NU
Oi
сд
QD О
Изобретение относится к измерн- телыюй технике и может быть Hcriojrb- эовано для преобразования измеряемог физического параметра в электрическ сигнал.
Цель изобретения - повышение точности преобразователя за счет полной коррекции . погрешности и линеаризации характеристики преобразования и упрощение его настройки.
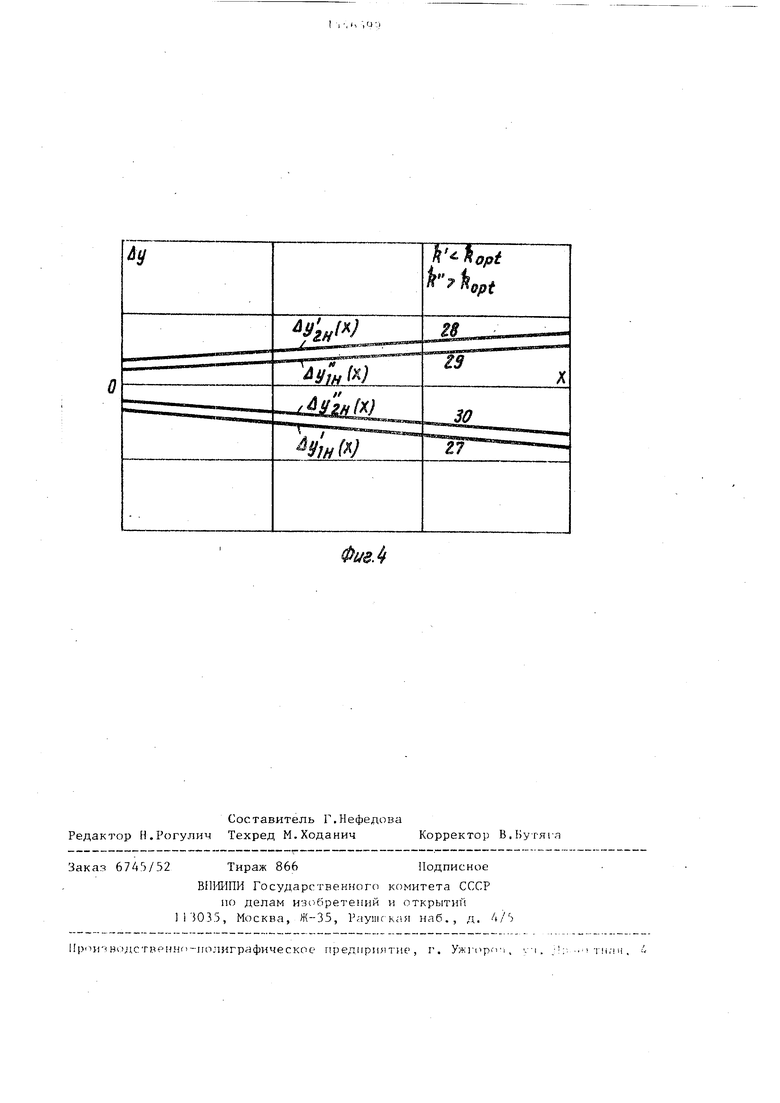
На фиг, 1 изображена структурная схема измерительного преобразователя с коррекцией характеристики; на фиг. 2 - зависимости изменения сигна лов в измерительном преобразователе от изменения контролируемого параметра; на фиг, 3 - завис шо.сти изменения погрешностей сигналов от изменения контролируемого параметра; на фиг. А зависимости погрешностей сигналов при различной степени коррекции.
Измерительный преобразователь (фиг.1) содержит информационный дат- чик 1, компенсационный датчик 2, первый и второй согласующие преобразователи 3 и 4, первый вычитатель 5, регистратор 6, второй вычитатель 7, сумматоры 8, задатчик 9 опорных сиг- налов, регулятор 10, умножитель 11, третий и четвертый вычитатели 12 и 13, первый и второй блоки 14 и 15 настройки, умножители 16 и 17 и усилитель 18.
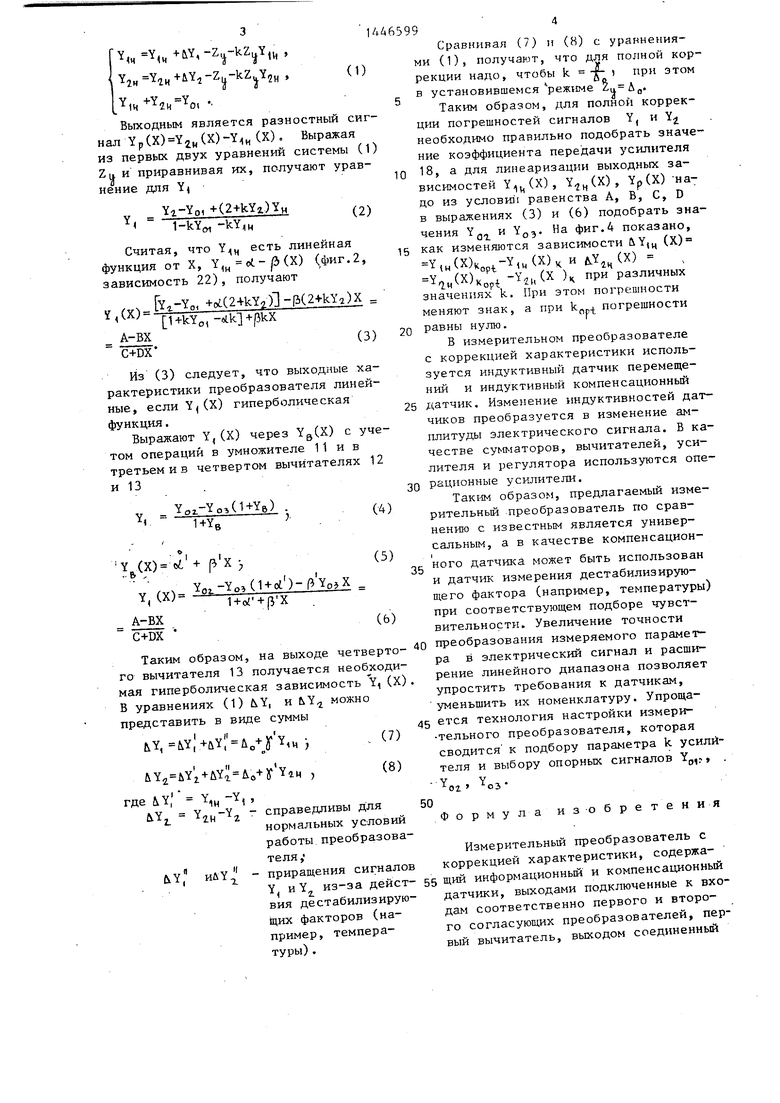
Графики (фиг,2) содержат зависимость 19 YjjCX) изменения сигнала на выходе первого согласующего преобразователя 3 от изменения параметра X, зависимость 20 сигнала Y,, на выходе BTOpoi o согласующего преобразователя 4, зависимость 21 У (X) изменения сигнала на выходе четвертого вычи- тателя 13 от изменения параметра X, зависимости 22 и 23 соответственно (Х) и Y2 (X) изменения сигналов на выходах сумматоров 8 первого и второго блоков 14 и 15 настройки от изменения параметра Х, зависимость 24 Y р (X) изменения сигнала на выходе первого вычитателя 5 от изменения параметра X,
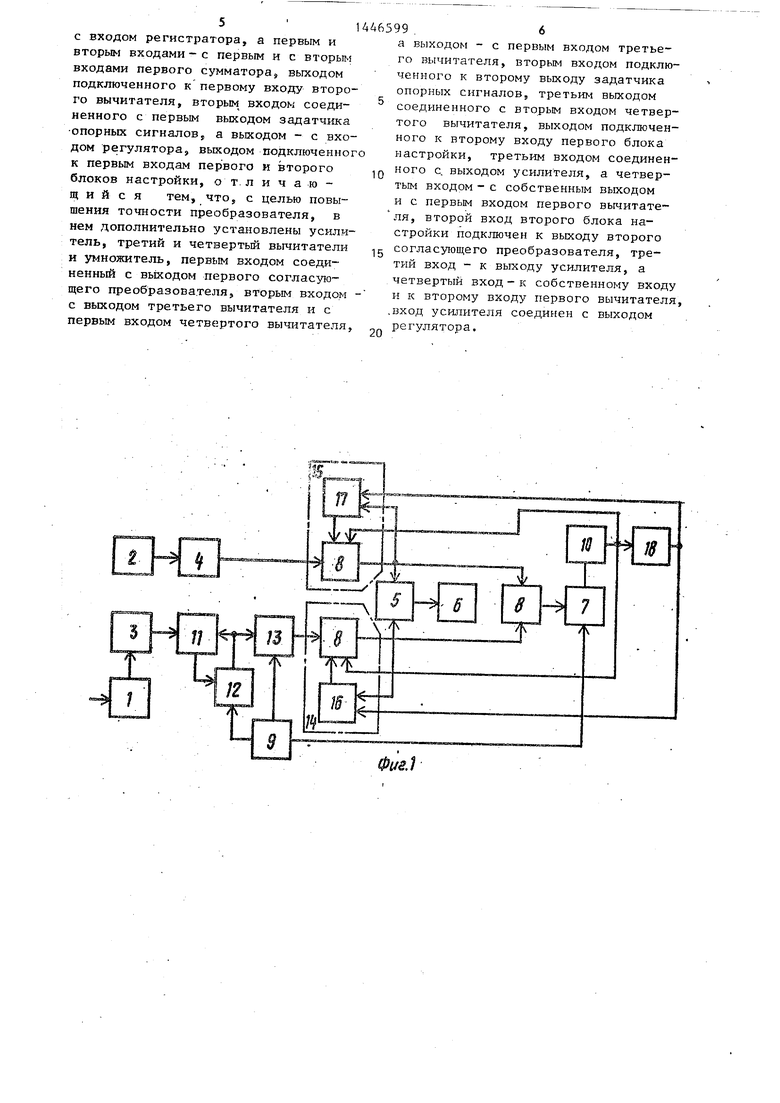
Графики (фиг.З) содержат зависимость 25. (Х) изменения погрешности сигнала Y, от изменения параметра X и значение 26 uY погрешности сигнала Y.
Графики (фиг,4) содержат зависимости 27 и 28 соответственно AY, (X)
и Y2(X) изменения погрешностей сигналов Fia выходах сумматоров 8 первого и второго блоков 14 и 15 настройки от изменения параметра X при неполной коррекции (. ) , зависимости 29 и 30 соответственно (X) и Y.J(X) изменения погрешностей тех же сигналов при
kii . k
opt
5 20
25 30
д
35
5
5
Преобразователь работает следующим образом.
Изменение измеряемого, параметра X с помощью информационного датчика 1 и первого согласующего преобразователя 3 преобразуется в изменение сигнала Yg(X) (фиг.2, зависимость 19), Компенсационный датчик 2 и второй согласующий преобразователь 4 вырабатывают сигнал 20 YJ,, величина которого зависит от дестабилизирующего фактора (например., температуры) и не зависит от параметра X. С помощью умножителя 11 и третьего и четвертого вычитателей 12 и 13 линейная зависимость 19 Yg(X) преобразуется в гиперболическую зависимость 22 Y,(X) (Фиг. 2). Сигналы Y, (Х) и (Х) поступают на входы сумматоров 8 первого и второго блоков 14 и 15 настройки, сумма выходных сигналов Y и с помощью соответствующего регулирования поддерживается постоянной и равной значению первого выходного сигнала Y р) задатчика 9 опорных сигналов ,Yo, , При этом становится зависргмым от X. Это происходит следующим образом.
Сигналы и складываются в сумматоре 8 преобразователя, и сумма сравнивается с опорным сигналом Yg, во втором вычитателе 7, На выходе второго вычитателя 7 появляется сигнал рассогласования Y, , который в регуляторе 10 преобразуется в управляющей сигнал Z, поступающий на вторые входы первого и второго блоков 14 и 15 настройки, и через усилитель 18 с коэффициентом передачи k поступает на входы умножителей 16 и 17, где перемножается с сигналами Y, и . Регулятор 10 может быть как статическим с максимально большим коэффициентом усиления, так и астатическим, содержащим интегратор. В устанопиншемся режиме получают следующие р.-1я игтня:
ч «4 +bY,.н
14 ги
IH Y
01
Выходным является разностный сигнал Yp(X)
Y5..CX) (X). Выражая
из первых двух уравнений системы (1)
Zif
нение для Yj
и приравнивая их, получают уравYg-Ypi +(2+kYi)YH
(2)
( 1-tY -kY . I K-IUM
Считая, что Y есть линейная функция от X, Y ct-р (X) (фиг.2, зависимость 22), получают
V , +c(24kY) (24-kYa)X UkYo,-«ikl+pkX
- А-вх/пл
c fra
Из (3) следует, что выходные характеристики преобразователя линейные, если Y((X) гиперболическая функция.
Выражают Y,(X) через Yg(X) с учетом операций в умножителе 11 и в третьем и в четвертом вычитателях 12 и 13
Y,
Yo2.-Yo,(1+Y6) . UYg
Y|(X)ot+ f X j
Y fyWYor-Yo(1 + )
1+o( + f} X A-BX
(6)
C+DX
Таким образом, на выходе четвертого вычитателя 13 получается необходимая гиперболическая зависимость Y, (X) В уравнениях (1) Y, и bY можно представить в виде суммы
(VY, t,Y;+йY ; ,ц .+йY Лo+lГ Ylн ,
(1)
сиг1А46599
Сравнивая (7) и (8) с ураннения- ми (1), получают, что для полной коррекции надо, чтобы k - ) при этом в установившемся режиме Zi, Ag.
Таким образом, для полной коррек
ции погрешностей сигналов Y, и Y необходимо правильно подобрать значение коэффициента передачи усилителя
10 18, а для линеаризации выходных зависимостей Y,,,(X), Y,(X), Yp(X) надо из условн равенства А, В, С, D в выражениях (3) и (6) подобрать значения YQ и YO,, На фиг.4 показано,
15 как изменяются зависимости Y,,. (Х)
н(х)к„„,)
opi
и Y, (X)
Y(X) i, -Y, (X ) при различных значениях k. При этом погрев1ности
20
25
30
меняют знак, а при k погрешности равны нулю.
Б измерительном преобразователе с коррекцией характеристики используется индуктивный датчик перемещений и индуктивный компенсационньпй датчик. Изменение индуктивностей датчиков преобразуется в изменение амплитуды электрического сигнала. В качестве суьматоров, вычитателей, усилителя и регулятора используются операционные усилители.
Так1Ф1 образом, предлагаемый изме- рительньй преобразователь по сравнению с известным является универсальным, а в качестве компенсационного датчика может быть использован и датчик измерения дестабилизирующего фактора (например, температуры) при соответствующем подборе чувствительности. Увеличение точности преобразования измеряемого параметра в электрический сигнал и расширение линейного диапазона позволяет упростить требования к датчикам, уменьшить их номенклатуру. Упроща- 45 ется технология настройки измери- тельного преобразователя, которая сводится к подбору параметра k усилителя и выбору опорных сигналов Y,.,, .
35
40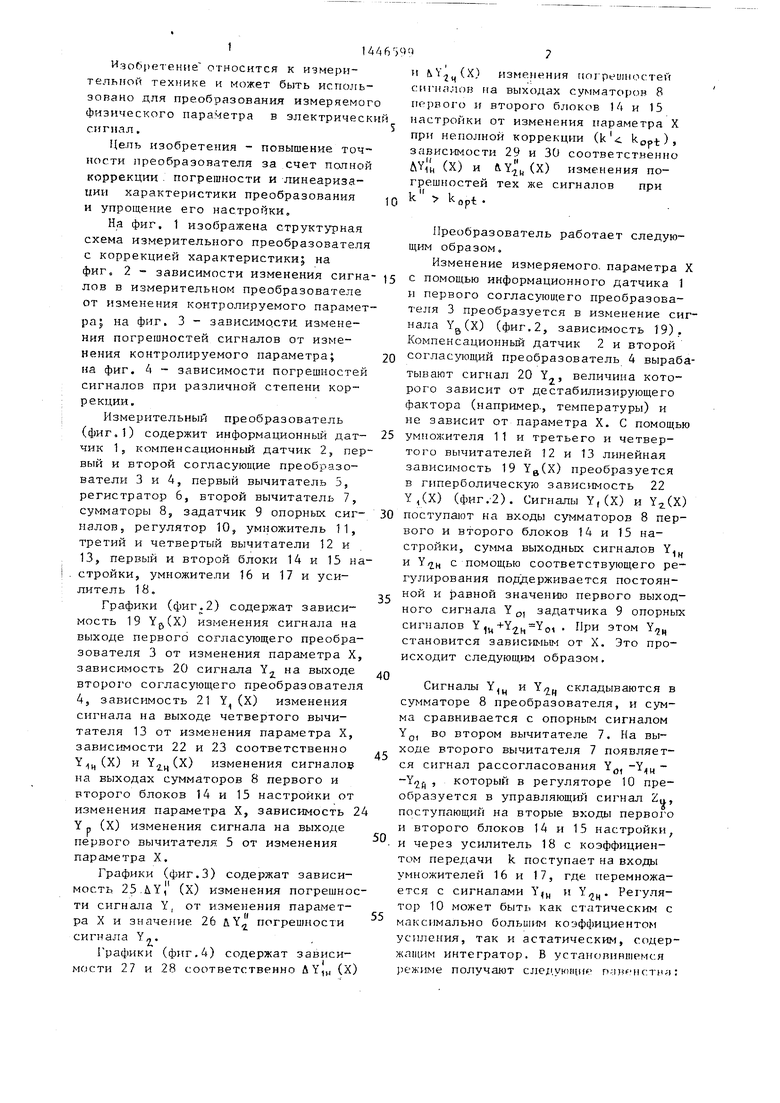
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и измерения параметров | 1980 |
|
SU947833A1 |
| Телеметрическое устройство | 1989 |
|
SU1674200A2 |
| Телеметрическое устройство | 1986 |
|
SU1399792A1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Устройство для распознавания прямого края объекта | 1988 |
|
SU1716549A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ В ГЕОЛОГОРАЗВЕДКЕ | 1993 |
|
RU2087927C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ СОСТОЯНИЯ АППАРАТУРЫ ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ | 1998 |
|
RU2132594C1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
Изобретение относится к технике преобразования физических параметров в электрический сигнал. В преобразователе решена задача увеличения его температурной стабильности и расширения динамического диапазона при заданной погрешности от нелинейности характеристики. Для этого в измерительном преобразователе, содержащем информадионный и компенсационный датчики и два преобразователя выходных параметров датчиков в электрические сигналы, сумму выходных сигналов сравнивают с опорным сигналом. Но сигналу рассогласования формируют управляющий сигнал с помощью регулятора. Затем формируются сигналы, равные погрешностям и противоположные им по знаку, которые складываются с соответствующими выходными сигналами. При этом полученные суммы сигналов поддерживаются постоянными, а выходным сигналом преобразователя является сигнал рассогласования. Коррекция осуществляется подбором коэффициента передачи одного усилителя. Лпя линеаризации выходной характеристики преобразователя зависимость информационного сигнала от измеря1чмого параметра гиперболизуется. 4 шт. с (Л
где Y; Y,
1Н 1
- Y
01 03
Y, иЛY.
справедливы д ля нормальных условий работы преобразователя ,
приращения сигналов Y, nY
50
Формула изобретения
Измерительный преобразователь с коррекцией характеристики, соДержа- из-за деист- 55 Щий информационный и компенсационный датчики, выходами подключенные к входам соответственно первого и второго согласующих преобразователей, первый вычитатель, выходом соединенный
ч i
ВИЯ дестабилизирующих факторов (например, температуры) .
- Y
01 03
50
с входом регистратора, а первым и вторым входами - с первым и с вторьп входами первого сумматора, выходом подключенного к первому входу второго вычитателя, вторым входом соединенного с первым выходом задатчика опорных сигналов, а выходом - с входом регулятора, выходом подключенног к первым входам первого и второго блоков настройки, о т. л и ч а ю - щ и и с я тем, что, с целью повышения точности преобразователя, в нем дополнительно установлены усилитель, третий и четвертый вычитатели и умножитель, первым входом соединенный с вьгходом первого согласующего преобразователя, вторым входом с выходом третьего вычитателя и с первым входом четвертого вычитателя.
а выходом - с первым входом третьего вычитателя, вторым входом подключенного к второму вькоду задатчика опорных сигналов, третьим выходом соединенного с вторым входом четвертого вычитателя, выходом подключенного к второму входу первого блока настройки, третьим входом соединенного с, выходом усилителя, а четвертым входом - с собственным выходом и с первым входом первого вьгчитате ля, второй вход второго блока настройки подключен к выходу второго согласующего преобразователя, третий вход - к выходу усилителя, а четвертый вход - к собственному входу и к второму входу первого вычитателя,
.вход усилителя соединен с выходом регулятора.
Фк§,Г
Фиг. 2
Фиг.З
УМ
-pffTpulBUJJJIJPu -
{)
| Устройство для измерения перемещений с частотным выходом | 1978 |
|
SU783566A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК ДИФФЕРЕНЦИАЛЬНЫХ ЧАСТОТНЫХ ДАТЧИКОВ | 1972 |
|
SU434329A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Измерительный преобразователь с коррекцией характеристики | 1985 |
|
SU1429088A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
