4;:
ю
сг
00 4
оо
66
Фиг.}
Изобретение относится к оборудованию для полиграфической промышленности, а именно к транспортирующим устройствам поточных линий брошюровочно-переплетно- го производства.
Цель изобретения - повышение производительности.
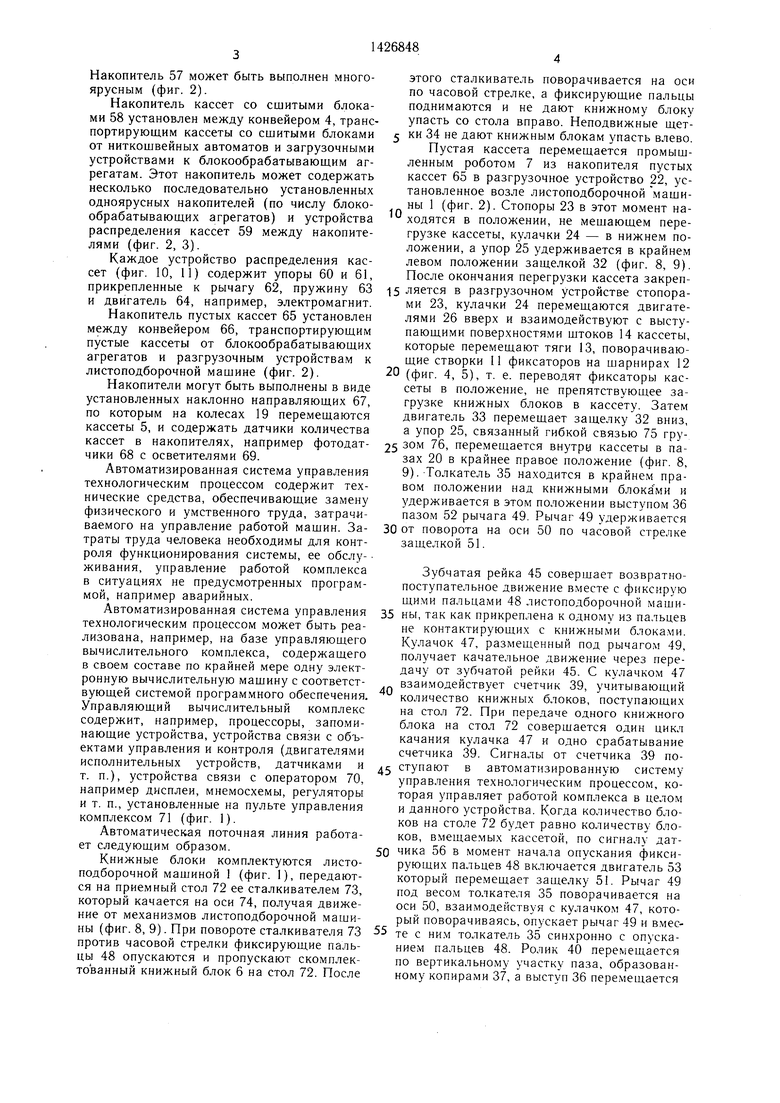
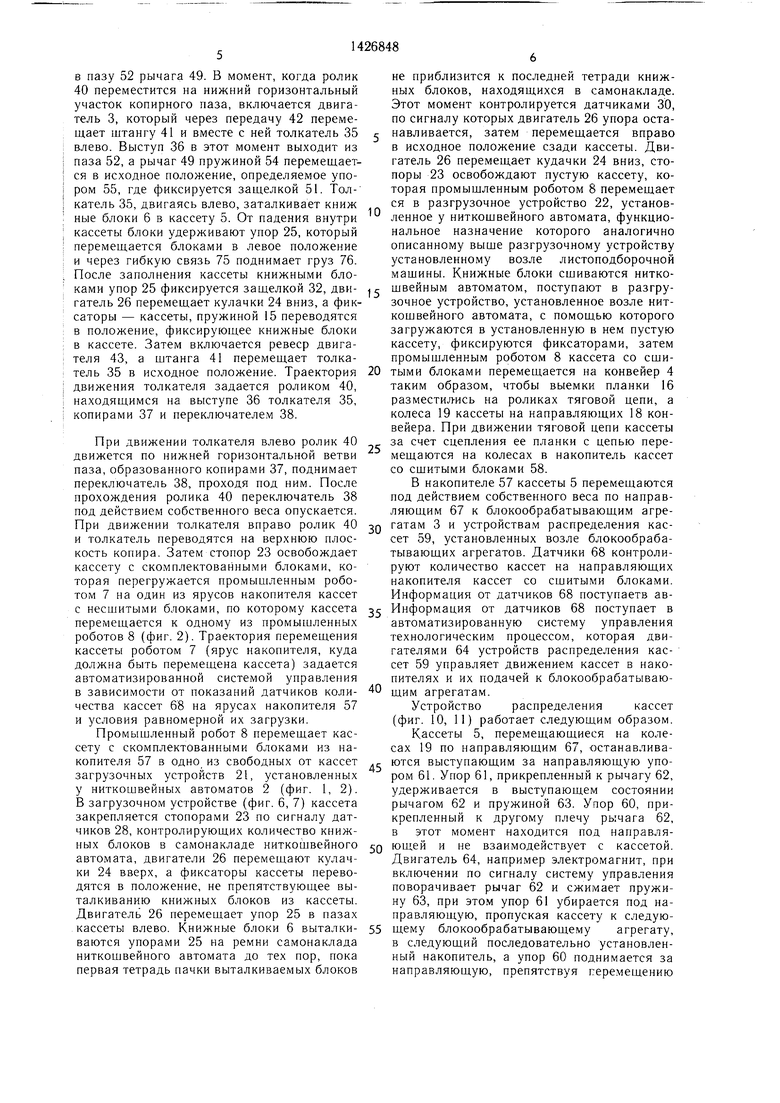
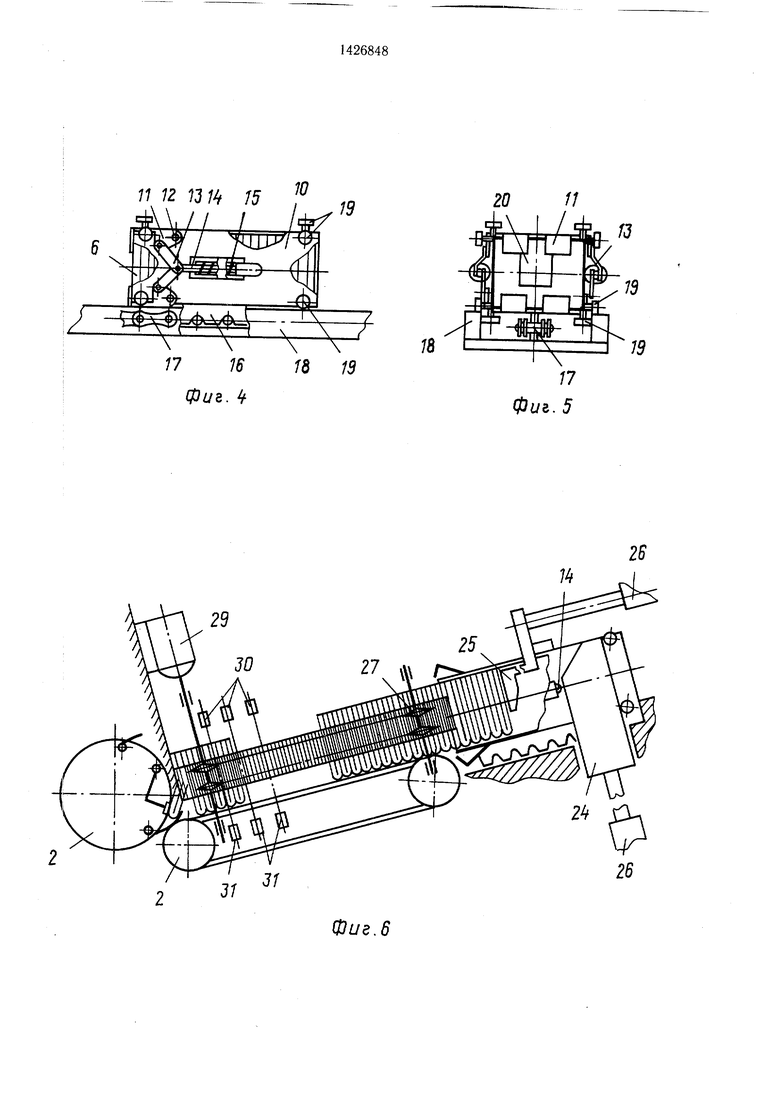
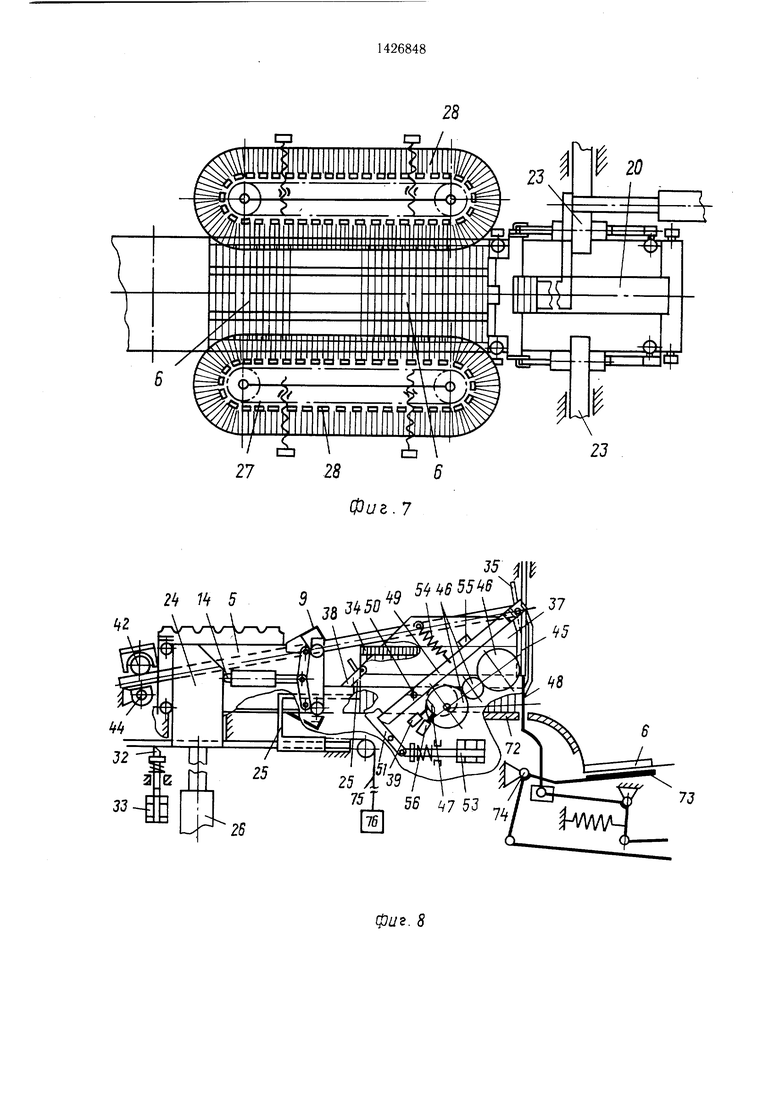
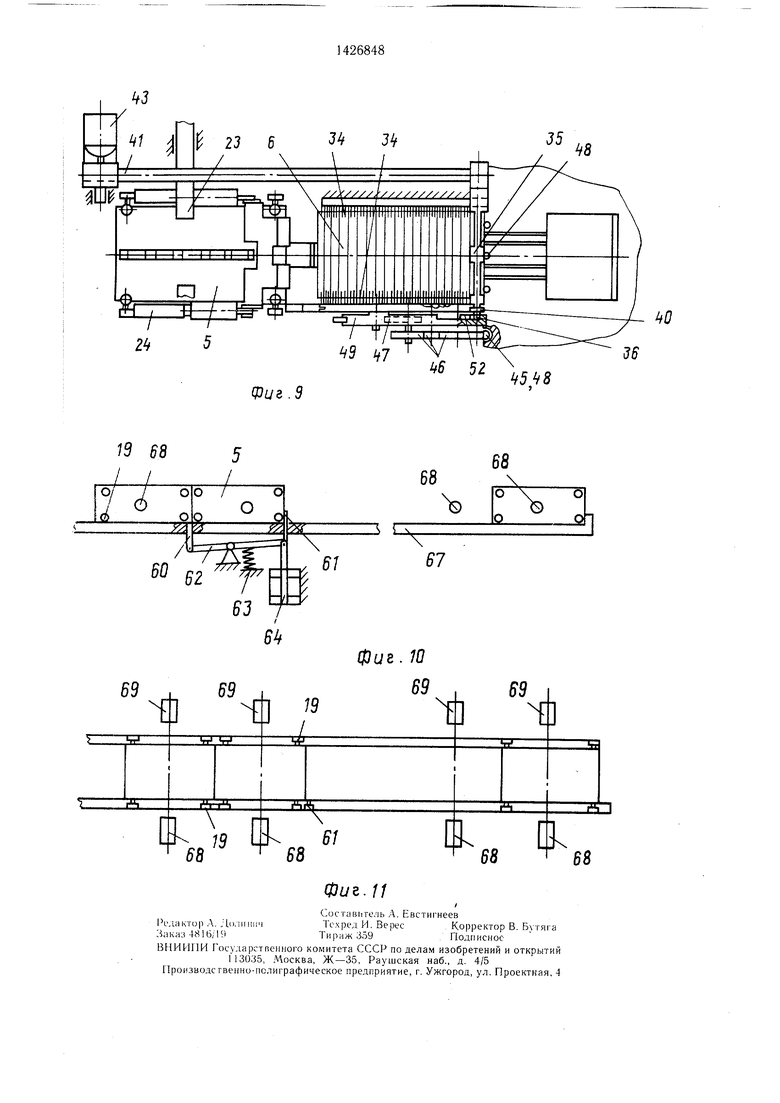
На фиг. 1 изображена автоматическая поточная линия для изготовления книжных блоков, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на :фиг. 4 - кассета с книжными блоками при транспортировке ее цепным конвейером; на фиг. 5 - то же, вид слева; на фиг. б - загрузочное устройство у ниткощвейного автомата; на (|)иг. 7 - то же, вид сверху; на фиг. 8 - разгрузочное устройство у листо- подборочной машины; на фиг. 9 - то же, вид сверху; на фиг. 10 - устройство распределения кассет между накопителями; :на фиг. 11 - то же, вид сверху.
Загрузочное устройство (фиг. 6, 7), кроме стопоров 23, кулачков 24 и упоров 25, содержит транспортеры 27 цепные с прикрепленными к ним щетками 28, взаимодействую- , щими с боковыми поверхностями книжных блоков. Транспортеры 27 могут приводиться в движение двигателями 29 или могут быть связаны с приводами самонакладов технологического оборудования.
Загрузочные устройства содержат также 10 датчики 30, например фотодатчики с осветителями 31, контролирующие количество книжных блоков в самонакладах технологического оборудования.
Разгрузочное устройство 22, установлен- . ное у листоцодборочной мащины (фиг. 8, 9), кроме стопоров 23, кулачков 24, упоров 25 и двигателей 26, содержит устройство формирования книжных блоков с толкателями, устройство синхронизации движения механизмов технологического оборудования, наАвтоматическая поточная линия для изго- 20 пример листоподборочной машины, с дви25
товления книжных блоков (фиг. 1, 2 и 3) Додержит технологическое оборудование, обрабатывающее книжные блоки, т. е. лис- топодборочную машину 1, ниткошвейные автоматы 2, блокообрабатывающие агрегаты 3, и транспортное оборудование; конвейеры 4 с кассетами 5 для транспортировки книжных блоков 6, и промышленные роботы 7, 8, 9, перегружающие кассеты.
Каждая кассета (фиг. 4, 5) содержит корпус 10, выполненный в виде короба с отсутствующей задней торцовой стенкой, со стороны которой прикреплены фиксаторы книжных блоков, выполненные в виде створок 11, прикрепленных с помощью шарниров 12 к боковым стенкам корпуса кассеты. Створки 11 связаны тягами 13 со штоками 14, -, подпружиненными относительно корпуса пружинами 15. К наружной поверхности дна корпуса кассеты прикреплена планка 16 с выемками под втулки транспортной цепи 17, например втулочно-роликовой. Конвейер 4 содержит транспортную цепь 17, размещенную между направляющими 18, по которым :на колесах 19 перемещаются кассеты 5. В верхней и передней торцовых стенках кассеты могут быть выполнены пазы 20.
жением толкателей, защелку 32 упора, связанную с двигателем 33, например, электромагнитом.
Устройство формирования пачек книжных блоков содержит неподвижные щетки 34, взаимодействующие с боковыми поверхностями книжных блоков, толкатель 35 книжных блоков с выступом 36, копиры 37 с переключателем 38 и счетчик 39. Выступ 36 для уменьшения трения может быть снабжен .,., роликом 40.
Толкатель 35 прикреплен к штанге 41 с нарезанными на ней зубьями, которая через зубчатую передачу 42 связана с двигателем 43. Штанга имеет возможность качаться на оси 44.
Устройство синхронизации движения толкателей с движением механизмов технологического оборудования (листоподборочной машины) содержит зубчатую рейку 45, связанную зубчатыми колесами 46 с кулачком 47. Зубчатая рейка 45 связана с меха- 40 низмами листоподборочной машины, например прикреплена к фиксирующему пальцу 48 листоподборочной машины. Рычаг 49 установлен на оси 50 с возможностью взаимодействия с кулачком 47 и защелкой 51. В рычаге имеется паз 52 для размещения выступа 36 толкателя. Защелка 51 связана с двигателем 53, например, электромагнитом К рычагу 49 прикреплена пружина 54. Упор 55 взаимодействует с рычагом, ограничивая его перемещение. Датчик 56 установлен CQ в устройство с возможностью взаимодействия с кулачком 47.
У входов технологического оборудования установлены загрузочные 21 (фиг. 6, 7), а у его выходов разгрузочные 22 (фиг. 8, 9) устройства, содержащие стопоры 23 для закрепления кассет, кулачки 24 для взаимодействия со штоками фиксаторов и упоры 25 для подачи книжных блоков из кассет в самонаклады технологического оборудования и удержания книжных блоков от падения внутри кассет при их загрузке. Кулачки, -стопоры и упоры приводятся в движение двигателями 26, например пневмоцилинд- рами, электромагнитами и т. п. Упоры 25 имеют возможность перемещаться внутри кассет в пазах 20.
Загрузочное устройство (фиг. 6, 7), кроме стопоров 23, кулачков 24 и упоров 25, содержит транспортеры 27 цепные с прикрепленными к ним щетками 28, взаимодействую- щими с боковыми поверхностями книжных блоков. Транспортеры 27 могут приводиться в движение двигателями 29 или могут быть связаны с приводами самонакладов технологического оборудования.
Загрузочные устройства содержат также 0 датчики 30, например фотодатчики с осветителями 31, контролирующие количество книжных блоков в самонакладах технологического оборудования.
Разгрузочное устройство 22, установлен- ное у листоцодборочной мащины (фиг. 8, 9), кроме стопоров 23, кулачков 24, упоров 25 и двигателей 26, содержит устройство формирования книжных блоков с толкателями, устройство синхронизации движения механизмов технологического оборудования, на5
жением толкателей, защелку 32 упора, связанную с двигателем 33, например, электромагнитом.
Устройство формирования пачек книжных блоков содержит неподвижные щетки 34, взаимодействующие с боковыми поверхностями книжных блоков, толкатель 35 книжных блоков с выступом 36, копиры 37 с переключателем 38 и счетчик 39. Выступ 36 для уменьшения трения может быть снабжен ., роликом 40.
Толкатель 35 прикреплен к штанге 41 с нарезанными на ней зубьями, которая через зубчатую передачу 42 связана с двигателем 43. Штанга имеет возможность качаться на оси 44.
Устройство синхронизации движения толкателей с движением механизмов технологического оборудования (листоподборочной машины) содержит зубчатую рейку 45, связанную зубчатыми колесами 46 с кулачком 47. Зубчатая рейка 45 связана с меха- 0 низмами листоподборочной машины, например прикреплена к фиксирующему пальцу 48 листоподборочной машины. Рычаг 49 установлен на оси 50 с возможностью взаимодействия с кулачком 47 и защелкой 51. В рычаге имеется паз 52 для размещения выступа 36 толкателя. Защелка 51 связана с двигателем 53, например, электромагнитом К рычагу 49 прикреплена пружина 54. Упор 55 взаимодействует с рычагом, ограничивая его перемещение. Датчик 56 установлен Q в устройство с возможностью взаимодействия с кулачком 47.
Накопители кассет выполняют функции буферных устройств, сглаживающих нарушения ритма работы технологического и транспортного оборудования.
Накопитель кассет с несшитыми блоками 57 установлен между разгрузочным устройством к листоподборочной мащине и загрузочными к ниткошвейным автоматам.
5
5
Накопитель 57 может быть выполнен многоярусным (фиг. 2).
Накопитель кассет со сшитыми блоками 58 установлен между конвейером 4, транспортирующим кассеты со сшитыми блоками от ниткошвейных автоматов и загрузочными устройствами к блокообрабатывающим агрегатам. Этот накопитель может содержать несколько последовательно установленных одноярусных накопителей (по числу блоко- обрабатывающих агрегатов) и устройства распределения кассет 59 между накопителями (фиг. 2, 3).
Каждое устройство распределения кассет (фиг. 10, 11) содержит упоры 60 и 61, прикрепленные к рычагу 62, пружину 63 и двигатель 64, например, электромагнит.
Накопитель пустых кассет 65 установлен между конвейером 66, транспортирующим пустые кассеты от блокообрабатывающих агрегатов и разгрузочным устройствам к листоподборочной машине (фиг. 2).
Накопители могут быть выполнены в виде установленных наклонно направляющих 67, по которым на колесах 19 перемещаются кассеты 5, и содержать датчики количества кассет в накопителях, например фотодатчики 68 с осветителями 69.
Автоматизированная система управления технологическим процессом содержит технические средства, обеспечивающие замену физического и умственного труда, затрачиваемого на управление работой машин. Затраты труда человека необходимы для контроля функционирования системы, ее обслу- живания, управление работой комплекса в ситуациях не предусмотренных программой, например аварийных.
Автоматизированная система управления технологическим процессом может быть реализована, например, на базе управляющего вычислительного комплекса, содержащего в своем составе по крайней мере одну электронную вычислительную машину с соответствующей системой программного обеспечения. Управляющий вычислительный комплекс содержит, например, процессоры, запоминающие устройства, устройства связи с объектами управления и контроля (двигателями исполнительных устройств, датчиками и т. п.), устройства связи с оператором 70, например дисплеи, мнемосхемы, регуляторы и т. п., установленные на пульте управления комплексом 71 (фиг. 1).
Автоматическая поточная линия работает следующим образом.
Книжные блоки комплектуются листоподборочной машиной 1 (фиг. I), передаются на приемный стол 72 ее сталкивателем 73, который качается на оси 74, получая движение от механизмов листоподборочной машины (фиг. 8, 9). При повороте сталкивателя 73 против часовой стрелки фиксирующие пальцы 48 опускаются и пропускают скомплектованный книжный блок 6 на стол 72. После
этого сталкиватель поворачивается на оси по часовой стрелке, а фиксирующие пальцы поднимаются и не дают книжному блоку упасть со стола вправо. Неподвижные щет- 5 ки 34 не дают книжным блокам упасть влево. Пустая кассета перемещается промыщ- ленным роботом 7 из накопителя пустых кассет 65 в разгрузочное устройство 22, установленное возле листоподборочной мащи- ны 1 (фиг. 2). Стопоры 23 в этот момент на ходятся в положении, не мешающем перегрузке кассеты, кулачки 24 - в нижнем положении, а упор 25 удерживается в крайнем левом положении защелкой 32 (фиг. 8, 9). После окончания перегрузки кассета закреп|5 ляется в разгрузочном устройстве стопорами 23, кулачки 24 перемещаются двигателями 26 вверх и взаимодействуют с высту- паюшими поверхностями штоков 14 кассеты, которые перемещают тяги 13, поворачивающие створки 11 фиксаторов на шарнирах 12
0 (фиг. 4, 5), т. е. переводят фиксаторы кассеты в положение, не препятствующее загрузке книжных блоков в кассету. Затем двигатель 33 перемещает защелку 32 вниз, а упор 25, связанный гибкой связью 75 гру5 зом 76, перемещается внутри кассеты в пазах 20 в крайнее правое положение (фиг. 8, 9). Толкатель 35 находится в крайнем правом положении над книжными блока ми и удерживается в этом положении выступом 36 пазом 52 рычага 49. Рычаг 49 удерживается
0 от поворота на оси 50 по часовой стрелке защелкой 51.
Зубчатая рейка 45 совершает возвратно- поступательное движение вместе с фиксирую щими пальцами 48 листоподборочной маши5 ны, так как прикреплена к одному из пальцев не контактирующих с книжными блоками. Кулачок 47, размещенный под рычагом 49, получает качательное движение через передачу от зубчатой рейки 45. С кулачком 47 взаи.модействует счетчик 39, учитывающий количество книжных блоков, поступающих на стол 72. При передаче одного книжного блока на стол 72 совершается один цикл качания кулачка 47 и одно срабатывание счетчика 39. Сигналы от счетчика 39 по5 ступают в автоматизированную систему управления технологическим процессом, которая управляет работой комплекса в целом и данного устройства. Когда количество блоков на столе 72 будет равно количеству блоков, вмещаемых кассетой, по сигналу дат0 чика 56 в момент начала опускания фиксирующих пальцев 48 включается двигатель 53 который перемещает защелку 51. Рычаг 49 под весом толкателя 35 поворачивается на оси 50, взаимодействуя с кулачком 47, который поворачиваясь, опускает рычаг 49 и вмес5 7е с ни.м толкатель 35 синхронно с опусканием пальцев 48. Ролик 40 перемещается по вертикальному участку паза, образованному копирами 37, а выступ 36 перемещается
0
в пазу 52 рычага 49. В момент, когда ролик 40 переместится па нижний горизонтальный участок копирного паза, включается двигатель 3, который через передачу 42 перемещает штапгу 41 и вместе с ней толкатель 35 влево. Выступ 36 в этот момент выходит из паза 52, а рычаг 49 пружиной 54 перемещается в исходное положение, определяемое упором 55, где фиксируется защелкой 51. Тол- катель 35, двигаясь влево, заталкивает книж ные блоки 6 в кассету 5. От падения внутри кассеты блоки удерживают упор 25, который перемещается блоками в левое положение и через гибкую связь 75 поднимает груз 76. После заполнения кассеты книжными блоками упор 25 фиксируется защелкой 32, двигатель 26 перемещает кулачки 24 вниз, а фиксаторы - кассеты, пружиной 15 переводятся в положение, фиксирующее книжные блоки в кассете. Затем включается ревеср двигателя 43, а щтанга 41 перемещает толкатель 35 в исходное положение. Траектория движения толкателя задается роликом 40, находящимся на выступе 36 толкателя 35, копирами 37 и переключателем 38.
При движении толкателя влево ролик 40 движется по нижней горизонтальной ветви паза, образованного копирами 37, поднимает переключатель 38, проходя под ним. После прохождения ролика 40 переключатель 38 под действием собственного веса опускается. При движении толкателя вправо ролик 40 и толкатель переводятся на верхнюю плоскость копира. Затем стопор 23 освобождает кассету с скомплектованными блоками, которая перегружается промыщленным роботом 7 на один из ярусов накопителя кассет с несшитыми блоками, по которому кассета перемещается к одному из промыщленных роботов 8 (фиг. 2). Траектория перемещения кассеты роботом 7 (ярус накопителя, куда должна быть перемещена кассета) задается автоматизированной системой управления в зависимости от показаний датчиков количества кассет 68 на ярусах накопителя 57 и условия равномерной их загрузки.
Промыщленный робот 8 перемещает кассету с скомплектованными блоками из накопителя 57 в одно из свободных от кассет загрузочных устройств 21, установленных у ниткошвейных автоматов 2 (фиг. 1, 2). В загрузочном устройстве (фиг. 6, 7) кассета закрепляется стопорами 23 по сигналу датчиков 28, контролирующих количество книжных блоков в самонакладе ниткопшейного автомата, двигатели 26 перемещают кулачки 24 вверх, а фиксаторы кассеты переводятся в положение, не препятствующее выталкиванию книжных блоков из кассеты. Двигатель 26 перемещает упор 25 в пазах кассеты влево. Книжные блоки 6 выталкиваются упорами 25 на ремни самонаклада ниткощвейного автомата до тех пор, пока первая тетрадь пачки выталкиваемых блоков
0
0
5
не приблизится к последней тетради книжных блоков, находящихся в самонакладе. Этот момент контролируется датчиками 30, по сигналу которых двигатель 26 упора останавливается, затем перемещается вправо в исходное положение сзади кассеты. Двигатель 26 перемещает кудачки 24 вниз, стопоры 23 освобождают пустую кассету, которая промыщленным роботом 8 перемещает ся в разгрузочное устройство 22, установленное у ниткощвейного автомата, функциональное назначение которого аналогично описанному выше разгрузочному устройству установленному возле листоподборочной машины. Книжные блоки сщиваются нитко- швейным автоматом, поступают в разгрузочное устройство, установленное возле ниткощвейного автомата, с помощью которого загружаются в установленную в нем пустую кассету, фиксируются фиксаторами, затем промыщленным роботом 8 кассета со сщи- тыми блоками перемещается на конвейер 4 таким образом, чтобы выемки планки 16 разместил-ись на роликах тяговой цепи, а колеса 19 кассеты на направляющих 18 конвейера. При движении тяговой цепи кассеты за счет сцепления ее планки с цепью перемещаются на колесах в накопитель кассет со сшитыми блоками 58.
В накопителе 57 кассеты 5 перемещаются под действием собственного веса по направляющим 67 к блокообрабатывающим агрегатам 3 и устройствам распределения кассет 59, установленных возле блокообраба- тывающих агрегатов. Датчики 68 контролируют количество кассет на направляющих накопителя кассет со сщитыми блоками. Информация от датчиков 68 поступаете ав- 5 Информация от датчиков 68 поступает в автоматизированную систему управления технологическим процессом, которая двигателями 64 устройств распределения кассет 59 управляет движением кассет в накопителях и их подачей к блокообрабатывающим агрегатам.
Устройство распределения кассет (фиг. 10, 11) работает следующим образом.
Кассеты 5, перемещающиеся на колесах 19 по направляющим 67, останавливаются выступающим за направляющую упором 61. Упор 61, прикрепленный к рычагу 62, удерживается в выступающем состоянии рычагом 62 и пружиной 63. Упор 60, прикрепленный к другому плечу рычага 62, в этот момент находится под направляющей и не взаимодействует с кассетой. Двигатель 64, например электромагнит, при включении по сигналу систему управления поворачивает рычаг 62 и сжимает пружину 63, при этом упор 61 убирается под направляющую, пропуская кассету к следующему блокообрабатывающему агрегату, в следующий последовательно установленный накопитель, а упор 60 поднимается за направляющую, препятствуя перемещению
0
0
5
0
5
следующей кассеты. При выключении двигателя 64 пружина 63 перемещает рычаг 62, упоры 60 и 61 в исходное положение, при этом кассета, удерживаемая упором 60, перемещается к упору 61, которым удерживается до следующего срабатывания двигателя 64.
Промышленный робот 9 (фиг. 1, 3) перемещает кассету со сщитыми блоками из накопителя 58 кассет со сщитыми блоками в загрузочное устройство 21 „ установленное возле блокообрабатывающего агрегата, с помощью которого книжные блоки загружаются из кассеты в блокообрабатывающий агрегат. Конструкция и принцип действия этого устройства аналогичны описанному загрузочному устройству к ниткощвейному автомату. Затем пустая кассета перемещается промыщленным роботом 9 на конвейер 66, транспортирующий пустые кассеты к накопителю пустых кассет 65, в котором пустые кассеты перемещаются к листоподборочной машине 1. Конструкция и принцип действия конвейера 66, транспортирующего пустые кассеты, аналогичны конвейеру 4, транспортирующему кассеты со сшитыми блоками.
Формула изобретения
1. Автоматическая поточная линия для изготовления книг, содержащая листопод- борочную и ниткощвейные машины, блоко- обрабатывающие агрегаты, транспортное оборудование для загрузки, разгрузки и транспортировки блоков и систему управления технологическим и транспортным оборудованиями, отличающаяся тем, что, с целью по йышения производительности, транспортное оборудование имеет кассеты с фиксаторами книжных блоков, установленные вдоль
0
ниткошвейных машин, конвейеры для транспортировки кассет и смонтированные над конвейерами наклонные накопители кассет, при этом расположенные у входов и выходов технологического оборудования загрузочные и соответственно разгрузочные устройства содержат стопоры для закрепления кассет, кулачки для взаимодействия с фиксаторами кассет, упоры для удержания и подачи книжных блоков, причем загрузочные устройства содержат транспортеры с закрепленными на них щетками и датчиками количества книжных блоков, а разгрузочные устройства снабжены приспособлениями для формирования пачек книжных блоков, включающими г толкатели книжных блоков, и средствами синхронизации движения толкателей и механизмов технологического оборудования.
2.Линия по п. 1, отличающаяся тем, что накопители кассет снабжены связанными с системой управления датчиками количест0 ва кассет и устройствами распределения кассет.
3.Линия по п. 1, отличающаяся тем, что приспособление для формирования пачек разгрузочного устройства содержит неподвижные щетки, взаимодействующие с толкателем копиры с переключателем и связанный с системой управления счетчик книжных блоков.
4.Линия по п. I, отличающаяся тем, что устройство синхронизации движения толкаQ теля с движением механизмов листоподборочной машины содержит взаимодействующий с толкателем рычаг, взаимодействующий с ним и связанный посредством зубчатой передачи с фиксирующими пальцами листоподборочной машины кулачок и кон5 тактирующую с рычагом защелку с электромагнитом, связанным с системой управления.
Изобретение относится к оборудованию для полиграфической промышленности а именно к транспортирующим устройствам поточных линий брошюровочно-переплет- ного производства. Цель изобретения - повышение производительности. Книжные блоки 6, обработанные листоподборочной машиной 1, поступают в разгрузочное устройство, где загружаются в кассету 5. Промышленный робот 7 перемещает пустые кассеты из накопителя пустых кассет 65 к лис- топодборочной машине 1, а кассеты с блоками - в накопитель 4, откуда другой робот 8 перемещает их в расположение у нит- кошвейных автоматов 2 загрузочные устройства. Сшитые блоки поступают в разгрузочные устройства, где опять загружаются в кассеты. Далее кассеты по транспортеру поступают к блокообрабатываюп им агрегатам 3. Кассеты имеют жесткий корпус для размещения книжных блоков и фиксатора. Разгрузочные и загрузочные устройства имеют стопоры для закрепления кассет, кулачки для взаимодействия с фиксаторами, упоры для удержания блоков в кассетах. Технологическим процессом управляет автоматизированная система управления. 3 з. п. ф-лы, 11 ил. (Л
22 5 2f 65 22 8
фиг. 2
58 9
Фиг. J
11 12 73 /4 Г5
Ю
Фиг.6
18
26
2 1 5
2
33
23
Фиг. 7
37
24
Фиг. 9
13 S8
I I
Фиг. //
Pe.liiKTup Л. Ло.шнич Зпказ 4816; 19
Составитель A. Евстигнеев Техред И. ВересКорректор В.
Тираж 359Подписное
ВНИИПИ Государственного комитета СССР поделай изобретений и открытий
113035, А осква, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
35
8
0
6 52
36
68
68
| Ананьина Е | |||
| В | |||
| и др | |||
| Машины брошю- ровочно-переплетного оборудования | |||
| М., 1975, с | |||
| Искусственный двухслойный мельничный жернов | 1921 |
|
SU217A1 |
