4 ГС
sj
СА:
Изобретение относится к области вычислительной техники и может быть использовано при полунатурном моделировании сложных динамических систем, технологических процессов и т.п. совместно с системами управления.
Цель изобретения - повышение точности моделирования.
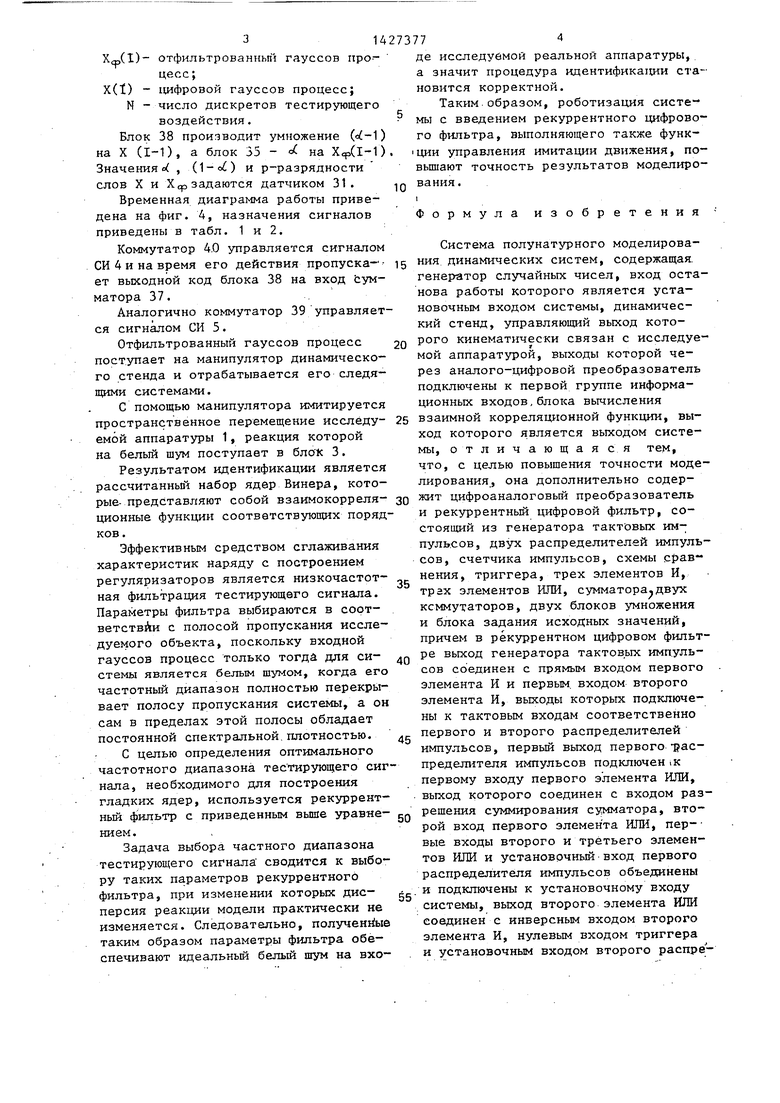
На фиг. 1 представлена блок-схема системы; на фиг. 2, 3 - схема рекуррентного цифрового фильтра; на фиг.4 временная диагра ма работы.
Система (фиг.1) содержит исследуемую аппаратуру 1, аналого-цифровой преобразователь (АЦП) 2, блок 3 вычисления взаимной корреляционной функ 1ЩИ, генератор 4 случайных чисел, рекуррентный цифровой фильтр 5, динамический стенд 6, выполненньй в виде манипулятора с шестью степенями свободы, цифроаналоговый преобразователь 7, установочный вход 8, связи 9-11 между элементами уст4)ойства, вход 12 запуска, выход 13. В состав рекур- рентного цифрового фильтра 5 входят связи 14-22 ме5Вду элементами, генера- тор 23 тактовых импульсов, второй элемент ИЛИ 24, третий элемент И 25, триггер 26, первый элемент И 27, вто- рой элемент И 28, первый 29 и второй 30 распределители импульсов, блок 31 задания исходных данных, третий элемент ИЛИ 32, счетчик 33 импульсов, схема 34 сравнения, первый блок 35 умножения, первый элемент ИЛИ 36,сум- матор 37, второй блок 38 умножения, первый 39 и второй 40 коммутаторы.
В качестве блока вычисления взаимной корреляционной, функции может быть использовано любое устройство, решаю- щев данную задачу.
В качестве манипулятора 6 может быть использован, например, робот фирмы Юнимейт, имеющий шесть осей движения и работающий в сферической системе координат, включающий пять Гидравлических приводов, выходы которых кинематически связаны с входами исполнительного механизма.
В системе производится идентификация блоков исследуемой аппаратуры 1.
В качестве тестирующего воздействия на аппаратуру 1, а также входного воздействия на стенд 6 выбирается
белый гауссов процесс, который вырабатывается генератором 4.
Для получения ограниченной полосы тестирующего сигнала гауссов процесс
пропускается через фильтр 5, который также осуществляет управляющие функции модуля.
Система работает следующим образом.
Перед началом работы сигналом, поступающим с входа 8, устанавливается исходное состояние. Затем сигналом с входа 12 запускается генератор 23 тактовых импульсов, который вырабатывает и вьщает тактовые импульсы в течение времени, определяемом длительностью сигнала запуска. Тактовые импульсы генератора 23 поступают через элемент И 27 на запуск распределителя 29 и через элемент И 28 на запуск распределителя 30, которые формируют сигналы, управляющи.е работой системы. Причем при формиро- вании и вьщаче фильтром 5 кода одного сл ова (числа Хф ) распределитель 29 проходит один период своей работы а распределитель 30 - р периодов. Поэтому при вьщаче N слов длительность сигнала запуска должны быть
- Т Nt (7 + Зр),
где to - период повторения частоты генератора 23 тактовых импульсов .
Первоначально выходной сигнал триггера 26 является разрешающим для запуска распределителя 29 и запрещающим для запуска распределителя 30. Распределитель 29 поочередно формирует первые три сигнала на своих выходах. Сигналом с четвертого выхода запускается триггер 26, кото- рьш блокирует дальнейший запуск распределителя 29 и разрешает запуск распределителя -30, который последовательно проходит р циклов. Число циклов фиксируется счетчиком 33 и при достижении значения р срабатывает схма сравнения. Сигналом с ее выхода онуляется триггер -26, блокирующий запуск .распределителя 30 и разрешающий дальнейший запуск распределителя 29. Сигналом СИ 1 запускается генератор 4, формирующий гауссов процесс X, ко торьй обрабатывается рекуррентным цировым фильтром 5 по закону:
Хф(1) а(Х(1-1) + (1-о() X (1-1).
f
где I - номер дискрета;
С - параметр фильтра, О с с/ 1
Xcp(I)- отфильтрованньп гауссов про-
цесс;
Х(1) - цифровой гауссов процесс; N - число дискретов тестирующего
воздействия,
Блок 38 производит умножение (о{-1) на X (1-1), а блок 35 - : на Хср(1-1) Значения в( , (1-oi) и р-разрядности слов X и Хср задаются датчиком 31.
Временная диаграмма работы приведена на фиг. 4, назначения сигналов приведены в табл. 1 и 2.
Коммутатор 4.0 управляется сигналом СИ 4 и на время его действия пропуска-- ет выходной код блока 38 на вход Ьум- матора 37.
Аналогично коммутатор 39 управляется сигналом СИ 5.
Отфильтрованный гауссов процесс поступает на манипулятор динамического стенда и отрабатывается его следящими системами.
С помощью манипулятора имитируется пространственное перемещение исслёду- емой аппаратуры 1, реакция которой на бельй шум поступает в блок 3.
Результатом идентификации является paccчитaнньtf набор ядер Винера, которые- представляют собой взаимокорреля- ционные функции соответствующих порядков.
Эффективным средством сглаживания характеристик наряду с построением регуляризаторов является низкочастот- ная фильтрация тестирующего сигнала. Параметры фильтра выбираются в соответствии с полосой пропускания исследуемого объекта, поскольку входной гауссов процесс только тогда для си- стемы является белым шумом, когда его частотный диапазон полностью перекрывает полосу пропускания системы, а он сам в пределах этой полосы обладает постоянной спектральной.плотностью.
С целью определения оптимального частотного диапазона тес тирующего сигнала, необходимого для построения гладких ядер, используется рекуррентный фильтр с приведенным выше уравне- нием.
Задача выбора частного диапазона тестирующего сигнала сводится к выбору таких параметров рекуррентного фильтра, при изменении которых дис- Персия реакции модели практически не изменяется. Следовательно, полученные таким образом параметры фильтра обеспечивают идеальный белый шум на вхо-
Q
5
0
5
о
Q
g
g
5
де исследуемой реальной аппаратуры, а значит процедура идентификацией становится корректной.
Таким.образом, роботизация системы с введением рекуррентного цифрового фильтра, выполняющего также функ- 1ЦИИ управления имитации движения, по- вьшают точность результатов моделирования. I
Формула изобретения
Система полунатурного моделирования динамических систем, содержащая, генератор случайных чисел, вход останова работы которого является установочным входом системы, динамический стенд, управляющий выход которого кинематически связан с исследуемой аппаратурой, выходы которой через аналого-цифровой преобразователь подключены к первой группе информационных входов,блока вычисления взаимной корреляционной функции, выход которого является выходом системы, отличающаяся тем, что, с целью повышения точности моделирования, она дополнительно содержит цифроаналоговый преобразователь и рекуррентный цифровой фильтр, состоящий из генератора такт овых импульсов, двух распределителей импульсов, счетчика импульсов, схемы сравнения, триггера, трех элементов И, трах элементов ИЛИ, сумматора.двух коммутаторов, двух блоков умножения и блока задания исходных значений, причем в рекуррентном цифровом фильтре выход генератора тактов.ых импульсов соединен с прямым входом первого элемента И и первым, входом второго элемента И, выходы которых подключены к тактовым входам соответственно первого и второго распределителей импульсов, первый выход первого -распределителя импульсов подключен IK первому входу первого элемента ИЛИ, выход которого соединен с входом разрешения суммирования сумматора, второй вход первого элемента ИЛИ, пер- вые входы второго и третьего элементов ИЛИ и установочный вход первого распределителя импульсов объединены и подключены к установочному входу системы, выход второго элемента ИЛИ соединен с инверсным входом второго элемента И, нулевым входом триггера и установочным входом второго распре10
15
51427377
делителя импульсов, первьш выход кото- выход рого соединен с входами записи мно- йсимого первого и второго блоков умножения, входы сдвига множителя которых подключены к второму выходу второго распределителя импульсов, третий вьпсод которого соединен со счетным входом счетчика импульсов, разрядные выходы которого подключены соответственно к информационным входам первой группы схемы сравнения, информационные входы второй группы которой подключены соответственно к выходам первой группы блока задания исходньпс значений, выходы второй и третьей групп которого подключены соответственно к информационным входам первой группы соответствейно первого и второго блоков умножения, выходы которых соединены с информационными входами соответственно первого и второго коммутаторов, выходы которых соединены с информационными входами соответственно первой и рой групп сумматоров, выходы которого подключены соответственно к- инфор- мационньм входам второй группы первого блока умножения, установочные входы первого и второго блоков, умножения подключены к выходу первого элемента ИЖ, а информационные входы второй, группы второго блока умножения соединены соответственно с выхопервого распределителя импульсов соединен с входами записи инфopмa ции первого и второго блоков умножения, четвертый вьпсод первого распределителя импульсов подключен к прямому входу третьего элемента И, Ьыход которого соединен с единичным входом триггера, прямой выход которого подключен к инверсному входу первого элемента И и второму входу второго элемента И, четвертый выход первого распределителя импульсов соединен с управляющим входом второго коммутатора и вторым входом третьего элемента ИЛИ, вь1ход которого подключен к установочному входу счетчика импульсов, шестой выход первого распределителя импульсов соединен с управляю20 Щим входом первого коммутатора, выход Равно схемы сравнения подключен, к второму входу второго элемента ИЛИ, а выходы сумматора подключены соответственно к информационным входам
25 цифроаналогового преобразователя и блока вычисления взаимной корреляционной функции, выход цифроаналогового преобразователя подключен к информационному входу исследуемой аппарату30 ры, вход запуска генератора тактовых импульсов является входом запуска системы, синхронизирующие входы дина- ,мического стенда подключены к седьмому выходу первого распределителя им- .дами генератора случ айных чисел, вто- „g пульсов рекуррентного цифрового фшть- рой выход первого распределителя им- тра, выход сумматора, которого соединен с управляющим входом динамического cтteндa. IТ а б ji и ц а 1
пульсов подключен к входу запуска генератора случайных, чисел, третий
0
5
выход
первого распределителя импульсов соединен с входами записи инфopмa ции первого и второго блоков умножения, четвертый вьпсод первого распределителя импульсов подключен к прямому входу третьего элемента И, Ьыход которого соединен с единичным входом триггера, прямой выход которого подключен к инверсному входу первого элемента И и второму входу второго элемента И, четвертый выход первого распределителя импульсов соединен с управляющим входом второго коммутатора и вторым входом третьего элемента ИЛИ, вь1ход которого подключен к установочному входу счетчика импульсов, шестой выход первого распределителя импульсов соединен с управляю0 Щим входом первого коммутатора, выход Равно схемы сравнения подключен, к второму входу второго элемента ИЛИ, а выходы сумматора подключены соответственно к информационным входам
5 цифроаналогового преобразователя и блока вычисления взаимной корреляционной функции, выход цифроаналогового преобразователя подключен к информационному входу исследуемой аппарату0 ры, вход запуска генератора тактовых импульсов является входом запуска системы, синхронизирующие входы дина- ,мического стенда подключены к седьмо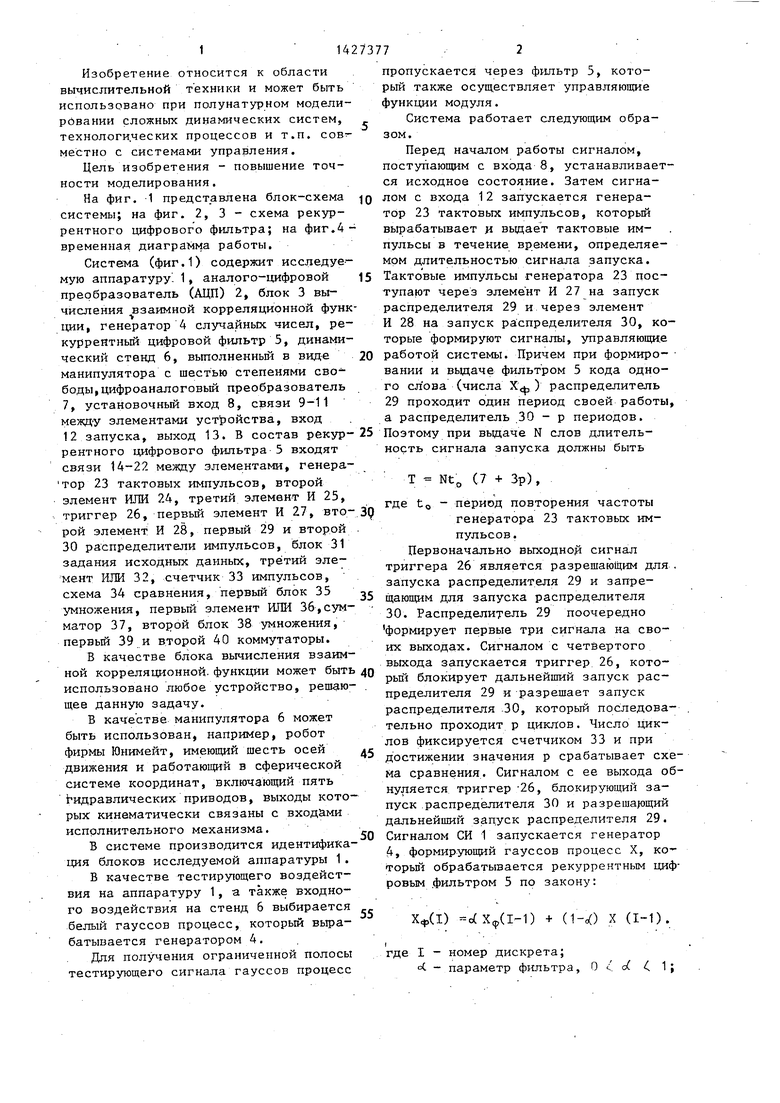
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1188751A1 |
| Система полунатурного моделирования динамических систем | 1982 |
|
SU1121681A1 |
| Функциональный генератор | 1983 |
|
SU1092483A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ОБСТАНОВКИ | 1995 |
|
RU2126975C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ АНТЕННЫ | 1995 |
|
RU2139549C1 |
| Цифровое устройство для электромагнитного контроля изделий | 1988 |
|
SU1596236A1 |
| Устройство для решения нелинейных задач теории поля | 1983 |
|
SU1156101A1 |
| Устройство приема телеметрической информации | 1989 |
|
SU1735883A1 |
| Многоканальный аналого-цифровой процессор | 1983 |
|
SU1120375A1 |
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1223248A1 |

Изобретение относится к вычислительной технике и может быть использовано при полунатурном моделирова НИИ сложньк динамических систем, тех - нологических процессов и т.п. совместно с системами управления. Целью изобретения является повышение точности моделирования. В соответствии с изобретением динамический стенд выполнен в виде шестистепенного манипулятора для имитации полного пространственного перемещения объекта, а для формирования тестирующего сигнала в виде белого гауссова шума введены цифроаналоговый преобразователь и рекуррентный цифровой фильтр. , Введенный рекуррентный цифровой фильтр, помимо фильтрующих функций, управляет работой генератора случайные чисел манипулятора и реальной аппаратуры. 4 ил. . W
Наименование сигнала РИ 29
О
1 2
3 4
5
Установка в ра 37
О блоков 35, 38 и сумматоЗапуск генератора 4
Запись в АЛУ 38 значений (1-о() и X (1-1)
Записв в АЛУ 35 значений (of) и ) Запуск распределителя 30 импульсов
Запись содержимого блока 38 в сумматор 37
.
Обнуление счетчика 33 Запись содержимого блока 35
СИ 6
Сигнал, стробируюпщй выходной код фильтра 5
Назначение сигнала
О блоков 35, 38 и сумматоНаименованиесигнала РИ 30
1 2 3
Запись множимого в блоки 35,38 Сдвиг на -1 разряд регистра множителя + 1 счетчика 33
Таблица 2
Назначение сигнала
4
Фиг. f
Фиг: 2
XpOHOtiffnu ТГ 23
JL
пппп ппппппппп
дамм
ппп
Фаг.З
п
пппп
| Патент США № 4081858, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Белянин П.Н | |||
| Промьштенныё роботы | |||
| М.: Машиностроение, 1975, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
