Изобретение относится к техническим средствам автоматизации, а именно к системам сбора и цифровой обработки информации от пневматических дат- ; чиков технологических процессов. : Цель изобретения - повышение быст- родействия и сокращение затрат машинного времени системы ввода информации от пневматических датчиков в управляющий вычислительный комплекс (УВК). На чертеже представлена принципиальная схема системы.
Система содержит электропневмати
ot,,. о., oi. к типа бегущая единица (Ы; 1 0), обеспечивающая установку электропневматического коммутатора 1 в требуемое положение и подключение канала Р к групповому пневмоэлектропреобразователю 2.
При переключении коммутатора 1 . возникает переходный процесс, связан- ньй с опустошением либо наполнением приемной камеры преобразователя и балластных емкостей коммутатора (камера клапанов и межэлементные связи) через длинную линию связи между соот
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство ограничения "шага" сигнала задания регуляторам | 1988 |
|
SU1583942A1 |
| Система ввода информации от пневматических датчиков в электронную управляющую вычислительную машину | 1980 |
|
SU900307A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Способ преобразования группы пневматических аналоговых сигналов в код | 1988 |
|
SU1582189A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Пневматический дозатор | 1984 |
|
SU1290271A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневматическое устройство контроля и сигнализации | 1984 |
|
SU1251142A1 |
| Пневматический блок памяти для систем цифрового управления | 1987 |
|
SU1497623A1 |
| Устройство для приема пневматических дискретных сигналов | 1980 |
|
SU959133A1 |
Изобретение относится к системам сбора и цифровой обработки информации от пневматических датчиков технологических процессов. Цель изобретения - повьппение быстродействия и сокращение затрат машинного времени. С этой целью в систему, содержащую электропневматический коммутатор 1, аналоговый пневмоэлектрический преобразователь 2,-процессор 7 и каналы ввода-вьшода 10 и 8, дополнительно введены модуль ввода 11 инициативных сигналов и формирователь сигнала готовности, выпол-2 ненный на основе трехмембранного эле- мента сравнения 3, переменного 5 и Л постоянного 4 др осселей и дискретно- и. го пневмоэлектропреобразователя 6. l- Предложенная система обеспечивает по-- вышение быстродействия в 1,5-3 раза при одновременном уменьшении занятости процессора. ю -vj 4: о ел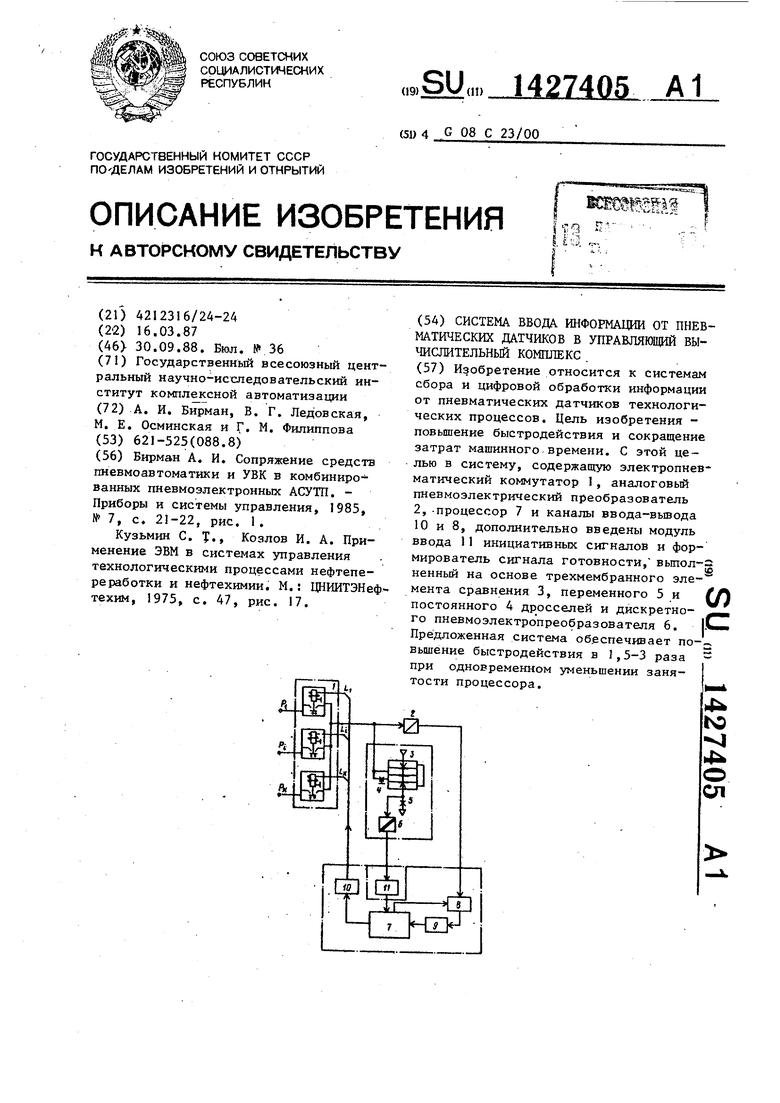
ческий коммутатор 1, аналоговый пнев- 5 ветствующим датчиком и коммутатором 1 .
моэлектрический преобразователь 2 (типа ПЭ 55М или 1ШЭ.2), трехмембран- ньй элемент 3 сравнения, переменный 4 и постоянный 5 дроссели, дискретный
Пока происходят изменения на входе ь преобразователь 2, существует перепад на дросселе 4 и мембранный блок элемента 3 сравнения находится в одпневмоэлектропреобразователь 6, про- 20 крайних положений, а его выцессор 7 (типа СМ 50/60), канал 8 ввода аналогового сигнала в УВК, скомпонованный на модуле МК мульти- ,плексора (типа А612-20)и модуле 9 анало-1щфррвого преобразования (типа 25 А611-21), канал.10 вывода дискретного управляющего сигнала из УВК на основе модуля вьгоода дискретных управляющих сигналов (МВДС) Э (типа
ходной сигнал имеет значение О , В установившемся состоянии (после окончания переходного процесса) давления в плюсовой и минусовой самерах элемента 3 сравнения становятся равными, его мембранный блок находится в промежуточном состоянии, а на его выходе формируется сигнал 1, индицирующий состояние готовности канала
А641-17) и модуль 1 1 ввода инициатив-зо Этот сигнал через дискретный пневмо35
ных сигналов в УВК MB в ИС типа А622-11. .
Сигнальные входы электропневматического коммутатора 1 соединены с входными каналами пневматических сигналов Р,,.. .,Р, (обычно К-8 или К 16), травляющие входы - с каналом 10 вьшода дискретных управляющих сигналов, а выход через аналоговый преобразователь 2 подключен к каналу 8 и 9 ввода аналоговых сигналов в УВК„ Выход коммутатора 1 связан также с плюсовой камерой трехмембранного элемента 3 сравнения непосредственно и через переменный дроссель 4 - с его дс минусовой камерой. Проточные камеры элемента 3 сравнения объединены, а сопло сброса сообщено через постоянный дроссель 5 с атмосфер ой и непосредственно - с входом дискретного
40
электропреобразователь 6 и модуль 1I ввода инициативных сигналов вырабатывает прерьшание и активизирует обращение процессора 7 к данному каналу (датчику) с помощью мультиплексора 8, и АЦП 9.
В результате электрический выходной сигнал преобразователя 2, пропорциональный измеряемому давлению Р, преобразуется в цифровую форму и вводится в оперативную память процессора 7. Система подготовлена к переходу на следующий огфашиваемьй канал.
В данной,конфигурации затраты машинного времени при каждом опросе исчисляются несколькими стандартными командами, а время цикла опроса всех датчиков определяется выражением
50
Ръ
пневмоэлектропреобразователя 6, выход которого подключен к модулю 11 ввода инициативных сигналов.
Система работает следуюшлм образом .
В соответствии с заданным режимом опроса (циклическим или адресным) на выходе МВДС 10 (УСО СМ ЭВМ) формируется дво1тчная последовательность
Пока происходят изменения на входе ь преобразователь 2, существует перепад на дросселе 4 и мембранный блок элемента 3 сравнения находится в одходной сигнал имеет значение О , В установившемся состоянии (после окончания переходного процесса) давления в плюсовой и минусовой самерах элемента 3 сравнения становятся равными, его мембранный блок находится в промежуточном состоянии, а на его выходе формируется сигнал 1, индицирующий состояние готовности канала.
Этот сигнал через дискретный пневмо
электропреобразователь 6 и модуль 1I ввода инициативных сигналов вырабатывает прерьшание и активизирует обращение процессора 7 к данному каналу (датчику) с помощью мультиплексора 8, и АЦП 9.
В результате электрический выходной сигнал преобразователя 2, пропорциональный измеряемому давлению Р, преобразуется в цифровую форму и вводится в оперативную память процессора 7. Система подготовлена к переходу на следующий огфашиваемьй канал.
В данной,конфигурации затраты машинного времени при каждом опросе исчисляются несколькими стандартными командами, а время цикла опроса всех датчиков определяется выражением
дс
50
Ръ
где
- время установления при подключении i-ro датчика. Так как величина %; случайным образом распределена на интервале 3...40 с, то
ТцК
маке
Например, при и следующем наборе постоянных времени: С, 5 с; .-t 10 с; Z 15 с и €-4 -- 20 с, предлагаемая система, реализующая асинхронный режим, обеспечивает опрос группы (из 4-х датчиков) за 50 с в отличив от системы по прототипу с синхронизацией по самому медленному каналу, для которой цикл опроса должен быть выбран равньм 4 20 80 с.
Формула из об р е т е н и я
Система ввода информации от пневматических датчиков в управляющий вы числительный комплекс, содержащая электропневматический коммутатор, сигнальные входы которого связаны с входными каналами, управляющие входы - с каналом вьшода дискретных управляющих сигналов из управляющего вычислительного комплекса, а выход через аналоговый пневмозлектрический преобразователь подключен к каналу ввода аналогового сигнала в управля27405
ющий вычислительный комплекс, о т- личающаяся тем, что, с целью повьшения быстродействия и со- с крещения затрат машинного времени, в ней дополнительно установлены трех- мембранный элемент сравнения, переменный и постоянньй дроссели, дискретный пневмоэлектропреобразователь 10 и модуль ввода инициативных сигналов, причем выход электропневматического коммутатора связан непосредственно с
плюсовой камерой трехмембранного элемента сравнения, с его минусовой ка- 15 мерой - через переменный дроссель,
проточные камеры трехмембранного элемента сравнения соединены между собой, сопло сброса трехмембранного элемента сравнения сообщено через по- 20 стоянный дроссель с атмосферой и непосредственно - с входом дискретного пневмоэлектрического преобразователя, подключенного своим выходом к модулю ввода инициативных сигналов в управляющий вычислительный комплекс.
| Бирман А | |||
| И | |||
| Сопряжение средств пневмоавтоматики и УВК в комбинированных пневмоэлектронных АСУТП | |||
| - Приборы и системы управления, 1985, № 7, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузьмин С | |||
| f., Козлов И | |||
| А | |||
| Применение ЭВМ в системах управления технологическими процессами нефтепереработки и нефтехимии | |||
| М.: ЦНИИТЭНеф- техим, 1975, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
