1
(2) 4078174/24-10 (22) 19.05.86 (46) 15.09.89. Бкш. № 34 (72) П.И.Кныш, В.А.Мельников и Б.Д.Володин (53) 621.317.39:541.7()
(56)Авторское свидетельство СССР № 972410, кл. G 01 Р 15/00, 1982.
Авторское свидетельство СССР № 1164606, кл. G 01 Р 15/00, 1983.
(54) УСТРОЙСТВО ЛуЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТКЛОНЕНИЯ ФИ31-1ЧЕСКОЙ ВЕЛИЧИНЫ ОТ ТРЕБ -ЕМОГО ЗЕАЧЕВт
(57)Изобретение относится к устройствам для определения скорости отклонения физической величины от программного значения Целью изобретения является повьшение точности и устойчивости работы устройства в условиях
воздействия виброударных нагрузок. Сущность изобретения заключается в том, что на основе дискриминации сигнала производной отклонения физической величины от требуемого (программного) значения (t)/dt по отношению к эталонным импульсам управляемого генератора путем фазирования осуществляется стабилизация мгновенной скорости двигателя генератора программ на нормальном и сбойном интервалах анализа измерительной информации опытного значения физической величины - скорости Wofij (t). Это достигается в двух контурах самонастройки, в которых отрабатываются сигналы рассогласования, что позволяет во время функционирования устройства без методической погрешности определять (t). 2 ил.
S

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скорости отклонения физической величины от требуемого значения | 1986 |
|
SU1420535A1 |
| Устройство для определения скорости отклонения физической величины от требуемого значения | 1980 |
|
SU972410A1 |
| Устройство дл прогнозирования неисправностей радиоэлектронной аппаратуры | 1978 |
|
SU742958A1 |
| Устройство для управления аэрофотоаппаратом | 1991 |
|
SU1838757A3 |
| Устройство для моделирования радиоприемника | 1981 |
|
SU1012283A1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| Устройство для моделирования излучений гетеродина приемника | 1981 |
|
SU972525A1 |
| Устройство для контроля электропитания ЦВМ | 1984 |
|
SU1167611A1 |
| Устройство для передачи телеметрической информации | 1988 |
|
SU1575219A2 |
Изобретение относится к устройствам для определения скорости отклонения физической величины от программного значения. Целью изобретения является повышение точности и устойчивости работы устройства в условиях воздействия виброударных нагрузок. Сущность изобретения заключается в том, что на основе дискриминации сигнала производной отклонения физической величины от требуемого /программного/ значения DΔWI(T)/DT по отношению к эталонным импульсам управляемого генератора путем фазирования осуществляется стабилизация мгновенной скорости двигателя генератора программ на нормальном и сбойном интервалах анализа измерительной информации опытного значения физической величины - скорости WопI(T) . Это достигается в двух контурах самонастройки, в которых отрабатываются сигналы рассогласования, что позволяет во время функционирования устройства без методической погрешности определить W откI(T) . 2 ил.
Изобретение относится к устройствам для определения скорости отклонения физической величины от требуемого программного значения по данным расчетных параметров дискретных систем управления и обработки результатов измерения.
Цель изобретения - повьшение точности определения скорости отклонения физической величины от требуемого значения по данным расчетных параметров и устойчивости работы устройства путем фазировки сигналом производной отклонения физической величины от требуемого (программного) значения мгновенной скорости двигателя генератора программ на нормальном сбойном
участке анализа измерительной информации опытного значения физической величины.
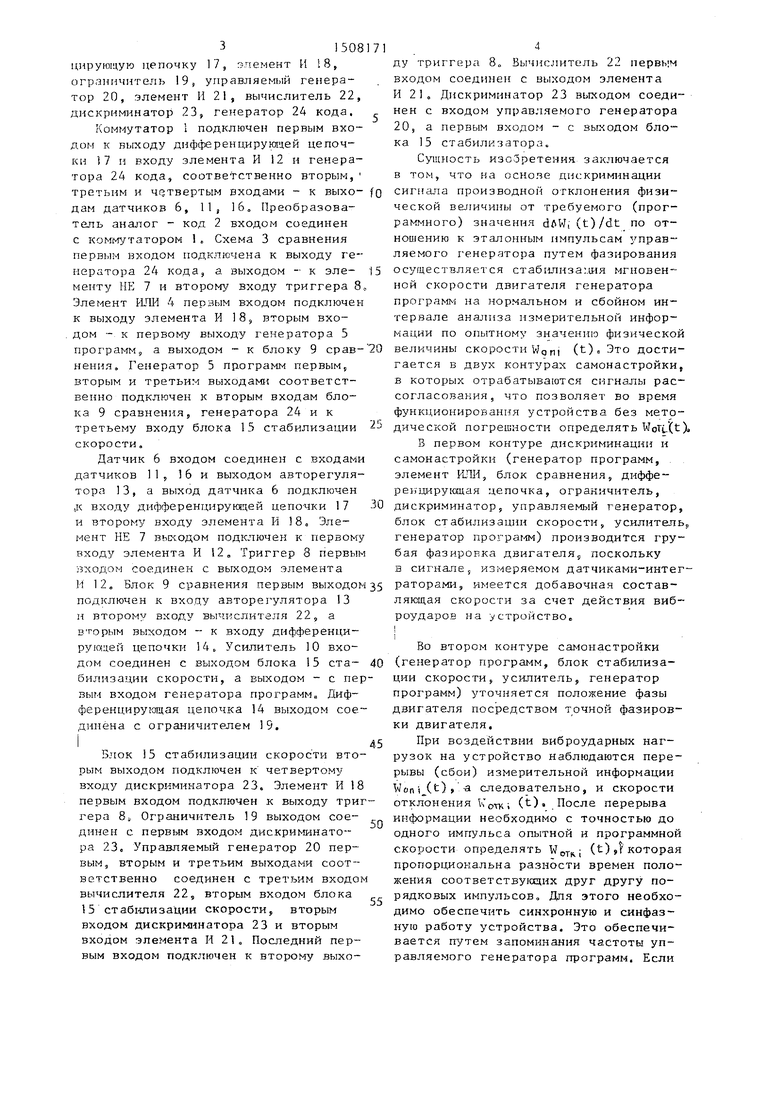
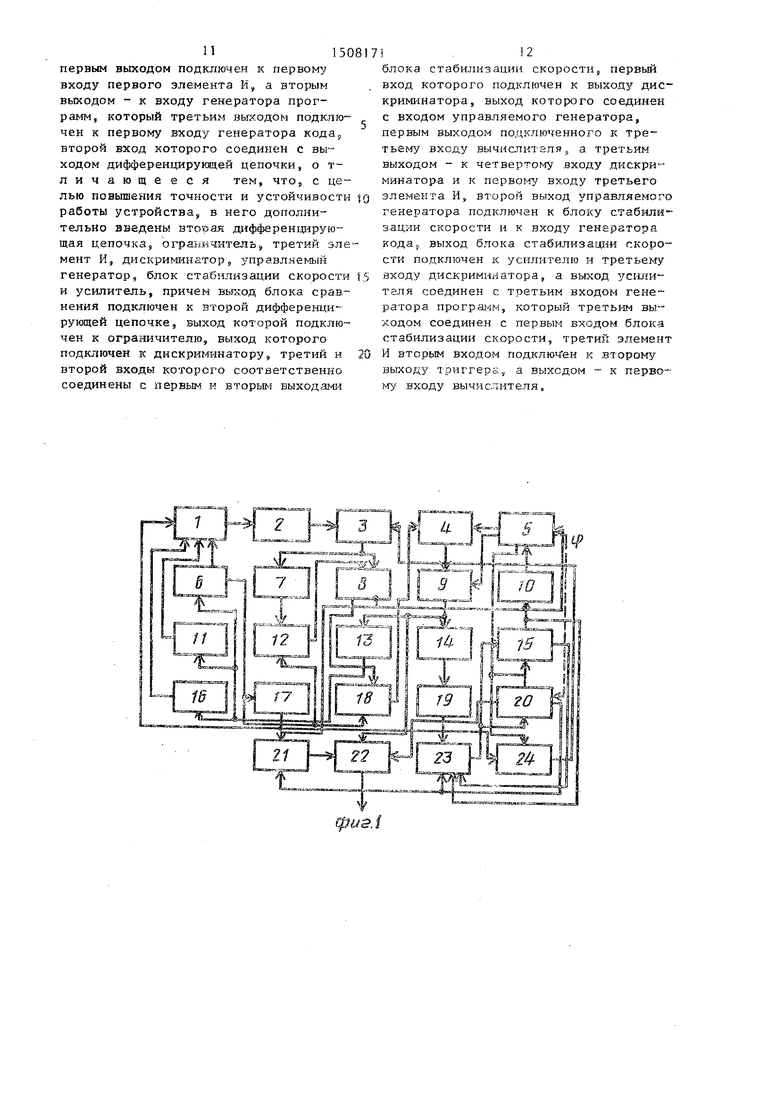
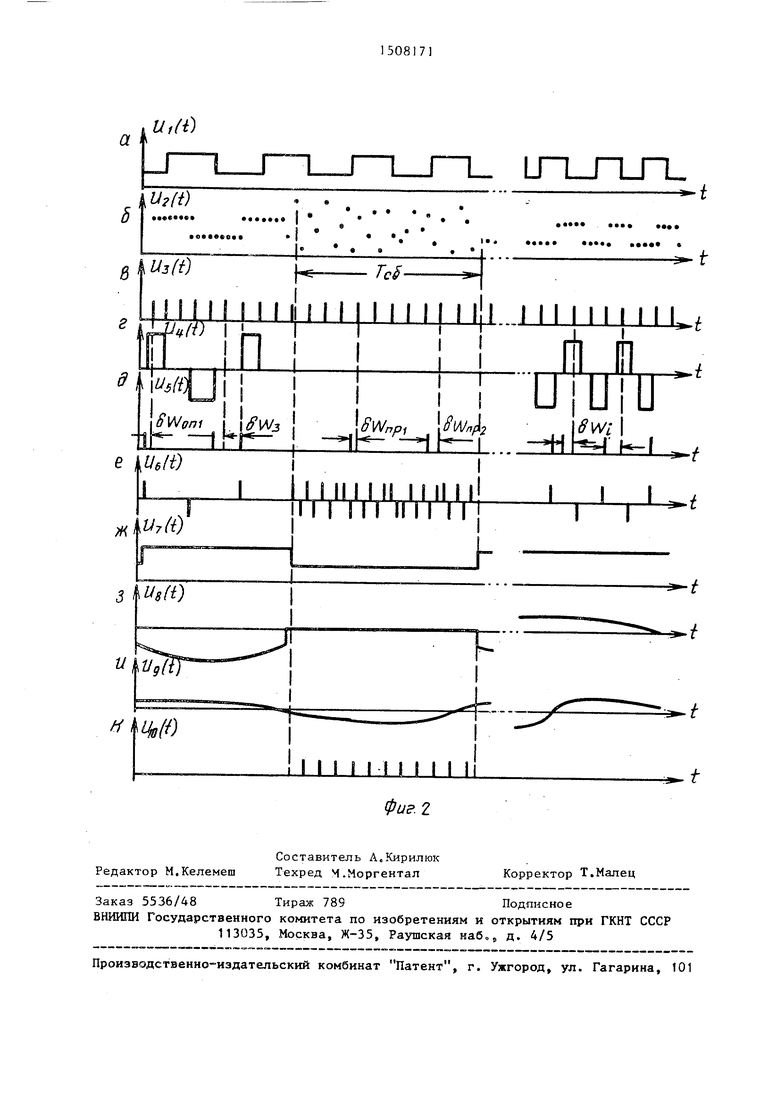
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - временные диаграммы, поясняющие его работу.
Устройство для определения скорости отклонения физической величины от требуемого значения (фиг, 1) содержит коммутатор 1, преобразователь аналог - код 2, схему 3 сравнения, элемент ИЛИ 4, генератор 5 программ, датчик 6, элемент НЕ 7, триггер 8, блок 9 сравнения, усилитель 10, датчик II, элемент И 12, авторегулятор 13, дифферен- циру ощуго цепочку 14, блок 15 стабилизации скорости, датчик 16, дифференСП
31508
пирующую цепочку 17, элемент И 18, ограничитель 19, управляемый генератор 20, элемент И 21, вычислитель 22, дискримннатор 23, генератор 24 кода.
Коммутатор 1 подключен первь М входом к выходу дифференцирукл дей цепочки 17 и входу элемента И 12 и генератора 24 кода, соответственно вторым, третьим и четвертым входами - к выхо- дам датчиков 6, 11, 16, Преобразователь аналог - код 2 входом соединен с коммутатором 1. Схема 3 сравнения первым входом подключена к выходу генератора 24 кода, а выходом - к эле- менту НЕ 7 и второму входу триггера 8 Элемент 1-ШИ 4 первым входом подключен к выходу элемента И 18, вторым входом - к первому выходу генератора 5 программ, а выходом - к блоку 9 сравнения. Генератор 5 программ первым, вторым и третьим выходами соответственно подключен к вторым входам блока 9 сравнения, генератора 24 и к третьему входу блока 15 стабилизации скорости.
Датчик 6 входом соединен с входами датчиков 115 16 и выходом авторегулятора 13, а выход датчика 6 подключен .к входу дифференцирукицей цепочки 1 7 и второму входу элемента И 18 Элемент НЕ 7 вькодом подключен к первому входу элемента И 12„ Триггер 8 первым }зходом соединен с выходом элемента М 12,, Блок 9 сравнения первым выходом подключен к входу авторегулятора 3 и второму входу вычислителя 22, а вторым выходом -- к входу дифференци- руюдей цепочки 14„ Усилитель 10 входом соединен с выходом блока 15 ста- билизации скорости, а выходом - с первым входом генератора программ Диф- ференциругощая цепочка 14 выходом соединена с ограничителем 19.
I
Блок 15 стабилизации скорости вторым выходом подключен к четвертому входу дискриминатора 23. Элемент И 18 первым входом подключен к выходу триггера 8i, Ограничитель 19 выходом соединен с первым входом дискриминатора 23, Управляемый генератор 20 первым, вторым и третьим выходами соответственно соединен с третьим входом вычислителя 22, вторым входом блока 15 стаб1-шизации скорости, вторым входом дискриминатора 23 и вторым входом элемента И 21„ Последний первым входом подключен к второму выхо
0 j
0 5 0
5
0
5
ду триггера 8„ Вычислитель 22 первь;н входом соед11нен с выходом элемента И 21. Дискриминатор 23 выходом соединен с входом управляемого генератора 20, а первым входом - с выходом блока 15 стабилизатора.
Сущность изобретения заключается в том, что на основе дискриминации сигнала производной отклонения физической величины от требуемого (программного) значения dAW; (t)/dt по отношению к эталонным импульсам управляемого генератора путем фазирования осуществляется стабилизация мгновенной скорости двигателя генератора програмь-i на нормальном и сбойном интервале анализа измерительной информации по опытному значению физической величины скорости VJqni (t) . Это достигается в двух контурах самонастройки, в которых отрабатываются сигналы рассогласования, что позволяет во время функционирования устройства без методической погрешности определять WoTi.(tX
В первом контуре дискриминации и самонастройки (генератор программ, . элемент ИЛИ, блок сравнения, диффе- рекцируюцая цепочка, ограничитель, дискриминатор, управляемый генератор, блок стабилизации скорости, усилитель,, генератор програг м) производится грубая фазировка двигателя, поскоотьку в сигна-пв, измеряемом датчиками-интеграторами, имеется добавочная составляющая скорости за счет действия виб-
роударов на устройство
I
Во втором контуре самонастройки (генератор программ, блок стабилизации скорости, усилитель, генератор программ) уточняется положение фазы двигателя посредством точной фазиров- ки двигателя.
При воздействии виброударных нагрузок на устройство наблюдаются перерывы (сбои) измерительной информации Woni (t) , -а следовательно, и скорости отклонения WOTKI (t) После перерыва информации необходимо с точностью до одного импульса опытной и программной скорости определять (t),| которая пропорциональна разности времен положения соответствующих друг другу порядковых импульсов Для этого необходимо обеспечить синхронную и синфазную работу устройства. Это обеспечивается путем запоминания частоты уп- равляе.мого генератора программ. Если
515
под влиянием возмущений фаза ротора двигателя генератора программ изменися, то последовательность программны импульсов сдвинется относительно эта лонных импульсов, поступающих на первый вход дискриминатора с управляемого генератора. Вследствие этого изменится положение импульсов производной отклонения физической величины от требуемого значения, а следовательно и напря.;ение на выходе :дискриминатораJ которое подано на вход блока стабилизации скорости. При этом фаза питающего напряжения с блока стабилизации скорости питающего двигатель генератора, программы, изменится так, чтобы скомпенсировать влияние возмущений,
Фазировка сигналом производной отклонения физической величины от программного значения по отношению к эталонным импульсам в процессе ана .лиза информации позволяет исключить методическую погрешность в определении скорости отклонения FoTui (t)
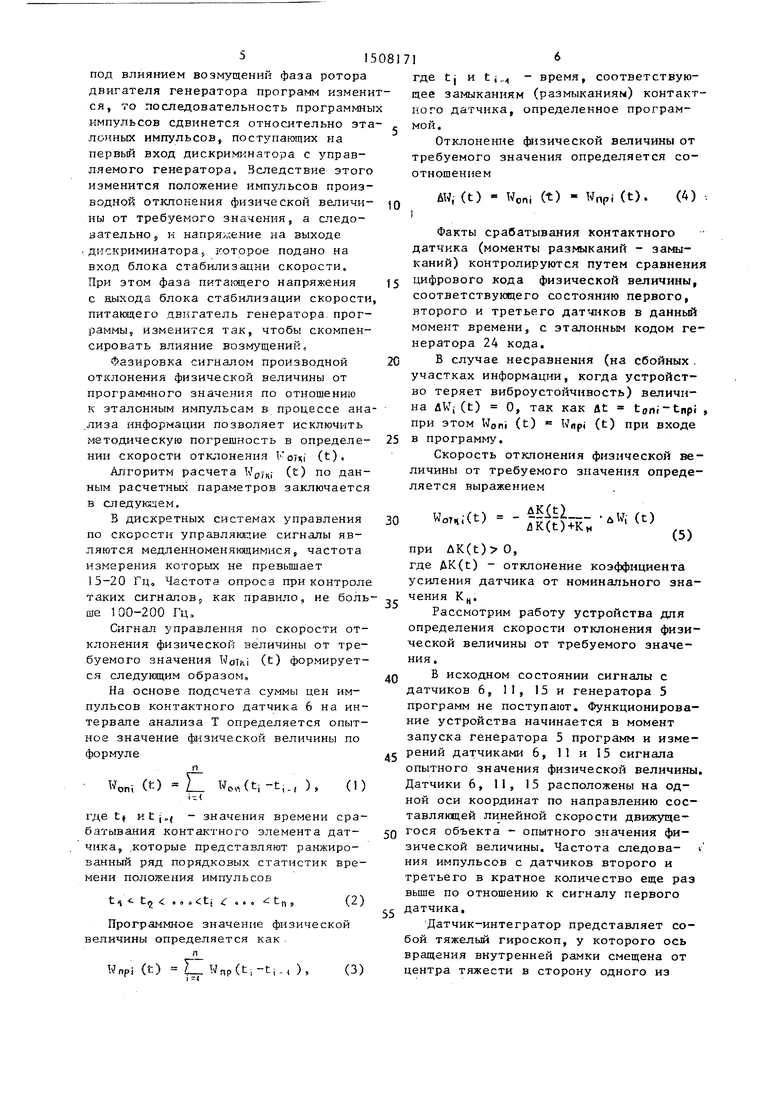
Алгоритм расчета (t) по данным расчетных параметров заключается в следующем.
В дискретных системах управления по скорости управлягапие сигналы являются медленноменяющимися, частота измерения которых не превышает 15-20 Гц, Частота опроса при контроле таких сигналов, как правило, не боль ше 100-200 Гц,
Сигнал управления по скорости отклонения физической величины от требуемого значения WOTK. (t) формируется следунщим образом,
На основе подсчета суммы цен импульсов контактного датчика 6 на интервале анализа Т определяется опытное значение физической величины по формуле
w
Г(
oni (fc) с Wo«(ti-t,., ),
(1)
где t Ht j.{ - значения времени срабатывания контактного элемента датчика, .которые представляют ранжированный ряд порядковых статистик времени положения импульсов
t i t
,tj
t,
(2)
Програм шое значение физической величины определяется как.
п
Wnpi (t) L- Wr,p(t-, -t;., ), (3)
0
5
0
,
5
716
где tj и ti.;, - время, соответствующее замыканиям (размыканиям) контактного датчика, определенное программой.
Отклонение физической величины от требуемого значения определяется соотношением
№, (t) Woni (t) - Wnpi (t), (A)
I
Факты срабатывания контактного датчика (моменты размыканий - замыканий) контролируются путем сравнения цифрового кода физической величины, соответствующего состоянию первого, второго и третьего датчиков в данный момент времени, с эталонным кодом генератора 24 кода.
В случае несравнения (на сбойных . участках информации, когда устройство теряет виброустойчивость) величина flW; (t) о, так как , при этом Woni (t) Wnpi (t) при входе в програмьгу.
Скорость отклонения физической величины от требуемого значения определяется выражением
0
0
5
0
5
-- -.-ШЫ;
(5)
при uK(t) О,
где AK{t) - отклонение коэффициента усиления датчика от номинального значения К,,.
Рассмотрим работу устройства для определения скорости отклонения физической величины от требуемого значения,
В исходном состоянии сигналы с датчиков 6, П, 15 и генератора 5 программ не поступают. Функционирование устройства начинается в момент запуска генератора 5 программ и измерений датчиками 6, 11 и 15 сигнала опытного значения физической величины. Датчики 6, 11, 15 расположены на одной оси координат по направлению сос- тавлянщей линейной скорости движущегося объекта - опытного значения физической величины. Частота следова- ния импульсов с датчиков второго и третьего в кратное количество еще раз выше по отношению к сигналу первого датчика.
Датчик-интегратор представляет собой тяжелый гироскоп, у которого ось вращения внутренней рамки смещена от центра тяжести в сторону одного из
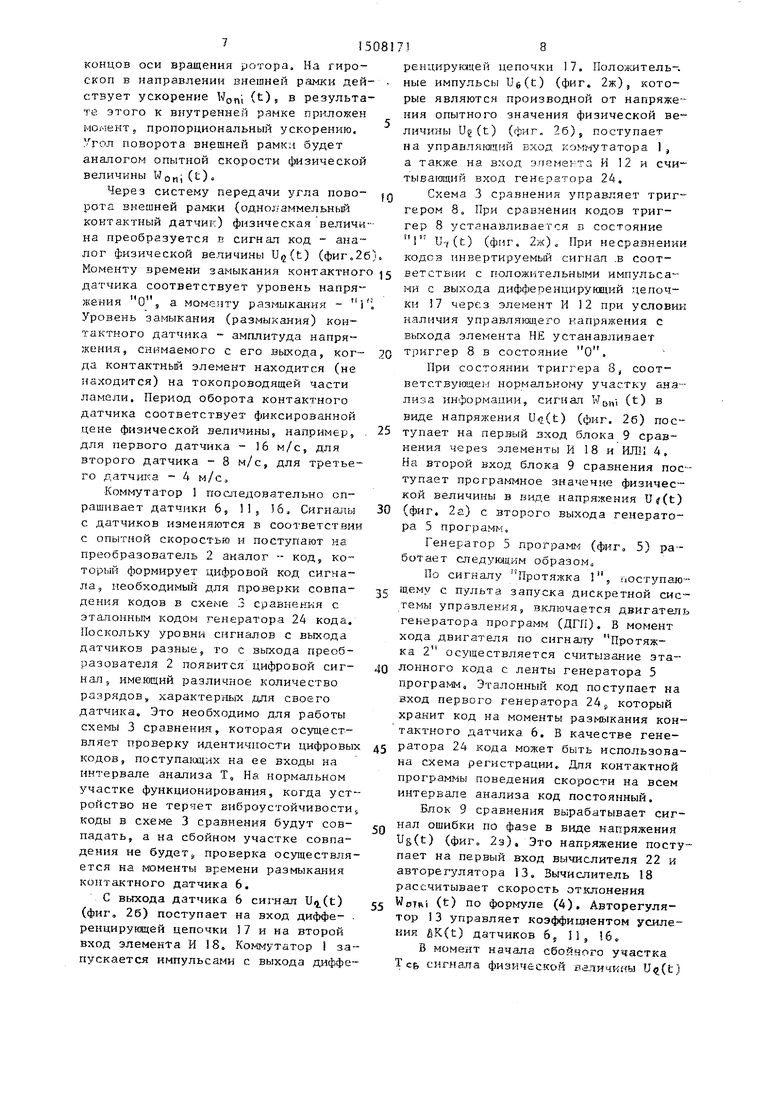
концов оси вращения ротора. На гироскоп в направлении внешней рамки действует ускорение (t), в результате этого к внутренней рамке приложен момент 5 пропорциональный ускорению. Угол поворота внешней рамки будет аналогом опытной скорости физической величины Wo,j(t)o
Через систему передачи угла поворота внешней рамки (одноламмельньм контактный датчик) физическая величина преобразуется в сигнал код - аналог физической величины ) (фиг.2 Моменту времени замыкания контактног датчика соответствует уровень напряжения о, а моменту pasMLiKaiiHH - i Уровень замыкания (размыкания) контактного датчика - амплитуда напряжения, снимаемого с его выхода, ког- да контактный элемент находится (не находится) на токопроводящей части ламели. Период оборота контактного датчика соответствует фиксированной цене физической величины, например, для первого датчика - 6 м/с, для второго датчика - 8 м/с, для третьего датчика - 4 м/с.
Коммутатор 1 последовательно опрашивает датчики 6, 115 16, Сигншты с датчиков изменяются в соответствии с опытной скоростью и поступают на преобразователь 2 аналог - код, который формирует цифровой код сигнала, необходимый для проверки совпа- дения кодов в схеме 3 сравнения с эталонным кодом генератора 24 кода. Поскольку уровни сигналов с выхода датчиков разные, то с выхода преобразователя 2 появится цифровой сиг- нал, имеющий различное количество разрядов, характерных для своего датчика. Это необходимо для работы схемы 3 сравнения, которая осуществляет проверку идентичности цифровых кодов, поступаюдих на ее входы на интервале анализа Т На нормальном участке функционирования, когда устройство не теряет виброустойчивостиs коды в схеме 3 сравнения будут совпадать, а на сбойном участке совпадения не будетJ, проверка осуществляется на foмeнты времени размыкания контактного датчика 6.
С выхода датчика 6 сигнал Un(t) (фиг, 2б) поступает на вход диффе- ренцирувщей цепочки 17 и на второй вход элемента И 18, Коммутатор 1 запускается импульсами с выхода диффе
10
. 5 20 25
ренциругадей цепочки 17. Положитель-. ные импульсы U6(t) (фиг. 2ж), которые являются производной от напряже- ния опытного значения физической величины Ug(t) (фиг. 26), поступает на управляющий вход комн-утатора 1 , а также на вход элемента И 12 и считывающий вход генератора 24,
Схема 3 сравнения управляет триггером 8о При сравнении кодов триггер 8 устанавливается в состояние
U-j(t) (фиг. 2ж). При несравнении кодоз инвертируемый сигнап .в соответствии с положительными импульсами с выхода дифференцирующий цепочки 17 через элемент И 12 при условии наличия управлягацего напряжения с выхода элемента НЕ устанавливает триггер 8 в состояние О.
При состоянии триггера Sj соот- ветствуюдем нормальному участку анализа информации, сигнал W(j,,-, (t) в виде напряжения (t) (фиг. 2б) поступает на первый вход блока 9 сравнения через элементы И 18 и ШБ 4, На второй вход блока 9 сравнения поступает программное значение физической величины в виде напряжения U(t) (фиг, 2а) с второго выхода генератора 5 программ.
Генератор 5 програм1 (фиг, 5) работает следугадим образом.
По сигналу Протяжка , поступающему с пульта запуска дискретной системы управления, включается двигатель генератора программ (ДГП). В момент хода двигателя по сигналту Протяжка 2 осуществляется считывание эталонного кода с ленты генератора 5 nporpah M, Эталонный код поступает на
вход первого генератора 24;, который хранит код на моменты размыкания контактного датчика 6, В качестве генератора 24 кода может быть использована схема регистрации. Для контактной программы поведения скорости на всем интервале анализа код постоянный.
Блок 9 сравнения вырабатывает сигнал ошибки по фазе в виде напряжения Us(t) (фиг 2з). Это напряжение поступает на первый вход вычислителя 22 и авторегулятора 13, Вычислитель 18 рассчитывает скорость отклонения WoTRi (t) по формуле (4), Авторегулятор 13 управляет коэффициентом усиле- кик iK(t) датчиков в, П, 16.
В момент начала сбойного участка Тсь сигнала физической величины U(t)
915
(фиг. 2б) триггер 8 устанавливается в состояние О. Сигналом с нулевого выхода триггера 8 осуществляется управление генератором 5 программ. На интервале ТСБ с первого выхода генератора 5 программ на второй вход элемента ИЛИ 4 поступает напряжение Ui(t) (фиг, 2а). Вместо напряжения сигнала физической величины Uj(t) (фиг. 2б) на блок 9 сравнения поступает программное значение сигнала U« (t) (фиг. 2а), На выходе блока 8 сравнения напряжение Uj,(t) (фиг. 2з) будет равно нулю, так как fit tonj-tnpi О, Измеряемый коэффициент ус - ления AK(t) 0, а скорость отклонения физической величины от требуемого значения, определенная вычислителем 22, Wo(-nj (t)0s так как AWj (t)0. Упpaвляe Ьiй генера- тор 20 формирует признаки Uio (t) (фиг. 2к), которые в виде импульсов поступают на третий вход вычислителя и свидетельствуют о наличии сбойных участков информации.
Сигнал рассогласования между опытной скоростью Wohi (t) и программной скоростью Wnei (t) в виде напряжения (t) (фиг. 2г) поступает на выходы
блока 9 сравнения, в виде двух поляр- ных импульсов - на вход дифференцирующей цепочки 14, Дифференцирующая цепочка 14 вырабатывает импульсы U5(t) (фиг. 2д), которые после ограничения в ограничителе 9 поступают в виде однополярных импульсов U5(t) (фиг.2д) на выход дискриминатора 23. На второй вход дискриминатора 23 с выхода управляемого генератора 20 поступают импульсы Uo,(t) (фиг, 2в). Дискримина- тор 23 осуществляет сравнение времен положения импульсов Va,(t) (фиг. 2в) и Ug(t) (фиг, 2д) и выдает информацию на управляемый генератор 20.
Перед установкой устройства на объект движения осуществляется калибровка по опытному и программному значениям скорости таким образом, чтобы фронты импульсов Woni (t) и программного значения Wf,; (t) совпадали при размыканиях с импульсами управляемого генератора 20. Программная функция скорости на ленте воспроизводит дискретные значения аналога скорости, фактически выборочные значения, которые представлены дискретной импульсной последовательностью U)(t) (фиг.2а)
7110
Аналогично аппроксимирована опытная функция скорости Woni (t),
Поскольку ускорение движ ьвго объекта на коротких интервалах времени постоянно, а опытная скорость Wofjl (t) изменяется линейно, то рассогласования по времени между импульсами U5(t) (фиг. 2д) и )H (фиг.2в будут за счет нелинейностей - погрешностей, возникших под действием виб- роударных нагрузок
Формула изобретения
Устройство для опреде/генкя скорости отклонения физической величины от требуемого значения, содержащее первый датчик-интегратор, триггер, блок сравнения, авторегулятор, вычислитель, генератор программ, коммутатор, преобразователь аналог - код, элементы 1-ШИ и НЕ, схему сравнения, генератор кода, второй и третий датчики-интеграторы, первый и второй эле менты И, дифференцирующую цепочку, причем входы датчиков-интеграторов подключены к выходу авторегулятора, который входом соединен с выходом блока сравнения, второй вход которого соединен с вторым выходом генератора программ, а выход - с вторым входом вычислителя, триггер первым входом соединен с выходом второго элемента И а вторым входом подключен к выходу схемы сравнения и входу элемента НЕ, соединенного с входом второго элемента И, элемент Ш1И первым входом под- 1слючен к выходу первого элемента И, а вторым входом соединен с первым выходом генератора программ, а выходом - с первым входом блока сравнения, коммутатор первым входом подключен к выходу дифференцирующей цепочки , вход которой - второй вьосод первого датчика-интегратора подключен к второму входу первого элемента И, четвертый, третий, второй входы коммутатора соответственно соединены с вькодами первого, второго и третьего датчиков-интеграторов, выход коммутатора соединен с входом преобразователя аналог - код, выходом подключенного к первому входу схемы сравнения, второй вход которой соединен с выходом генератора кода, второй вход второго элемента И соединен с выходом дифференцирующей цепочки, триггер
П150
первым выходом подключен к первому входу первого элемента И, а вторым выходом - к входу генератора программ, который третьим выходом подключен к первому входу генератора кода, второй вход которого соединен с выходом дифференцирукнцей цепочки, о т- личающееся тем, что, с целью повышения точности и устойчивости работы устройства, в него дополнительно введены вторая дифференцирующая цепочкаJ ограничитель, третий зле мент И, дискриминатор5 управляемь Й генератор, блок стабилизации скорости и усилитель, причем нькод блока сравнения подключен к второй дифференцирующей цепочке, выход которой подключен к ограничителю, выход которого подключен к дискриминатору, третий и второй входы которог о соответственно соединены с первым н вторьп выходами
блока стабилизации скорости, первый вход которого подключен к выхощ дискриминатора, выход которого соединен с входом управляемого генератора,
первым выходом подключенного к третьему входу вычислителя, а третьим выходом - к четвертому входу дискриминатора и к первому входу третьего элемента И, второй выход управляемого генератора подключен к блоку стабилизации скорости и к входу генератора кодаа выход блока стабилизации скорости подключен к усилителю и третьему входу дискриминатора, а выход усгши- теля соединен с третьим входом генератора nporpai-iM, который третьим выходом соединен с первым входом блока стабилизации скорости, третий элемент И вторым входом подключ ен к второму выходу ариггера;, а выходом - к первому входу вычислителяе
