(Л
положений выходного звена. Исполни- ;тельный механизм содержит основание подпружиненное к основанию ведущее звено 2, выходное звено 3, установленное с возможностью качания вокруг оси 4, двигатель 5. Исполнительный :Механизм снабжен по кр&йней мере од- ;ним дополнительным звеном 6 с приводом j связанным жестко с выходным зве- ,,ном 3„ Выходное 3 и дополнительное ;б звенья установлены с возможностью гкачания вокруг одной оси 4 с ведущим ;звеном 2 и подпружинены к нему. Приводы ведущего 2 и дополнительного 6 звеньев включают упорные рычаги с
закрепленными на них роликами 10. и 1 15 установленнь ми с возможностью возвратно-поступательного перемешения в направляющих пазах 12 и 13, причем пазы 12 и 13 выполнены на ведущем звене 2, Использование исполнительного механизма позволяет -расщирить технологические возможности за счет увеличения количества фиксированных положений выходного звена, исключить из конструкции устройства для упаковывания большее количество передаточных механизмов, что повышает надежность устройства и его долговечность 1 ил „
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| МАШИНА ДЛЯ НАМОТКИ РУЛОНОВ ИЗ ПРЕДВАРИТЕЛЬНО НАТЯНУТОЙ ПЛЕНКИ | 2014 |
|
RU2664293C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| СИЛОВОЙ ШЛАГБАУМ ДЛЯ ГАРАЖЕЙ | 1991 |
|
RU2025553C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
Изобретение относится к устройствам для упаковывания, а именно к приводным механизмам циклического действия, и предназначено, например, для выполнения технологических операций по формированию пакета и заделке его верха, а также может найти применение в машиностроении в промышленных роботах и манипуляторах. Целью изобретения является расширение технологических возможностей аа счет увеличения количества фиксированных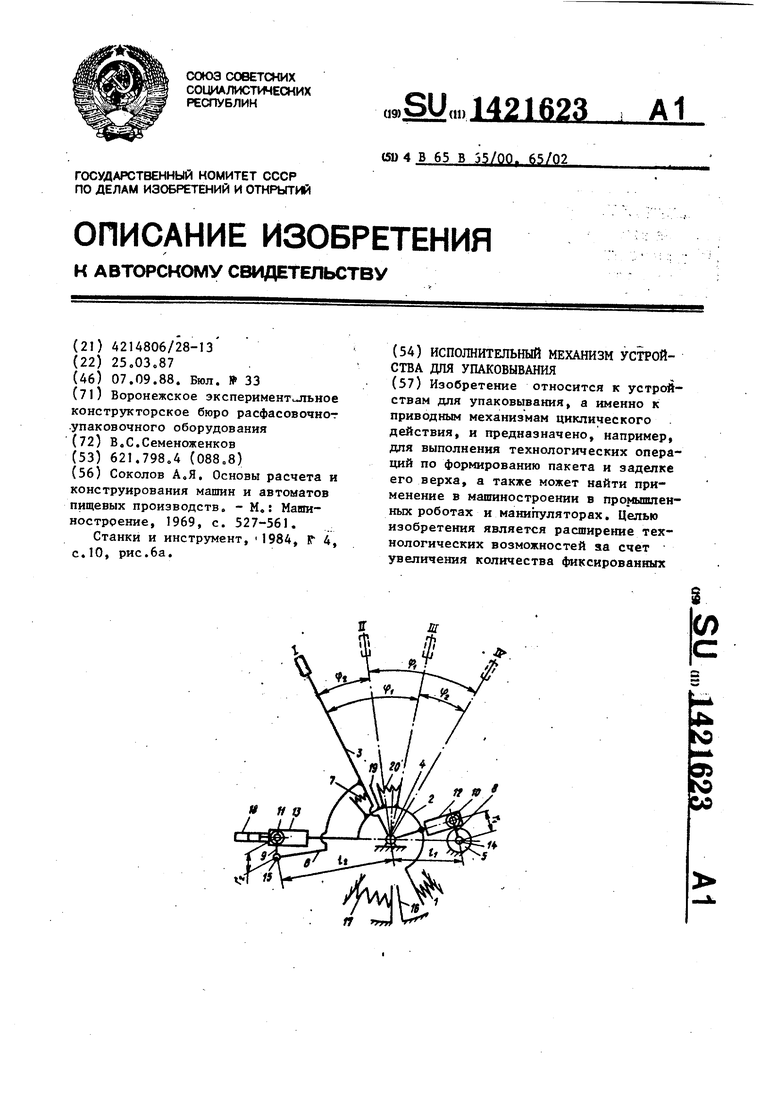
Изобретение относится к устройст- ам для упаковывания, а именно к приодным механизмам циклического деист - виЯд и предназначенод напримерg для выполнения технологических операций 5 по формированию пакета и заделке его верха 5 а также может найти применение в машиностроении в промышленных роботах и манипуляторах
Цель изобретения - расширение тех- нологических возможностей за счет ; увеличения количества фиксированных положений выходного звена, На чертеже представлена кинематическая схема исполнительного механизма
Исполнительный механизм устройства для упаковывания содержит основание (не показано)5 подпружиненное к основанию с помоп ью пружинь 1. ведущее звено 2з выходное звено 3, установленное с возможностью качания вокруг оси 4, двигатель 5 и снабжено дополнительным звеном 6 с приводом и свя- - занным жестко с выходным звеном 3, Выходное 3 и дополнительное 6 звенья установлены с зозможностью качания вокруг одной оси 4 и подпружинены к звену 2 пружиной 7 а приводы ведуще- Q го 2 и дополрштельного б звеньев включают, соответственно, их упорные рычаги 8 и 9 с закрепленны ш на них роликаьр 10 и 11 5 установленньп-ш с возможностью возвратно-поступательного перемещения в направляющих паIS
20
зах 12 и 13, причем пазы 12 и 13 для обоих роликов 10 и 11 выполнены на ведущем звене 2
Кроме того, приведены следующие обозначения: г - размер упорного рычага 3, у размер упорного рычага 9, 1. - расстояние между центром оси 4 и центром шарнира 14, 1 расстояние между центром оси 4 и центром щарнира 15, V/ - угол качания выходного звена 3, определяемый pw-iaroM 8 5 /2 - угол качания выходного звена 3, определяемый рычагом 9,
х IS и 2 arc sin
Q
2 arc sin , -i-z
0
Исполнительный механизм работает следующим образом
В исходном состоянии выходное звено 3 находится в крайнем, например, левом положении (позиция Ij, когда упругие элементы 1 и 7 сжаты, а упорные рычаги 8 и 9 сориентированы таким образом, что их оси перпендикулярны осям направляющих пазов 12 и 13 Для поворота выходного звена 3 на угол Yi и перемещения его в положение III включается двигатель 5, который перемещает ролик 10 по направляющему пазу 1 2 и выводит упорный рычаг 8 из мертвого положения о Упругий элемент 1 начинает разжиматься и разгоняет ведущее звено 2, а вместе с ним дополнительное звено 6 и выходное
звено 3. При этом потенциальная энергия упругого элемента 1 переходит в кинетическую энергию звеньев 2, 6 и 3 и дру гих деталей., вместе с ними перемещающихся Разгон подвижных звеньев заканчивается в тот момент, когда упругий элемент 1 достигает упора , 16 и далее движение продолжается по инерции„ При повороте выходного звена 3 на угол ролик 10 достигает своего крайнего положения в направляющем пазе, после чего он начинает перемещаться в обратном направлении. Движение звеньев 2, б и 3 по инерции прекращается в тот момент, когда звено 2 касается пружины 1 7 и начинает ее сжимать. В процессе сжатия пружины 17 происходит торможение подвижных звеньев и кинетическая энергия звеньев 2, 6 и 3 переходит в потенциальную энергию сжатия упругого элемента 17,
При подходе вьгходного звена 3 к положению III его скорость близка к
Формула изобретения
нулю и остановка происходит в тот момент, когда упорный рычаг 8 занимает свое второе мертвое положение. Исполнительный механизм устройст- при котором его ось перпендикулярна 30 ва для упаковывания, содержащий осно- оси направляющего паза 12, и выключа- вание, подпружиненное к основанию веется двигатель 5, Для поворота выходного звена 3 на угол j вклк)чается
дущее звено, выходное звено, установленное с возможностью качания вокруг оси, и привод, отличающий11
который выводит упорный ,
дущее звено, выходное звено, установленное с возможностью качания вокруг оси, и привод, отличающийдвигатель lu,
рычаг 9 из мертвого положения, пос-jc с я темв что, с целью расщирения ле чего двигатель 18 выключается, а технологических воз.можностей за счет, упругий элемент 7 разгоняет дополни- увеличения количества фиксированных тельное звено 6, а вместе с ним выход- положений выходного звена, исполни- ное звено 3 (ведущее звено 2 остает- тельный механизм снабжен по крайней ся неподвижным)« Разгон звеньев б 40 мере одним дополнительным звеном с и 3 заканчивается при достижении упругим элементом 7 упора 19, При повороте выходного звена 3 на угол V,j/2 двигатель 18 включается и перемещает ролик 11 по пазу 13 в обратном направ- 45 оск с ведущим звеном и подпружинены лекино Достигнув упругого элемента к последнему, а приводы вед тцего и 20 звено 6 начинает его сжимать и дополнительного звеньев включают происходит торможение звеньев б и 3, упорный рычаг с закрепленным на нем i во время которого кинетическая энер- роликом, установленный с возможностью гия подвижных звеньев б и 3 переходит д возвратно-поступательного перемещения в потенциальную энергию упругого эле- по направляющему пазу, причем направ- мента 20„ В тот момент, когда ось ляющие пазы для обоих роликов выпол- упорного рычага 9 перпендикулярна - нены на ведущем звене.
приводом и связанным жестко с выходным звеном, при этом выходное и дополнительное звенья установлены с возможностью качания вокруг одной
В1МИПИ Заказ 4379/18 Тираж 664
Ироизв.-полигр, пр-тке, г. Ужгород, ул. Проектная, 4
21623
оси направляющего паза 3, двигатель 18 выключается и выходное звено 3 ос- танавлив .етсяо Движение в обратном
с направлении осуществляется аналогичным образом,, При этом последовательность включения двигателей 5 и 18 может быть самой разнообразной. Аналогично работает исполнительный ме 10 ханизм, в который введено несколько дополнительных звеньев
При равенстве углов и по- зиции II и III совпадают и, таким образом, число позиций выстоя выход15 ного ,3Вена 3 равно 3. но Зо
Использование предлагаемого исполнительного механизма устройства для упаковывания позволяет расширить
20 технологические возможности за счет увеличения количества фиксированных положений выходного звена, исключить из конструкции устройства для упаковывания большое количество передаточ25 ных механизмов, что повьппает надежность устройства и его долговечность,
Формула изобретения
Исполнительный механизм устройст- ва для упаковывания, содержащий осно- вание, подпружиненное к основанию веИсполнительный механизм устройст- ва для упаковывания, содержащий осно- вание, подпружиненное к основанию ведущее звено, выходное звено, установленное с возможностью качания вокруг оси, и привод, отличающийс я темв что, с целью расщирения технологических воз.можностей за счет увеличения количества фиксированных положений выходного звена, исполни- тельный механизм снабжен по крайней мере одним дополнительным звеном с оск с ведущим звеном и подпружинены к последнему, а приводы вед тцего и дополнительного звеньев включают упорный рычаг с закрепленным на нем роликом, установленный с возможностью возвратно-поступательного перемещения по направляющему пазу, причем направ- ляющие пазы для обоих роликов выпол- нены на ведущем звене.
приводом и связанным жестко с выходным звеном, при этом выходное и дополнительное звенья установлены с возможностью качания вокруг одной
Подписное
| Соколов А.Я | |||
| Основы расчета и конструирования машин и автоматов пищевых производств | |||
| - М,; Маии- ностррение, 1969, с | |||
| Приспособление для получения световых декораций на прозрачном экране | 1920 |
|
SU527A1 |
| Станки и инструмент, 1984, Г 4, с.10, рис.ба. | |||
