Известны устройства для переноса и установки бурильных труб, состояодие из захвата с клиньями. Такие устройства недостаточно надежны, сложны по конструкции, а также довольно тяжелы.
Предлагаемое устройство с целью обеспечения надежности в работе выполнено в виде перемещающихся на уровне верхних полатей в горизонтальной плоскости во взаимно перпендикулярных направлениях тележки и вмонтированной в нее стрелы, на конце которой закреплен подвижный в вертика«1ьном направлении захват труб, приводимый в движение механизмом подъема, состояо;ий из корпуса с подвижными плашками, предохрлиительпым фиксатором, копирным приспособлением и клиновым наголовником.
Тележка и стрела перемеиадются при помощи механического привода путем перекатывания ведущей и двух паразитных звездочек но неподвижной цепи, что упрощает конструкцию.
Во избежание передачи веса бурильных труб на стрелу захват труб подвешен на канате, закренленном на механизме подъема.
Для установки труб на подсвечник ниже уровня, с которого они берутся, захват труб снабжен подпружиненным копиром и рычажной системой открывающими плащки.
Для раздельного захвата и подъема труб механизм подъема выполпен в виде двух спаренных приводов, например пневлюцнлиндров, один щток которых, закрепленный на неподвижном основании, захватывает трубы, а другой, соединенный при помощи каната с захватом труб, предназначен для их подъема. Корпус захвата труб снабжен подпружиненным фиксатором, обеспечивающим падежное захватывание.
Чтобы поднятая труба не могла унасть при разрыве пневмоприводов, пневмоцилиндр для захватывания труб снабжен предохранительным приспособление.м в виде вмонтированной
в дополнительный пневмоцилиндр полтиружиненной собачки.
На фиг. 1 изображен общий вид yrrpoiicTва; па фиг. 2 - общий вид механизма расстановки труб с механизмом их захвата; на
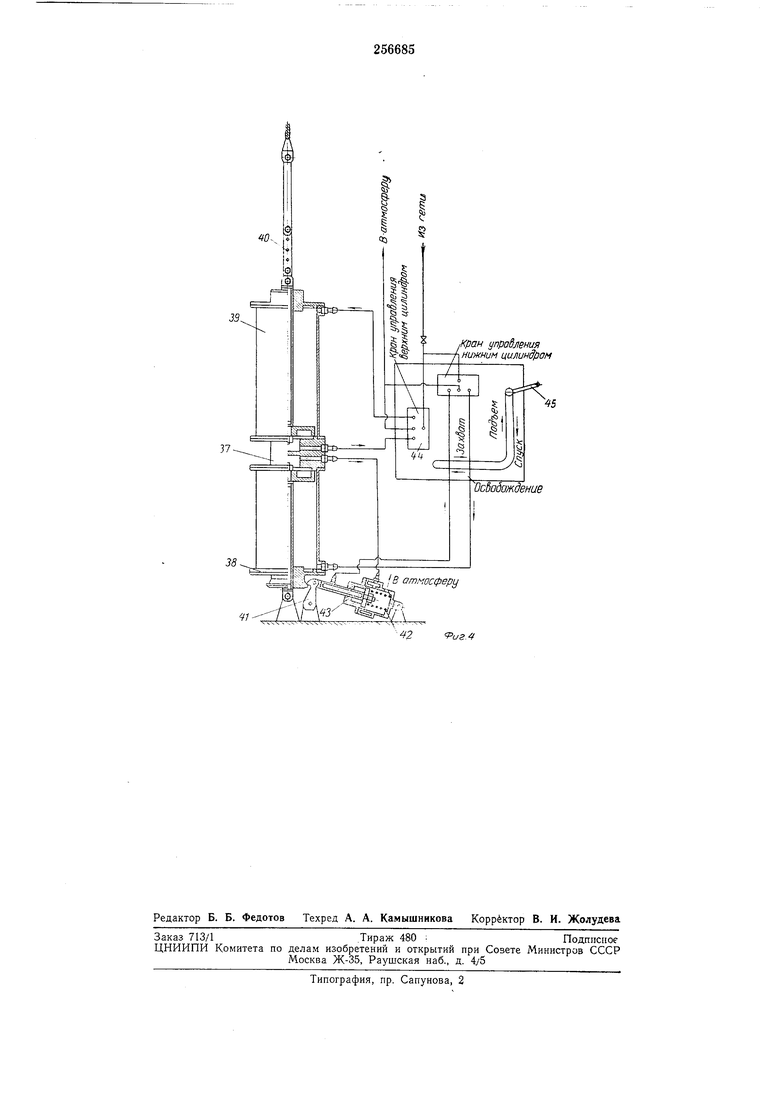
фиг. 3 - механизм захвата труб; на фиг. 4 - схе.ма механизма подъема.
Устройство состоит из механизма / расстановки труб, механизма 2 их захвата, механизма 3 подъема, каната 4, блока 5, верхнего магазина 6, иульта 7, станции управления 8, подсвечника 9 и центратора 10.
Механизм / расстановки труб, моитируекоторым перемещается на катках телел ка 13. Внутри тележки имеются два гнезда, оборудованные катками М, по которым передвигается перпендикулярно движению тележки стрела 15. Стрела и телел :ка движутся в горизонтальной плоскости. Перемещения стрелы и тележки осуп;есгвляются электродвигателем 16 через червячный редуктор 17 с ведущей звездочкой 18, две паразитные звездочки 19 и цепь 20, огибающую ведущую и паразитные звездочки. Оба конца цепи закреплены неподвижно, а ведущая звездочка, вращаясь, перекатывается по цепи и перемещает соответственно тележку или стрелу. На конце стрелы закреплен механизм 2 захвата труб. Включая поочередно приводы стрелы и тележки его перемещают к оси скважины и в соответствующую секцию магазина. Механизм захвата труб состоит из подвижной 21 и неподвижной 22 частей. Неподвижная часть закреплена на конце стрелы шарнирно горизонтальной осью 23. Корпус неподвижной части имеет гнездо, оборудованное направляющими роликами 24, по когорым перемещается в вертикальной плоскости подвижная часть механизма. На неподвижной части закреплеп копир 25 с амортизатором 26. Последний удерживает копир в вертикальном положении при перемещении но пему неподвижной части без свечи и позволяет копиру поворачиваться, когда она движется с захваченной свечой, что создает возможность устанавливать трубы ниже уровня, с которого они были взяты. Подвижная часть механизма захвата труб подвещена на канате 4 механизма 3 подъема так, чтобы она не опиралась на неподвижную часть. На ее металлическом корпусе закреплены скоба 27, наголовник 28 и рычажная система 29 с тягой 30. Скоба 27 имеет два наKvTOHHbix «ласточкиных паза, в которых перемещаются клинья 31 с быстросъемными губками 32 (плащками). размера, соответствующего диаметру бурильных труб. Опускаясь, клинья сближаются и сжимают губками трубу. Для падежного захватывания труб губками в скобе имеется предохрапительный фиксатор 33, который под действием пружины 34 выдвинут в «ласточкин наз и препятствует опусканию клиньев, пока труба не нажмет на фиксатор и займет в механизме положение, обеспечивающее полный захват ее губками. Механизм захвата труб подводят к трубе до упора в нее роликов 35, затем поднимают подвижную часть. При этом ролик 36 перекатывается по копиру 25, поворачивается рычажная система 29 и клинья, опустивщись, захватывают трубу. Далее подвижная часть поднимается с трубой. При опускании подвижной части с грубой из крайнего верхнего положения в случае установки трубы ниже уровня, с которого была взята, ролик 36, касаясь копира, поворачивает его, амортизатор 26 до тех пор, ridка труба не коснется опоры. Как только подвижная часть разгрузится от тяжести трубы при дальнейшем опускапии, копир под действием пружины амортизатора возвратится в исходное положение, повернет рычажную систему, ноднимет клинья и освободит трубу. Подъем и спуск подвижной части механизма захвата трубы производится механизмом 5 подъема трубы посредством каната 4, перекинутого через ролик 5 на кронблочной площадке. Механизм подъема трубы представляет собой пневматический подъемник, состоящий из двух пневмоцилиндров двойного действия, соединенных между собой соосно на нроставке 37. Шток нижнего цилиндра 38 прикреплен на кронштейне к выщке, а щток верхнего цилиндра 39 соединен канатом 4 и регулировочными планками 40 с механизмом захвата труб. При полностью убранном щтоке нижнего цилиндра механизм захватывает трубу, а при полностью выдвинутом щтоке труба освобождается. Шток верхнего цилиндра перемещает механизм захвата с трубой, который поднимает или опускает ее. В убранном положении щток нижнего цилиндра запирается защелкой 41 под действием прулсины 42 дополнительного пневмоцилиндра 43, благодаря чему труба надежно удерживается в механизме захвата в случае надения давления в цилиндре, разрыва воздухопровода или других повреждений. Для выдвижения щтока нижнего цилиндра воздух сначала поступает в дополпительный цилиндр и открывает защелку. После этого он проникает в цилиндр и выдвигает его щток, в результате чего механизм захвата опуекается и освобождает трубу. Пневмоцилиндры управляются двумя спаренными сальниковыми кранами 44 посредством рукоятки 45. Предметизобретения 1. Устройство для переноса и установки бурильных труб, состоящее из захвата с клиньями, отличающееся тем, что, с целью обеспечения надежности в работе, оно выполнено в виде перемещающихся на уровне верхних полатей в горизонтальной плоскости во взаимно перпепдикулярных направлениях тележки и вмонтированной в нее стрелы, на конце которой закреплен подвижной в вертикальном направлении захват труб, приводимый в движение механизмом подъема, состоящий из корпуса с подвижными плащками, предохранительным фиксатором, копирным приспособлением и клиновидным наголовником. 2. Устройство по п. 1, отличающееся тем, что для упрощения конструкции перемещение тележки и стрелы осуществляется при помощи механического привода путем перекатывания ведущей и двух паразитных звездочек по непо3.Устройство по п. 1, отличающееся тем, что во избежание передачи веса бурильных труб на стрелу захват труб подвешен на канате, закрепленном на механизме подъема.
4.Устройство по п. I, отличающееся тем, что для установки бурильных труб на подсвечник ниже уровня, с которого они берутся, захват труб снабжен подпружиненным копиром и рычажной системой, открывающими плашки захвата.
5.Устройство по п. 1, отличающееся тем, что для раздельного захвата и подъема труб механизм подъема выполнен в виде двух спаренных приводов, например пневмоцилиндров, один шток которых, закрепленный на неподвижном основании, предназначен для захватывания труб, а другой, соединенный при помош,и каната с захватом труб, предназначен для их подъема.
6. Устройство ПО П. 1, отличающееся тем, что для обеспечения надежности захватывания труб корпус захвата снабжен подпружиненным фиксатором. 7. Устройство по п. 1, отличающееся тем,
что для Предупреждения падения поднятой трубы при разрыве пневмоцилиндров пневмоцилиндр для захватывания труб снабжен предохранительным .приспособлением в виде вмонтированной в дополнительный пневмоцилиндр подпружиненной собачки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
| БУРОВАЯ УСТАНОВКА | 1995 |
|
RU2100565C1 |
| Механизм захвата свечи | 1974 |
|
SU549569A1 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| Устройство для смазки резьбы свечей бурильных труб переносимых механизмом расстановки | 1975 |
|
SU655809A1 |
| УСТРОЙСТВО для ЗАМЕНЫ ОБОЖЖЕННЫХ АНОДОВ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 1973 |
|
SU383757A1 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
| АВТОМАТ ДЛЯ ОТРЕЗКИ И ЗЕНКОВАНИЯ ТРУБОК | 1973 |
|
SU366035A1 |
| Устройство для крепления механизма расстановки свечей бурильных труб | 1980 |
|
SU883317A1 |
| Механизм захвата свечи | 1990 |
|
SU1763634A1 |


35
W,
r
IB атг осферу
uS-4