Изобретение относится к устройствам для онределения скорости отклонения физической величины от требуемого (программного) значения по данным расчетных параметров дискретных систем управления и системам обработки результатов экспериментальных исследований .
Цель изобретения - расширение функциональных возможностей устройства путем определения интервалов времени с градиентом отклонения от заданной величины, превьшающим заданные значения, при одновременном определении этого . отклонения.
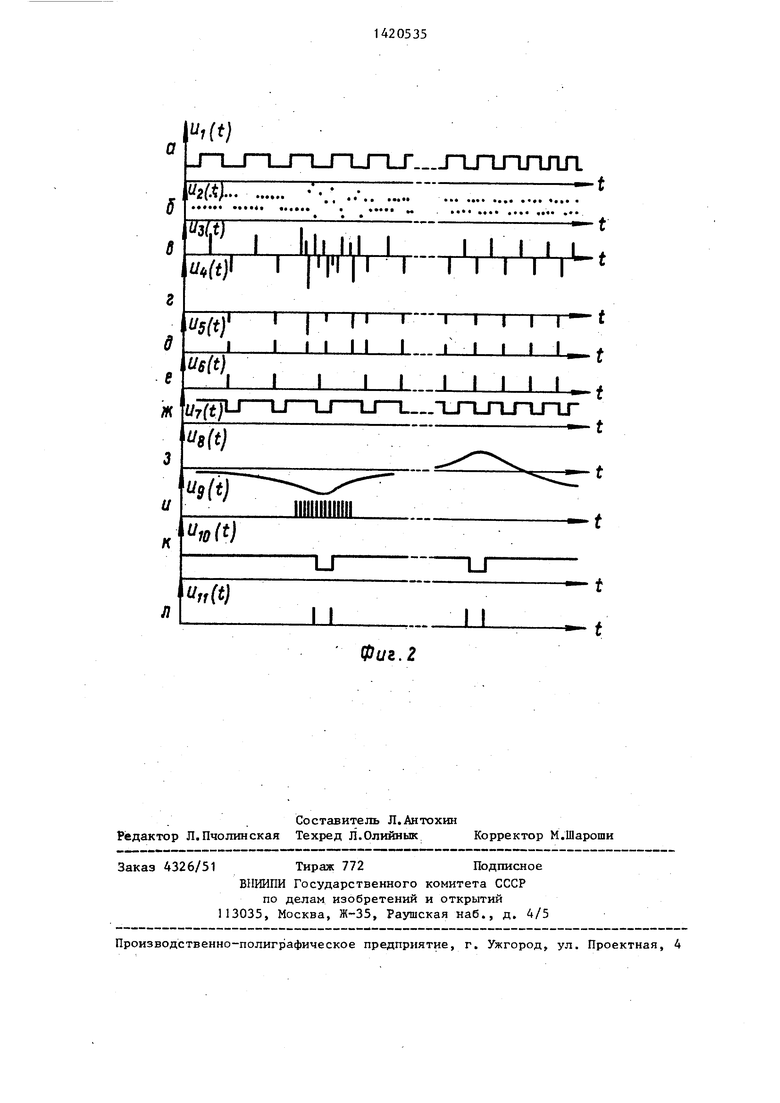
На фиг.1 приведены функциональная схема устройства; на фиг,2 - графики поясняющие работу устройства.
Устройство для определения скорости отклонения физической величины от требуемого значения содержит датчик- интегратор 1, ждущий мультивибратор 2, блок 3 сравнения, генератор 4. программ , дифференцирующую цепочку 5 блок 6 редактирования, авторегулятор 7, генератор 8 меток времени, амплитудный селектор 9, формирователь 10 им пуль со в, ан ало го-цифров ой преобразователь (АЦП) 11, триггер 12, коррелятор 13, блок 14 сравнения, вычислитель 15, регистр 16, причем первый вход датчика 1 является входом устройства, а второй подключен к выходу авторегулятора 7, выход датчика 1 подключен к входу дифференцирующей цепочки 5, анод ждущего мультивибратора 2 подключен к первому входу блока 3 сравнения, а вход - к первому выходу блока 6 редактирования, второй вход блока 3 сравнения соединен с первым выходом генератора 4 программ, генератор программ 4 вторым выходом подключен к первому входу регистра 16, выход дифференцирующей цепочки 5 подключен к входу амплитудного селектора 9, первьй вход блока 6 редактирования соединен с выходом формирователя 10 и вторым входом регистра 16, а второй вход подключен к первому выходу генератора 8 меток времени и первому входу формирователя 10, второй выход блока 6 соединен с первым входом генератора 8 меток времени, авторегулятор 7 входом подключен к выходу блока 3 сравнения, входу АЦП 11 и первому входу вычислителя 15, второй выход генератора 8 меток времени подключен к вто
рому входу вычислителя 15, амплитуд- ньш селектор 9 выходом подключен к второму входу формирователя 10, АЦП 11 выходом подключен к входу коррелятора 13, триггер 12 выходом подключен к второму входу генератора 8 меток времени,- блок 14 сравнения первым входом соединен с выходом коррелятора 13, а выходом - с входом триггера 12, вычислитель 15 третьим входом подключен к третьему выходу генератора 8 меток времени, выход регистра 16 соединен с вторым входом, блока 14 сравнения, выход вычислителя 15 является выходом устройства.
Устройство работает следующим об- разом.
Сигнал управления по скорости отклонения физической величины от требуемого значения (t) формируется следующим образом.
На основе подсчета сумм цен импульсов за время срабатьшания контактного датчика на интервале анализа Т определяется опытное значение физической величины и
W
on,
(t)I:W (t;-t;., ),(1)
где t,, - времена срабатывания контактного датчика - ранжированный ряд порядковых статистик времен положения импульсов
t,.i tj4c .«.t; ... t.
(2)
nporpahiMHoe значение физической величины определяется формулой: и
W
пр
(t,-) Z.W (t;-t,., ),
(3)
где tj и tj, - времена, соответствующие замыканиям (размыканиям) контактного датчика и - определяющиеся про-. граммой.
Отклонение физической величины от требуемого значения определяется соотношением:
(t; ) ,
(4)
&W; (t)Wo (t;)-Wnp
Скорость отклонения физической величины от требуемого значения определяется выражением:
3UK (t) ., . ,.-1
дЮиТк
при AK (t) 0,
где A К (t)- отклонение коэффициента
усиления датчика от номинального значения К„. Градиент grad W (йо; ) определяется выражением:
grad WOTK (ь ) Л К ()
bW (ьо)
(6)
oV.; (t),
генератором меток
UK (л-гр+к,.,
где (&e) I (&)ll ;
iC - интервалы времени максимального изменения W помеченные времени. В исходном состоянии сигналы с датчика 1 и генератора 4 программ не поступают. Функционирование устройства начинается в момент времени одновременного запуска генератора 4 программ и измерений датчиком 1 сигнала опытного значения физической величины.
Сигнал физической величины ) (фиг.26) с датчика 1 подается на вход дифференцирующей цепочки 5. После дифференцирования импульсы Uj(t) (фнг.2в) поступают на вход амплитудного селектора 9, который работает по принципу ограничителя сверху отрицательных импульсов. Амштитудньй селектор 9 преобразует входной сигнал в последовательность импульсов 13л (t)
тупает на первьи вход авторегул ра 7 и первый вход вычислителя. торегулятор управляет коэффицие
(фиг.2г), формирователь 10 осуществляет формирование импульсов Ue(t). /, о ч - « 40усиления датчика-интегратора 1. (фиг.2д) необходимой амплитуды и дли- „„„„„ i „.„,
тельности для работы блока 6 редактирования.
В качестве блока 6 редактирования может быть использована схема импульсВычислитель 15 рассчитьтает рость отклонения физической ве ны от требуемого значения по ф муле:
45
ной системы фазовой автоподстройки частоты.
Блок 6 редактирования осуществля-. ет управление фазой импульсной последовательности посредством изменения частоты управляемого генератора. Редактирование выполняется в двух режимах: исключение лишних и восстановление недостающих импульсов (t)3. Блок 6 редактирования формирует из серии импульсов на сбойных участках последовательность импульсов, адекватно отражающую изме
0535
нения физической величины с точностью срабатывания датчик:а.
Происходит редактирование импульс- 5 ной последовательности U (t) (фиг.25), йреобразованной в ) (фиг.2д) на сбойных участках. Это обеспечивает ранжировку и исключение аномальных измерений порядковых статистик вари- 10 ационного ряда генеральной совокупности выборочных значений времен срабатывания датчика на интервале расчета.
Блок 6 редактирования осуществля- 15 ет восстановление сигнала U (t) (фиг.2б) на участках сбоя и исключение лишних импульсов срабатывания контактного .датчика. Это обеспечивает вариационную последовательность
20 импульсов Ug(t) (фиг.2е).
Ждущий мультивибратор 2 запускается этими импульсами, а на его выходе формируется последовательность импульсов U(t) (фиг.2ж). Эти им25 пульсы совпадают по фазе с напряжением опытного значения физической величины U2(t) (фиг.26) . С выхода мультивибратора 2 сигнал U-, (t) (фиг.2к) поступает на первый вход блока 3 сравнения
30 На его второй вход с генератора 4 программ поступают импульсы програм- Много значения физической величины и, (t) фиг.2а).
Блок 3 сравнения вырабатывает сиг35 нал ошибки по фазе в виде напряжения Ug (ut) (фиг.2з). Это напряжение поступает на первьи вход авторегулятора 7 и первый вход вычислителя. Авторегулятор управляет коэффициентом
. усиления датчика-интегратора 1. „„„„„ i „.„,
. усиления датчика-интегратора 1. „„„„„ i „.„,
Вычислитель 15 рассчитьтает скорость отклонения физической величины от требуемого значения по фор муле:
W«
(t) K(t)
д1дУ)+к„
uW-(t)
при д K(t) О,
(7)
0
5
AW;(t)Wop-w«p.(t)
H
где л К (t) - отклонение коэффициента усиления датчика от номинального значения KI (t) - отклонение опытного значения физической величины от требуемого (программного) значения.
Участок редактирования информации на интервал расчета скоростиWQ K (t) помечается импульсами с генератора 8 меток времени (напряжение Ua (t)) (фиг.2и), управляемого с выхода блока 6 редактирования. Это необходимо : для распознавания восстановленных i импульсов, а следовательно, и рассчи- тайных значений .- (t) при редак- : тировании импульсной последователь- ности ).
; На вход АЦП 11 с выхода блока 3 сравнения поступает сигнал, пропорциональный разности между опытным и программным (требуемым) значением физической величины. С выхода АЦП 11 сигнал в цифровом виде поступает на вход коррелятора 13. Корреляционная функция чувствительна к изменению величины orv., t), особенно в
блок сравнения, авторегулятор, генератор программ, генератор меток времени, вычислитель, дифференцирующую цепь, амплитудный селектор, формиро-. ватель импульсов, блок редактирования, ждущий мультивибратор, причем датчик-интегратор вторым входом подключен к выходу авторегулятора, кото1Q рый входом соединен с выходом первого блока сргшнения и первым входом вычислителя, первьй вход первого блока срсшнения соединен с первым выходом генератора программ, второй вход
15 вычислителя соединен с первым выходом генератора меток времени, выход датчика-интегратора подключен к последовательно соединенным дифференцирующей цепи, амплитудному селекто2Q ру, формирователю импульсов, выход которого соединен с первым входом блока редактирования, второй вход которого подключен к второму выходу генератора меток времени и второму
25 входу формирователя, блок редактирования первым выходом соединен с первым входом генератора меток времени, второй выход блока редактирования соединен с входом ждущего мульi моменты времени, где WOTH; (t) дости гает максимального значения, т.е.
5 градиента.
Блок 14 сравнения сравнивает зна чение корреляционной функции (t)J с заданным f д (btXl| ,
; которое записано в регистр 16 с генератора -4 программ. На интервалах
UU: времени (tX) | дд (t)l , .JQ тивибратора, выход которого подключен что соответствует значительному из-к второму входу первого блока сравмене нию grad Увтщ (t).нения, выход вычислителя является
Блок 14 сравнения вырабатывает им- выходом устройства, о тл ич аю- йульсы и ,0 (t) (фиг.2к), которые посту- щ е е с я тем, что, с целью расшипают на вход триггера 12. Триггер 12 рения функциональных возможностей
является Т-триггером. импульс с выхода триггера 12 управляет генератором 8 меток времени, С второго выхода генератора 8 меток времени на вход вычислителя 15 поступают времена t; (и„ (t)) (фиг.2л), которые помечают
35
40
изменения (t) как величину grad W. (btj ),
Вычислитель 15 рассчитывает скорость отклонения физической величины от требуемого значения (t), но с признаком времен tj, что означает определение grad (t) по формуле (7), а скорости W. (t) по формуле (6).
45
50
за счет определения интервалов времени с градиентом отклонения от заданной величины, превьшающим заданные значения при одновременном определении этого отклонения, в него введены аналого-цифровой преобразователь, коррелятор, второй блок сравнения, регистр, триггер, причем выход первого блока сравнения соединен с входом аналого-цифрового преобразователя, выход которого соединен с входом коррелятора, выход которого соединен с первым входом второго блок& сравнения, второй вход которого подключен к выходу регистра, первым входом соединенного с выходом формирователя, а вторым входом - с выходом генератора программ, триггер входом подключен к выходу второго блока сравнения, а выходом - к второму входу генератора меток времени, которьш вторым выходом соединен с третьим входом вычислителя.
Формула изобретения
Устройство для определения скорости отклонения физической ве.личкны от требуемого значения, содержащее дат- чик Ш1тегратор, первый вход которого является входом устройства, первый
блок сравнения, авторегулятор, генератор программ, генератор меток времени, вычислитель, дифференцирующую цепь, амплитудный селектор, формиро-. ватель импульсов, блок редактирования, ждущий мультивибратор, причем датчик-интегратор вторым входом подключен к выходу авторегулятора, который входом соединен с выходом первого блока сргшнения и первым входом вычислителя, первьй вход первого блока срсшнения соединен с первым выходом генератора программ, второй вход
вычислителя соединен с первым выходом генератора меток времени, выход датчика-интегратора подключен к последовательно соединенным дифференцирующей цепи, амплитудному селектору, формирователю импульсов, выход которого соединен с первым входом блока редактирования, второй вход которого подключен к второму выходу генератора меток времени и второму
входу формирователя, блок редактирования первым выходом соединен с первым входом генератора меток времени, второй выход блока редактирования соединен с входом ждущего муль тивибратора, выход которого подключен к второму входу первого блока срав рения функциональных возможностей
35
40
45
50
55
за счет определения интервалов времени с градиентом отклонения от заданной величины, превьшающим заданны значения при одновременном определении этого отклонения, в него введены аналого-цифровой преобразователь, коррелятор, второй блок сравнения, регистр, триггер, причем выход первого блока сравнения соединен с входом аналого-цифрового преобразователя, выход которого соединен с входом коррелятора, выход которого соединен с первым входом второго блок& сравнения, второй вход которого подключен к выходу регистра, первым входом соединенного с выходом формирователя, а вторым входом - с выходом генератора программ, триггер входом подключен к выходу второго блока сравнения, а выходом - к второму входу генератора меток времени, которьш вторым выходом соединен с третьим входом вычислителя.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скорости отклонения физической величины от требуемого значения | 1980 |
|
SU972410A1 |
| Устройство для определения скорости отклонения физической величины от требуемого значения | 1986 |
|
SU1508171A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1988 |
|
SU1733946A1 |
| ВОЗБУДИТЕЛЬ РАДИОПРИЕМНИКА | 1990 |
|
RU2119250C1 |
| Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2721992C1 |
| Электронно-счетный частотомер | 1981 |
|
SU1041947A1 |
| Устройство для измерения корреляционногоОТНОшЕНия дВуХ СлучАйНыХ пРОцЕССОВ | 1979 |
|
SU851420A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |