчика 11 массы материала в бункере. При отклонении фактической производительности дозатора от заданной
появляется рассогласование сигналов на входе первого элемента 9 сравнения, с выхода которого величина этого рассогласования поступает на вход регулятора 8 массы, формирующего сигнал заданной скорости питателя 2, который сравнивается вторым элементом 16 сравнения регулятора 15 скорости привода питателя с сигналом фактической скорости, поступающим от датчика
13 скорости привода питателя. Корректирующий сигнал, сформированный регулятором 15 скорости привода питателя, суммируется корректируюш 1м сумматором 5 с сигналом задатчика 4 производительности. Управляющий сигнал поступает с выхода корректирующего сумматора 5 через усилитель 10 мощности на вход питателя 2, привод которого изменяет свою скорость, компенсируя отклонение фактической производительности дозатора от заданной величины. Кроме того, в режиме разгрузки на выходе регулятора 8 массы
3
автоматически устанавливается сигнал величина которого пропорциональна скорости привода питателя 2, соотве ствующей работе дозатора с заданной производительностью, причем для регулятора 15 скорости привода питателя этот сигнал выступает в качестве задающего воздействия.
Таким образом, в режиме разгрузки дозатор реагирует на отклонение производительности, вызванное нестабильностью свойства дозируемого материал и его истечения из расходного бункера 1, которое компенсируется регулятором 8 массы, и нестабильностью ско рости питателя 2, которая компенсируется регулятором 15 скорости привода питателя.
По мере опорожнения питателя 2 расходного бункера 1 сигнал силоиз- мерительного датчика 3 уменьшается и в момент равенства его сигналу задат чика 14 массы опорожненного бункера срабатывает устройство 12 сравнения сигналов, которое переводит дозатор в режим догрузки в котором догрузка расходного бункера 1 осуществляется без прекращения дозирования. Интегратор 6 переходит в режим установки начальных условий, а регулятор 8 массы - в режим памяти, причем сигнал на его выходе остается постоянйым и регулятор 15 скорости привода питателя стабилизирует скорость привода питателя 2 на соответствующем уровне, компенсируя отклонение сигналов на входе второго элемента 16 сравнения. Корректирующий сумматор 5, усилитель 10 мощности и питатель 2 работает так же, как и в режиме догрузки.
Таким образом, в режиме догрузки компенсируется отклонение производительности дозатора, вызванное нестабильностью скорости привода питателя 2.
Связь задатчика 4 производительности с корректирующим сумматором 5 предназначена для повыщения быстродействия системы управления дозаторо при выводе его на заданную производительность и при его переводе с одной производительности на другую. Однако эта связь не обеспечивает высокой точности дозирования, так как она не учитывает динамических свойств дозатора и его системы управления (их передаточных функций).
Для увеличения точности дозирования дозатор снабжен динамическим зве- ном 17 (фиг.2), через которое выход задатчика 4 производительности связан с третьим входом корректирующего сумматора 5, причем предаточная функция динамического звена 17 зависит от передаточных функций дозатора и его, системы управления.
Таким образом, повышается точность, дозирования, в результате чего уменьшается перерасход дорогостоящих материалов и обеспечивается требуемое их количество при производстве конечного продукта.
Формула изобретения
25
1 . Весовой дозатор непрерывного .20 действия, содержащий расходный бункер с питателем, установленные на сило- измерительный преобразователь задат- чик производительности, выход которого соединен с входом интегратора и с первым входом корректирующего сумматора, выход которого через усилитель мощности подключен к входу привода питателя, выход интегратора соединен с первым входом сумматора, вторым входом подключенного к выходу- силоиз- мерительного преобразователя и к первому входу устройства сравнения сигналов, регулятор массы, входом соединенный с выходом первого элемента 35 сравнения, первый вход которого подключен к выходу сумматора, а второй вход соединен с выходом задатчика массы материала и с вторым входом устройства сравнения сигналов, отличающийся тем, что, с целью повыщения точности дозирования, он снабжен датчиком скорости привода питателя, задатчиком массы опорожненного бункера, вторым .элементом сравнения, регулятором скорости привода питателя, причем выход задатчика массы опорожненного бункера подключен к третьему входу устройства сравнения сигналов, выходом соединенного с управляющим входами интегратора и регу- лятора. массы, выход которого подключен к второму входу второго элемента сравнения, первым входом соединенного с выходом датчика скорости привода питателя, а выходом - через регулятор скорости привода питателя - с вторым входом корректирующего сумматора.
30
40
45
0
5
2. Дозатор по п.1, о т л и ч а ю- щ и н с я тем, что, с целью повышения точности дозирования, он снабжен динамическим звеном, которое
Редактор Л.Повхан
Составитель М.Хаустов Техред А.Кравчук
Заказ 1879/36 Тираж 694Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
включено между выходом задатчика производительности и первьтм входом корректирующего сумматора.
Корректор М.Шароши

| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1339410A2 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1418576A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Дозатор сыпучих материалов | 1986 |
|
SU1432338A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1255867A1 |
Изобретение относится к весоизмерительной технике и может быть использовано в безленточных весовых дозаторах непрерывного действия при дозировании сыпучих и жидких материалов. Цель изобретения - повышение точности дозирования. Устройство обеспечивает в режиме разгрузки расходного бункера 1 компенсацию отклонения производительности дозатора, вызванного нестабильностью свойств дозируемого материала и его истечения из расходного бункера 1, которое компенсируется регулятором 8 массы, и нестабильностью скорости привода питателя 2, которая компенсируется регулятором 15 скорости привода питателя. Б режиме догрузки расходного бункера 1 устройство обеспечивает компенсацию отклонения производительности дозатора, вызванного нестабильностью скорости привода питателя 2, Для достижения цели изобретения используется также динамическое звено 17, через которое задатчик 4 производительности связан с входом коррек- тирующего сумматора 5. Передаточная функция динамического звена 17 зависит от передаточной функции дозатора и его системы управления. 1 з.п.ф-лы,2 ил. (Л икг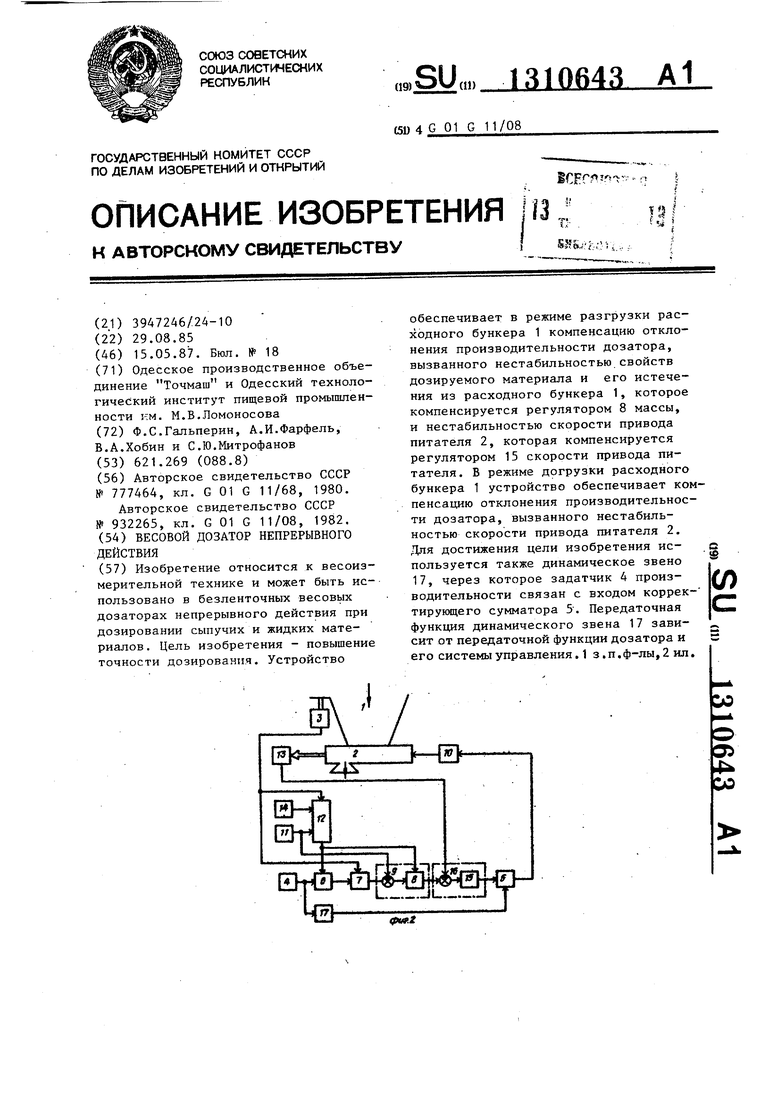
| Весовой дозатор непрерывного действия | 1978 |
|
SU777464A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
