HJ
to
CD
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразователь с коррекцией характеристики | 1986 |
|
SU1446599A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Система управления электроприводом печатной машины | 1988 |
|
SU1558837A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Устройство для регистрации одиночных ударов | 1987 |
|
SU1479878A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
СЮ 00
Изобретение относится к измерительной технике и может быть использовано для преобразования измеряемого физического параметра, например перемещения, в электрический сигнало
Цель изобретения - расширение динамического диапазона и увеличе- :ние точности измерительного преобразователя
Поставленная цель достигается тем, ,что в измерительном преобразо- вателе содержащем дифференциальный датчик или датчик, состоящий из информационного и компенсационного блоков, два преобразователи выход- него параметра датчика в электрический сигнал и блок вьщеления разности сигнала,соединенный с регистратором, выходные сигналы преобразователей складывают и сумму сравнивают с эталонным сигналом. При этом формируется сигнал опибки, который через регулятор и блоки настройки , смещает характеристики преобразователей таким образом, чтобы сумма выходных сигналов преобразователей была равна эталонному сигналу. Такая коррекция характеристик преобразователей исключает аддитивную и мульти- плик ативную составляющие погрешности преобразования измеряемой физической величины в электрический сигнал, расширяет линейную область характеристики преобразования.
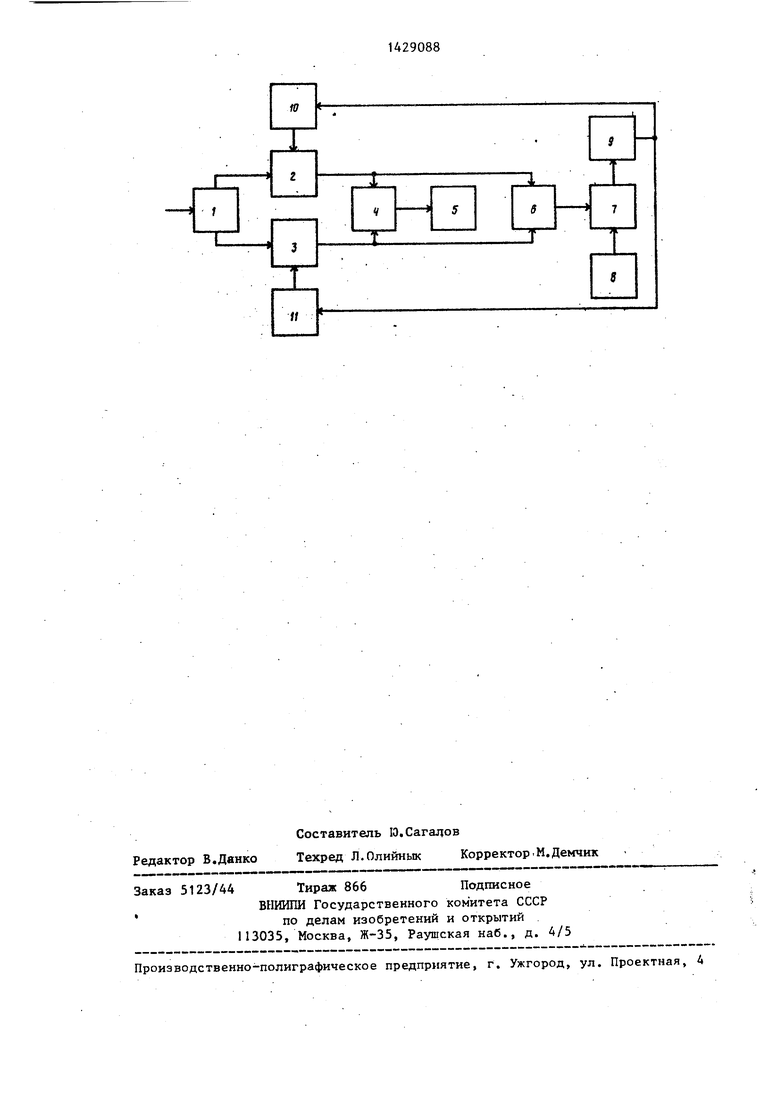
На чертеже изображе;на структурная схема преобразователя, - «
Измерительный преобразователь содержит датчик 1, первый и второй преобразователи 2 и 3, первый вычита- тель 4, регистратор 5, сумматор 6 второй вычитатель 7, задатчик 8 опорного сигнала, регулятор 9, первый и второй блоки 10 и 11 настройки.
Преобразователь работает следующим образомо
0
5
0
5
0
5
0
5
Сигналы датчика 1, в качестве которого используется дифференциаль- ный датчик или датчик, состоящий из информационного и компенсационного блоков, преобразуются первым и вторым преобразователями 2 и 3 в электрические сигналы Выходным сигналом преобразователя является разность сигналов первого и второго преобразователей, образующаяся на первом вычитателе 4 и поступающая на регистратор 5. Характеристики первого и второго преобразователей могут изменяться (смещаться) посредством первого 10 и второго 11 блоков настройки На входы этих блоков поступает одинаковый сигнал от регулятора 9, сформированный по сигналу рассогласования. Сигнал рассогласования образуется вторым вычитателем 7, который сравнивает сумму сигналов первого и второго преобразователей на выходе сумматора 6 с эталонным сигналом задатчика 8 опорного сигнала.
Требуемая точность измерительного преобразователя достигается с помощью выбора крутизны характеристик первого и второго преобразователей по сигналу регулятора При реализации устройства, вьшолняющего, например, преобразование перемещений в частоту электрического сигнала, в качестве Датчика 1 может быть использован индуктивный датчик перемещений, в качестве преобразователей 2 и 3 - автогенераторы с автоматической подстройкой частоты, в качестве сумматора 6 - смеситель с полосовым фильтром, а для формирования сигнала рассогласования - кварцевый дискриминатор с операционным усилителем,о Регулятор 9 может быть как статическим с максимально большим коэффициентом усиления так и астатическим, содержащим интегратор.
| Устройство для измерения перемещений с частотным выходом | 1978 |
|
SU783566A1 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК ДИФФЕРЕНЦИАЛЬНЫХ ЧАСТОТНЫХ ДАТЧИКОВ | 1972 |
|
SU434329A1 |
