(54) ПНЕВМАТИЧЕСКАЯ СИСТЕМА ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ и УПРАВЛЕРМЯ



| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Пневматическое устройство контроля и сигнализации | 1984 |
|
SU1251142A1 |
| Устройство управления пневматическими регуляторами | 1980 |
|
SU881664A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Пневматическое устройство сигнализации состояния двухпозиционного исполнительного механизма | 1981 |
|
SU972540A1 |
| Пневматический регулятор | 1985 |
|
SU1262449A1 |
1
Изобретение относится к приборостро ению, а именно к пневматическшу СИСТЕ- мам центрапизованного контроля и управ-пения непрерывными технологическими процессами.
Известна пневматическая система централизованного контроля и управления, содержащая триггеры, выходы которых соединены с регуляторами, а входы с кнопками задания режима контуров рагу лирования (Автомат и Ручное) и бло ки дистанционно-управляемых задатчиков номиналов, и ручного управления Cl 1
Недостатком известной системы Является то, что., при ее использовании при вызове на индикацию любого VS3 ковтуров регулированйя процесс .автоматическоговыравнивания сигналов параметра и номв-, нала (в ручном режиме) или управляющих сигналов с выхода регулятора и за датчика ручного управления (в автоматв ческом режиме) начинается даже тогда, если оператор не собирается в дальнейшем изменять режим функционирования
контура регулирования. В результате npi -доходит быстрый износ приводов блоков групповых задатяикоа и возрастают не- производительные затраты эпектрознерпш. на юс эксш15атащ1ю.
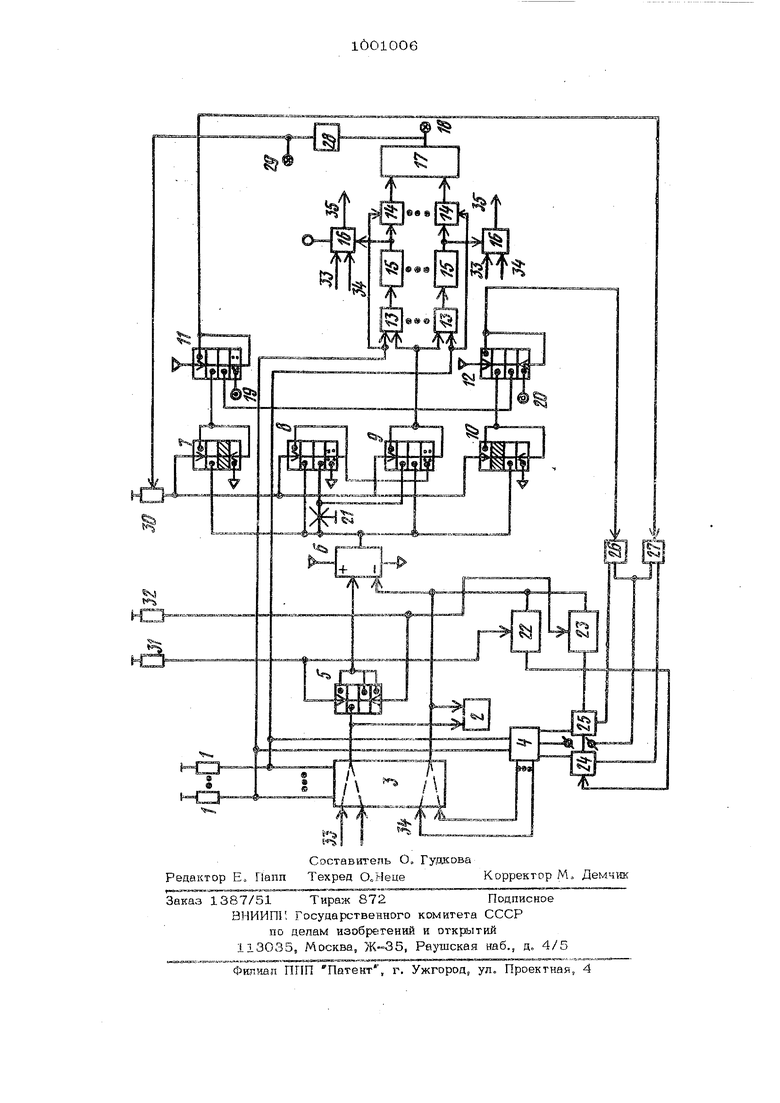
Наиболее близкой .к предлагеемомзизобретению по технической сущности и достигаемому результату является пнев матическая система ценгращгзоваиного контроля и управления, содерх агЕгая ком™
10 мутатор, входы которого соединенв с лк НЕями параметров, выходами регуляторов и блоков групповых задатчкков номиналов и ручного управления, управляющие с кнопками вызова, а выходы с
15 показываюшиь прибором, выходы кнопок вызова соединены с первыми входами первых и вторых элементов MS кнопки управления групповыми задатчиками, , триггеры входы которых связаш:- с выхо-
20 дами первых элементов И а выходы « с вторьми входа11.5И вторых эпеТЛентов И и ухфавляюши аН входами регуляторов, вых ды вторых элементов И соединены черва элемент ИЛИ с сигнализатором ручного режима; и инвертором, выход которого связан с сигнализатором автоматического режима и управляющим входга кнопки автомат, первый, второй, третий и чет- вертый пневмоэлектропреобразоватепи, включенные в цепи питания блока групповых задатчиков номиналов и ручного управления, первый, второй, третий и четвёртый элементы сравнения, выход треть его элемента сравнения соединен с входом первого пневмоэлектропреобразова теля, выход четвертого элемента сравнения с входом второго пневмоэлектропреобразователя, первые входы третьего и четвертого элементов сравнения, соединены с первым и вторым задатчиками 2) Недостатком известной системы является то, что при ее использовании не обеспечивается требуемая точность вырав нивания сигналов параметра и номиала при переключении контура регулирования в автоматический режим и управляющих сигналов при переключении контура ре-гулирования в ручной режим. Это объясняется тем, что в известной системе контролируется не момент выравнивания сравниваемых сигналов, а момент вхок дения одного из них в коридор, настраиваемый повторителями со сдвигом относительно, другого выравниваемого сиг нала. Минимальная величина коридора (зона нечувствительности) -определяется с одной стороны погрешностями злемен тов (суммарная погрешность последовательного соединения повторитель со сдвигом элемент сравнения оценивает. ся величиной порядка +1,О%), с другой требованиями подавления автоколебаний неизбежно возникающих при малой зоне чувствительности в силу неидеальной остановки двигателя. По экспериментальны данным погрешность известной системы составляет 2-3%. Целью изобретения является повыше- ние точности системы, Указанная цель достигается тем, что в пневматической системе централизованного контроля и управления, содержащей коммутатор, входы которого соединены с линбмми параметров, выходами регуляторов и блоков групповых задатчиков номиналов в ручного управления, управляющие входы - с кнопками вызова а выходы с показывающим прибором, выходы кнопок вызова соединены с первыми входами первых и вторых элементов И,кноге ки управления групповыми задатчика и, тршггеры,входы которых связаны с выхода И первых элементов И,а выходы - с входами вторых элементов И и управляющими входами регуляторов, выхоы вторых элементов И соединены через лемент ИЛИ d сигнализатором ручного режима и инвертором, выход которого вязан с сигнализатором автоматического режима и управляющим входом кнопки Автомат, первый пневмоэлектропреоб- разователь, второй пневмоэлектропреобразователь, третий пневмоэлектропреобразователь и четвертый пневмоэлектро- преобразователь, включенные в цепи питания блока групповых задатчиков номиналов и ручного управления,первый элемент сравнения, второй элемент сравнения, третий элемент сравнения и четвертый элемент сравнения, выход третьего элемента сравнения соединен с входом первого пневмоэлектропреобразователя, выход четвертого элемента сравнения с входом второго пнеыуюэпектропреобразователя, а первые входы третьего и четвертого элементов сравнения соединены с первым и вторым задатчиками, установлены дроссель, первое реле, второе реле, третье реле, четвертое реле, пятое репе и шестое репе, при этом первый выход коммутатора соединен с плюсовой каме рой первого элемента сравнения, выход которого соединен с минусовой камерой данного элемента и с плюсовой камерой второго элемента сравнения, второй выход коммутатора связан с минусовой камерой второго элемента сравнения и вторыми входами третьего и четвертого элементов сравнения, выход второго элемента сравнения связан через дроссель с минусовой камерой второго реле, плюсовой камерой третьего реле и непосредственно с плюсовой камерой первого ре-пе, второго реле и минусовыми камерами третьего реле и четвертого реле, выход кнопки автомат соединен с питающими соплами одних проточных камер первого реле, второго реле, третьего реле и чет вертого реле, выход первого реле связан с плюсовым входом пятого реле, выход четвертого реле - с плюсовой камерой шестого реле, выход второго реле с дру гой проточной камерой третьего реле, выход третьего реле .- с вторыми входами первых элементов И и с минусовыми камерами пятого реле и шестого реле, выходы пятого и шестого реле соединены с входами третьего и четвертого пневмо- электропреобразователей соответственно, а выходы первого и второго задатчиков соединены с питающшу1и соплами первого эпемёнга сравнения, причем другие проточные камеры первого, второго и четвертого репе подключены к атмосфере, а пятого и шестого репе - к выходам кнопок управления групповыми задатчиками. На чертеже показана блок-скема пнев матической .системы централизованного контроля, и управления. Система содерчкит кнопки 1 вызова, показывающий прибор 2, ксымутатор 3, блок 4 групповых задатчшсов номиналов и ручного управления, первый элемент 5 сравнения, второй элемент 6 сравнения, первое реле 7, второе реле 8, третье ре ле 9, четвертое реле 1О, пятое реле 11 шестое реле 12, первые элементы И 13, вторые элементы И 14, триггеры 15, регуляторы 16, эпемент ИЛИ 17, сигнализатор 18 ручного ре жима,кнопки управ-. ления групповыми задатчиками Больше 19, Меньше 2О, дроссель 21, третий элемент 22сравнения, четвертый элемент 23 сравнения, первый пневмоэлектропреобразователь 24, второй пневмоэлектропреобразователь 2.5, третий пневмо электропреобразователь 26, четвертый пневмоэлектропреобразователь 27, инвертор 28, сигнализатЬр 29 автоматического режима -и кнопка ЗО Автомат, первый задатчик 31 давления 1,О кгс/см и второй задатчик 32 давления 0,2кгс/с каналы параметров 33, номинала 34 н управляющих сигналов 35. Система работает следующим образом Для вызова того или иного контура на показывающий прибор 2 оператор нажимает на соответствующую кнопку 1 вы зова, выходной сигнал которой поступает на коммутатор 3. Последний срабатывает и обеспечивает коммутацшо сигналов параметров от датчика (не показан) и номи нала от блока 4 групповых задатчиков контролируемого контура на показывающий прибор 2. Если контролируемый в данный момент контур окажется в ручном режиме (сигнализатор 18 ручного режима включен), а оператор сочтет необхо-. димым переключить его в автоматический режим, то он нажимает на. кнопку 30 , запоминающую выходной сипнал. Сигналы па.раметра и номинала с выхода коммутатора 3 поступают на вхо ; ды второго элемента 6 сравнения. При этом сигнал параметра предварительно проходит первый элемент 5 сравнения, обеспечивающий нахождение его значений ,% стандартном диапазоне; для этого верхнее сопло первого элемента 5 срав- йния запитано от первого задатчика 31 давления 1,0 кгс/см , а нижнее от второго задатчика 32 давления 0,2 кгс/см. Если значение параметра окажется большим значения номинала, то на выхог да второго элемента 6 сравнения появится сигнал условной , который, пройдя через первое реле 7 и пятое реле 11, поступит на четвертый пнввм с электропреобразователь 27, последний замкнет цепь электропитания блока 4 групповых задат чиков таким образом, что его реверсивный двигатель начнет вращать шток задатчика номинала соответствующего контура регулирования по часовой стрелке, обеспечивая увеличение значения номинала; вращение штока требуемого задатчика происходит из-оа того, что на управляю-щий пневматический вход блока 4 rpjrnnoвых задатчшсов поступил выходной СИР™ нал от соответствующей кнопки 1 вызова. В момент, когда значение номинала сравняется со значением параметра, второй элемент 6 сравнения сработает таким образом, что на его выходе появится сигнал условного 0, в результате четвертый пневмоэлектропреобразователь 27 вернется в исходное разомкнутое состо« нние, реверсивный двигатель и шток задатчика номинала блока 4 группоных задатчиков прекращает вращение и новое установившееся ажчение номк{шла будет .равно значению параметра. В этот же момент мембранный блок второго реле 8 займет верхнее положение (в пгаосовой камере установится нулевое давлетае, в минусовой временно сохранится сигнал условной. 1, время сохранения сигнала обуславливается настройкой дросселя 21), мембранный блок третьего реле 9 займет Шокнее положение (в плюсовой камере временно сохранится сигнал условной , в минусовой установится нулевое давление) и выходной сигнал кнопки 30 Автомат через верхнее сопло третьего реле 9 и соответствующий первый элемент И 13 (второй сигнал на вход первого элемента И 13 поступает от соответ ствующей кнопки 1 вызова) пройдет на соответствующий тртгггер 15 и сбросит его. В результате соответствующий регулятор 16 включится и его выходной cva нал по каналу 35 поступит в линию ионолннтельного механизма. Так как выход4 ной сигнал триггера .15 равен при этом условному , то ы 1ходные сигналы соответствующего второго элемента И 14 и элемента ИЛИ 17 также окажутся равными условному О, в результате на выкоде инвертора 28 появится сигнал условной , сработает сигнализатор 29 автоматического режима, а кнопка ЗО Автомат вернется в исходное (не нажатое) состояние. Таким образом, пере- кточение контура с ручного в автоматический режим происходит в момент достИ жения равенства сигнапов параметра и номинала, т.е. переключения осуществляются безударным образом, а выравштание сигналов осуществляется автоматически и с высокой точностью (до 0,5% по экспериментальным данным). С целью ускорения отключения электродвигателя блока 4 групповых задатчиков в момент выравнивания сигналов па- раметра и номинала .контролируемого кон тура пятое реле 11 и шестое репе 12 блокируются выходным сигналом третьего реле 9. Если значение параметра в момент прреключения контура регулирования с ручного в автомагический режим окажет- ся меньшим значения номинала, то выходной сигнал второго элемента 6 сравнения будет равным условному . В этом случае при 1шжатии оператором кно ки ЗО Автомат ее выходной сигнал пройдет четвертое реле 10, шестое реле 12 и включит третий пневмо8лектропре. образ ова те ль 26, который замкнет цепь электропитания, блока 4 групповых аа- датчш :ов образом, что его резерв ный двигатель начнет вращать шток за датчика номинала соответствующего контура регулирования против часовой стрел ки до того момента, пока зшчение номинала не станет равным 31-1ачеш-по параметра (выходной сигнал второго элемента 6 сравнения примет значение услов™ ной 1, сработают второе реле 8 и третье реле 9, выходной сигнал последнего заблокирует выход шестого реле 12 третий пневмоэлектропреобразователь 26 вернется ь исходное разомкнутое состоя- ние). Аналогичным образом осуществляется тгереключение контролируемого контура регулирования с автоматического режтла в ручнойо В этом случае на входы комму татора 3 подаются и ход№1е ре гуляторов 16 и блока грзтшовых задатчи ков диетананонного (ручного) управления (не показан). Работа элементов сравне кия Е реле осуишствляется по тому же алгоритму, что и в описанном выше случае, В момент выравн шанкя выходных сигналов регулятора 16 и блока 4 грут поБЫк задатчйков дистанционного (py4ji го) отправления реле, аналогичное третье- му реле 9, выдает сигнал условной 1, который обеспечит взведеяие соответствуйющего триггера 15, последний выдает сигдал условной 1, который отключит регулятор 16, соберется по схеме И с соответствующим выходным сигналом . кнопки 1 вызова на соответствующем втором элементе И 14, выходной сигнал ко™ торого, пройдя элемент ИЛИ 17, включит сигнализатор 18 ручного режима и возвратит в исходное ненажатое состояние , кнопку Ручное (не показана). Использование третьего элемента 22 сравнения и четвертого элемента 23 срав нения позволяет ограничить максимально и минимально допустимые значения сигнала номинала; при выходе этого сигна- ла за допустшч/(ые границы (0,2 кгс/см и 1 кгс/см ) на выходе третьего элемента 22 сравнения (или четвертого эле мента 23 сравнения) появится сигнал условной 1, который воздействует на первый пневмоэлектропреобразователь 24 (или второй гшевмопреобразователь 25) таким образом, что цепь электропитания блока 4 групповых задиэ.тчиков окажется разомкнутой, такик образом предотвращается возможное заклинивание штока кон« тролируемого в данный момент зацатчика в одном из крайних положений. При необходимости оператор т-шеет возможность нажатием на кнопку 19 Тгравленгш Больше (ти кнопку 20 управления Меньш ) воздействовать через третий пневмоэлектропреобразователь 26 (или четвертый пневмоэлектропреобразо- .ватель 27) на положение коктролируемо го задатчика блока 4 группDBJ IX задатчи-ков. Прш-декение предлагаемой системы позволит повысить TO4tiocTb выравнива- тш сравниваемых сигналов до 0,5% и тем самым обеспечить безударность пе ревода контуров регулирования с режима ш режим. изобретения Пневматическая система централизованного контроля и травления, содержатся коммутатор, входы которого соединены с линиями параметров, выходами регуляторов и блоков групповых задатчиков но миналов и ручного утфавления, управля о ш.ие входы - с ккогжами вызова, а ьыхо--ды с покааьшаюшю л прибором, выходы кнопок вызова соедипеш 1 с первь } -1и входами первых и вторых элементов И, KHOI ки управления грутаховыми задатчккайи, триггеры, входы которых связаны с выхо дами первых, элементов И, а выходы - с вторыми входами вторых элементов И и управляющими входами регуляторов, выходы вторых элементов И соединены чере элемент ИЛИ с сигналюатором ручного режима и инвертором, выход которого связан с сигнализатором автоматического режима и управляющим входом кнопки Автомат, первый пневмоэлек1ропреобразователь, второй пневмоэлектропреобразователь, третий пневмоэлектрояреобразователь и четвертый пневмоэлектро- преобразователь, включенные в цепи питания блока групповых задатчиков ном& налов и ручного управления, первый элемент сравнения, второй элемент сравнения, третий элемент сравнения и четвертый элемент сравнения, выход третьего элемента сравнения соединен с входом первого пневмоапектропреобразователя, выход четвертого элемента сравнения с входом второго пневмоэлектропреобра« зова теля, а первые вхощ третьего и чет вертого элементов сравнения соединены с первым и вторым задатчиками, отличающаяся тем, что, с целью повышения точности системы, в ней уста новлень дроссель, первое реле, второе реле, третье реле, четвертое реле, пятое реле и шестое реле, при этом первый вы ход коммутатора соединен с плюсовой камерой первого элемента сравнения, вы ход которого соединен с минусовой камерой данного элемента, плюсовой второго элемента сравнения, второй выход ксммутатора связан с минусовой камерой второго элемента . сравнения и вторыми входами третьего и четвертого элементов сравнения, выход второго элемента сравнения связан через дроссель с минусовой камерой второго реле, плюсовой камерой третьего реле и непосредственно с плюсовой камерой первого реле, второго реле и минусовыми камерами третьего реле и четвертого реле, |выход кнопки Автомат соединен с питающими соплами .одних проточных камер первого реле, второго реле, третьего реле и четвертого реле, выход первого реле связан с плюсовым входом пятого реле, выход четвертого реле - с плюсовой камерой шестого реле, выход второго реле с другой проточной камерой третыего реле, выход третьего реле - с вторыми входами первых элементов И и ми4 нусовыми камерами пятого реле и шестого реле, выходы пятого и шестого реле соединены с входами третьего и четвертого пневмоэлектропреобразовате- лей соответственно, а выходы первого и второго задатчиков соединены с питающими соплами первого элемента сравнения, причем другие проточные KaMejsj первого, второго и четвертого реле подключены к атмосфере, а пятого и шестого реле - к выходам кнопок управления групповыми задатчиками. Источники информадш, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 7О5419, кло Q О5 В 11/58, 1977. 2.Авторское свидетельство СССР по заявке № 2996О9О/1 , кл, q О5 В 11/58, 198О (прототип).
