Изобретение относится к технике электрорадиоизмерений и может быть использовано для измерения сдвига фаз с повышенной точностью и помехоустойчивостью,g
Цель изобретения - повышение точ- ности измерения и быстродействия.
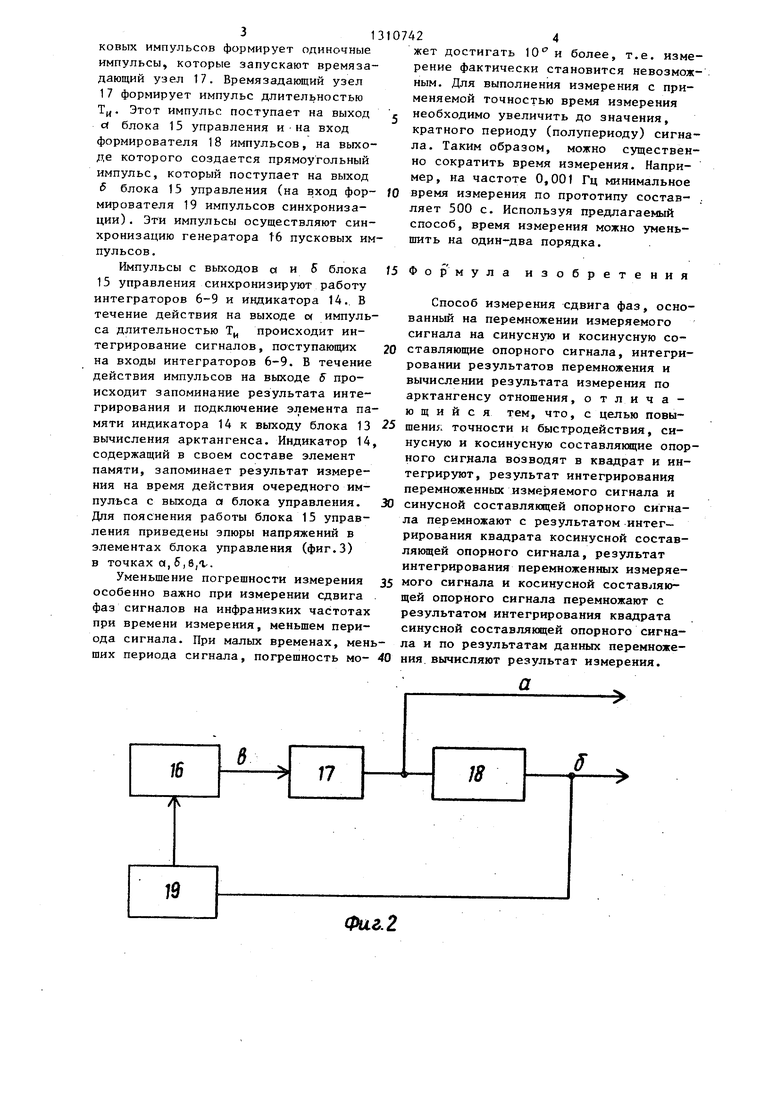
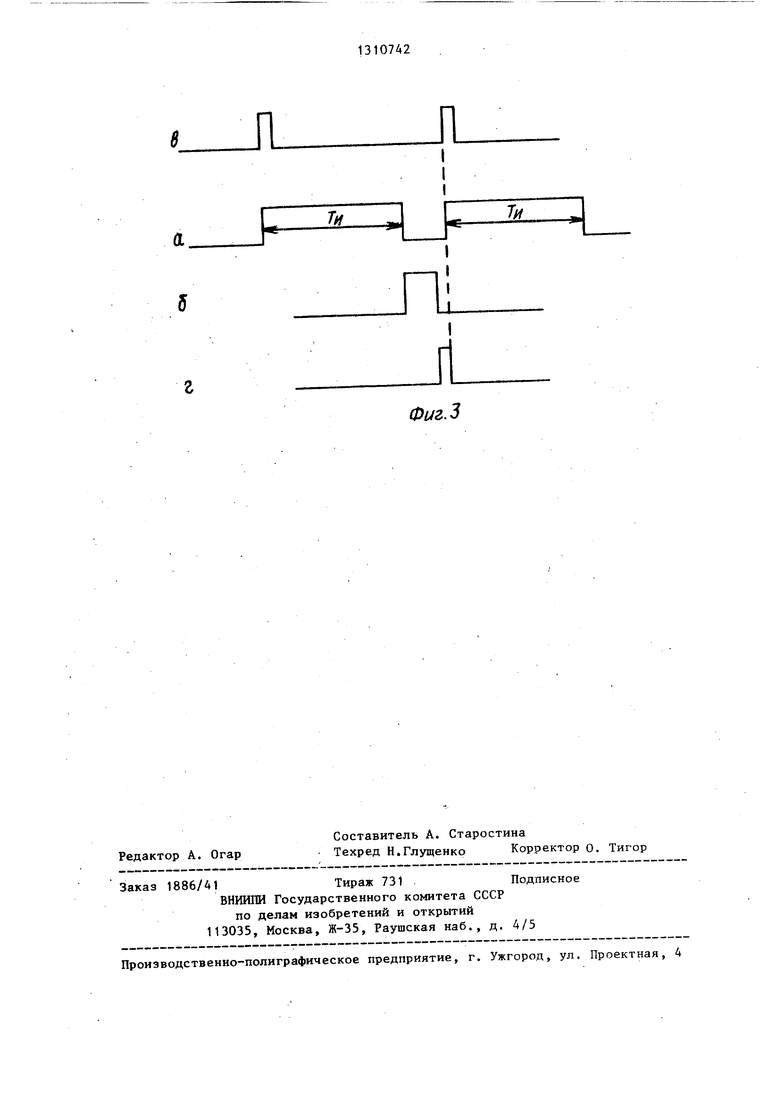
На фиг, 1 приведена структурная схема устройства для реализации предлагаемого способа; на фиг. 2 - струк- fO турная съема блока управления; на фиг. 3 - эпюры напряжения в блоке управления.
Устройство состоит из генератора 1 опорного напряжения, вход которого )5 подключен к входу опорного сигнала, первого 2 и второго 3 перемножителей, входы которых подключены к входу измеряемого сигнала и выходам генератора опорного напряжения, первого 4 и 20 второго 5 квадраторов, входы которых подключены к выходу генератора 1 опорного напряжения, интеграторов 6- 9, входы которых подключены соответственно к выходам первого 2 и вто- 25 рого 3 перемножителей и первого 4 и второго 5 квадраторов, третьего 10 и четвертого 11 перемножителей, входы которых подключены соответственно к выходам первого 6 и третьего 8 ин- 30 теграторов и второго 7 и.четвертого 8 интеграторов, блока 12 измерения отношения, входы которого подключены к выходам третьего 10 и четвертого 11 перемножителей, блока 13 вычисле- 35 ния арктангенса, вход которого подключен к выходу блока 12 измерения отношения, индикатора 14 и блока 15 управления, выходы которого подклюисточника по входу опорного сигнала. На выходе первого интегратора 6 формируется сигнал
Г /2
J,s
.S(t)S(t)dt,
os
где S
OS
(t) - синусная
составляющая опорного сигнала с выхода генератора 1 опорного напряжения. На выходе второго интегратора 7
формируется сигнал Ти/2
/3 5 S(t)Soc(t)dt,
-Т„/2
косинусная составляющая
опорного сигнала с выхода генератора 1 опорного напряжения.
Кроме того, синусная и косинусная составляющие опорного сигнала с выхода генератора 1 опорного напряжения возводятся в квадрат при помощи первого 4 и второго 5 квадраторов. На выходе третьего интегратора 8 формигде
SocCt) руется
сигнал
Ти/2
5 s,|(t)dt,
-Ти/2
на выходе четвертого сигнал
Ти/2
/
интегратора 9 Sol (t)dt.
Сигналы ot и ft поступают на третий 10 и четвертый 11 перемножители, на выходах которых формируются сигна 4ены к управляющим входам интеграто- 40 лы, соответственно равные dp к с /} .
ров 6-9 и индикатора 14,
Блок 15 управления состоит из генератора 16 пусковых импульсов, вре- мязадающего узла 17, формирователя 18 импульсов и формирователя 19 импульсов синхронизации, последовательно связанных между собой.
Устройство для осуществления предлагаемого способа работает следующим образом.
На первый 2 и второй 3 перемножители поступают измеряемый сигнал с входа измеряемого сигнала, а также квадратурные (синусная и косинусная) составляющие опорного сигнала с выходов генератора 1 опорного напряжения. Генератор 1 опорного напряжения может работать в автономном режиме либо синхронизироваться от внешнего
В блоке 12 измерения отношения производится измерение отношения этих величин и формируется сигнал о, 3/of/3, который поступает на вычислитель 13 45 арктангенса этой величины. На индикаторе 14 формируется результат измерения фазового сдвига измеряемого сигнала относительно опорного:
50
t/
HJAI
arct
что соответствует результату с минимальной погрешностью.
55 Синхронизаздаю работы интеграторов и индикатора осуществляет блок 15 управления.
Блок управления (фиг.2) работает следукщим образом. Генератор 16 пусазйg
13107422
источника по входу опорного сигнала. На выходе первого интегратора 6 формируется сигнал
Г /2
J,s
.S(t)S(t)dt,
os
где S
OS
(t) - синусная
составляющая опорного сигнала с выхода генератора 1 опорного напряжения. На выходе второго интегратора 7
формируется сигнал Ти/2
/3 5 S(t)Soc(t)dt,
-Т„/2
косинусная составляющая
опорного сигнала с выхода генератора 1 опорног напряжения.
Кроме того, синусная и косинусная составляющие опорного сигнала с выхода генератора 1 опорного напряжения возводятся в квадрат при помощи первого 4 и второго 5 квадраторов. На выходе третьего интегратора 8 формигде
SocCt)
сигнал
Ти/2
5 s,|(t)dt,
-Ти/2
де четвертого
Ти/2
/
интегратора 9 Sol (t)dt.
Сигналы ot и ft поступают на третий 10 и четвертый 11 перемножители, на выходах которых формируются сигна40 лы, соответственно равные dp к с /} .
В блоке 12 измерения отношения производится измерение отношения этих величин и формируется сигнал о, 3/of/3, который поступает на вычислитель 13 45 арктангенса этой величины. На индикаторе 14 формируется результат измерения фазового сдвига измеряемого сигнала относительно опорного:
50
t/
HJAI
arct
что соответствует результату с минимальной погрешностью.
55 Синхронизаздаю работы интеграторов и индикатора осуществляет блок 15 управления.
Блок управления (фиг.2) работает следукщим образом. Генератор 16 пусковых импульсов формирует одиночные импульсы, которые запускают времяза- дающий узел 17. Времязадающий узел 17 формирует импульс длительностью Тр,. Этот импульс поступает на выход
жет достигать 10 и более, т.е. измерение фактически становится невозможным. Для выполнения измерения с применяемой точностью время измерения 2 необходимо увеличить до значения, кратного периоду (полупериоду) сигнала. Таким образом, можно существенно сократить время измерения. Например, на частоте 0,001 Гц минимальное время измерения по прототипу составляет 500 с. Используя предлагаемый способ, время измерения можно уменьшить на один-два порядка.
W
с4 блока 15 управления и на вход формирователя 18 импульсов, на выходе которого создается прямоугольный импульс, который поступает на выход 5 блока 15 управления (на вход формирователя 19 импульсов синхронизации) . Эти импульсы осуществляют синхронизацию генератора 16 пусковых импульсов.
Импульсы с выходов а и 5 блока 15 Формула 15 управления синхронизируют работу интеграторов 6-9 и индикатора 14.. В течение действия на выходе а импульса длительностью Т, происходит интегрирование сигналов, поступающих на входы интеграторов 6-9. В течение действия импульсов на выходе 5 происходит запоминание результата интегрирования и подключение элемента памяти индикатора 14 к выходу блока 13 25 шения точности и быстродействия, си- вычисления арктангенса. Индикатор 14, нусную и косинусную составлякицие опор содержащий в своем составе элемент ного сигнала возводят в квадрат и интегрируют, результат интегрирования перемноженных измеряемого сигнала и 30 синусной составляющей опорного сигнала перемножают с результатом интегрирования квадрата косинусной составляющей опорного сигнала, результат интегрирования перемноженных измеряе- 35 мого сигнала и косинусной составляющей опорного сигнала перемножают с результатом интегрирования квадрата синусной составляющей опорного сигна- ода сигнала. При малых временах, мень- ла и по результатам данных перемноже- ших периода сигнала, погрешность мо- 40 ния. вычисляют результат измерения.
изобрете ния
Способ измерения сдвига фаз, основанный на перемножении измеряемого сигнала на синусную и косинусную со- 20 ставляющие опорного сигнала, интегрировании результатов перемножения и вычислении результата измерения по арктангенсу отношения, отличающийся тем, что, с целью повыпамяти, запоминает результат измерения на время действия очередного импульса с выхода а блока управления. Для пояснения работы блока 15 управления приведены эпюры напряжений в элементах блока управления (фиг.З) в точках а, 5,6,1-.
Уменьшение погрешности измерения особенно важно при измерении сдвига фаз сигналов на инфранизких частотах при времени измерения, меньшем перижет достигать 10 и более, т.е. измерение фактически становится невозможным. Для выполнения измерения с применяемой точностью время измерения необходимо увеличить до значения, кратного периоду (полупериоду) сигнала. Таким образом, можно существенно сократить время измерения. Например, на частоте 0,001 Гц минимальное время измерения по прототипу составляет 500 с. Используя предлагаемый способ, время измерения можно уменьшить на один-два порядка.
и быстродействия, си- сную составлякицие опор зводят в квадрат и инльтат интегрирования змеряемого сигнала и ляющей опорного сигнас результатом интегата косинусной состав сигнала, результат перемноженных измеряе- косинусной составляюгнала перемножают с егрирования квадрата ляющей опорного сигна- атам данных перемноже- езультат измерения.
изобрете ния
Формула шения точности и быстродействия, си- нусную и косинусную составлякицие опор ного сигнала возводят в квадрат и интегрируют, результат интегрирования перемноженных измеряемого сигнала и синусной составляющей опорного сигнала перемножают с результатом интегрирования квадрата косинусной составляющей опорного сигнала, результат интегрирования перемноженных измеряе- мого сигнала и косинусной составляюей опорного сигнала перемножают с езультатом интегрирования квадрата синусной составляющей опорного сигна- а и по результатам данных перемноже- ния. вычисляют результат измерения.
Способ измерения сдвига фаз, основанный на перемножении измеряемого сигнала на синусную и косинусную со- ставляющие опорного сигнала, интегрировании результатов перемножения и вычислении результата измерения по арктангенсу отношения, отличающийся тем, что, с целью повыФиг. 2
в
Редактор А. Огар
Составитель А. Старостина
Техред Н.Глущенко Корректор о. Тигор
Заказ 1886/41Тираж 731Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
- ------ -- - --- -- ---- -- -- -,
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.З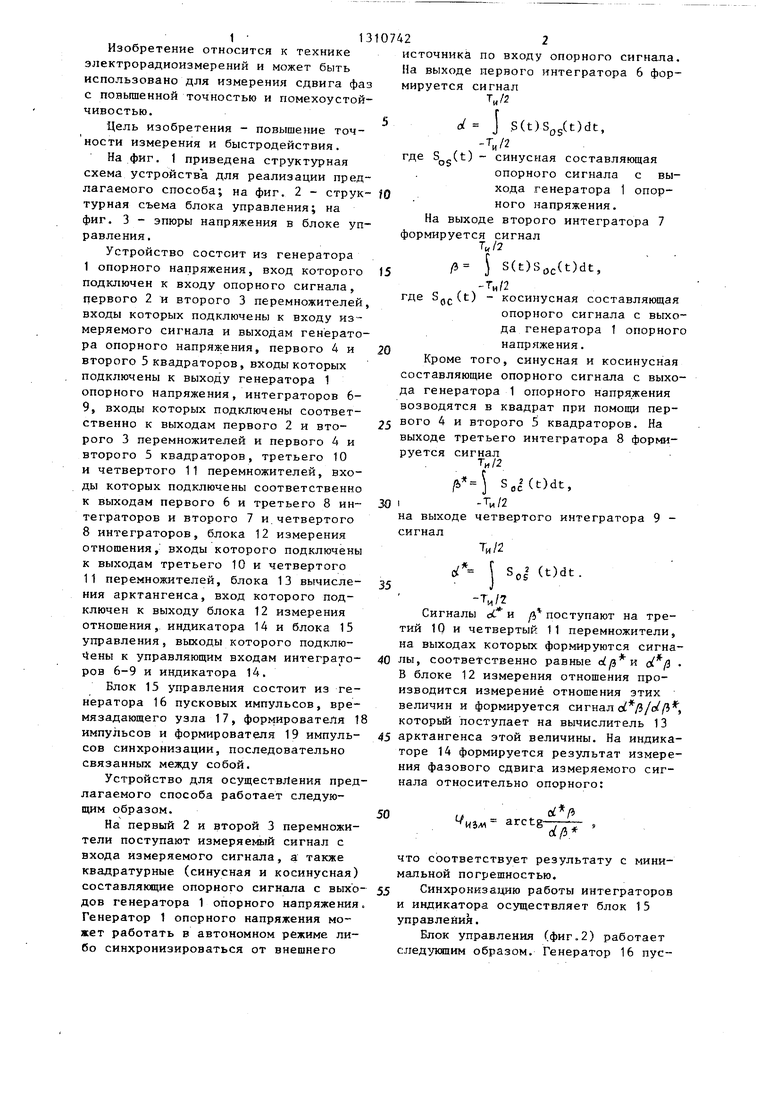
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения фазового сдвига | 1986 |
|
SU1377765A1 |
| Способ измерения амплитуды сигнала | 1986 |
|
SU1465786A1 |
| Способ определения амплитуды сигнала | 1989 |
|
SU1674003A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2005 |
|
RU2281519C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛА | 2003 |
|
RU2239842C1 |
| Способ измерения амплитуды сигнала | 1988 |
|
SU1564557A1 |
| Способ определения фазового сдвига | 1987 |
|
SU1430904A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2000 |
|
RU2196998C2 |
| Устройство изменения фазового сдвига | 1988 |
|
SU1647446A1 |
| Способ определения фазового сдвига | 1988 |
|
SU1651227A2 |
Изобретение касается электроизмерений. Цель - повышение точности измерения и быстродействия сдвига фаз. Способ реализован в устройстве. Цель достигается тем, что на переSft) 8) Разовые радио- М.: Сов. радио, множители 2 и 3 поступают измеряемый сигнал (С) ,а также синусная и косинусная составляющие опорного С с генератора 1 опорного напряжения, которые возводятся в квадрат при помощи квадраторов 4 и 5 . На перемножители 10 и 11с интеграторов 8 и 9 поступают и формируются С, а в блоке 12 измерения отношения производится измерение отношений величин этих С и формируется С, который поступает на вычислитель 13 арктангенса этой величины. На индикаторе 14 формируется результат измерения фазового сдвига измеряемого С относительно опорного С, что соответствует результату с минимальной погрешностью. 3 ил. (Л 4 to . /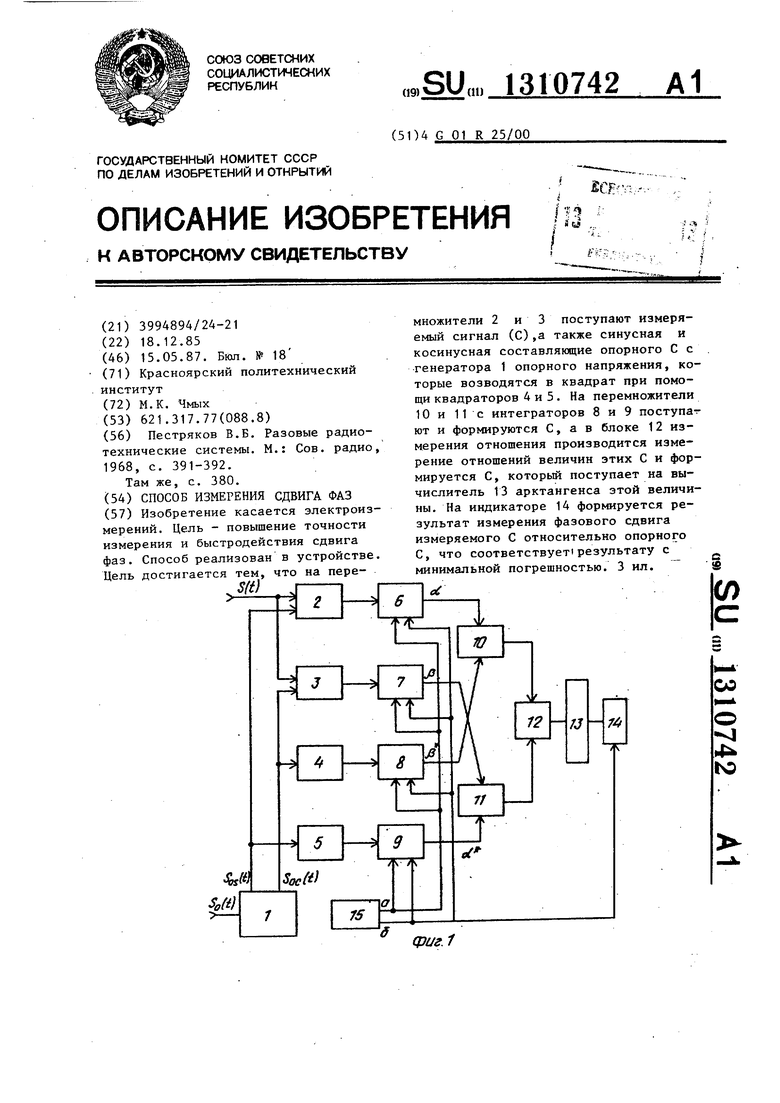
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Ситценабивная машина | 1922 |
|
SU391A1 |
| Там же, с | |||
| Велосипед, приводимый в движение силой тяжести едущего | 1922 |
|
SU380A1 |
