сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик с дистанционным управлением | 1977 |
|
SU644423A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Дозатор непрерывного действия | 1980 |
|
SU934234A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1255867A1 |
| Установка для приготовления влажных кормосмесей | 1990 |
|
SU1759388A1 |
| Питатель-дозатор стебельчатых кормов | 1983 |
|
SU1130291A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1451547A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
Изобретение относится к сельскому хозяйству, а именно к автоматизации раздачи стебельных кормов. Цель изобретения - повышение точности дозирования кормов. Дозирование корма из бункера 1 осуществляется посредством транспортеров 3 и 5, битеров 4 и приводного вала 6, соединенного с валом 7 отбора мощности трактора. Измерение расхода корма, подаваемого с транспортера 5, осуществляется измерителем момента 10 и измерителем силовой реакции 12, информационные с; гналы которых сравниваются блоком сравнения 19 с сигналом блока формирования задающих программ 20. Регулирование величины расхода корма до заданного значения осуществляется посредством пропорционально- интегрального регулирующего блока 25 путем изменения напряжения возбуждения электромагнитной муфты 9, передающей приводной момент на продольный транспортер 3 и битеры 4. 1 з.п. ф-лы, 1 ил. S
4 4
сл
о:
ел
Изобретение относится к сельскому хозяйству, а именно к автоматизации раз дачи стебельчатых кормов.
Цель изобретения - повышение точности дозирования кормов.
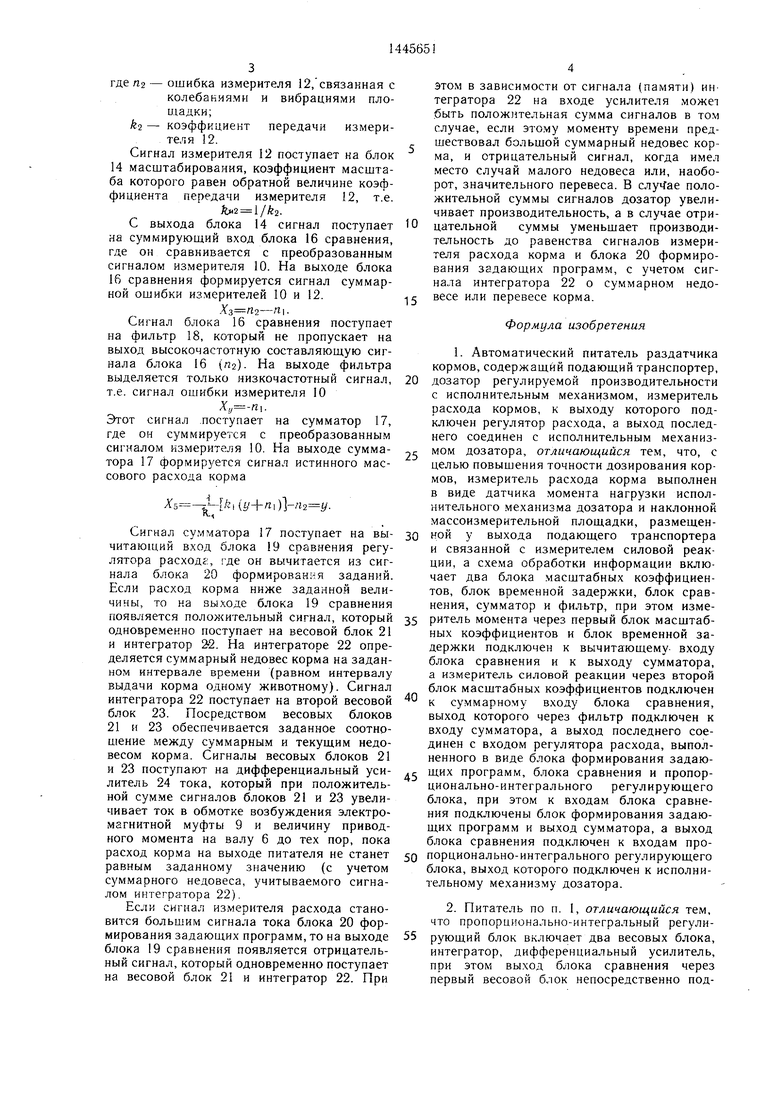
На чертеже представлена схема автоматического питателя раздатчика кормов, монтируемого на тракторе (не показан).
Устройство включает бункер 1 с кормом 2. Днищем бункера является продольный поТрактор, транспортирующий раздатчик, перемещается вдоль ряда кормушек, в которые питатель выдает заданные дозы корма. Скорость движения трактора всегда постоянна, что позволяет формировать во времени задающую программу расходов кормов. Эта программа заносится в блок 20 формирования программ, который на выходе через равномерные промежутки времени ступенчатым образом изменяет напряжение,
разом реализуется раздача кормов по индивидуальным дозам для отдельных животных.
При движении раздатчика вдоль фронту 9 передает приводной момент на продольный транспортер 3 и битеры 4. При этом продольный транспортер 3 перемещает всю массу корма 2 вдоль бункера 1 к битерам 4, которые вычесывают отдельдающий транспортер 3. На выходе бункера 0 являющееся задающим сигналом. Таким об- 1 в его разгрузочной части вертикально один над другим расположены пальцевые битеры 4. Под битерами 4 установлен поперечный подающий транспортер 5, который
подает корм непосредственно в кормушки та кормушек ВОМ 7 трактора через муф- (не показаны). Привод продольного транспортера 3 и битеров 4 осуществляется от приводного вала 6, соединенного с валом 7 отбора мощности (ВОМ) трактора. Для этого битеры 4 и продольный транспортер
3связаны между собой цепной передачей 8. 20 ные порции корма из всего слоя и сбраМежду приводным валом б и ВОМ 7 сывают их на поперечный подающий транс- установлена моментная электромагнитнаяпортер 5. Подающий транспортер 5, объепорошковая муфта 9. Кроме того, на при-диняя отдельные порции, вычесываемые биводном валу 6 установлен измеритель 10 терами, сбрасывает поток корма ка наклон- момента. Бункер 1, транспортер 3, битеры 5 У массоизмерительную площадку И.
4и система привода 6-9 образуют дозатор
раздатчика кормов. На выходе подающегоПри перемещении корма 2 продольтранспортера 5 установлена наклоннаяным транспортером 3 и работе битеров
массоизмерительная площадка 11, обору.по-4 на приводном валу возникает момент
ванная измерителем 12 силовой реакции.сопротивления, пропорциональный объему
Измерители 10 и 12 подключены к бло- о орма в бункере 1, его плотности и подаче
кам 13 и 14 масштабирования сигналов соответственно. При этом блок 13 масштабирования подключен к блоку 15 временной задержки, выход которого подключен к вычитающему входу блока 16 сравнения
транспортера 3 и битеров 4. Эти факторы определяют массовый расход корма на выходе дозатора питателя. Поэтму сигнал измерителя 10 мощности содержит информацию о массовом расходе. Этот сигнал может
и входу сумматора 17. Измеритель 12 сило- 35 SjiTb представлен в следующем виде:
X ,ki(y+nt:
вой реакции подключен к суммирующему входу блока 16 сравнения, выход которого через фильтр 18 соединен с входом сумматора 17.
Измерители 10 и 12 и блоки 13-18 образуют датчики расхода кормов, а выход сумматора 17 является выходом датчика расхода и подключен к вычитающему входу блока 19 сравнения. К суммирующему входу блока 19 подключен блок 20 формирования задающих программ. Выход блока 19 сравнения соединен с первым весовым блоком 21 и интегратором 22, а выход интегратора - с вторым весовым блоком
24,выход которого соединен с обмоткой возбуждения электромагнитной муфты 9.
Блоки 19-24 образуют регулятор расхода корма, а -выход дифференциального усилителя 24 является выходом регулятора расхода. Блоки 21-24 образуют пропорционально-интегральный регулирую1ций блок 25.
Авторматический питатель раздатчика кормов работает следующим образом.
Трактор, транспортирующий раздатчик, перемещается вдоль ряда кормушек, в которые питатель выдает заданные дозы корма. Скорость движения трактора всегда постоянна, что позволяет формировать во времени задающую программу расходов кормов. Эта программа заносится в блок 20 формирования программ, который на выходе через равномерные промежутки времени ступенчатым образом изменяет напряжение,
являющееся задающим сигналом. Таким об-
разом реализуется раздача кормов по индивидуальным дозам для отдельных животных.
При движении раздатчика вдоль фрон являющееся задающим сигналом. Таким об-
та кормушек ВОМ 7 трактора через муф-
ту 9 передает приводной момент на продольный транспортер 3 и битеры 4. При этом продольный транспортер 3 перемещает всю массу корма 2 вдоль бункера 1 к битерам 4, которые вычесывают отдельта кормушек ВОМ 7 трактора через муф-
орма в бункере 1, его плотности и подаче
транспортера 3 и битеров 4. Эти факторы определяют массовый расход корма на выходе дозатора питателя. Поэтму сигнал измерителя 10 мощности содержит информацию о массовом расходе. Этот сигнал может
SjiTb представлен в следующем виде:
X ,ki(y+nt:
где у - истинный массовый расход дозатора;
«I -- ошибка измерителя 10, связанная с наличием трения, упругости и других причин;
k - коэффициент передачи измерителя 10.
Сигнал измерителя поступает на блок 13 масштабирования, имеющий коэффициент масштаба, равный обратной величине коэффициента передачи измерителя, т.е.
/feMi l/ |.
Сигнал с выхода блока 13 поступает на блок 15 временной задержки, интервал заданий которого равен времени прохождения корма по подающему транспортеру 5. С выхода блока 15 сигнал поступает на вычитающий вход блока 16 сравнения и вход сумматора 17.
Одновременно измерителем 12 измеряется
силовая реакция массоизмерительной площадки 11. Сигнал этого измерителя может быть представлен в следующем виде: X : k2{y- -n2),
где П2 - ошибка измерителя 12, связакная с колебаниями и вибрациями площадки;
2 - коэффициент передачи измерителя 12.
Сигнал измерителя 12 поступает на блок 14 масштабирования, коэффициент масштаба которого равен обратной величине коэффициента передачи измерителя 12, т.е.
Ы .
С выхода блока 14 сигнал поступает на суммирующий вход блока 16 сравнения, где он сравнивается с преобразованным сигналом измерителя 10. На выходе блока 16 сравнения формируется сигнал суммарной ошибки измерителей 10 и 12.
Хз П-2-П.
Сигнал блока 16 сравнения поступает на фильтр 18, который не пропускает на выход высокочастотную составляющую сигнала блока 16 (пу). На выходе фильтра выделяется только низкочастотный сигнал, т.е. сигнал ошибки измерителя 10
.
Этот сигнал .поступает на сумматор 17, где он суммируется с преобразованным сигналом измерителя 10. На выходе сумма- тора 17 формируется сигнал истинного массового расхода корма
(у+П1). к.,
Сигнал сумматора 17 поступает на вы- читающий вход блока 9 сравнения регулятора расходе, где он вычитается из сигнала блока 20 формирования заданий. Если расход корма ниже заданной величины, то на выходе блока 19 сравнения появляется положительный сигнал, который одновременно поступает на весовой блок 21 и интегратор 2-2. На интеграторе 22 определяется суммарный недовес корма на заданном интервале времени (равном интервалу выдачи корма одному животному). Сигнал интегратора 22 поступает на второй весовой блок 23. Посредством весовых блоков 21 н 23 обеспечивается заданное соотношение между суммарным и текущим недовесом корма. Сигналы весовых блоков 21 и 23 поступают на дифференциальный уси- литель 24 тока, который при положительной сумме сигналов блоков 21 и 23 увеличивает ток в обмотке возбуждения электромагнитной муфты 9 и величину приводного момента на валу 6 до тех пор, пока расход корма на выходе питателя не станет равным заданному значению (с учетом суммарного недовеса, учитываемого сигналом интегратора 22).
Если сигнал измерителя расхода становится большим сигнала тока блока 20 формирования задающих программ, то на выходе блока 19 сравнения появляется отрицательный сигнал, который одновременно поступает на весовой блок 21 и интегратор 22. При
Этом в зависимости от сигнала (памяти) интегратора 22 на входе усилителя может быть полож1 тельная сумма сигналов в том случае, если этому моменту времени предшествовал большой суммарный недовес корма, и отрицательный сигнал, когда имел место случай малого недовеса или, наоборот, значительного перевеса. В слу11 ае положительной суммы сигналов дозатор увеличивает производительность, а в случае отрицательной суммы уменьшает производительность до равенства сигналов измерителя расхода корма и блока 20 формирования задающих программ, с учетом сигнала интегратора 22 о суммарном недовесе или перевесе корма.
Формула изобретения
56
ключей к одному из входов дифференци-рому входу дифференциального усилителя,
ального усилителя и одновременно черезвыход которого связан с исполнительным
интегратор и второй весовой блок - к вто-механизмом дозатора.
| Автоматический дозатор кормов впОТОКЕ | 1978 |
|
SU818570A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
