4 Ю Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕМПЕРАТУРНОЕ РЕЛЕ | 1995 |
|
RU2087979C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ТЕЛЕСНЫЙ ДАТЧИК ИМПУЛЬСА СИЛЫ | 2002 |
|
RU2234736C2 |
| ДАТЧИК ОБРЫВА НИТИ | 1992 |
|
RU2049034C1 |
| ДАТЧИК ОТРЫВА | 1995 |
|
RU2091892C1 |
| Переключатель | 1980 |
|
SU886094A1 |
| ДИСКРЕТНЫЙ УРОВНЕМЕР | 2001 |
|
RU2193165C1 |
| Реле протока жидкости | 1985 |
|
SU1379823A1 |
| Кнопочный переключатель | 1981 |
|
SU1003187A1 |
| Электромагнитный коммутационный аппарат | 1972 |
|
SU519782A1 |
Изобретение относится к приборостроению и позволяет повысить точность измерений за счет улучшения динамической характеристики устройства и снижения вероятности ложного срабатывания. В корпусе 1 консольно установлена плоская пружина 4, на которой закреплены ферромагнитная пластина 5 и постоянный магнит 3, взаимодействующий с герконом 10. С зазором относительно ферромагнитной пластины 5 установлен базовый постоянный магнит 7, связанный с корпусом 1 через винтовой регулятор 6. Динамическая характеристика шагомера имеет пилообразную форму при правильной юстировке зазора между ферромагнитной пластиной 5 и базовым постоянным магнитом 7. 2 ил.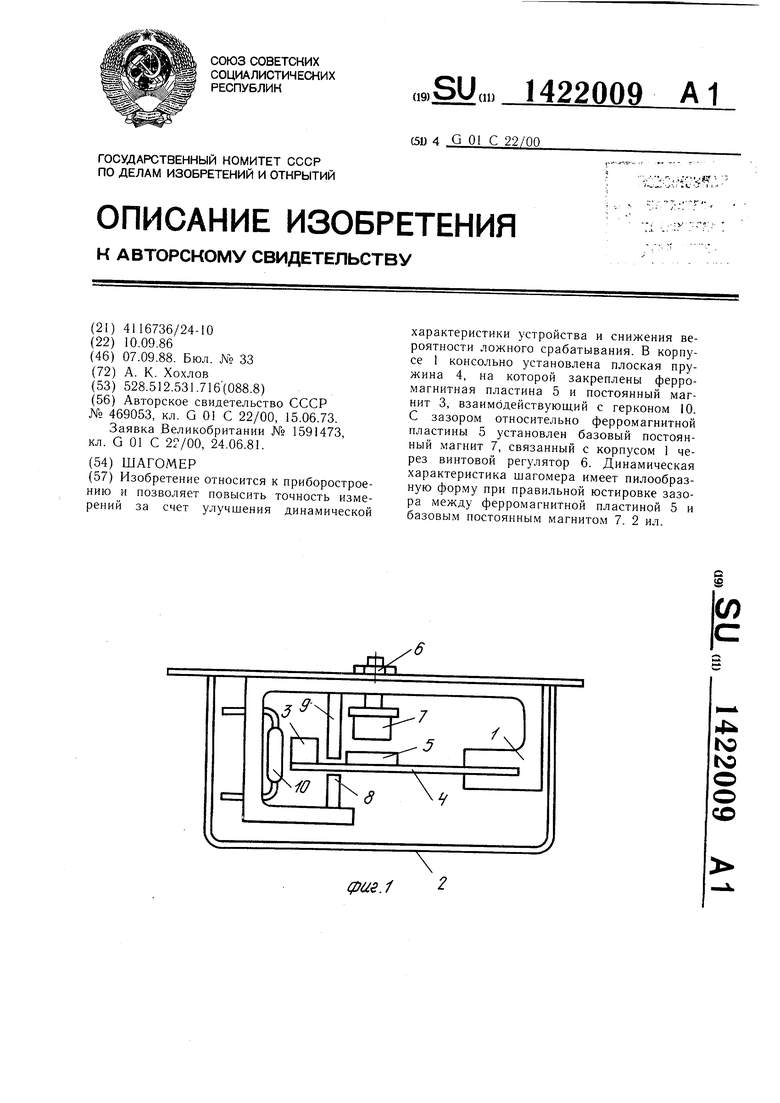
СО
(US.I
Изобретение относится к приборостроению, в частности к шагомерам, и может быть использовано в спорте, медицине и других областях.
Целью изобретения является повышение точности за счет улучшения динамической характеристики устройства.
На фиг. 1 представлена схема шагомера; на фиг. 2 - динамическая характеристика устройства.
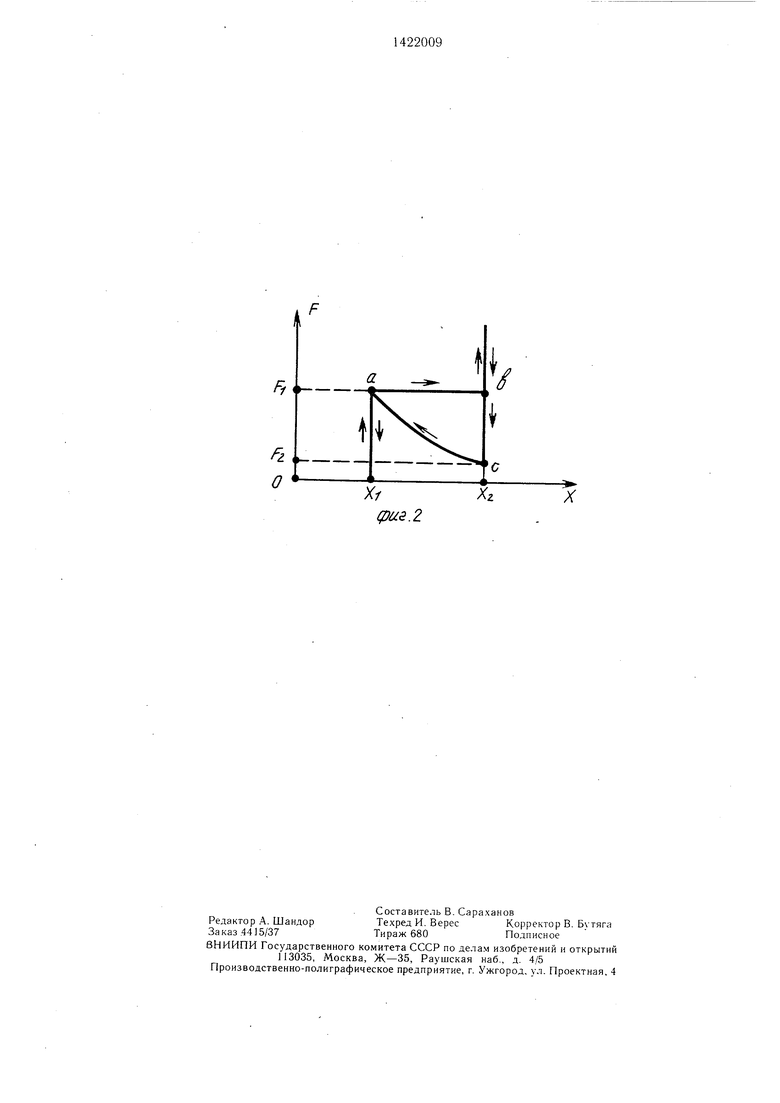
денный на фиг. 2, где по оси OF отложена сила, действуюш,ая на подвижную массу, а по оси ОХ - перемеш,ение массы относительно центра магнита 7.
Датчик работает следующим образом, В исходном состоянии подвижная масса зафиксирована в верхнем положении (точка Xi) за счет силы притяжения магнита 7 и ферромагнитной пластины 5, а контакт геркона 10 разомкнут. Вертикальное
Шагомер содержит корпус 1, заключен- ig ускорение, возникаюшее при каждом шаге ченыи в экран 2, груз в виде постоянного магнита 3, плоскую пружину 4 и ферромагнитную пластину 5, над которой на винтовом регуляторе б укреплен базовый постоянный магнит 7. На корпусе расположены ограничители 8 и 9 перемещения подвижной Массы, а также контактный узел, содержаш,ий магнит 3 и геркон 10, подключенный к счетчику (не показан).
Для получения характеристики движения подвижной массы, исключающей ложные срабатывания датчика, необходимо чтобы силе притяжения между магнитом 7. и ферромагнитной пластиной 5 противодействовала сила тяжести подвижной массы. Это достигается расположением магнита
ловека, увеличивает силу тяжести подвижной массы. До тех пор, пока сила тяжести не превысила силу притяжения магнита (F), подвижная масса остается в верхнем положении (отрезок Xi, а). При даль- 5 нейшем увеличении силы тяжести подвижная масса скачком перемещается до нижнего упора (точка Ха), контакт геркона замыкается и на вход электронной схемы поступает счетный импульс.
На фиг. 2 этот переход отображен отрезком (ав), причем фиксация промежуточного положения подвижной массы (между точками Xi и Х2) невозможна, так как сила тяжести за время перемещения остается практически неизменной, а сила притяжения маг20
над ферромагнитной пластиной, закреплен- 25 нита уменьшается. По окончании действия
ной на подвижной массе, и выполнением условий:
сила притяжения между магнитом и ферромагнитным элементом для минимального рабочего зазора между ними (Рбмин) равна весу подвижной массы (т) в момент воздей- 30 ствия на нее наименьшего из регистрируемых ускорений (амин) (а«ин-)-g)m, где g - ускорение свободного падения; сила притяжения между магнитом и ферромагнитным элементом для максимального
ускорения сила тяжести уменьшается (отрезок ее), а подвижная масса остается на нижнем упоре (Х2) до тех пор, пока сила тяжести не сравняется с силой притяжения магнита (р2) дли нижнего упора.
При дальнейшем уменьшении силы тяжести подвижная масса под действием силы притяжения магнита перемещается (кривая со) в верхнее, исходное положение (Xi), а контакт геркона разомкнут. Меняя зазор между магнитом 7 и ферромагнитной пластирабочего зазора между ними больше 5 ной 5 с помощью регулировочного винсобственного веса подвижной массы на некоторую величину (К), большую нуля PSMUKC (К + g}m, где К - коэффициент, характеризующий скорость самовозврата
та 6, можно в щироких пределах менять чувствительность датчика; при этом способе регулировки не изменяются колебательные свойства массы, зависящие от длины
подвижной массы в исходное положение дО пружины и величины массы, и следоваК 0; сила притяжения между магнитом и ферромагнитным элементом для минимального рабочего зазора() больше силы при- тяжения для максима-льного рабочего зазора
(pRMaKc PjMHH .
Параметры плоской пружины 4 выбираются таким образом, чтобы сила упругости в зоне перемещения подвижной массы была значительно меньше силы притяжения магнита и не оказывала существенного влияния на работу датчика, пружина, таким образом, используется только как несущий элемент.
Также необходимо обеспечить превышение силы притяжения над силой тяжести
45
50
тельно, не ухудшаются точностные характеристики датчика при различном темпе движения. Экран 2 предназначен для исключения влияния на датчик шага внешних магнитных нолей.
Формула изобретения
Шагомер, содержащий плоскую пружину с грузом, консольно закрепленную в корпусе, контактный узел, винтовой регулятор и счетчик, отличающийся тем, что, с целью повышения точности за счет улучшения динамической характеристики, он снабжен установленными с зазором ферромагнитной пластиной, закрепленной на пружине, и базопри отсутствии вертикального ускорения в 55 постоянным магнитом, связанным с корнижнеи точке нахождения подвижной массы. При соблюдении этих условий динамическая характеристика массы имеет вид, привепусом через винтовой регулятор, груз выполнен в виде постоянного магнита, а контактный узел выполнен в виде геркона.
денный на фиг. 2, где по оси OF отложена сила, действуюш,ая на подвижную массу, а по оси ОХ - перемеш,ение массы относительно центра магнита 7.
Датчик работает следующим образом, В исходном состоянии подвижная масса зафиксирована в верхнем положении (точка Xi) за счет силы притяжения магнита 7 и ферромагнитной пластины 5, а контакт геркона 10 разомкнут. Вертикальное
ловека, увеличивает силу тяжести подвижной массы. До тех пор, пока сила тяжести не превысила силу притяжения магнита (F), подвижная масса остается в верхнем положении (отрезок Xi, а). При даль- 5 нейшем увеличении силы тяжести подвижная масса скачком перемещается до нижнего упора (точка Ха), контакт геркона замыкается и на вход электронной схемы поступает счетный импульс.
На фиг. 2 этот переход отображен отрезком (ав), причем фиксация промежуточного положения подвижной массы (между точками Xi и Х2) невозможна, так как сила тяжести за время перемещения остается практически неизменной, а сила притяжения маг0
нита уменьшается. По окончании действия
ускорения сила тяжести уменьшается (отрезок ее), а подвижная масса остается на нижнем упоре (Х2) до тех пор, пока сила тяжести не сравняется с силой притяжения магнита (р2) дли нижнего упора.
При дальнейшем уменьшении силы тяжести подвижная масса под действием силы притяжения магнита перемещается (кривая со) в верхнее, исходное положение (Xi), а контакт геркона разомкнут. Меняя зазор между магнитом 7 и ферромагнитной пластиной 5 с помощью регулировочного винной 5 с помощью регулировочного винта 6, можно в щироких пределах менять чувствительность датчика; при этом способе регулировки не изменяются колебательные свойства массы, зависящие от длины
5
0
тельно, не ухудшаются точностные характеристики датчика при различном темпе движения. Экран 2 предназначен для исключения влияния на датчик шага внешних магнитных нолей.
Формула изобретения
Шагомер, содержащий плоскую пружину с грузом, консольно закрепленную в корпусе, контактный узел, винтовой регулятор и счетчик, отличающийся тем, что, с целью повышения точности за счет улучшения динамической характеристики, он снабжен установленными с зазором ферромагнитной пластиной, закрепленной на пружине, и базопусом через винтовой регулятор, груз выполнен в виде постоянного магнита, а контактный узел выполнен в виде геркона.
Хг
X
фи$.2
| Шагомер | 1973 |
|
SU469053A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка Великобритании № 1591473, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
