со
СП
со 4
vj
I Изобретение относится к устройст- ам автоматического регулирования а непрерывном прокатном стане холодной прокатки и может использоваться для автоматического регулирования олщины полосы на выходе стана, а акже на объектах с переменным транс- йортным запаздыванием.
; Цель изобретения - снижение про- дольной разнотолпр нности за счет оорсирования процесса регулирования и его стабилизации при изменении коэфоициента пластической деформации прокатываемого материала.
На фиг. 1 представлена блок-схе- la устройства автоматического гулирования толсщны полосы на непрерывном прокатном станеj на фиг. 2 - схема интегратора со смещением; на })иг. 3 - схема блока транспортного запаздывания; на фиг. 4 - временные диаграммы изменения выходных сигналов блоков при отработке устройством скачкообразного возмущающего воздей- ствия.
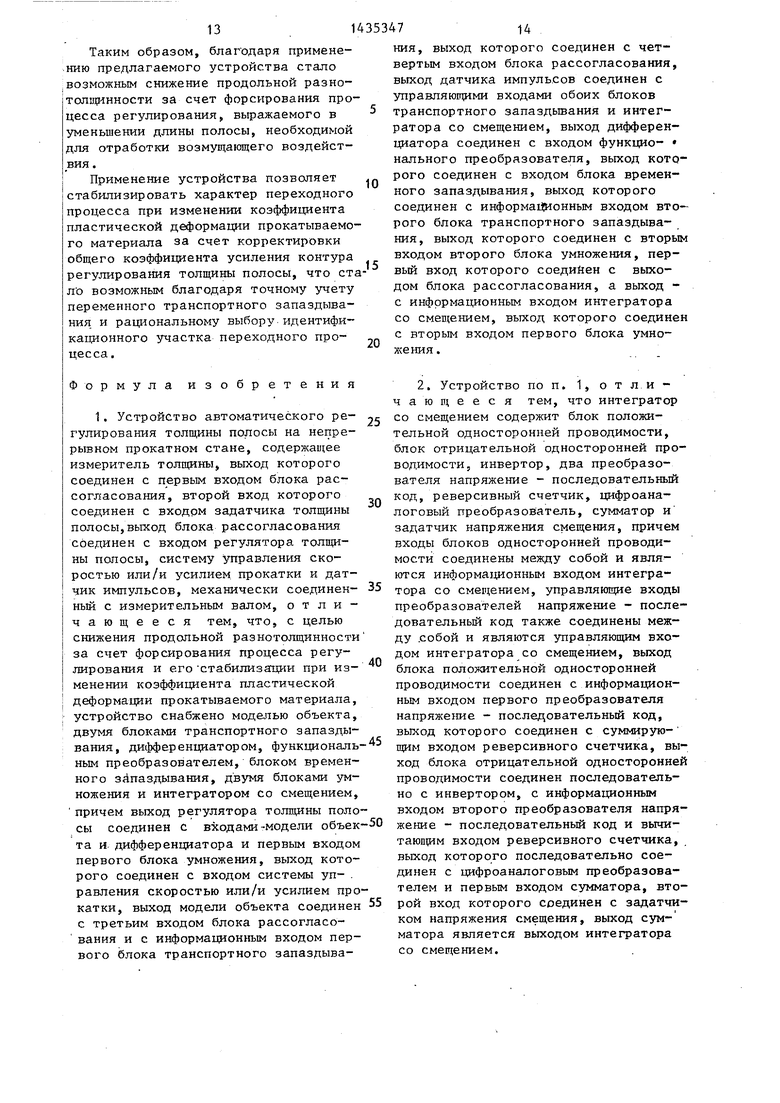
Кривые 1 соответствуют режиму, когда обпрй коэффихдаент усиления контура регулирования соответствует Iноминальному, кривые 2 - общий козф- 1фициент усиления ниже номинального, кривая 3 - обпрй коэффициент усиления выше номинального, кривая 4 со I ответствует отработке скачкообразноI го возмущающего воздействия извест- ным устройством, настроенным на ра- I боту без существенного пере1зегулиро- вания, что соответствует темпу интегрирования регулятора а 0,25. При. этом окончание переходного процесса :наступает через 5€.
Устройство содерясит последовательно соединенные измеритель 1 толщи- : ны, выход которого соединен с первым входом блока 2 рассогласования, вто- рой вход которого соединен с выходом задатчика 3 толпд-тны полосы. Выход блока 2 рассогласования соединен с первым входом блока 4 умножения и с входом регулятора 5 толщины полосы, выход которого соединен с первым йяодом блока 6 умножения, входом модели 7 объекта и входом диз еренЦиа- тора 8. Выход блока 6 умножения соединен с системой 9 управления скорое тью или/и усилением прокатки. Вьпсод модели 7 соединен с третьим входом блока 2 рассогласования и информационным входом первого блока 10 транспортного запаздывания, управляюр и вход которого соединен с выходом датчика 11 импульсов. Вход датчика 11 импульсов механически соединен с измерительным валом 12, Выход блока 10 транспортного запаздывания соединен с четвертым входом блока 2 рассогласования. Выход дифференциатора 8 подключен к входу функционального преобразователя 13, выход которого соединен-с входом блока 14 временного запаздывания, соединенного выходом с информационным входом блока 15 транспортного запаздывания, управ- ляю11Щй вход которого соединен с выходом датчика 11 импульсов, а выход - с вторым входом блока 4 умножения, выход которого соединен с информационным входом интегратора 16 со смещением. Управляювщй вход интегратора 16 соединен с выходом датчика 11 , импульсов, а выход - с вторым входом блока 6 умножения.
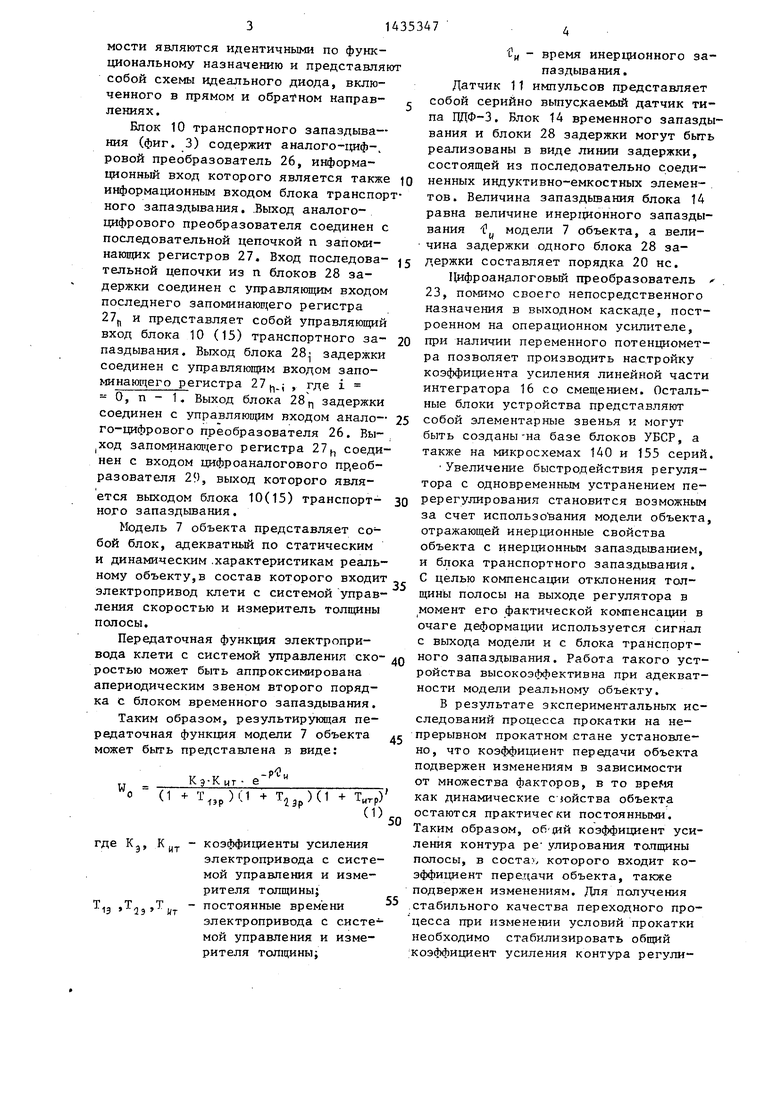
Интегратор 16 со смещением (фиг.2) содержит блок 17 положительной односторонней проводимости и блок 18 отрицательной односторонней проводимости, причем входы указанных блоко соединены между Собой и являются информационным входом интегратора 16 со смещением. Выход блока 18 отрицательной односторонней проводимости соединен с входом инвертора 19,выход кото- соедин ен с информационньм входом преобразователя 20 напряжение - последовательный код, соединенного выходом с вычитающм входом реверсивного счетчика 2t. Управляющие входы преобразователей 20 и 22 напряжение- последовательный код соединены между собой и являются управляющим входом интегратора 16 со смещением. Выход блока 17 положительной односторонней проводимости соединен с информационным входом преобразователя 22 напряжение - последовательный код, выход которого соединен с суммирующим входом реверсивного счетчика 21. Выход счетчика 21 соединен с входом цифро- аналогового преобразователя 23, вы- ход которого соединен с первым входом сумматора 24, второй вход которого соединен с задатчиком 25 напряжения смещения, а выход является выходом интегратора 16 со-смещением.
Блоки 17 и 18 положительной и отрицательной односторонней проводимости являются идентичными по функциональному назначению и представляю собой схемы идеального диода, включенного в прямом и обратном направлениях.
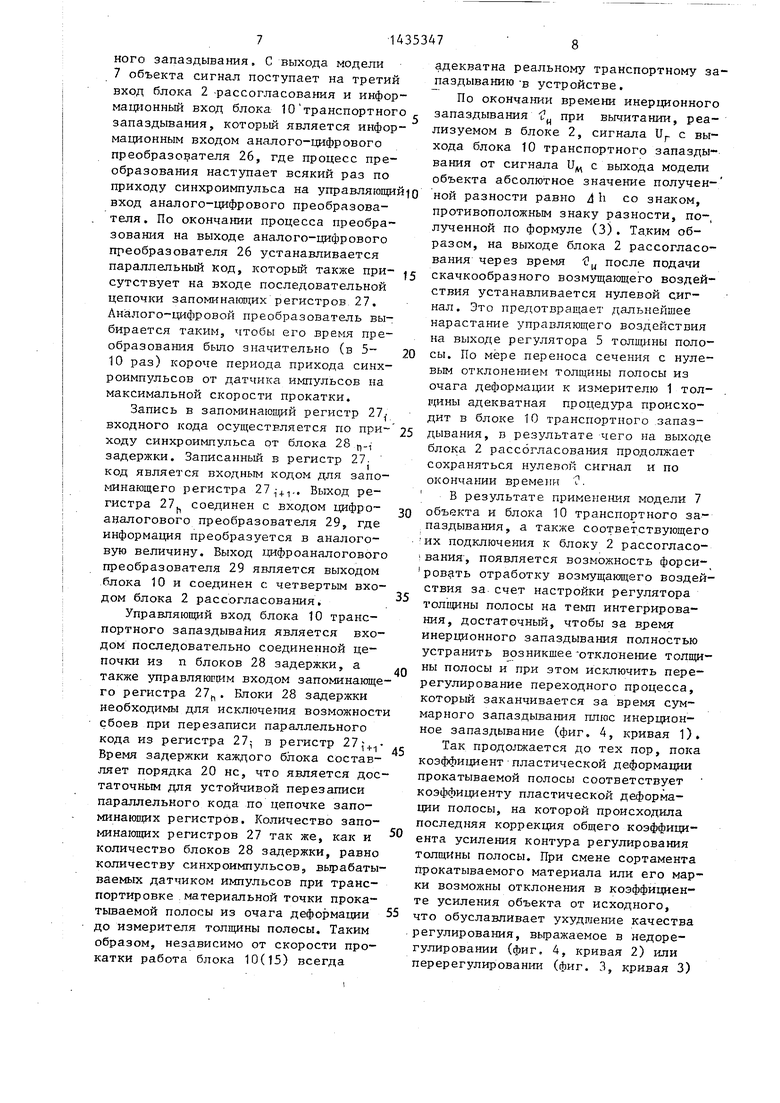
Блок 10 транспортного запаздыва- ния (фиг. 3) содержит аналого-гщф- ровой преобразователь 26, информационный вход которого является также информационньм входом блока транспорного запаздывания. .Выход аналого- цифрового преобразователя соединен с последовательной цепочкой п запоминающих регистров 27, Вход последова- тельной цепочки из п блоков 28 задержки соединен с управляющим входом последнего запоминающего регистра 27 и представляет собой управляющий вход блока 10 (15) транспортного за- паздывания. Выход блока 28 задержки соединен с управляющим входом запо- минающего регистра 27(.j , где i О, п - 1. Выход блока 28 задержки соединен с управляющим входом анало- го-цифрового преобразователя 26. Вы- ход запоминаюр егс регистра 27 соединен с входом цифроаналогового пдеоб- разователя 29, выход которого является выходом блока 10(15) транспорт- ного запаздывания.
Модель 7 объекта представляет собой блок, адекватный по статическим и динамическим .характеристикам реальному объекту,в состав которого входит электропривод клети с системой управления скоростью и измеритель толщины полосы.
Передаточная функция электропривода клети с системой управления ско- ростью может быть аппроксимирована апериодическим звеном второго порядка с блоком временного запаздывания.
Таким образом, результируклцая передаточная функция модели 7 объекта может бьп-ь представлена в виде:
Кэ-Кнт- е о (1 + т
op) :i Т,р)(1 н- )
Kg, К
ит
т Т J-23
Иг
коэффициенты усиления электропривода с системой управления и измерителя толщины; постоянные времени электропривода с системой управления и измерителя толщины;
ю 20 5 О
о
0
5
Си - время инерционного запаздывания.
Датчик 11 импульсов представляет собой серийно вьшускаемый датчик типа ПДФ-3. Блок 14 временного запаздывания и блоки 28 задержки могут быть реализованы в виде линии задержки, состоящей из последовательно соединенных индуктивно-емкостных элементов. Величина запаздьшания блока 14 равна величине инерционного запаздывания f модели 7 объекта, а величина задержки одного блока 28 задержки составляет порядка 20 не.
Цифроандлоговый преобразователь f 23, помимо своего непосредственного назначения в выходном каскаде, построенном на операционном усилителе, при наличии переменного потенциометра позвапяет производить настройку коэффициента усиления линейной части интегратора 16 со смещением. Остальные блоки устройства представляют собой элементарные звенья и могут быть созданы-на базе блоков УБСР, а также на микросхемах 140 и 155 серий. Увеличение быстродействия регулятора с одновременным устранением перерегулирования становится возможным за счет использо вания модели объекта, отражающей инерционные свойства объекта с инерционным запаздьюанием, и б.лока транспортного запаздьшания. С целью компенсации отклонения толщины полосы на выходе регулятора в момент его фактической кo пleнcaции в очаге деформации используется сигнал с выхода модели и с блока транспортного запаздывания. Работа такого устройства высокоэффективна при адекватности модели реальному объекту.
В результате экспериментальных исследований процесса прокатки на непрерывном прокатном стане установлено, что коэффициент передачи объекта подвержен изменениям в зависимости от множества факторов, в то время как динамические счойства объекта остаются практически постоянными. Таким образом, об {ий коэффициент усиления контура ре- улирования таттщины полосы, в соста, которого входит коэффициент пере. объекта, также подвержен изменениям. Для получения стабильного качества переходного процесса при изменении условий прокатки необходимо стабилизировать общий коэффициент усиления контура регули
рования толщины полосы, для чего предусмотрен блок 6 умножения.
Предлагаемая структура устройства позволяет выявить отличие в коэффициенте передачи между реальным объектом и его моделью в ограниченные отрезки времени. Для определения этих отрезков служит идентификатор, состо- ящий из дифференциатора 8, функцио- ;нального преобразователя 13, блока 14 временного запаздьшания, блока 15 транспортного запаздывания и блока 4 умножения. Исполнительными органами идентификатора являются интегратор 16 со смещением и первый блок 6 умножения ,
Однако, несмотря на ограниченность идентификационного отрезка времени, полезный сигнал может содержать шумовую составляющую, выражаемую симметричным законом распределения. Фильтрация шумовой составляющей осуществ- |ляется интегратором 16 со смещением, постоянная интегрирования которого I значительно больше периода шумовых Iсоставляюпщх. Кроме того, по отноше- Iнию к шумовой составляющей проявляется известное свойство центрированных стадаонарных случайных процессов, : заключаюп;ееся в том, что математичес- I кое ожидание случайной величины - |нуль, следовательно, при нормальной работе устройства результатом интегрирования пгумовой составляющей должен быть нуль или величина, близкая к |нему.
1 Применение интегратора со смещени- ;ем позволяет суммировать корректирую- щий сигнал, обусловленный отклонением I в коэффициенте передачи реального :объекта, с его эталонной аналоговой I моделью. При изменении коэффициента -пластической деформации прокатываемого материала и, соответственно, изменении общего коэффициента усиления контура регулирования толщины полосы откорректированный сигнал с выхода интегратора со смещением умножается на сигнал с выхода регулятора толщины в первом блоке 6 умножения, что приводит к восстановлению исходного коэффициента усиления контура регулирования, а также восстановлению качественных показателей работы регулятора Толщины полосы.
; Устройство работает следующим образом.
При прокатке на выходе блока 2 рассогласования формируется сигнал Uj (фиг. 4б), представляющий собой алгебраическую сумму выходных сигналов следующих блоков: измерителя 1 толщины полосы h, задатчика 3 толщины hj, модели 7 объекта (U,) и первого блока 10 транспортного запаздывания (и ) :
и h - h.
UA,U.
(2)
В установившемся состоянии сигнал
5
0
5
5
0
5
0
5
0
и равен нулю, так как h h
и
UT
и.
. При возникновении скачкообразного возму11(шащего воздействия (наиболее часто такая ситуация возникает при прохождении через стан, например, сварных швов) сигнал отклонения толщины полосы поступает на вход ПИД-регулятора 5, настроенного так, чтобы за время инерционного запаздывания 0 в объекте на выход,е интегрального канала регулятора сформировалось управляющее воздействие, достаточное для устранения возникшего отклонения. Такая настройка называ- ется оптимальной и осуществляете при разряженном интеграторе 16 со смещением, т.е. в процессе настройки регулятора 5 на втором входе блока 6 умножения все время присутствует один и тот же единичный сигнал смещения UCM (фиг. 4). Это позволяет без каких-либо изменений в первом блоке 6 умножения сигналу с выхода регулятора 5 поступать в систему 9 управления скоростью или усилием прокатки, . с выхода которой управляющий сигнал поступает на исполнительньй привод, формирующий целенаправленное изменение условий деформации в клети с целью устранения возникшего отклонения толпщны полосы Через время инерционного запаздывания О на выходе очага деформации текущее значение толщины становится равным заданному.
Однако, так как клеть и измеритель 1 толщины полосы разделяют транспортное запаздывание , то для предот- вращерия перерегулирования переходного процесса необходимо скомпенсировать все еще существующее отклонение толщины полосы
dh
Для модель
h, (3)
этого в устройство включена 7 объекта, блок 10 транспортпо истечении времени первого суммарного запаздьтания D,
Это обуславливает необходимость введе1-тя контура идентификации и стабилизации коэффициента усиления контура регулирования толщины полосы. Для этой цели сигнал U с выхода регулятора 5 толщины полосы поступает на вход дифференциатора 8, на выходе
dU5
которого появится сигнал
в
dt
С выхода дифференциатора 8 сигнал поступает в функциональный преобразователь 13, работа которого может быть описана следующей зависимостью:
и
1ъ
(4) 20
где и, - зона нечувствительности
функционального преобразователя 13.
С выхода функционального преобразователя 13 сигнал поступает в блок
14временного запаздывания, величина запаздывания которого равна И . С выхода блока временного запаздывания сигнал поступает на информационный вход блока 15 транспортного запаздывания, работа которого синхронизируется с работой по перемещению полосы на реальном объекте. Осуществление синхронизации производится посредством соединения выхода датчика 14 импульсов с управляющим входом блока
15транспортного запаздывания, выход которого соединен с вторым входом блока 4 умножения, первый вход которого соединен с выходом блока 2 рас.формацнонным входом интегратора 16 со смещением.45
входе интеграто- отрезок времени
+ D + Си (фиг, 4) поступает сиг-
Таким образом, на ра 16 со смещением в D + D
нал Ui вычисляемый по формуле (2). При равенстве коэффициентов усиления модели 7 и реального объекта сигнал ЛЬ в рассматриваемый (идентифицируемый) отрезок времени равен нулю. При уменьшении коэффициента усиления на реальном объекте по сравнению с ис- ходным сигнал ЛЬ имеет положительное значение и это обуславливает увеличение напряжения на выходе интег
ратора 16, При увеличении коэффициента усиления на реальном объекте по сравнению с исходным сигнал .i3h имеет отрицательное значение и это обусловливает уменьшение сигнала на выходе интегратора 16.,
Для обобщения работы интегратора, 16 при отрицательных возмущающих воздействиях сигнал h в идентификационный отрезок времени должен быть проинвертирован. Этю осуществляется с помощью второго блока 4 умножения при умножении сигнала с выхода блока 2 рассогласования на минус единицу, вырабатываемую функциональным преобразователем 13 при поступлении на его вход отрицательного сигнала с дифференциатора 8:
4
и
IS
и,5 О,
(5)
при и у
Информационный вход интегратора
16со смещеш ем (фиг. 2) представляет собой объединение входов двух блоков односторонней проводимости:
17пололдательной односторонней проводимости и отрицательной односторонней проводимости. Положительньш входной сигнал проходит через блок
17 и поступает в преобразователь 22 напряжение - последовательный код, на выходе которого по приходу синхроимпульса от датчика импульсов на его управляюпщй.вход формируется последовательность импульсов, пропорциональная величине входного сигнала на информационном входе. Чем вьше сигнал, тем большее количество импульсов содержится в посьшке. Нулевой сигнал таких импульсов не образуется. С выхода преобразователя 22 импульсы поступают на суммир ующий вход реверсивного счетчика 21, где они суммируются с параллельным кодом, установленным на выходе счетчика.
Отрицательный входной сигнал на входе интегратора 16 со смещением проходит через блок 18 отрицательной односторонней проводимости, после чего сигнал инвертируется инвертором 19 и поступает на вход преобразовав теля 20 напряжение - последовательный код, работа которого аналогична работе преобразователя 22, но вход прег- образователя 20 подсоединен к вычита- ющему входу реверсивного счетчика
ного запаздывания. С выхода модели 7 объекта сигнал поступает на третий вход блока 2 -рассогласования и информационный вход блока 10 транспортног запаздывания, который является информационным входом аналого-цифрового преобразователя 26, где процесс преобразования наступает всякий раз по приходу синхроимпульса на управляющи вход аналого-цифрового преобразователя. По окончании процесса преобразования на выходе аналого-цифрового преобразователя 26 устанавливается параллельный код, который также при- сутствует на входе последовательной цепочки запоминающих регистров,27, Аналого-цифровой преобразователь выбирается таким, чтобы его время преобразования было значительно (в 5- 10 раз) короче периода прихода синхроимпульсов от датчика импульсов на максимальной скорости прокатки.
Запись в запоминающий регистр 27 входного кода осуществляется по приходу синхроимпульса от блока 28 -1 задержки. Записанный в регистр 27. код является входным кодом для запоминающего регистра 27 .., Выход регистра 27 соединен с входом цифро- аналогового преобразователя 29, где информация преобразуется в аналоговую величину. Выход i-Щфроаналогового преобразователя 29 является выходом блока 10 и соединен с четвертым входом блока 2 рассогласования,
Управляющий вход блока 10 транспортного запаздывания является входом последовательно соединенной цепочки из п блоков 28 задержки, а также зтравляюЕИм входом запоминающего регистра 27, Блоки 28 задержки необходимы для исключения возможности сбоев при перезаписи параллельного кода из регистра 27; в регистр 27 {+. Время задержки каждого блока составляет порядка 20 НС, что является достаточным для устойчивой перезаписи параллельного кода по цепочке запоминающих регистров. Количество запоминающих регистров 27 так же, как и количество блоков 28 задержки, равно количеству синхроимпульсов, вырабатываемых датчиком импульсов при транспортировке материальной точки прока- тьшаемой полосы из очага деформации до измерителя толщины полосы. Таким образом, независимо от скорости прокатки работа блока 10(15) всегда
адекватна реальному транспортному запаздыванию -в устройстве.
По окончании времени инерционного запаздывания 1 при вычитании, реализуемом в блоке 2, сигнала U,- с выхода блока 10 транспортного запаздывания от сигнала U(, с выхода модели объекта абсолютное значение получен- ной разности равно 4 h со зигисом, противоположным знаку разности, по-, лученной по формуле (З), Таким образом, на выходе блока 2 рассогласования через время
после подачи
скачкообразного возмущающего воздействия устанавливается нулевой сигнал. Это предотвращает дальнейшее нарастание управляющего воздействия на выходе регулятора 5 толщины полосы. По мере переноса сечения с нулевым отклонением толщины полосы из очага деформации к измерителю 1 толщины адекватная процедура происходит в блоке 10 транспортного .запаздывания, D результате чего на выходе блока 2 рассогласования продолжает сохраняться нулевой сигнал и по окончании време}1и с. В результате применегшя модели 7 объекта и блока 10 транспортного за- паздывазшя, а также соответствующего их подключения к блоку 2 рассогласо- I вания , появляется возможность форси- ровать отработку возмущающего воздействия за счет настройки регулятора толщины полосы на теьт интегрирования, достаточный, чтобы за время инерционного запаздывания полностью устранить возникшее-отклонение толщины полосы и при этом исключить перерегулирование переходного процесса, который заканчивается за время суммарного запаздывания плюс инерционное запаздывание (фиг, 4, кривая 1), Так продолжается до тех пор, пока козффициент-пластической деформации прокатываемой полосы соответствует козффициенту пластической деформации полосы, на которой происходила последняя коррекция общего коэффициента усиления контура регулирования толщины полосы. При смене сортамента прокатываемого материала или его марки возможны отклонения в коэффициенте усиления объекта от исходного, что обуславливает ухудшение качества регулирования, вьфажаемое в недоре- гулировании (фиг. 4, кривая 2) или перерегулироваш-ш (фиг, 3, кривая 3)
11
21, в результате чего поступаю11{ие через указанный вход импульсы вычитаются из параллельного кода, установленного на выходе реверсивного счетчика 21. С выхода реверсивного счетчика 21 информация параллельным кодом передается на вход цифроанало- гового преобразователя 23, где преобразуется в аналоговую величину, усиливается и поступает на первый вход сумматора 24, на второй вход которого поступает единичное напряжение смещения U, от задатчика 25 напряжения смещения.
Таким образом, блоки 17-23 обра- зуют интегратор с регулируемой интенсивностью работы, которая благодаря измерительному валу 12 и датчику 11 импульсов зависит от скорости прокатки. Это необходимо для того, чтобы при различных скоростях прокатки сохранять постоянную (заданную) интенсивность корректирующих свойств устройства, что обеспечивает устойчивый характер приближения текущего коэффициента усиления контура регулирования толщины полосы к заданному и исключает возможность возникновения автоколебательного режима при низких скоростях прокатки.
С выхода интегратора 16 со смещением сигнал поступает на второй вход блока 6 умножения, где происходит коррекция общего коэффициента усиления контура регулирования толщины полосы с целью его соответствия исходному значению. Алгоритм работы интегратора 16 со смещением может быть описан следующим выражением:
К
и
Н
и, + ,(t),
U(t) при
О при
t
t -D +
(-а- :.),
где S - количество приращений сигнала на выходе интегратора (количество синхроимпульсов) в.
период времени v . v - - коэффициенты усиления и постоянная интегрирования интегратора.
Выход интегратора соединен с вторым входом первого блока 6 умножения, где происходит восстановление- требуемого коэффициента усиления контура регулирования ТОЛ1ЦИНЫ полосы.
534712
. Пусконападочная настройка устройства осуществляется при нажатой клавише Сброс на реверсивном счетчике 21. При этом блокируется работа счетчика и всего интегратора 16 так, что на его выходе независимо от комбинации входных сигналов все время присутствует напряжение смещения
10
20
30
35
0
45
50
55 Uj, , постоянство которого обуславливает постоянство общего коэффициента усиления контура регулирования.
Коэффициент усиления пропорционального и интегрального каналов регулятора 5 толщины 1ТОЛОСЫ устанавливается равным нулю, а коэффициент усиления интегрального канала принимается такик, чтобы за время инерционного запаздываьшя г, при существующем общем коэффициенте усиления сформировалось управляющее воздействие, достаточное для полной отработки скачкообразного возмзтцающего воздействия. После этого настраиваются пропорциональный и дифференциальный каналы регулятора 5 исходя из миьгами- зации дисперсии продольной разнотол- пщнности.
После полной настройки регулятора толщины полосы клавиша Сброс на счетчике 21 отжимается и при смене прокатываемого сортамента производится настройка коэффициента усиления K интегратора 16 со смещением исходя из получения достаточно, быстрого процесса приближения текущего коэффициента усиления контура регулирования к требуемому. Возможностью изменять коэффициент усиления интегратора 16 наделен цифроаяалоговый преобразователь 23 (фиг. 2).
В блок-схеме предлагаемого устройства по аналогии с блок-схемой известного устройства не указаны цепи и блоки блокирования регулятора толщины полосы и цепи разряда его интегратора, которые включаются в работу при выходе полосы из зева измерителя толщины.
Разряд интегратора со смещением осуществляется только при настройке устройства. .Коррекция выходного напряжения указанного интегратора осуществляется в процессе эксплуатации устройства по мере необходимости согласно описанию устройства. Разряд регулятора 5 толщины полосы осзлдеств- ляется по окончании прокатки очередного рулона.
13
Таким образом, благодаря применению предлагаемого устройства стало возможным снижение продольной разно- ТОЛ1Щ-1ННОСТИ за счет форсирования процесса регулирования,, вьфажаемого в уменьшении длины полосы, необходимой для отработки возмущающего воздействия .
Применение устройства позволяет I стабилизировать характер переходного I процесса при изменении козффициента пластической деформации прокатываемого материала за счет корректировки общего коэффициента усиления контура регулирования толщины полосы, что ст л о возможным благодаря точному учету переменного транспортного запаздывания, и рациональному выбору.идентификационного участка переходного процесса.
Формула изобретения
1, Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане, содержащее измеритель толщины, выход которого соединен с первым входом блока рассогласования, второй вход которого соединен с входрм задатчика толщины полосы,выход блока рассогласования соединен с входом регулятора толщины полосы, систему управления скоростью или/и усилием прокатки и датчик импульсов, механически соединенный с измерительным валом, отличающееся тем, что, с целью снижения продольной разнотолщинности за счет форсирования процесса регулирования и его стабилизации при изменении коэффициента пластической деформации прокатываемого материала, устройство снабжено моделью объекта, двумя блоками транспортного запазды
вания, дИ1М еренциатором, функирсональ ным преобразователем, блоком временного запаздывания, двумя блоками умножения и интегратором со смещением, причем выход регулятора толщины поло сы соединен с входами-модели объек та н дифференциатора и первым входом первого блока умножения, выход которого соединен с входом системы уп- . равления скоростью или/и усилием прО катки, выход модели объекта соединен с третьим входом блока рассогласования и с информационным входом первого блока транспортного запаздыва
4714
ния, выход которого соединен с четвертым входом блока рассогласования, выход датчика импульсов соединен с управляюпщми входами обоих блоков транспортного запаздьтания и интегратора со смещением, выход дифференциатора соединен с входом функцио- напьного преобразователя, выход которого соединен с входом блока временного запаздывания, выход которого соединен с инфopмali oнным входом второго блока транспортного запаздыва-
15
20
25
30
35
40
45
50
55
входом второго блока умножения, первый вход которого соедийен с выходом блока рассогласования, а выход - с информационным входом интегратора со смеп ением, выход которого соединен с вторым входом первого блока умножения .
2. Устройство по п. 1, отличающееся тем, что интегратор со смещением содержит блок положительной односторонней проводимости, блок отрицательной односторонней проводимости, инвертор, два преобразователя напряжение - последовательный код, реверсивный счетчик, цифроана- логовый преобразователь, сумматор и задатчик напряжения смещения, причем входы блоков односторонней проводимости соединены между собой и явля ются информационным входом интегратора со смещением, управляющие входы преобразователей напряжение - последовательный код также соединены между .собой и являются управляющим входом интегратора со смещением, выход блока положительной односторонней проводимости соединен с информационным входом первого преобразователя напряжение - последовательный код, выход которого соединен с суммирую- щим входом реверсивного счетчика, выход блока отрицательной односторонней проводимости соединен последовательно с инвертором, с информадаонным входом второго преобразователя напряжение - последовательный код и вычи- таюп(им входом реверсивного счетчика, выход которого последовательно соединен с цифроаналоговым преобразователем и первым входом сумматора, второй вход которого соединен с задатчи- ком напряжения смещения, выход сум- матора является выходом интегратора со смещением.
3, Устройство .по п. 1, о т л и - :чающееся тем, что блок транспортного запаздывания содержит аналого-цифровой преобразователь, п запоминаюп их регистров, п блоков задержки и цифроаналоговый преобразователь, .причем информационный вход блока транспортного запаздывания является также и информационным вхо- дом цифроаналогового преобразователя, выход которого соединен с последовательной цепочкой из п запоминающих регистров, вход последовательной цепочки из п блоков задержки соединен с управляющим входом п-го за- поминаюшего регистра и представляет . собой управлякнций вход блока транспортного запаздывания, выход блока задержки соединен с управляющим входом (п - i)-ro запоминающего регистра, где i 0,п-1, выход п-го блока задержки соединен с управляющи яходом аналого-цифрового преобразо вателя, выход п-го запоминающего регистра соединен с входом цифроаналогового преобразователя, выход которого представляет собой выход блока транспортного запаздывания.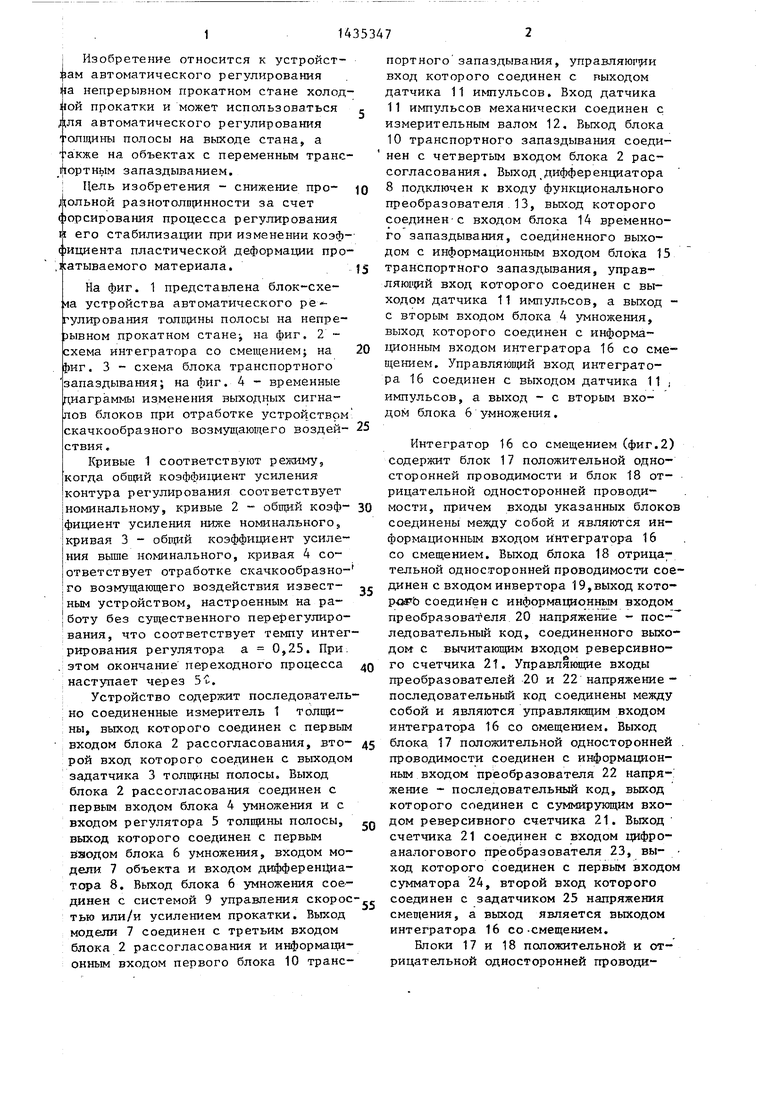



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования толщины покрытия жести | 1987 |
|
SU1437417A2 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| СИСТЕМА "ТОНКОГО" РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 1993 |
|
RU2065790C1 |
| Устройство для автоматического регулирования толщины полосы на непрерывном прокатном стане | 1982 |
|
SU1024135A1 |
| Фильтр низших частот для подавления резонанса контура регулирования параметра прокатки | 1983 |
|
SU1135510A1 |
| Система автоматического регулирования толщины полосы непрерывного стана горячей прокатки | 1977 |
|
SU733753A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |


Изобретение относится к устройствам автоматического регулирования на непрерывном прокатном стане хо лодной прокатки и может использоваться для автоматического регулирован т толщины полосы на выходе из стана, а также на объектах с переменным транс- портньм запаздыванием. Цель изобретения - снижение продольной разнотол- щинности и форсирования процесса ре- .гулирования и его стабилизации при изменении коэффициента пластической деформации прокатываемого материала. Моделирование транспортного запазды- вания осуществляют в темпе с процессом прокатки, что обеспечивает адекватность реальному транспортному за- паздьшанию. В процессе прокатки осуществляют контроль и коррекцию теку- щегр значения коэффициента усиления .контура регулирования толщины с целью его поддержания постоянным (номинальным), что-обеспечивает стабильное качество регулирования при изменении условий прокатки и значений коэффи- а циента пластической деформации прока тываемой полосы. 2 з.п. ф-лы, 4 шт. (Л с:
Гг
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU341550A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР N | |||
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОЛЩИНЫ полосы НА НЕПРЕРЫВНОМ ПРОКАТНОМ СТАНЕ | 0 |
|
SU326006A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для автоматического регулирования толщины полосы на непрерывном прокатном стане | 1982 |
|
SU1024135A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ,(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУ- ;ЛИРОВАНИЯ ТОЛЦИНЫ полосы НА НЕПРЕРЫВ- НОМ ПРОКАТНОМ СТАНЕ | |||
