циальной энергии конструкции, измеряют в ней колебания механических напряжений с помощью датчика механических напряжений 8 и второго измерительного усилителя 9.В блоке 1.0 определения момента окончания виброобработки
интегрируют отрицательные и положи- . тельные полупериоды и при достижении постоянства сумм интегралов в 5-10- последовательных периодах колебаний- обработку прекращают. 1 з. и 2 с.п. ф-лы, 3 ил., 1 табл.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ снятия остаточных напряжений в металлических конструкциях и устройство для его осуществления | 1987 |
|
SU1474175A1 |
| Устройство для вибрационной обработки детали | 1985 |
|
SU1268629A1 |
| Устройство для вибрационной обработки конструкций и деталей | 1984 |
|
SU1196384A1 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 2004 |
|
RU2274873C2 |
| Способ определения частотной характеристики испытуемого объекта и устройство для его осуществления | 1984 |
|
SU1223074A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 1992 |
|
RU2042195C1 |
| Устройство для акустических исследований скважин в процессе бурения | 1982 |
|
SU1108196A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ С АМПЛИТУДНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2042194C1 |
| Способ снятия внутренних напряжений в деталях вибрацией | 1988 |
|
SU1694659A1 |
| Устройство контроля крупности дробленой руды | 1986 |
|
SU1395366A1 |
Изобретение относится к техническим средствам стабилизации геометрических размеров металлических конструкций, имеющих остаточные напряжения, а именно к контролю процесса снижения остаточных напряжений при вибрационном старении деталей машин. Цель изобретения - улучшение качества if. сокращение времени виброобработки. Указанная цель достигается тем, что в конструкции возбуждают резонансные колебания и регистрируют ее реакцию, при этом определяют зону концентрации потенциальной энергии конструкции при резонансных колебаниях, измеряют ко- лебания механических напряжений в этой зоне, в каждом периоде колеба- НИИ интегрируют положительные и от- рицательные полупериоды и суммируют значения интегралов, а виброобработку заканчивают в момент достижения постоянства величин сумм интегралов в 5-10-последовательных периодах колебаний. Способ осздцествляется следующим образом. Конструкцию 5 механически связьшают с вибровозбудителем 1, на который через усилитель мощности 2 подают входной сигнал с задающего генератора 3. С помощью датчика вибрации 4, закрепленного на конструкции 5, первого усилителя 6 и блока фазовой подстройки резонанса 7 устанавливают резонансные колебания в конструкции 5. Затем определяют зону концентрации потенс S (Л ю tmA 00 4
1
Изобретение относится к области измерений при вибрационном снятии остаточных напряжений, образовавшихся в металлических конструкциях после технологических операций, например сварки, термообработки, литья, и может быть использовано для контроля процесса снижения остаточных напряжений несущих конструкций машин, где релаксация указанных напряжений может вызвать деформацию конструкции на этапе сборки или во время эксплуатации.
Цель изобретения - улучшение качества и сокращение времени виброобработки.
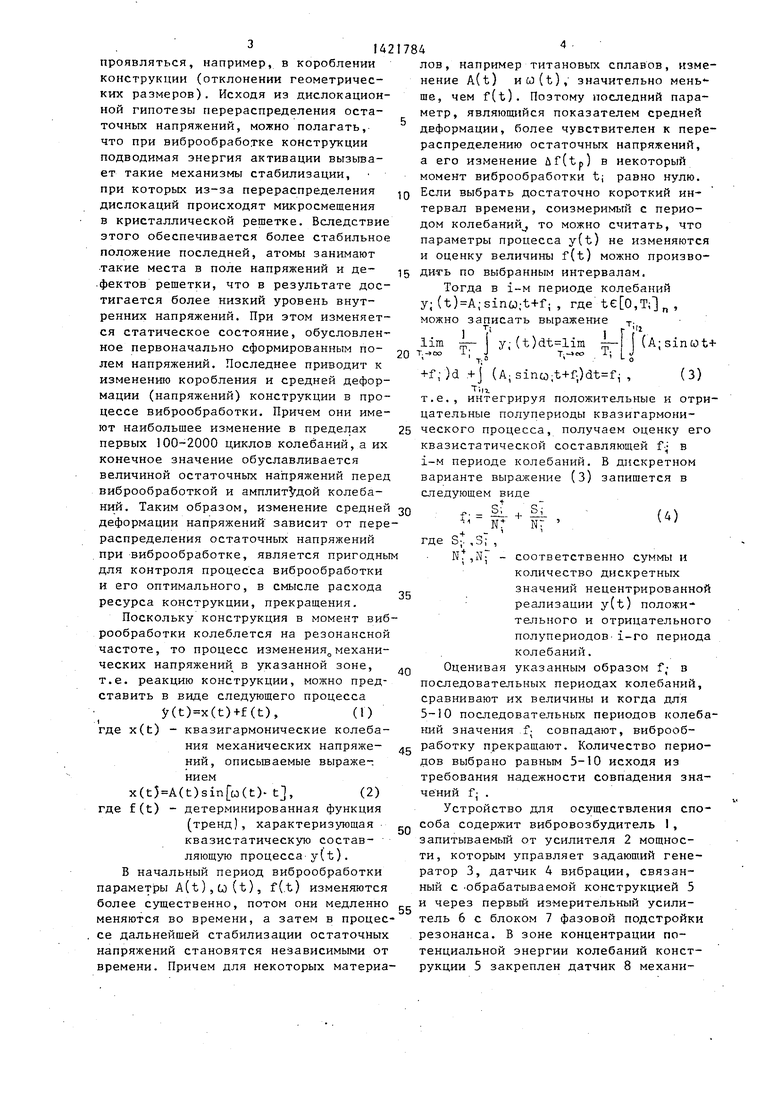
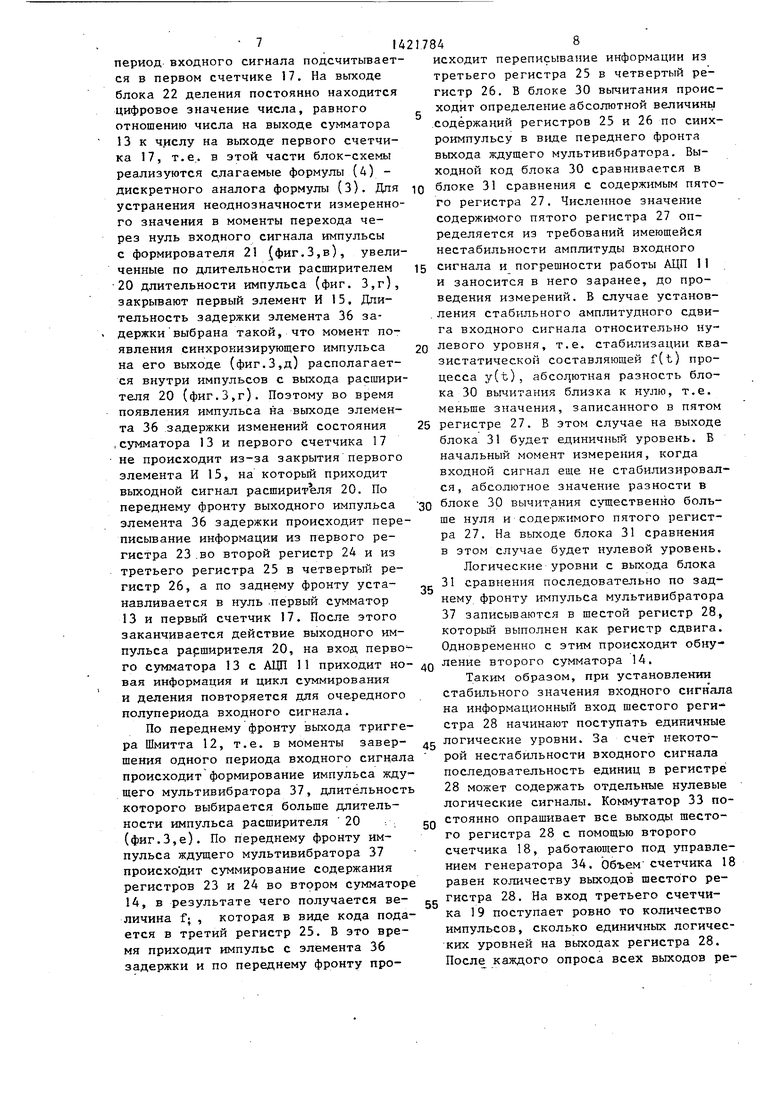
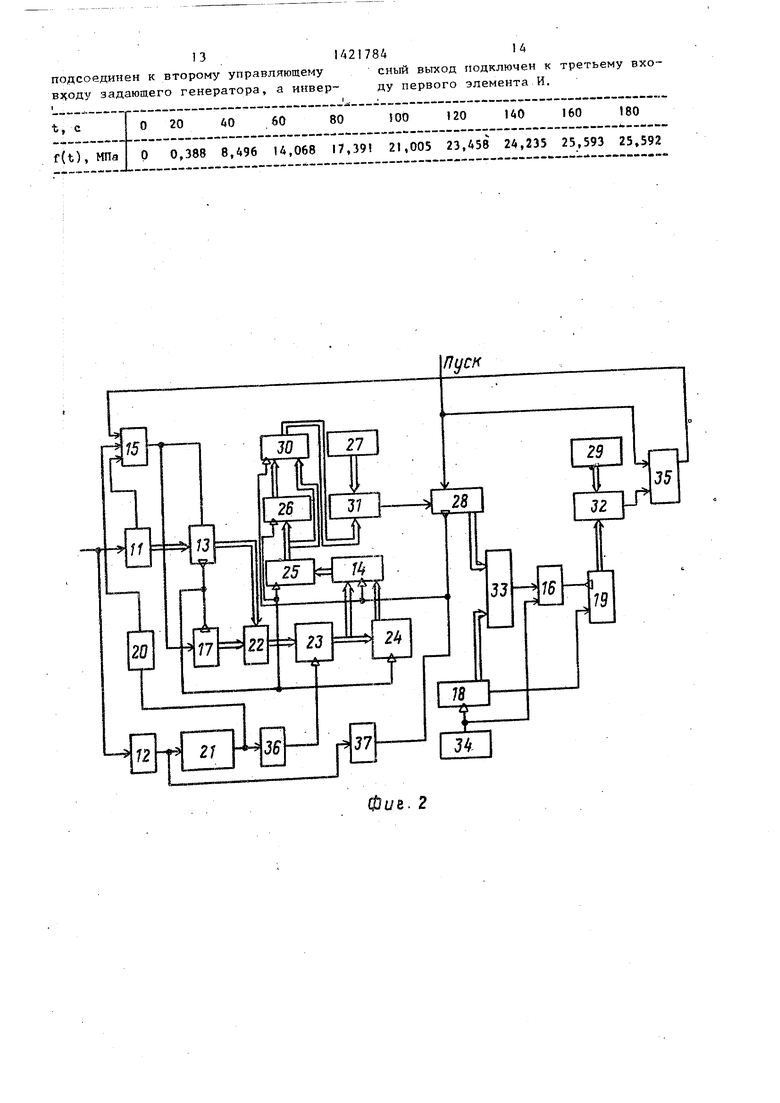
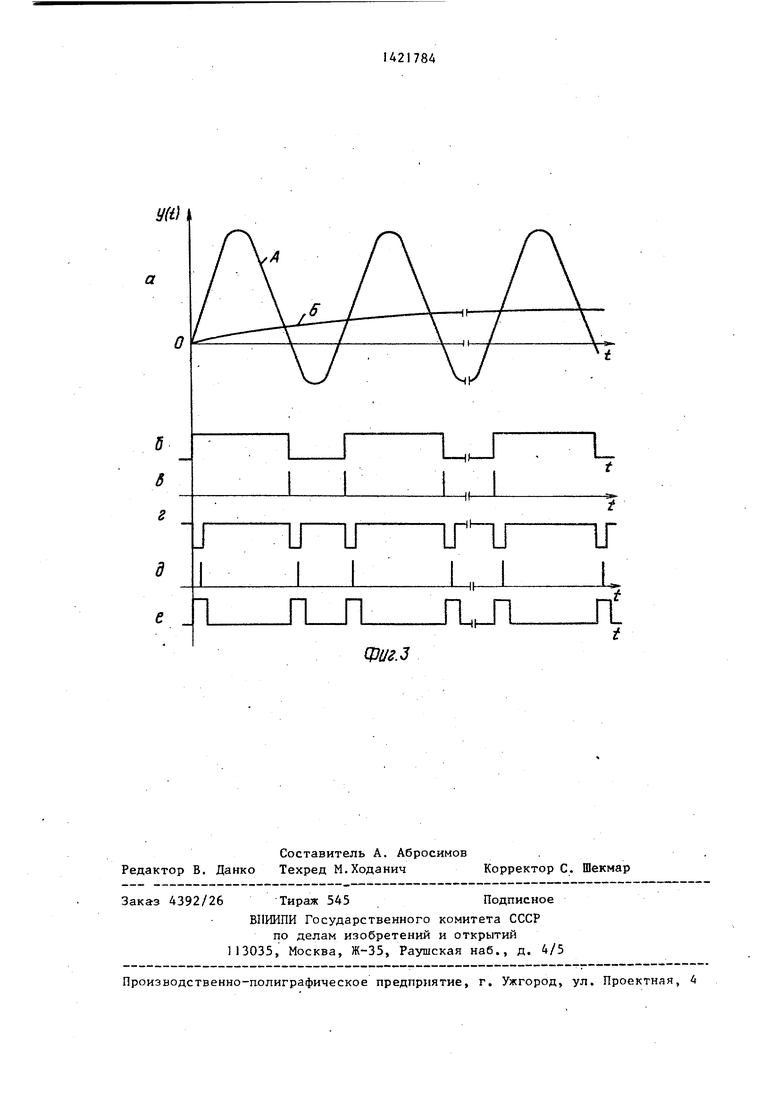
На фиг. 1 изображена блок-схема устройства для осуществления способа; на фиг. 2 - блок-схема блока оп- ределения момента виброобработки; на фиг. 3 - временные диаграммы механического напряжения при виброобработке конструкции (А) и соответствующего изменения (Б), его среднего зна- чения (а), сигналов триггера Шмитта (б), формирователя коротких импульсов (в), расширителя длительности импульсов (г), элемента задержки (д) и ждущего мультивибратора (е).
Сущность способа заключается в том, что при измерении механических напряжений в зоне конструкции, а также потенциальной энергии конструкции при резонансных колебаниях предст.ав- ляется возможность путем суммирования проинтегрированных положительных и отрицательных полупериодов колебаний механических напряжений получить оценку изменения среднего значения напряжений, характеризующего момент окончания виброобработки.
Устройство, осуществляющее способ, предназначено для измерения параметров, характеризующих процесс перераспределения остаточных напряжений в процессе проведения виброобработки конструкции, что обеспечивает определение момента ее завершения с точностью до нескольких периодов колебаний, т.е. контроль осуществляется практически в реальном масштабе времени.
Способ осуществляется следующим образом.
Конструкцию для виброобработки размещают так, чтобы она при воздействии вибрации, сообщаемой вибровозбудителем, могла свободно деформироваться. Обычно малогабаритные конструкции крепятся непосредственно на вибровозбудитеде (для виброобработки могут быть использованы электродинамические, электромагнитные, де- балансные и другие вибровозбудители) при виброобработке крупногабаритных конструкций они размещаются на рези- н овых подложках или вьшешиваются, а вибровозбудитель в этом случае располагается на- конструкции.
С помощью вибровозбудителя и системы управления проходят частотный диапазон конструкции и определяют резонансные частоты, на которых необходимо проводить виброобработку. Для низшей резонансной частоты, используя известные методы (в качестве последних можно использовать теоретические, например метод конечньос элементов, или экспериментальные, например построение фигур Хладни, стробоскопию и др.), определяют зону концентрации потенциальной энергии колебаний конструкции на данной резонансной частоте. В процессе виброобработки конструкции измеряют колебания механических напряжений в данной зоне. Остаточные напряжения в обраба- тьгоаемой конструкции формируют поле напряжений, определяющее некоторое статическое состон ие, которое может
проявляться, например, в короблении конструкции (отклонении геометрических размеров). Исходя из дислокацион- иой гипотезы перераспределения остаточных напряжений, можно полагать, что при виброобработке конструкции подводимая энергия активации вызывает такие механизмы стабилизации, при которых из-за перераспределения дислокаций происходят микросмещения в кристаллической решетке. Вследствие этого обеспечивается более стабильное положение последней, атомы занимают такие места в поле напряжений и де- .фектов решетки, что в результате достигается более низкий уровень внутренних напряжений. При этом изменяется статическое состояние, обусловленное первоначально сформированным полем напряжений. Последнее приводит к изменению коробления и средней деформации (напряжений) конструкции в процессе виброобработки. Причем они имеют наибольшее изменение в пределах первых 100-2000 циклов колебаний,а их конечное значение обуславливается величиной остаточных напряжений перед виброобработкой и амплитудой колебаний. Таким образом, изменение средней деформации напряжений зависит от перераспределения остаточных напряжений при виброобработке, является пригодны для контроля процесса виброобработки и его оптимального, в смысле расхода ресурса конструкции, прекращения.
Поскольку конструкция в момент виб рсобработки колеблется на резонансной частоте, то процесс изменения механических напряжений в указанной зоне, т.е. реакцию конструкции, можно представить в виде следующего процесса y(t)x(t)+f(t), (Г) где x(t) - квазигармонические колебания механических напряжений, описьшаемые выраже-. ни ем
x((t)(t)- t, (2) где f(t) - детерминированная функция (тренд), характеризующая квазистатическую составляющую процесса у(t). В начальный период виброобработки параметры A(t) , СО (t), f(.t) изменяются
более существенно, потом они медленно j. и через первый измерительный усили- меняются во времени, а затем в процес- тель 6 с блоком 7 фазовой подстройки се дальнейшей стабилизации остаточных напряжений становятся независимыми от времени. Причем для некоторых материарезонанса. В зоне концентрации потенциальной энергии колебаний конструкции 5 закреплен датчик 8 механи0
0
25
о лов, например титановых сплавов, изменение A(t) иcJ(t), значительно ще, чем f(t). Поэтому последний параметр, являющийся показателем средней деформации, более чувствителен к перераспределению остаточных напряжений, а его изменение uf(tp) в некоторый момент виброобработки t; равно нулю. Если выбрать достаточно короткий интервал времени, соизмеримый с периодом колебаний то можно считать, что параметры процесса y(t) не изменяются и оценку величины f(t) можно произво- 5 дить по выбранным интервалам.
Тогда в i-M периоде колебаний у; (t)A;sinU;t+f; , где ,T; , можно записать выражение T.
Т; I Г
lira -- I y;(t) ((A;sinut+
Т, i; JJ.-tfo i: J
, - 0
+f;)d +j (AiSinco;t+f;) , (3)
Tiii
т.е., интегрируя положительные и отрицательные полупериоды квазигармонического процесса, получаем оценку его квазистатической составляющей f- в i-M периоде колебаний. В дискретном варианте выражение (З) запишется в
(4)
где S;. .S;,
N|,N; - соответственно суммы и количество дискретных значений нецентрированной реализации y(t) положи- те,пьного и отрицательного полупериодов-i-ro периода колебаний.
Оценивая указанным образом f; в последовательных периодах колебаний, сравнивают их величины и когда для 5-10 последовательных периодов колебаний значения f; совпадают, виброобработку прекращают. Количество периодов выбрано равным 5-10 исходя из требования надежности совпадения значений fj .
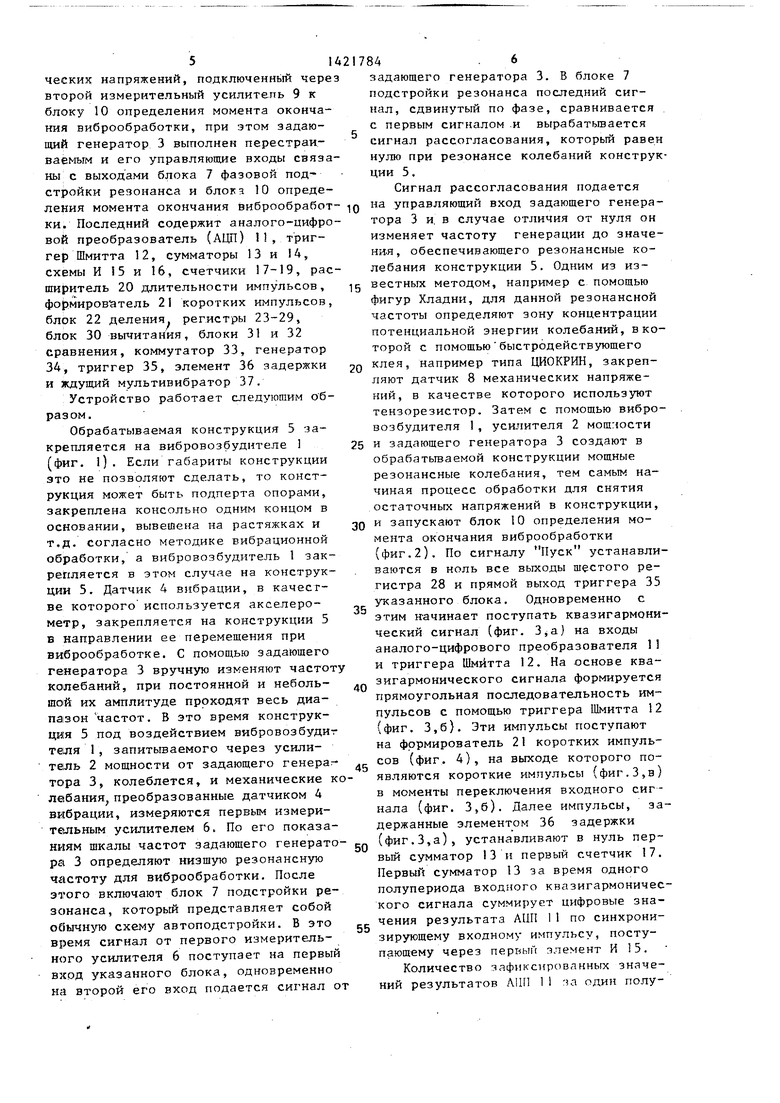
Устройство для осуществления способа содержит вибровозбудитель 1, напитываемый от усилителя 2 мощности, которым управляет задающий генератор 3, датчик 4 вибрации, связанный с Обрабатываемой конструкцией 5
и через первый измерительный усили- тель 6 с блоком 7 фазовой подстройки
резонанса. В зоне концентрации потенциальной энергии колебаний конструкции 5 закреплен датчик 8 механических напряжений, подключенньгй чере второй измерительный усилитель 9 к блоку 10 определения момента окончания виброобработки, при этом задающий генератор 3 выполнен перестраиваемым и его управляющие входы связаны с выходами блока 7 фазовой подстройки резонанса и блок я 10 определения момента окончания виброобработ ки. Последний содержит аналого-цифровой преобразователь (АЦП) 11, триггер Шмитта 12, сумматоры 13 и 4, схемы И 15 и 16, счетчики 17-19, расширитель 20 длительности импульсов, формиров Этель 21 коротких импульсов, блок 22 деления, регистры 23-29, блок 30 вычитания, блоки 31 и 32 сравнения, коммутатор 33, генератор 34, триггер 35, элемент 36 задержки и ждупшй мультивибратор 37.
Устройство работает следугошим о б- разом.
Обрабатываемая конструкция 5 закрепляется на вибровозбудителе 1 (фиг. 1). Если габариты конструкции это не позволяют сделать, то конструкция может быть подперта опорами, закреплена консольно одним концом в основании, вывешена на растяжках и т.д. согласно методике вибратдионной обработки, а вибровозбудитель 1 закрепляется в этом случае на конструкции 5. Датчик 4 вибрации, в качестве которого используется акселерометр, закрепляется на конструкции 5 в направлении ее перемещения при виброобработке. С помощью задающего генератора 3 вручную изменяют частот колебаний, при постоянной и неболь- шой их амплитуде проходят весь диапазон частот. В это время конструкция 5 под воздействием вибровозбудит теля 1, запитьшаемого через усилитель 2 мощности от задающего генераг- тора 3, колеблется, и механические клебания, преобразованные датчиком 4 вибрации, измеряются первым измерительным усилителем 6. По его показаниям шкалы частот задающего генерато pa 3 определяют низщута резонансную частоту для виброобработки. После этого включают блок 7 подстройки резонанса, который представляет собой обычную схему автоподстройки. В это время сигнал от первого измерительного усилителя 6 поступает на первый вход указанного блока, одновременно на второй его вход подается сигнал о
5 0
5 о о g g
5
задающего генератора 3. В блоке 7 подстройки резонанса последний сигнал, сдвинутый по фазе, сравнивается с первым сигналом ,и вырабатьшается сигнал рассогласования, который равен нулю при резонансе колебаний конструкции 5.
Сигнал рассогласования подается на управляющий вход задающего генератора 3 и, в случае отличия от нуля он изменяет частоту генерации до значения, обеспечивающего резонансные колебания конструкции 5. Одним из известных методом, например с помощью фигур Хладни, для данной резонансной частоты определяют зону концентрации потенциальной энергии колебаний, в которой с помощью быстродействующего клея, например типа ЦИОКРИН, закрепляют датчик 8 механических напряжений, в качестве которого используют тензорезистор. Затем с помощью вибровозбудителя , усилителя 2 мощности и задающего генератора 3 создают в обрабатьгааемой конструкции мощные резонансные колебания, тем самым начиная процесс обработки для снятия остаточных напряжений в конструкции, и запускают блок 10 определения момента окончания виброобработки {фиг.2). По сигналу Пуск устанавливаются в ноль все выходы щестого регистра 28 и прямой выход триггера 35 указанного блока. Одновременно с этим начинает поступать квазигармонический сигнал (фиг. ) на входы аналого-цифрового преобразователя 1 и триггера Шмйтта 12. На основе квазигармонического сигнала формируется прямоугольная последовательность импульсов с помощью триггера Шмитта 12 (фиг. 3,б}. Эти импульсы поступают на формирователь 21 коротких импульсов (фиг. 4), на выходе которого появляются короткие импульсы (фиг.3,в) в моменты переключения входного сигнала (фиг. 3,б). Далее импульсы, задержанные элементом 36 задержки (фиг.3,а), устанавливают в нуль первый сумматор 13 и первый счетчик 17. Первый сумматор 13 за время одного полупериода входного квазигармонического сигнала суммирует цифровые значения результата АПП 11 по синхронизирующему входному импульсу, поступающему через первый злемент И 15,
Количество зафиксированных значений результатов Л1И1 11 за один полупериод входного сигнала подсчитывается в первом счетчике 17. На выходе блока 22 деления постоянно находится цифровое значение числа, равного отношению числа на выходе сумматора 13 к числу на выходе первого счетчика 17, т.е.. в этой части блок-схемы реализуются слагаемые формулы (4) - дискретного аналога формулы (З). Для устранения неоднозначности измеренного значения в моменты перехода через нуль входного сигнала импульсы с формирователя 21 (фиг.3,в), увеличенные по длительности распшрителем
20 длительности импульса (фиг. 3,г), закрывают первый элемент И 15, Длительность задержки элемента 36 задержки выбрана такой, что момент появления синхронизирующего импульса на его выходе (фиг.3,д) располагается внутри импульсов с выхода расширителя 20 (фиг.3,г). Поэтому во время появления импульса на выходе элемента 36 задержки изменений состояния
, сзгмматора 13 и первого счетчика 17 не происходит из-за закрытия первого элемента И 15, на который приходит выходной сигнал расширителя 20. По переднему фронту выходного импульса элемента 36 задержки происходит переписывание информации из первого регистра 23 .во второй регистр 24 и из третьего регистра 25 в четвертый регистр 26, а по заднему фронту устанавливается в нуль .первый сумматор 13 и первый счетчик 17. После этого заканчивается действие выходного импульса рарширителя 20, на вход перво
10
15
исходит переписывание информации из третьего регистра 25 в четвертый регистр 26. В блоке 30 вычитания происходит определение абсолютной величины содержаний регистров 25 и 26 по синхроимпульсу в вцце переднего фронта выхода ждущего мультивибратора. Выходной код блока 30 сравнивается в блоке 31 сравнения с содержимым пятого регистра 27. Численное значение содержимого пятого регистра 27 определяется из требований имеющейся нестабильности амплитуды входного сигнала и погрешности работы АЦП 1I и заносится в него заранее, до проведения измерений. В случае установления стабильного амплитудного сдвига входного сигнала относительно нулевого уровня, т.е. стабилизации квазистатической составляющей f(t) процесса y(t) , абсолютная разность блока 30 вычитания близка к нулю, т.е. меньше значения, записанного в пятом регистре 27. В этом случае на выходе блока 31 будет единичный уровень. Б начальный момент измерения, когда входной сигнал еще не стабилизировался, абсолютное значение разности в 30 блоке 30 вычит.ания существенно больше нуля и содержимого пятого регистра 27. На выходе блока 31 сравнения в этом случае будет нулевой уровень. Логические уровни с выхода блока 31 сравнения последовательно по заднему фронту импульса мультивибратора 37 записываются в шестой регистр 28, который выполнен как регистр сдвига. Одновременно с 3TiiM происходит обну20
25
35
го сумматора 13 с АЦП 11 приходит но- 40 ление второго сумматора 14.
вая информация и цикл суммирования Таким образом, при установлении
стабильного значения входного сигн ала на информационный вход шестого регии деления повторяется для очередного полупериода входного сигнала.
По переднему фронту выхода триггера Шмитта 12, т.е. в моменты завер- 5 шения одного периода входного сигнала происходит формирование импульса ждущего мультивибратора 37, длительность которого выбирается больше длительности импульса расширителя 20 L gg (фиг.3,е). По переднему фронту импульса ждущего мультивибратора 37 происходит суммирование содержания регистров 23 и 24 во втором сумматоре 14, в результате чего получается ве- ее личина f; , которая в виде кода подается в третий регистр 25. В это время приходит импульс с элемента 36 задержки и по переднему фронту простра 28 начинают поступать единичные логические уровни. За счет некоторой нестабильности входного сигнала последовательность единиц в регистре 28 может содержать отдельные нулевые логические сигналы. Коммутатор 33 постоянно опрашивает все выходы шестого регистра 28 с помощью второго счетчика 18, работающего под управлением генератора 34. Объем счетчика 18 равен количеству выходов шестого регистра 28. На вход третьего счетчика 19 поступает ровно то количество импульсов, сколько единичных логических уровней на выходах регистра 28. После каждого опроса всех выходов ре
5
исходит переписывание информации из третьего регистра 25 в четвертый регистр 26. В блоке 30 вычитания происходит определение абсолютной величины содержаний регистров 25 и 26 по синхроимпульсу в вцце переднего фронта выхода ждущего мультивибратора. Выходной код блока 30 сравнивается в блоке 31 сравнения с содержимым пятого регистра 27. Численное значение содержимого пятого регистра 27 определяется из требований имеющейся нестабильности амплитуды входного сигнала и погрешности работы АЦП 1I и заносится в него заранее, до проведения измерений. В случае установления стабильного амплитудного сдвига входного сигнала относительно нулевого уровня, т.е. стабилизации квазистатической составляющей f(t) процесса y(t) , абсолютная разность блока 30 вычитания близка к нулю, т.е. меньше значения, записанного в пятом регистре 27. В этом случае на выходе блока 31 будет единичный уровень. Б начальный момент измерения, когда входной сигнал еще не стабилизировался, абсолютное значение разности в 0 блоке 30 вычит.ания существенно больше нуля и содержимого пятого регистра 27. На выходе блока 31 сравнения в этом случае будет нулевой уровень. Логические уровни с выхода блока 31 сравнения последовательно по заднему фронту импульса мультивибратора 37 записываются в шестой регистр 28, который выполнен как регистр сдвига. Одновременно с 3TiiM происходит обну0
5
5
стра 28 начинают поступать единичные логические уровни. За счет некоторой нестабильности входного сигнала последовательность единиц в регистре 28 может содержать отдельные нулевые логические сигналы. Коммутатор 33 постоянно опрашивает все выходы шестого регистра 28 с помощью второго счетчика 18, работающего под управлением генератора 34. Объем счетчика 18 равен количеству выходов шестого регистра 28. На вход третьего счетчика 19 поступает ровно то количество импульсов, сколько единичных логических уровней на выходах регистра 28. После каждого опроса всех выходов регистра 28 третий счетчик 19 сбрасывается в нуль импульсом с выхода переполнения второго счетчика 18, которы также устанавливается в нуль и начинает новый подсчет количества импульсов с генератора 34.
Содержимое третьего счетчика 19 постоянно сравнивается с содержимым седьмого регистра 29 в блоке 32 срав нения. Если число на выходе счетчика J9 превысит число, записанное в седьмой регистр 29, на выходе блока 32 сравнения появится единичный логический уровень, устанавливающий триггер 35 в единичное состояние. Положительный уровень с его прямого. выхода является выходным сигналом рассматриваемого блока определения момента окончания виброобработки, он отключает задакадий генератор 3 устройства, а нулевой уровень на traBepc- ном выходе триггера закрьшает первый элемент И i 5 для остановки работы Сум1 1атора 13 и первого .счетчика 17. Число, предварительно записываемое в седьмой регистр 29, определяет количество допустимых кулевых логических сигналов в последовательности, единичных на выходе регистра 28 в момент окончания виброобработки и должно быть чуть меньше или равно количеству выходов регистра Z8.
Поскольку каждый разряд шестого регистра 28 соответствует одному пе- риоду квазигармонических колебаний, то в пределах 5-10 периодов в момент когда f (-f )const., в регистре имеем почти все единицы. Таким образом, занося в седьмой регистр 29 число 5-10 добиваемся надежного срабатывания рассматриваемого блока при прекращении изменения квазистатической составляющей и определения момента завершения внброобработки, ,
Завершение виброобработки на низшей резонансной частоте позволяет осуществить ее на следующей резонансной частоте, если ик несколько, айа- погично указанному. .
Пример. Необходимо обработать плоский стальной (ст.20) стержень размерами 59Q%22fS мм. Для виброобработки его закрепили за срединную часть на столе электродинамического вибростенда 9t 3000 так, что образовалось две консоли. Для автоподстройки на резонансную частоту закрепили аксельрометр типа КД35 на конце консоли, подсоединили его к измерительному усилителю SM 2 П и включили виб- ростенд с малыми амплитудами колебаний. Установили частоту резонансных колебаний, которая оказалась равной 75 Гц. На этой частоте определили с помощью фигур Хладни, посыпав мелкий песок на широкую плоскость стёржня, зону концентрации напряжений, которая оказалась вблизи крепления стержня к вибройтенду, наклеили в ней тензорезистор, подключили его к тензо усилителю и отбалансировали О тен- зоусилителя. Затем, добившись максимального размаха консоли при резонансной частоте, включили блок автоподстройки и определения момента окончания виброобработки. После обработки в течение 3 мин квазигармоническая составляюгЦая процесса стабилизировалась и виброобработку прекратили по сигналу с блока определенияЕ момента окончания виброобработки. Проведенные частичные остановы и измерения f(t) указывают на полную ее стабилизацию за это время (см. таблицу) .
Для оценки эффективности виброобработки в установленной зоне измеряли остаточные напряжения перед обработкой и после нее при помощи дифрак- тометра. Было зарегистрировано сниже-i ние уровня остаточных напряжений до 40%. .
Осуществление предложенного способа позволяет точно фиксировать время прекращения виброобработки, тем самым экономить энергию и сберегать ресурс обрабатьюаемой конструкции; автоматизировать виброобработку на линиях изготовления ОДНОТРШНЫХ деталей в целях стабилизации их остаточных напряжений и улучшения качества.
Формула изобретения
f
I, Способ виброобработки конструкции для снижения остаточных напряжений, включающий возбуждение колебаний в обрабатьюаемой конструкции на резонансных частотах и регистрацию ее реакции, отличающийся тем, что, с целью улучшения качества и сокращения времени виброобработки, определяют зону концентрации потенциальной энергии конструкции при резонансных колебаниях, измеряют колебания механических напряжений в этой зоне, в каждом периоде колебаний интегрируют положительные и отрицательные полупериоды и суммируют вначения интегралов, а виброобработку заканчивают в момент достижения постоянства величин сумм интегралов в 5-10-после- довательных периодах колебаний.
оно дополнительно снабжено блоком фазовой подстройки резонанса, последовательно соединенными датчиками механических напряжений, закрепленными на конструкции, вторым измерительным усилителем и блоком опреде- ления момента окончания виброобработки, причем вьпсод первого измерительного усилителя подсоединен к первому входу блока фазовой подстройки резонанса, второй вход которого соеди- нен с выходом задающего генератора, который вьтолнен перестраиваемым, при этом его первый управляющий сое- динен с выходом блока фазовой подстройки частоты, а второй управляющий вход соединен с выходом блока опредепения момента окончания виброоб- работки,
п 5 0
0
g Q g
5
вому входу первого элемента И, выход которого подсоединен к счетным входам первого сумматора и первого счетчика, второй вход первого элемента И через последовательно соединенные расширитель длительности импульса и формирователь коротких импульсов подсоединен к выходу триггера Шмитта, информационные выходы первого сумматора и первого счетчика подсоединены к отделы ным входам блока деления выходы ког торого через первый регистр подсоединены к второму регистру, выходы обоих регистров подсоединены к входам второго сумматора, выходы которого через третий регистр подсоединены к входам четвертого регистра, а выходы третьего и четвертого регистров подсоединены к отдельным входам блока вычита- . ния, подсоединенного к первым входам первого блока сравнения, вторые входы которого соединены с пятым регистром, а выход подсоединен к информационному входу шестого регистра, синхронизирующие входы первого, второго, третьего и четвертого регистров вместе с- входа-ми установки в О первого сумматора и первого счетчика соединены с выходом элемента задержки, вход которого соединен с вьгходом формирот вателя коротких импульсов, вход ждущего мультивибратора соединен с выходом триггера Шмитта, а выход подсоединен к счетному входу и входу установки в О второго сумматора, счетному входу блока вычитания и синхро- . низирующему входу шестого регистра, вход сброса шестого регистра, сое- диненньй с входом сброса триггера, подсоединен к входу Пуск блока определения момента окончания виброобработки, а информационные выходы шестого регистра соединены с соответствующими входами коммутатора, адресные входы последнего также подсоединены к первому входу второго элемента И, второй вход которого подсоединен к вькоду коммутатора, выход второго элемента И подсоединен к счетному входу третьего счетчика, вход сброса которого соединен с выходом переполнения второго счетчика, информационные выходы третьего счетчика соединены с первыми входами второго блока сравнения, вторые входы которого подсоединены к выходам седьмого регистра, а выход подсоединен к входу установ- ки триггера, прямой выход которого
3I/42I784U
подсоединен к второму управляющему сный выход подключен к третьему вхо- задающего генератора, а инвер- ду первого элемента И.
J
1
L
t
t
If
ЯЛ
л
иг.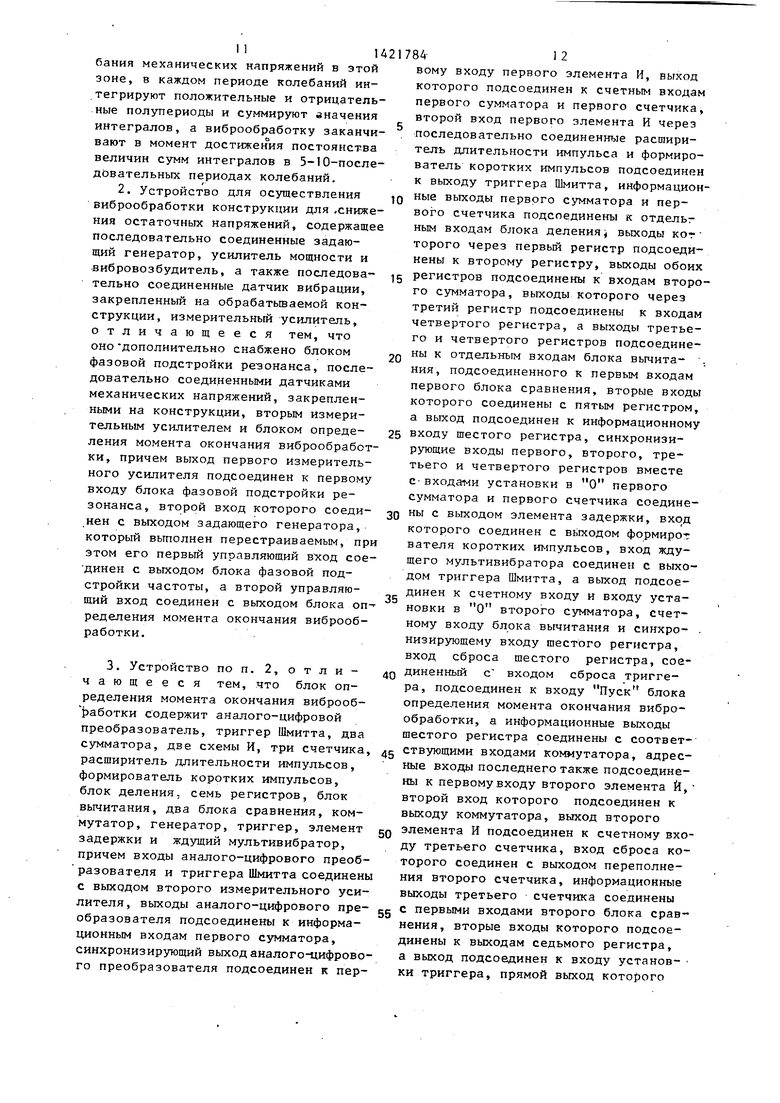
| Способ контроля процесса виброобработки конструкций | 1976 |
|
SU621749A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ контроля процесса вибро-ОбРАбОТКи КОНСТРуКций и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU798185A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
