7777}(//// ifusi
«
(Л
4i
СО
СО
д
:ствующую С ЧЕСТЬЮ 3. Усилие пружины 8 равно массе части 3. Механизм при- водится в контакт с трубой 10 и пос- |лв ее захвата вместе с К 4 часть 3 iперемещается вверх для переноса трубы 10 с центра скважины на подсвечник. Клинья с плашками 5 и система 6 удерживаются относительно К 4 в положении удержания трубы 10 только после опоры нижнего конца ее на подсвечник. Вместе с клиньями и плапжами 5 К 4 под действием пружины 8 поворачивается относительно системы 6, выходя из контакта с трубой 10, 3 ил.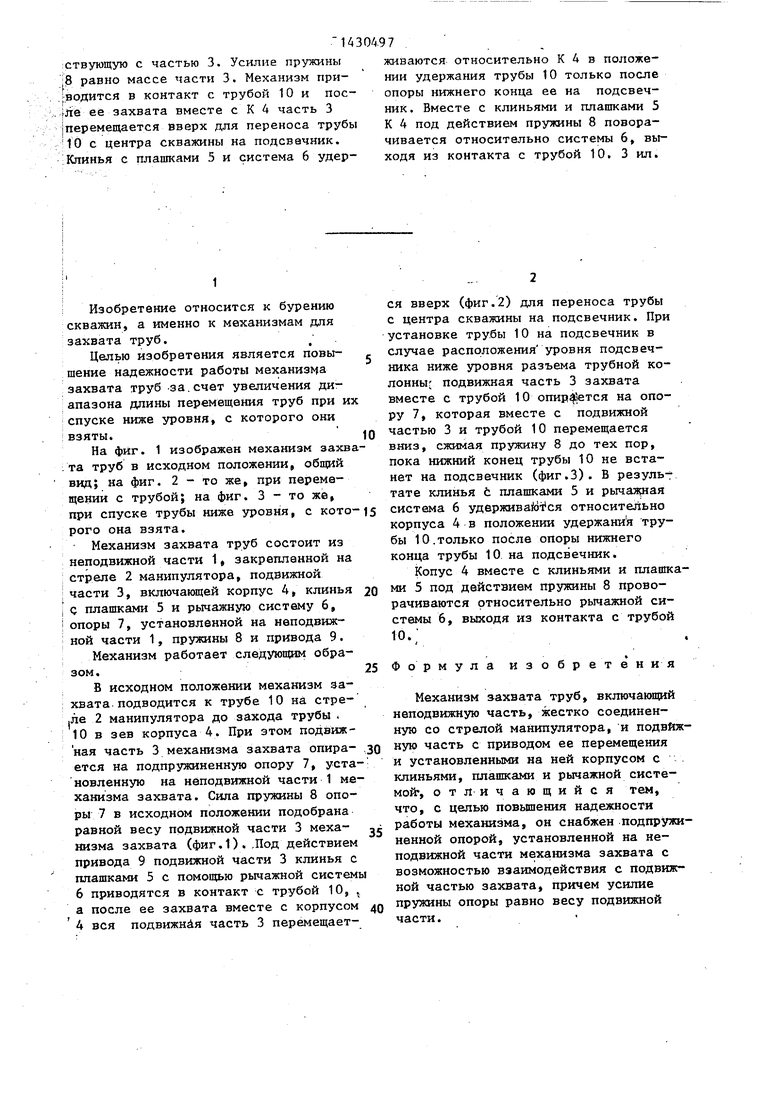
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм захвата свечи | 1990 |
|
SU1763634A1 |
| УСТРОЙСТВО для ПЕРЕНОСА И УСТАНОВКИ БУРИЛЬНЫХТРУБ | 1969 |
|
SU256685A1 |
| Механизм захвата свечи | 1974 |
|
SU549569A1 |
| Элеватор полуавтоматический | 1981 |
|
SU976013A1 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
| Устройство для перемещения труб в штангоприемник буровой вышки | 1989 |
|
SU1740615A1 |
| Элеватор | 1984 |
|
SU1208172A1 |
| БУРОВАЯ УСТАНОВКА | 1995 |
|
RU2100565C1 |
;1
; Изобретение относится к бурению скважин, а именно к механизмам для захвата труб./ .
Целью изобретения является повы- шение надежности работы механизма захвата труб за.счет увеличения диапазона длины перемещения труб при и спуске ниже уровня, с которого они взяты.
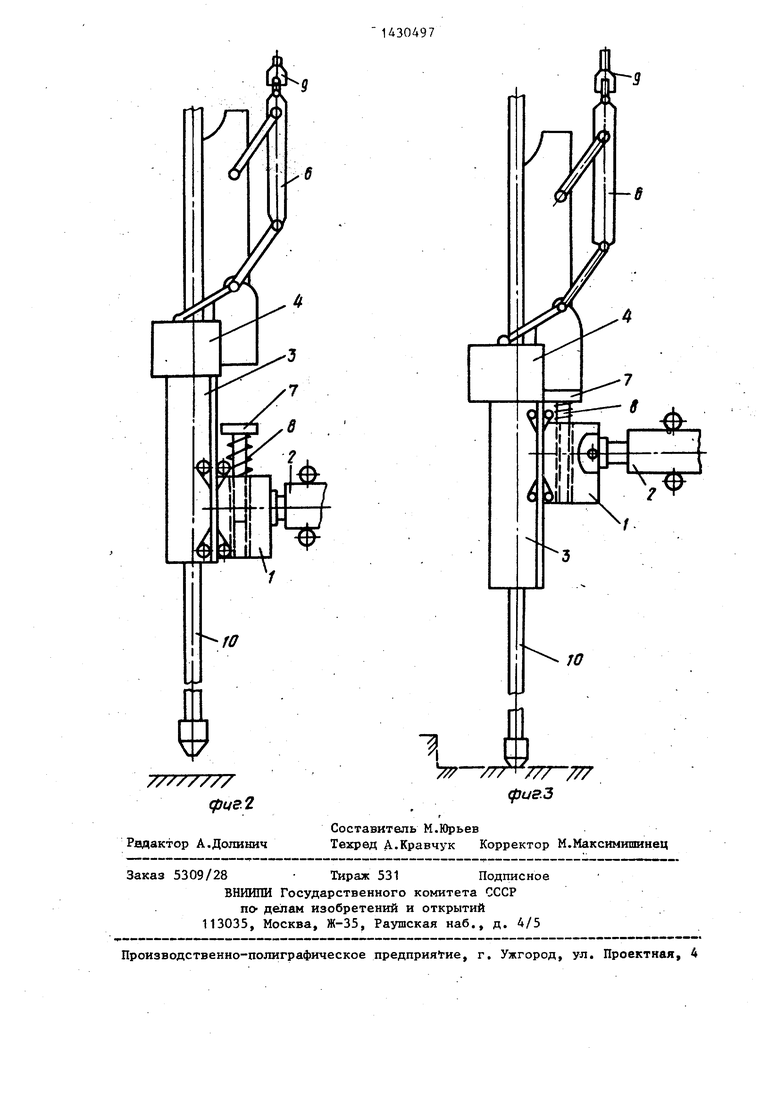
На фиг. 1 изображен механизм захв .та труб в исходном положении, общий вид; на фиг. 2 - то же, при перемещении с трубой; на фиг. 3 - то же, при спуске трубы ниже уровня, с кото рого она взята.
Механизм захвата труб состоит из неподвижной части 1, закрепленной на стреле 2 манипулятора, подвижной : части 3, включакяцей корпус 4, клинья I С плашками 5 и рычажную систему 6, опоры 7, установленной на нвподвиж- : НОЙ части 1, пружины 8 и привода 9.
Механизм работает следующим образом.
В исходном положении механизм захвата, подводится к трубе 10 на. стре- |Ле 2 манипулятора до захода трубы . : 10 в зев корпуса 4. При этом подвижная часть 3 механизма захвата опира- ется на подпружиненную опору 7, уста новленную на неподвижной части 1 механизма захвата. Сила пружины 8 опоры 7 в исходном положении подобрана равной весу подвижной части 3 меха- низма захвата (фиг.1). .Под действием привода 9 подвижной части 3 клинья с плашками 5 с помощью рычажной систем 6 приводятся в контакт с трубой 10, а после ее захвата вместе с корпусом 4 вся подвижная часть 3 перемещается вверх (фиг.2) для переноса трубы с центра скважины на подсвечник. При установке трубы 10 на подсвечник в случае расположения уровня подсвечника ниже уровня разъема трубной колонны; подвижная часть 3 захвата вместе с трубой 10 на опору 7, которая вместе с подвижной частью 3 и трубой 10 перемещается вниз, сжимая пружину 8 до тех пор, пока нижний конец трубы 10 не встанет на подсвечник (фиг.З). В резуль-г тате клинья t плашками 5 и рычая ная система 6 удерживаемся относительно корпуса 4 в положении удержани я трубы 10.только после опоры нижнего конца трубы 10 на подсвечник.
Копус 4 вместе с клиньями и платками 5 под действием пружины 8 проворачиваются относительно рычажной системы 6, выходя из контакта с трубой
Формула изобретения
Механизм захвата труб, включанщий неподвижную часть, жестко соединенную со стрелой манипулятора, и подвижную часть с приводом ее перемещения и установленными на ней корпусом с клиньями, плашками и рычажной системой, отличающийся тем, что, с целью повышения надежности работы механизма, он снабжен подпружиненной опорой, установленной на неподвижной части механизма захвата с возможностью взаимодействия с подвижной частью захвата, причем усилие пружины опоры равно весу подвижной части.
фцг2
Редактор А.Долинич
Составитель М.Юрьев
Техред А.Кравчук Корректор М.Максимишинец
| УСТРОЙСТВО для ПЕРЕНОСА И УСТАНОВКИ БУРИЛЬНЫХТРУБ | 0 |
|
SU256685A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механизм захвата свечи | 1974 |
|
SU549569A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
