го
СХ)
H:iiifipeieMiie относится к механизации жипогиоиплстна в се.чьском хозяйстве и мо Ж(т Г)Ы1Ь iipHMfHOHO для автомати: иропан- ного приготовления стебельчатых кормоп сельскохозяйственным животным.
Цель изобретения - повыш еиие точности дозирования корма
На чертеже показано устройстве) для непрерывного дозирования корма.
Устройство содержит средства в виде емкостей для подачи компонентов корма: стебельчатою I, сыпучего 2, жидкого 3 и других. Регулирование потоков осуществляется с помощью исполнительных механизмов 4 посредством регулятора 5 согласно выходному сигналу датчика толщины слоя корма (датчик дозы корма). В качестве выходного преобразующего элемента датчика используется сельсин 6, вал которого посредством муфты соединен с осью 7 щар- нира. Ось 7 с помощью подщипников 8 закреплена над транспортером 9 приема компонентов кормов посредством стоек 10. На оси 7 жестко закреплен рычаг II, один конец которого связан с неподвижным основанием пружиной 12 через регулируемую тягу 13. Рычаг II посредством ПОД1ПИППИКОВ 14 связан также с вальцом 15, который с помощью передачи 16, например цепной, снабжен электроприводом с электродвигателем 17, закрепленным на рычаге 11 и получающим питание по гибкому кабелю.
Рычаг 11 соединен с неподвижным основанием пружиной, которая может работать как на натяжение, так и на сжатие. Регулятор 5 может быть выполнен с помоп1ью серийно выпускаемых приборов, например, с помощью регулирующего аналогового блока с непрерывным выходным сигналом типа Р 17, который может выполнять сравнение сигналов, алгебраическое суммирование, масштабирование, преобразование сигналов по определенным законам, демпфирование и т. д.
Устройство работает следующим образом.
Включается двигатель 17 и через передачу 16 передает вращение вальцу 15 в направлении, которое соответствует направлению движения транспортера 9. Стебельчатый компонент корма, например сено, из емкости I поступает на транспортер 9. Г1ос;1едний подает сено к вальцу 15, который под действием силы давления сена на валец и благодаря птрнирному закреплению вальца, отклоняется в сторону и вверх, с помощью пружины 12 создается необходимое давление вальца 15 на корм для выравнивания колебаний объемной массы корма в результате чего образуется зазор М1 жду вальцом и транспортером. Благодари пулнчию |фивода 17 сено затаскивается и зазор, что способствует дальнейшему с)1к. И)пению вальца н сторону и пнерх В зависимости от толщины слои корма h ва
0
5
0
5
0
5
0
5
лоц 1Г). иодпружимсиный через рычаг II пружнно) 12, подмнмается над трипспор- тером 9 и отклоняет pi.i tai 1 I на угол п. На такой же уго.ч отклоняется вал сельсина Г). В с(нпиетстпии с выходным сигналом сс. 1ьсина ре1уля1ор 5 подает сигналы на исполнительные ме.ханизмы 4, с по- м(мцью которых изменяется подача компо- нептов корма. Например, стабилизируется подача стебельчатого компонента на заданном уровне и пропорционально массе корма под вальцом 15 регулируется подача других компонентов.
В случае, ec;ui па транспортер 9 поступает количество стебельчатого корма выше заранее заданной нормы, устройство сравнения преобразует в регуляторе 5 выходной сигнал сельсина 6 в сигнал управления потоком стебельчатого компонента таким образом, что подача этого компонента уменьшается до заданной нормы. Для других компонентов в этом случае сигнал управления таков, что увеличивается поток кормов в соответствии с заранее заданным соотноп1ением к стебельчатому компоненту. При поступлении на транспортер 9 количества стебельчатого компонента ниже заранее заданной нормы сигналы управления регулятора таковы, что увеличивается подача стебельчатого компонента корма и уменьшаются потоки других компонентов. При этом управление исполнительными механизмами по выходному сигналу сельсина может осуществляться и по другим законам с помощью известных регуляторов.
Таким образом, наличие привода вальца, который связан с рычагом, щарнирно закрепленным на оси над транспортером, позволяет применить пружину значительно большей жесткости, что позволит повысить точность дозирования компонентов кормов примерно на 10% при значительной степени неравномерности подачи стебельчатого компонента по плотности, а также позволяет отказаться от весового датчика подачи этого компонента корма, что значительно удешевляет устройство. Снижается также и энергоемкость дозирования, а применение сельсина позволяет расширить функциональные возможности устройства путем регулирования потока стебельчатого компонента корма, а также корнеплодов и дру- 1 их кормов, входящих в состав кормосмеси.
Формула изобретения
Устройство для непрерывного дозирования корма, содержащее срс.чстна для подачи стебельчатого и жилкою компонентов на транспортер, выио.тмениые в виде емкостей с исн().тни П . механизмами, датчик толщины с.чоя кормя на транспортере. П1)(Ч)бразу|(маим мсмсш которою кнне- м;пич ч-ки сиязли с им.. ст;жовленным подвижно и всршк.ч.п.ион м. юскости над
,1424780
34
транспортером, и подключен к входу ре-пня точности допирования, в.члои снабжен гу. ттора. выходы которого соединены с вхо-электроприводом и устаноплеп на подпрудами исполнительных механизмов подачижиненном рычаге, ось которою жестко жидкого и стебельчатого компонентов корма,соединена с осью преобразующего элемента. отличающееся тем, что. с целью повы1пе-i выполненного в виде сельсина.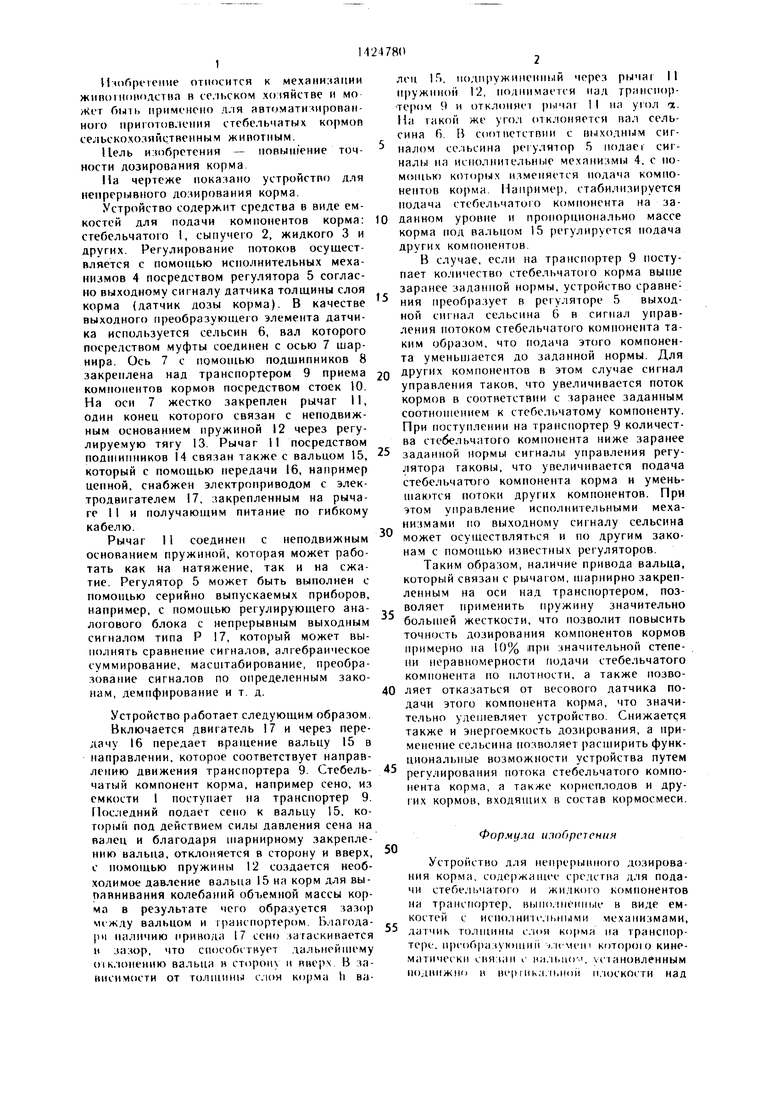
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для непрерывного дозирования корма | 1989 |
|
SU1639551A2 |
| Устройство непрерывного дозирования корма | 1983 |
|
SU1142076A1 |
| Устройство для отделения твердых примесей от стебельчатых кормов | 1987 |
|
SU1470280A2 |
| Устройство И.И.Сташевского для хранения стебельчатых кормов | 1988 |
|
SU1607737A1 |
| Автоматический дозатор кормов впОТОКЕ | 1978 |
|
SU818570A1 |
| Кормораздатчик | 1983 |
|
SU1114385A1 |
| Питатель-дозатор стебельчатых кормов | 1983 |
|
SU1130291A1 |
| Установка для приготовления влажных кормосмесей | 1990 |
|
SU1759388A1 |
| Устройство для отделения примесей от стебельчатых кормов | 1984 |
|
SU1158095A1 |
| Автоматический питатель раздатчика кормов | 1986 |
|
SU1445651A1 |
Изобретение относится к автоматизации животноводческих процессов. Цель изобретения - повышение точности дозирования стебельчатых, сыпучих и других кормов с различными компонентами. Устройство содержит подпружиненный валец 15, шарнирно закрепленный с помощью рычага 11 на оси 7 над транспортером 9. На транспортер 9 подаются компоненты корма из емкостей I, 2, 3 с компонентами корма, оборудованными исполнительными механизмами 4 для регули- рова)1ия потоков компонентов посредством регулятора 5 по выходному сигналу сельсина 6. Вал сельсина жестко соединен с осью 7, при этом валец 15 передачей 16 связан с двигателем 17. Шарнирное закрепление вальца 15 и наличие привода 17 позволяют повысить точность дозирования корма при -неравномерной подаче стебельчатого компонента, йапример сена из емкости 1, и использовании пружины 12 большой жесткости. При подаче сена пружииа воздействует на валец и отклоняет его. В образоравшийся зазор между вальцом и транспортером 9 сено затягивается с помощью двигателя 17, уплотняется, что способствует дальнейшему отклонению вальца, и протускается под вальцом, при этом тол- шина корма на транспортере будет пропорциональна выходному сигналу сельсина. 1 ил. 9 (Л
| Устройство непрерывного дозирования корма | 1983 |
|
SU1142076A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
