Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин и средств различного назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую и освобождение изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и последующее освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С. 9 и 10, рис. а - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при использовании устройства в машинах-автоматах и линиях высокой производительности.
Задачей настоящего изобретения является расширение технологических возможностей и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде подвижного основания, исполнительного механизма с ведущим звеном и губками для захвата изделий, механизма поворота подвижного основания, включающего ведущее звено, и привода, исполнительный механизм выполнен в виде многозвенного кулачково-рычажного механизма с выходными звеньями, на которых закреплены губки для захвата изделий, а механизм поворота основания выполнен в виде кулачкового механизма с коромыслом, при этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой.
Коромысло кулачкового механизма и подвижное основание имеют единый центр качания, при этом основание жестко соединено с коромыслом, по меньшей мере, в двух местах.
Кулачково-рычажный механизм включает кулачок с центрально расположенным толкателем и выходные звенья с губками для захвата изделий, шарнирно связанные с упомянутым толкателем посредством шатунов.
Кинематическая связь ведущих звеньев механизма поворота основания и исполнительного механизма выполнена в виде двух шкивов и гибкого элемента, при этом один шкив жестко укреплен на валу кулачка механизма поворота основания, а другой -смонтирован на оси качания основания и жестко соединен с ведущим звеном исполнительного механизма.
Комбинированный механизм с двумя ведущими звеньями, выполненными в виде кулачков, удовлетворяет структурной формуле кинематической цепи W=3•n-2•р5-р4= 3•8-2•10-2=2, где W - число степеней свободы выходных звеньев; n - число подвижных звеньев, n= 8; р5 - число низших кинематических пар, p5=10; р4 - число высших кинематических пар, р4=2.
Толкатель кулачково-рычажного механизма сопряжен с направляющей, жестко укрепленной на подвижном основании.
Выходные звенья исполнительного механизма с губками для захвата изделий смонтированы шарнирно на оси, жестко укрепленной на подвижном основании.
Кулачки механизма поворота основания и исполнительного механизма имеют равновеликие симметричные профили.
Устройство снабжено плитой с криволинейным пазом и опорным роликом, смонтированным на подвижном основании и расположенным в упомянутом пазу.
Начальные радиус-векторы кулачков смещены по фазе на 90o, при этом кулачок механизма поворота основания отстает по фазе на упомянутый угол от кулачка исполнительного механизма.
Шатуны кулачково-рычажного механизма смонтированы шарнирно на оси, жестко укрепленной на толкателе, при этом свободный конец каждого шатуна шарнирно соединен с соответствующим выходным звеном.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающей отбор мощности на механизм поворота подвижного основания и исполнительный механизм с губками для захвата изделий от одного электромеханического привода. Предложенная связь конструктивных элементов и взаимное расположение элементов в совокупности обеспечивают упрощение конструкции привода, повышение точности функционирования исполнительного механизма, возможность быстродействия устройства и соответствующего повышения его производительности, расширяют диапазон передаваемых объектов манипулирования.
Жесткое соединение подвижного основания, несущего исполнительный механизм, с выходным звеном (т.е. с коромыслом) механизма поворота основания упрощает компоновку упомянутых звеньев, обеспечивая им единый центр качания.
Выполнение исполнительного механизма в виде кулачка, с толкателем которого кинематически связаны посредством шатунов выходные звенья с губками для захвата изделий, упрощает в целом схему и конструкцию исполнительного механизма.
Гибкая связь между механизмом поворота основания и исполнительным механизмом обеспечивает синхронность движения их ведущих звеньев. Это повышает точность функционирования устройства в соответствии с циклограммой и упрощает отбор мощности от одного электромеханического привода.
Комбинированный механизм устройства, имея два ведущих звена, обеспечивает при простоте кинематической цепи сложное движение выходных звеньев с губками для захвата изделий. Данный механизм удовлетворяет первому условию работоспособности, т.е. соответствует структурной формуле кинематической цепи (формуле Чебышева).
Толкатель кулачково-рычажного механизма совершает сложное движение: подъемно-опускное с выстоями под действием кулачка и возвратно-поворотное с выстоями, равновеликое движению подвижного основания. Компоновка направляющей для поступательного движения толкателя непосредственно на подвижном основании значительно упрощает конструкцию. Направляющая может быть выполнена сдвоенной, состоящей из двух подшипников, удаленных друг от друга по длине подвижного основания. Сдвоенная направляющая в большей мере исключает упругие деформации толкателя и повышает точность функционирования исполнительного механизма.
Шарнирная связь выходных звеньев исполнительного механизма с подвижным основанием дает возможность губкам для захвата изделий совершать сложное движение: возвратно-поворотное с выстоями вместе с подвижным основанием и возвратно-поворотное с выстоями относительно основания. Повороты губок относительно основания обеспечиваются посредством толкателя кулачково-рычажного механизма.
Использование кулачков с равновеликими симметричными профилями в кинематической цепи предлагаемого устройства имеет важное преимущество - в интервале кинематического цикла легко обеспечивается последовательность интервалов движения и выстоев исполнительных звеньев в соответствии с циклограммой работы устройства.
Наличие опорного ролика на подвижном основании, взаимодействующего с фигурным пазом неподвижной плиты, уменьшает консоль в креплении основания относительно оси его качания и способствует уменьшению упругих деформаций основания, возможных при значительных массах объектов манипулирования. В результате обеспечиваются необходимая жесткость основания и точность функционирования устройства.
Отставание кулачка механизма поворота основания по фазе от кулачка исполнительного механизма на 90o позволяет при обратном (холостом) ходе подвижного основания толкателю кулачково-рычажного механизма выстаивать при минимальном радиус-векторе кулачка, а губкам занимать "разжатое" положение, т.е. быть готовыми к "схвату" нового изделия.
Шатуны исполнительного механизма в шарнирной связи с выходными звеньями образуют параллелограмм, одна из вершин которого шарнирно связана с толкателем кулачково-рычажного механизма. Такая связь позволяет трансформировать возвратно-поступательное движение упомянутого толкателя в поворотное движение губок относительно основания. Схема преобразования движения проста и надежна.
Предлагаемое устройство типа "рука" для передачи изделий поясняется чертежами.
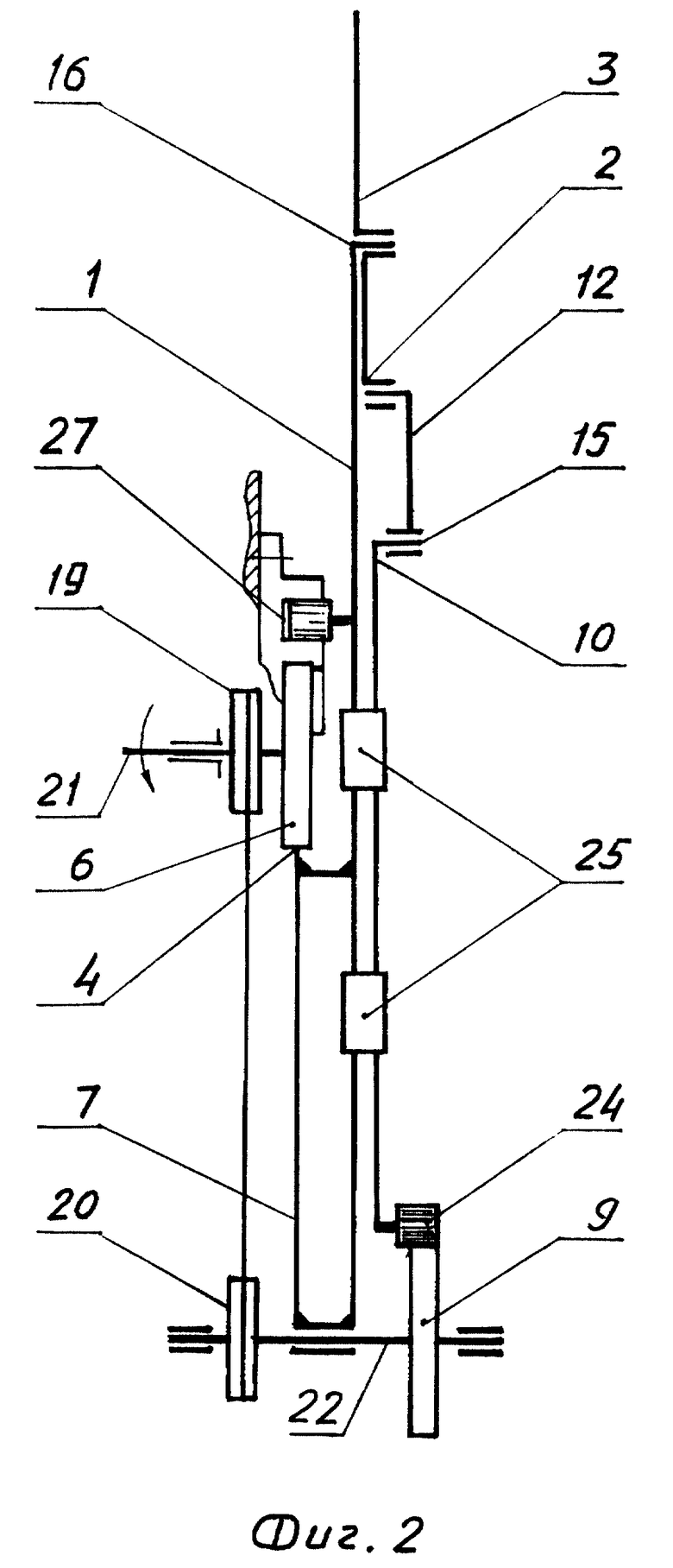
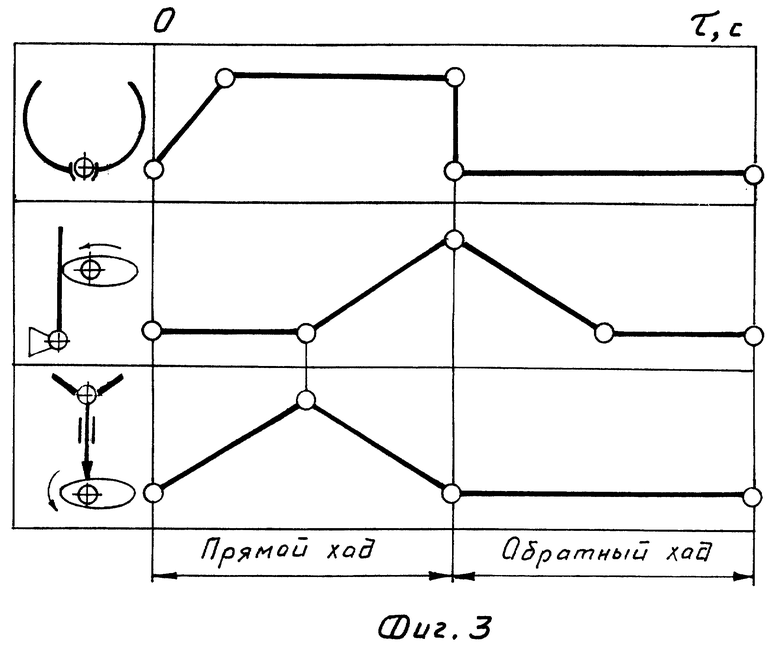
На фиг. 1 изображена кинематическая схема устройства; на фиг.2 - то же, вид сбоку; на фиг.3 - циклограмма.
Устройство содержит подвижное основание 1, исполнительный механизм 2 с губками 3 для захвата изделий, механизм 4, который обеспечивает возвратно-поворотное движение основания 1, и привод 5.
Механизм 4 выполнен в виде кулачкового механизма, который включает ведущий дисковый кулачок 6 и сопрягаемое с ним коромысло 7.
Исполнительный механизм 2 выполнен в виде многозвенного кулачково-рычажного механизма, который включает базовый кулачковый механизм 8, состоящий из кулачка 9 и толкателя 10, шатуны 11 и 12 и выходные звенья 13 и 14 с губками 3 для захвата изделий. При этом шатуны 11 и 12 шарнирно соединены с толкателем 10 посредством пальца 15, жестко укрепленного на упомянутом толкателе, а выходные звенья 13 и 14 - с подвижным основанием 1 посредством пальца 16, жестко укрепленного непосредственно на основании 1. Шатуны и выходные звенья в кинематической связи образуют посредством шарниров 17 и 18 параллелограмм с изменяющимися длинами диагоналей.
Кинематическая связь кулачков 6 и 9 механизмов 4 и 2 содержит шкивы 19 и 20, смонтированные соответственно на валу 21 кулачка 6 и оси 22 кулачка 9, и гибкий элемент 23 для передачи вращения по схеме: вал 21 кулачка 6 - шкив 20, смонтированный на оси 22, с укрепленным на ней кулачком 9.
Коромысло 7 механизма 4 и подвижное основание 1 имеют общую ось 22 качания, при этом они жестко соединены между собой в двух местах и шарнирно соединены с упомянутой осью.
Толкатель 10 кулачкового механизма 8 сопряжен с профилем ведущего кулачка 9 посредством ролика 24. Направляющая 25 для толкателя 10 выполнена сдвоенной и жестко укреплена на подвижном основании 1.
На подвижном основании 1 смонтирован опорный ролик 26 для взаимодействия с дугообразным пазом 27 неподвижной плиты 28.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал 21 с закрепленными на нем кулачком 6 и шкивом 19 совершает равномерное вращательное движение, которое посредством коромысла 7, сопрягаемого с профилем упомянутого кулачка, преобразуется в возвратно-поворотное движение основания 1 с выстоями. Кроме того, вращение вала 21 трансформируется посредством шкивов 19 и 20, кулачка 9 с толкателем 10 и шатунов 11 и 12 в возвратно-поворотное движение выходных звеньев 13 и 14 с выстоями последних относительно основания, 1, при этом губки 3 совершают движения, аналогичные движениям выходных звеньев, с которыми они жестко соединены.
При работе устройства начало прямого хода механизма 4 отстает на фазовый угол, равный 90o, от начала прямого хода механизма 2 (фиг.3). При обратном ходе толкатель 10 выстаивает в крайнем нижнем положении, при этом губки 3 находятся в разжатом положении. Выстой подвижного основания 1 в первой половине прямого хода, соответствующий его положению в позиции "схвата" изделия, способствует надежной подаче объекта манипулирования в зону между разомкнутыми губками.
При работе устройства ролик 26 взаимодействует с криволинейным пазом 27 неподвижной плиты 28, исключая прогиб и вибрации основания.
Выполнение устройства для передачи изделий в виде кинематически связанных кулачкового механизма с коромыслом и кулачково-рычажного механизма, с толкателем которого связаны посредством шатунов выходные звенья с губками для захвата изделий, позволяет расширить технологические возможности использования устройства и повысить его производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин и средств различного назначения. Устройство содержит подвижное основание, исполнительный механизм с губками для захвата изделий, механизм поворота подвижного основания и привод. Исполнительный механизм выполнен в виде многозвенного кулачково-рычажного механизма, включающего кулачок с центрально расположенным толкателем и выходными звеньями с губками, шарнирно связанными с толкателем посредством шатунов. Механизм поворота основания выполнен в виде кулачкового механизма с коромыслом. Коромысло и подвижное основание имеют единый центр качания, при этом основание жестко соединено с коромыслом, по меньшей мере, в двух местах. Ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой. Кинематическая связь выполнена в виде двух шкивов и гибкого элемента. Изобретение упрощает конструкцию привода, повышает точность функционирования исполнительного механизма. 10 з.п. ф-лы, 3 ил.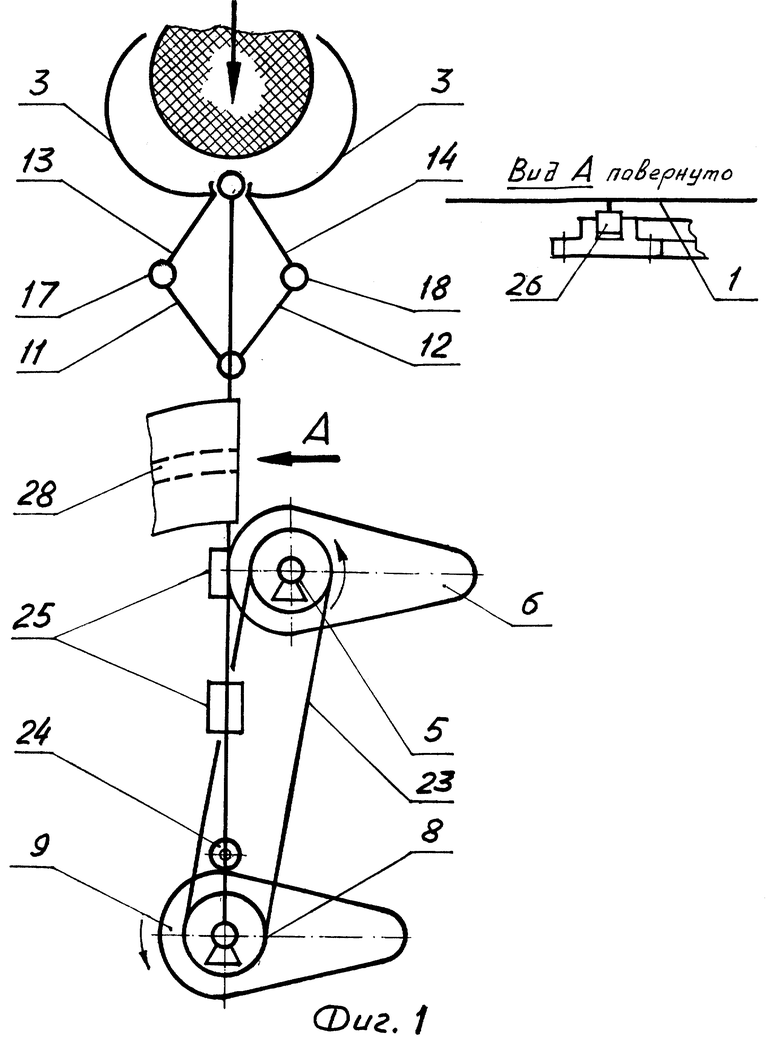
W= 3•n-2•р5-р4= 3•8-2•10-2= 2,
где W - число степеней свободы выходных звеньев;
n - число подвижных звеньев, n= 8;
р5 - число низших кинематических пар, р5= 10;
р4 - число высших кинематических пар, р4= 2.
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Механическая рука | 1982 |
|
SU1110623A1 |
| SU 1293022 A2, 28.02.1987 | |||
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

