Изобретение относится к механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм в виде кривошипно-коромыслового механизма с выходным звеном, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно сопряжены с выходным звеном передаточного механизма, и привод (патент РФ №2193963, опубл. в БИПМ, 2002, №34 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является криволинейность траектории движения выходных звеньев исполнительного механизма с губками для захвата изделий. Это нередко снижает эффективность применения таких устройств для выполнения операций между машинами в технологических линиях, поскольку приводит к необходимости уменьшения скорости движения выходных звеньев при выполнении рабочих ходов, т.е. при переносе изделий от машины к машине. В результате уменьшается частота повторения рабочих циклов и производительность.
Задачей настоящего изобретения является расширение технологических возможностей использования комбинированного механизма и повышение производительности.
Решение поставленной задачи достигается тем, что в комбинированном механизме со сложным движением выходных звеньев, содержащем передаточный механизм в виде кривошипно-шатунного механизма, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, передаточный механизм выполнен в виде четырехзвенного прямолинейно направляющего механизма Чебышева с двуплечим шатуном, одно из плеч шатуна кинематически связывает передаточный и исполнительный механизмы, а ведущим звеном исполнительного механизма является шатун передаточного механизма, при этом кинематическая связь передаточного и исполнительного механизмов включает жестко закрепленные на шатуне палец и стержень для подвижной связи выходных звеньев исполнительного механизма с шатуном и силовые упругие элементы для связи выходных звеньев с упомянутым стержнем.
Губки для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях жестко, но разъемно.
Исполнительный механизм снабжен промежуточным звеном в виде неподвижного кулачка с фигурными пазами для взаимодействия с выходными звеньями в интервале их рабочего хода, при котором губки для захвата изделий занимают сжатое положение.
Силовые упругие элементы выполнены в виде пружин сжатия, каждая из которых одним концом связана с закрепленным на шатуне стержнем, а другим - с соответствующим выходным звеном, при этом в интервале холостого хода пружины обеспечивают фиксированное положение выходных звеньев исполнительного механизма относительно шатуна, при котором губки для захвата изделий занимают разжатое положение.
Предложенный передаточный механизм (он в составе прототипа и заявляемого многозвенника является кривошипно-коромысловым механизмом) выполнен в виде прямолинейно направляющего механизма Чебышева, который содержит шарнирно связанные кривошип, шатун, коромысло и стойку с определенными соотношениями их длин: λ1=0,5; λ2=λ3=λ4=1,25. Здесь λ1=r/d - относительная длина кривошипа; λ2=l/d - относительная длина плеча шатуна, которое связывает коромысло с кривошипом; λ3=b/d - относительная длина коромысла; λ4=h/d - относительная длина плеча шатуна, которое кинематически связывает передаточный и исполнительный механизмы; r, l, b, h - длина соответственно кривошипа, шатуна, коромысла и плеча шатуна; d - межцентровое расстояние, т.е. расстояние между центрами вращения кривошипа и качания коромысла (Артоболевский И.И.Механизмы в современной технике. - М.: Наука, 1970. - Том 1. - С.392, рис.651).
В предложенном передаточном механизме концевая точка плеча (имеющего длину h), подвижно связывающая передаточный и исполнительный механизмы, описывает за полный оборот кривошипа замкнутую траекторию, которая содержит прямолинейный участок. Этот участок реализуется в интервале прямого (рабочего) хода. При обратном (холостом) ходе упомянутая точка движется по кривой, связывающей концы прямолинейного участка. Такая траектория является предпочтительной для движения выходных звеньев исполнительного механизма с губками для захвата изделий.
Использование шатуна, совершающего сложное плоское движение, в качестве ведущего звена исполнительного механизма позволяет обеспечить движение выходных звеньев последнего по рассмотренной замкнутой траектории.
Жестко закрепленные на шатуне передаточного механизма палец и стержень являются наиболее простыми, технологичными и надежными конструктивными элементами в составе кинематической связи выходных звеньев исполнительного механизма с шатуном.
Силовые упругие элементы обеспечивают в интервале холостого хода выходных звеньев их фиксированное положение относительно шатуна, при котором губки для захвата изделий занимают разжатое положение. При этом нет взаимодействия выходных звеньев исполнительного механизма с фигурными пазами неподвижного кулачка, что упрощает конструкцию последнего и исключает потери на трение при холостом ходе.
Соответствие формы губок форме передаваемых изделий обеспечивает «схват» изделия губками по большей части его периметра (в плане). Это повышает надежность удерживания изделия губками при переносе его из одной позиции в другую.
Жесткое крепление губок на выходных звеньях позволяет губкам имитировать поворотное движение выходных звеньев. Разъемное крепление губок на выходных звеньях обеспечивает оперативную смену губок при переналадке механизма на передачу изделий другой формы.
Неподвижный кулачок - копир с фигурными пазами обеспечивает текущее положение выходных звеньев с губками в интервале их рабочего хода. В начале хода губки сжимаются («схват изделия»), при выполнении хода губки занимают сжатое положение («удерживание изделия»), в конце хода губки разжимаются («выдача изделия»). Законы движения выходных звеньев с губками определяются рабочими профилями фигурных пазов. Копир выполнен в виде плоской неподвижной плиты с фигурными пазами. Выходные звенья исполнительного механизма взаимодействуют с пазами копира только при рабочем ходе, т.е. при переносе объекта манипулирования из одной позиции в другую.
Силовые упругие элементы, выполненные в виде пружин сжатия, обеспечивают необходимое фиксированное положение выходных звеньев с губками относительно шатуна при выполнении комбинированным механизмом холостых ходов. Использование пружин является простым и надежным конструктивным решением.
Заявляемый механизм отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими повышение производительности, снижение энергозатрат на реализацию процесса передачи изделий и расширение технологических возможностей для использования механизма. Механизм удовлетворяет первому условию работоспособности, определяемому формулой Чебышева:
W=3·n-2р5-р4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев: кривошип, шатун, коромысло, выходное звено исполнительного механизма, n=4;
р5 - число низших кинематических пар (без учета пассивной связи, т.е. связи шатуна с одним из звеньев исполнительного механизма), р5=5;
р4 - число высших кинематических пар (сопряжение выходного звена с рабочим профилем фигурного паза копира), р4=1.
Предлагаемый комбинированный механизм со сложным движением выходных звеньев поясняется чертежами.
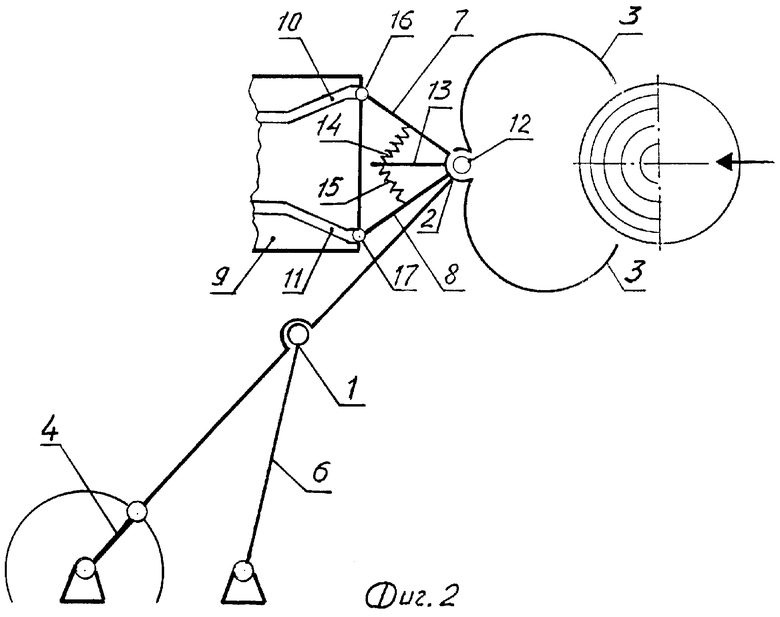
На фиг.1 изображена схема передаточного механизма с траекторией движения точки шатуна; на фиг.2 - кинематическая схема комбинированного механизма.
Комбинированный механизм со сложным движением выходных звеньев содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод.
Механизм 1 выполнен в виде четырехзвенного прямолинейно направляющего механизма Чебышева, который включает шарнирно связанные звенья: кривошип 4, жестко закрепленный на валу привода, шатун 5, коромысло 6 и стойку. Шатун 5 механизма выполнен двуплечим (плечи L и Н), при этом плечо L связывает кривошип с коромыслом, а плечо Н кинематически связывает передаточный и исполнительный механизмы. Длины звеньев и плеч шатуна механизма 1 соответствуют значениям:
λ1=0,5; λ2=λ3=λ4=1,25. Здесь
λ1=r/d - относительная длина кривошипа;
λ2=l/d - относительная длина плеча L шатуна;
λ3=b/d - относительная длина коромысла;
λ4=h/d - относительная длина плеча Н шатуна;
r, l, b, h - длина соответственно кривошипа, плеча L=AB, коромысла, плеча Н=ВС;
d - длина стойки, d=OO1 (фиг.1).
При упомянутых относительных длинах звеньев и плеч шатуна 5 точка на свободном конце плеча Н (точка связи передаточного и исполнительного механизмов) в периоде полного оборота кривошипа 4 описывает замкнутую плоскую траекторию (фиг.1). В интервале прямого хода механизма эта траектория представляет собой прямую линию Рн Рк, а при обратном ходе она является кривой, связывающей концы прямолинейного участка.
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, он включает ведущее звено, которым является шатун 5 передаточного механизма, выходные звенья 7 и 8 с губками 3 для захвата изделий и неподвижный кулачок - копир 9 с фигурными пазами 10 и 11 для сопряжения с выходными звеньями. На свободном конце плеча Н шатуна жестко закреплены палец 12 для шарнирной связи выходных звеньев с шатуном и стержень 13 для подвижной связи шатуна с выходными звеньями посредством силовых упругих элементов 14 и 15, выполненных в виде пружин сжатия. На свободных концах выходных звеньев 7 и 8 смонтированы ролики 16 и 17 для сопряжения с фигурными пазами 10 и 11 копира 9. Поворотное движение выходных звеньев относительно стержня 13 осуществляется по закону, определяемому рабочими профилями фигурных пазов 10 и 11.
Губки 3 выполнены по форме передаваемых изделий и жестко, но разъемно закреплены на выходных звеньях. Границы прямого и обратного ходов выходных звеньев соответствуют позициям «схват изделия» и «выдача изделия». Ролики выходных звеньев взаимодействуют с фигурными пазами копира 9 только в интервале прямых (рабочих) ходов, обеспечивая при этом сжатое положение губок.
Каждая из пружин 14 или 15 одним концом связана с закрепленным на шатуне стержнем 13, а другим - с соответствующим выходным звеном. В интервале холостого хода, т.е. при отсутствии взаимодействия роликов 16 и 17 с фигурными пазами копира 9, пружины обеспечивают фиксированное положение выходных звеньев исполнительного механизма относительно шатуна 5, при котором губки 3 занимают разжатое положение.
Комбинированный механизм со сложным движением выходных звеньев работает следующим образом.
При работе привода вращение кривошипа 4 передаточного механизма 1 преобразуется посредством промежуточных звеньев в сложное движение выходных звеньев 7 и 8 с губками 3 для захвата изделий. Выходные звенья совершают сложное плоское движение вместе с шатуном 5 и возвратно-поворотное движение относительно шатуна с выстоями определенной продолжительности.
На границах прямого и обратного ходов выходные звенья занимают посредством силовых упругих элементов фиксированное положение относительно шатуна, при этом губки 3 оказываются в разжатом положении. В позиции «схват изделия» в разжатые губки подается объект манипулирования. В момент начала рабочего хода ролики 16 и 17 выходных звеньев входят в сопряжение с фигурными пазами копира 9, при этом губки занимают сжатое положение. При рабочем ходе губки контактируют с изделием по большей части его периметра, надежно удерживая изделие, переносимое из одной позиции в другую.
В интервале прямого (рабочего) хода палец 12, несущий выходные звенья и губки с изделием, перемещается по прямолинейной траектории Рн Рк (фиг.1). В позиции «выдача изделия» ролики выходных звеньев выходят из сопряжения с фигурными пазами копира 9, при этом пружины 14 и 15 переводят выходные звенья в фиксированное относительно шатуна положение, при котором губки 3 оказываются разжатыми, после чего изделие выводится из механизма.
При обратном (холостом) ходе палец 12, несущий выходные звенья, совершает движение по криволинейной траектории, связывающей концевые точки Рк и Рн траектории, реализованной при рабочем ходе, при этом ролики выходных звеньев не взаимодействуют с фигурными пазами копира 9 и губки 3 занимают разжатое положение. Предпочтительно, что губки 3 оказываются готовыми для приема изделия до прихода их в позицию «схват изделия».
Последующие рабочие циклы выполняются аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
Комбинированный механизм относится к устройствам, которые применяются при обслуживании машин, станков, прессов и другого оборудования. Он содержит передаточный механизм, исполнительный механизм с губками для захвата изделий и привод. Передаточный механизм выполнен в виде четырехзвенного прямолинейно направляющего механизма Чебышева с двуплечим шатуном, одно из плеч шатуна кинематически связывает передаточный и исполнительный механизмы, а ведущим звеном исполнительного механизма является шатун передаточного механизма. Кинематическая связь передаточного и исполнительного механизмов включает жестко закрепленные на шатуне палец и стержень для подвижной связи выходных звеньев исполнительного механизма с шатуном и силовые упругие элементы для связи выходных звеньев с упомянутым стержнем. Изобретение отличается повышенной производительностью и большими технологическими возможностями его использования. 3 з.п. ф-лы, 2 ил.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |

