Изобретение относится к релестрое- нню и может быть использовано для автоматической регу,пировки механических .аметров реле, таких как раствор контактов, провал якоря, контактное давление на размыкаюрдах контактах, а также тока срабааъ1вания.
Целью изобретения является повышение производительности и обеспечение возможности автоматизации регулировки
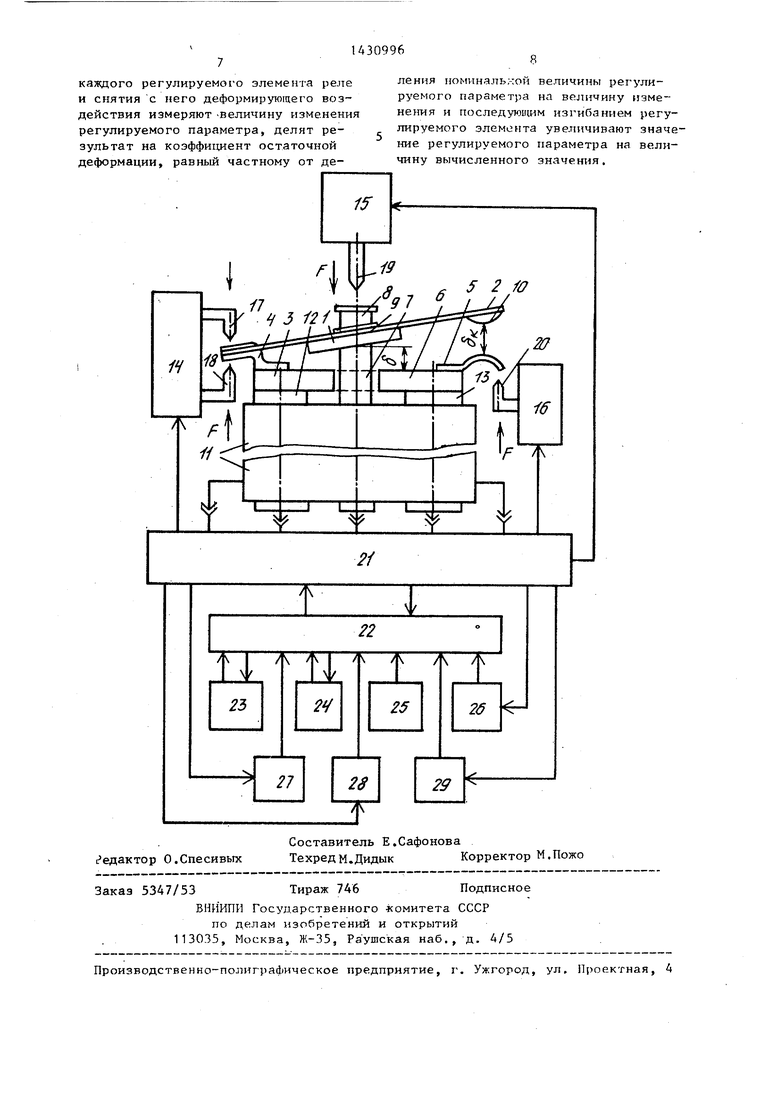
На чертеже представлена блок-схема устройства для осуществления регулировки в соответствии с предложенным способом.
Регулируемое реле содержит якорь 1, укрепленный на плоской контактной пружине 2, которая крепится на одном из полтснь1Х наконечников 3 с помощью стойки 4, неподвижный замыкающий кон- такт 5, закрепленный на другом полюсном наконечнике 6, ограничительную 1стойку 7 с закрепленным на ней неподвижным размыкающим контактом 8, .конгде I, - ток срабатывания реле. А; FJ - значение электромагнитной силы, воздействующей на якорь 1, равУравнение для момента размыкания якоря 1 и полюсных наконечников 3 и 6 из (3) будет иметь вид: г
/UoSn W ii
2 R.;
м f4o
:т
(5)
такты 9, 10, закрепленные на контакт-25 „ое усилию контактирования неподвижной пружине 2. Обмотки.электромагнита „ых размыкающих контактов 8 и 9, Н. 11, сердечники 12, 13.
Устройство для осуществления регулировки реле по предложенному способу содержит регутшрующие механизмы 14 - 30 16 с регулирующими элементами 17- 20, блок 21 управления, вычислительно-сравнивающий блок 22, блоки 23,24 оперативной памяти,и блок 25 постоянной памяти, измеритель 26 тока от- 5 пускания, измеритель 27 усилия, действующего на якорь 16 в момент его размыкания с полюсными наконечниками 3 И 6, измеритель 28 зазора между контактами 5 и 10, измеритель 29 зазора между контактами 8 и 9.
У Уавнение тяговой характеристики электромагнитной системы регулируемого реле получается из зфзвнения Максвелла:45
,и„ 3„ F ,(1)
где Tg - магнитный поток. Eg;
магнитная постоянная, Гн/м;
40
1
где 1 - ток отпускания реле. А; FJ - значение электромагнитной
силы, воздействующей на якорь 1 в момент его размыкания с полюснь1ми наконечниками 3 и 6, Н.
Решая совместно уравнения (4) и (5) относительно, S получаем следующее уравнение:
, S
(WoSn . 1
(6)
в
fl o
5„
Для каждого типа регулируемого реле известны номинальные величины W, S, I,, F, . Их записывают в блок 25
площадь полюсных наконечников 3 и 6, F - значение электромагнитной силы, воздействующей на якорь 1, Н.
Полная намагничивающая с ила электромагнитной системы реле определяется по формуле:
I.W(p,(R,.-;f,:;). (2)
постоянной памяти. В нем также записаны номинальные величины раствора
Q контактов и провала якоря. Измеряя величины IjF у регулируемого реле и вычисляя по формуле (6) величину S , производят регулировку реле так, чтобы в конце регулировки зазор между
JJ якорем I и полюсными наконечниками 3, 6 был равен О , раствор контактов 5 и 10 был равен своей номинальной величине. При этом величина тока сра- батьшания и усилия контактирования
где
1 W
R.. S ток в обмотках М реле. А; число витков в обмотках репе;
сумма магнитных сопротивлений железа и паразитных зазоров (при допущении, что R не зависит от намагничивающей силы), Ом; зазор между якорем 1 и полюсными наконечниками, м. Решая совместно уравнения (J) и (2) относительно F, получаем:
li oSni
2 (RM fu7s« +r) Запишем уравнение (3) для момента размыкания контакта 8 и контакта 10 при срабатывании реле:
р (lloSn- w I
2(
где I, - ток срабатывания реле. А; FJ - значение электромагнитной силы, воздействующей на якорь 1, равF -
(3)
(4)
„ое усилию контактирования неподвиж„ых размыкающих контактов 8 и 9, Н.
Уравнение для момента размыкания якоря 1 и полюсных наконечников 3 и 6 из (3) будет иметь вид: г
/UoSn W ii
2 R.;
м f4o
:т
(5)
„ое усилию контактирования неподвиж„ых размыкающих контактов 8 и 9, Н.
1
где 1 - ток отпускания реле. А; FJ - значение электромагнитной
силы, воздействующей на якорь 1 в момент его размыкания с полюснь1ми наконечниками 3 и 6, Н.
Решая совместно уравнения (4) и (5) относительно, S получаем следующее уравнение:
, S
(WoSn . 1
(6)
Для каждого типа регулируемого реле известны номинальные величины W, S, I,, F, . Их записывают в блок 25
постоянной памяти. В нем также записаны номинальные величины раствора
контактов и провала якоря. Измеряя величины IjF у регулируемого реле и вычисляя по формуле (6) величину S , производят регулировку реле так, чтобы в конце регулировки зазор между
якорем I и полюсными наконечниками 3, 6 был равен О , раствор контактов 5 и 10 был равен своей номинальной величине. При этом величина тока сра- батьшания и усилия контактирования
контактов- 8 и 9 будут равны своим номинальным значениям.
Регулировка по лредложенному способу осуп;ествляется следующим образом.
Предварительно у реле, имеющих раствор контактов 5 и 10 больше номинальной величины и нулевой провал якоря 1, измеряют величину тока отпускания якоря 1 Ij измерителем 26 и записьгоают эту величину в блок 23 оперативной памяти и усилие F. , действующее на якорь 1 в момент размыкания его с полюсными наконечниками 3 и 6 и записывают эту величину в блок 24 оперативной памяти. При записи каждого нового числа в блоки 23 и 24 оперативной памяти ранее записанное число автоматически стирается. По формуле (6) в вычислительно-сравнивающем блоке 22 вычисляют величину S и записывают ее в блок 23 оперативной памяти.
Деформацию каждого регулируемого элемента по предложенному способу проводят одновременно с измерением соответствующего регулируемого параметра и заканчивают в момент равенства измеряемого параметра его номинальной величине, записанной в блоке памяти. После снятия регулирующего воздействия на регулируемый элемент определяют разность между изменившейся величиной регулируемого, параметра за счет упругости материала регулируемого элемента реле и его номинальной величиной. Делят результат на коэффициент ост аточной дефорводят регулировку провала якоря 1 путем изгибания стойки 4 регулирующим механизмом 14. посредством его регулирующего элемента 18 до получения величины зазора между якорем I и полюсными наконечниками 3 и 6, равной номинальной величине провала якоря, записанной в блоке 25 постоянной па0 мяти. Измерение производят измерителем 28. При изгибании стойки 4 изменение величины зазора между якорем 1 и полюсными наконечниками 3 и 6 вызывает пропорциональное изменение
5 зазора между контактами 5 и 10. Величина коэффициента пропорциональности К( для каждого типа регулируемого реле известна и записывается в блок 25 постоянной памяти. Затем производят изгибание контакта 5 регулирую- пщм элементом 20 регулирующего механизма 16 до получения нулевого зазора между контактами 5 и 10 (до момента их касания), После снятия ре5 гулирующего воздействия с контакта 5 измеряют измерителем 29 величину образовавшегося зазора между крнтакта- ми 5 и 10.
В вычислительно-сравнивающем бло0 ке 22 вычисляют произведение этой измеренной величины и коэффициента K.J суммируют результат с номинальной величиной провала якоря 1 и записывают полученную сумму в блок 24 оперативной памяти. Дополнительно изгибают контакт 5 до момента получения зазора между якорем 1 и полюсными наконечниками 3 и 6, равного величине, записанной в блоке 24 оперативной
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулировки раствора контактов,провала якоря,напряжения срабатывания и усилия контактного нажатия электромагнитного реле клапанного типа | 1985 |
|
SU1328860A1 |
| Способ регулировки напряжения срабатывания,раствора и провала контактов электромагнитного реле клапанного типа | 1985 |
|
SU1309110A1 |
| Способ регулировки дополнительногоХОдА яКОРя элЕКТРОМАгНиТНОгО РЕлЕКлАпАННОгО ТипА | 1979 |
|
SU817787A1 |
| Устройство для контроля рабочих зазо-POB элЕКТРОМАгНиТНОгО РЕлЕ | 1977 |
|
SU809069A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2016 |
|
RU2653532C2 |
| Способ регулирования контактного зазора переключающей контактной группы | 1976 |
|
SU708430A1 |
| Устройство для измерения механических параметров электромагнитных аппаратов | 1980 |
|
SU1091123A1 |
| Способ контроля параметров контактной системы реле | 1976 |
|
SU648952A1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 1993 |
|
RU2050618C1 |
Изобретение может быть использовано для регулировки механических параметров реле. Цель изобретения - повышение производительности и обеспечение возможности автоматизации регулировки. Деформацию каждого регулируемого элемента проводят одновременно с измерением соответствующего регулируемого параметра и заканчивают в момент равенства измеряемо- , го параметра его номинальной величине, записанной в блоке памяти. После снятия регулирующего воздействия на регулируемый элемент определяют разность между изменившейся величиной регулируемого параметра за счет упругости материала регулируемого элемента реле и его номинальной величиной, делят результат на коэффициент остаточной деформации, равный частному от деления номинальной величины регулируемого параметра на изменив- щуюся величину, суммируют его с изменившейся величиной регулируемого параметра, записывают полученную сумму в блок оперативной памяти и дополнительно изгибают регулируемый эле- : мент до момента равенства величины регулируемого параметра величине, записанной в блоке памяти. Все вычисления и сравнения величин параметров производят в вычислительно-сравнивающем блоке. После повторного снятия регулирующего воздействия на регули- , руемый элемент величина регулируемого параметра будет равна своему номи-f нальному значению. Погрешность регулировки реле предложенным способом за счет инерционных свойств регулирующих элементов исключается, так как приращение величины регулируемого параметра, полученное при этом, компенсируется при допол1штельной деформации регулируемого элемента. 1 ил. « (Л 4 00 о Од
мации, равный частному от деления но- 40 памяти. Затем производят регулировмннальной величины регулируемого параметра к изменившейся величине, суммируют его с изменившейся величиной регулируемого параметра, записывают полученную сумму в блок 24 оператив- ной памяти и дополнительно изгибают регулируемый элемент до момента равенства величины регулируемого параметра величине, записанной в блоке 24 памяти. Все вычисления и сравне- ние величин параметров производят в вычислительно сравнивающем блоке 23.
После повторного снятия регулирующего воздействия на регулируемый элемент величина регулируемого пара- метра будет равна своему номинальном значению.
Последовательность регулировочных операций следуюп(ая: вначале произку раствора контактов 5 и 10. С этой целью изгибают стойку 4 регулирующим механизмом 14 посредством его регулирующего элемента 17 до получения зазора между якорем 1 и полюсными наконечниками 3 и 6, равного величине, записанной в блоке 23 оперативной памяти. Изгибают стойку 7 регулирующим элементом 19 регулирующего механизма 15 до получения нулевого зазора между контактами 8 и 9 (до момента их касания), Измеряют измерителем 29 зазор между этими контактами после снятия регулирующего воздействия на стойку. Вычисляют в вычислительно-сравнивающем блоке 22 разность между величиной , -записанной в блоке оперативной памяти, и измеренной величиной. Записывают результат в
блок 2А оперативной памяти. Дополнительно изгибают стойку 7 до получения зазора между якорем I и полюсными наконечниками 3 и 6, равного ве- личине,записанной в блоке 24 оперативной памяти. Вновь изгибают стойку 4 регулирующим элементом 17 регулирующего механизма 14 до получения величины раствора контактов 5 и 10 из- меряемого измерителем- 28, равного номинальной величине, записанной в блоке 25 памяти.
Погрешность регулировки реле предложенным способом за счет инерцион- ных свойств регулирующих элементов 17-20 исключается,так как приращение величины регулируемого параметра полученное при этом компенсируется при дополнительной деформации регулируе- мого элемента. Поэтому скорость изменения регулируемых параметров при воздействии на регулируемые элементы может быть соизмеримой с временем измерения регулируемого параметра. Так применение в измерителях 26 - 29 аналого-цифрового преобразователя (АЦП) серии К572ПВ2А, у которого время измерения равно 0,3 с при соблюдении условия, что погрешность регулировки должна быть не более 3 мкм, позволяет регулировать регулируемые параметры со скоростью 10 мкм/с, позволяет затрачивать на всю регулировку реле не более 1 мин. В то же время при регу- лировке по способу прототипа время регулирования составляет не менее 13 мин, т.е. оператор регулирует 37 реле в смену. Применение способа позволяет повысить производительность регулировки в 8-13 раз. Вычисление значения S в зависимости от величины 1, и FJ позволяет учитывать индивидуальные особенности регулируемого реле, такие как качество сборки разброс магнитных и механических ха- рактеристик материалов элементов конструкции реле.
Формула изобретения
Способ регулировки электромагнитного реле клапанного типа с совмещенными контактной и возвратной пружинами, заключающийся в подаче на- пряжения на обмотку реле, измерении параметров срабатывания, раствора контактов, провала якоря и изменении
в зависимости от измеренных значений высоты подъема якоря и неподвижного замыкающего контакта путем изгибания деталей крепления возвратной пружины, неподвижного размыкающего и неподвижного замыкающего контакта до получения раствора контактов, болшего заданного значения, и провала якоря, равного номинальной величине, отличающийся тем, что, с целью повышения производительности и обеспечения возможности автоматизации регулировки, в качестве параметра срабатьшания измеряют ток срабатьшания, затем измеряют ток опускания и силу, действующую на якорь в момент отпускания якоря после его срабатьгоания, и в зависимости от полученных результатов вычисляют значение величины зазора между якорем и полюсными наконечниками, определяемое по формуле
I (oSn .It 1г.
I р, , 4Fi
где
7
- величина зазора между якорем и полюсными наконечниками, м;
W - число витков обмоТКИ-релеJ. гЦд - магнитная постоянная, Гн/м; S - площадь полюсных наконечников, I - номинальная величина тока
срабатывания реле А; F - номинальная величина усилия, действукнцего на якорь в момент размыкания размыкающих контактов при срабатывании реле, Н; Iij - измеряемая величина тока
опускания реле. А; F - измеряемая величина усилия, действующего на якорь в момент его размыкания с полюсными наконечниками, при опускании реле, Н;
и изгибают стойку крепления пружины до получения величины зазора между якорем и полюсными наконечниками, равной вычисленной величине S , а затем изгибают ограничительную стойку до получения нулевого зазора между неподвижным размыкающим контактом и контактом пружины и вновь изгибают стойку крепления пружины до получения номинальной величины раствора контактов, причем после деформации
каждого регулируемого элемента реле и снятия с него деформирующего воздействия измеряют -величину изменения регулируемого параметра, делят результат на коэффи1Ц1ент остаточной деформации, равный частному от деления номушалькой величины регулируемого параметра на величину изменения и последуюи1им изгибанием регулируемого элемента увеличивают значение регулируемого параметра на величину вычисленного значения.
| Способ регулирования контактного давления размыкающих контактов | 1977 |
|
SU705551A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ регулирования контактного зазора переключающей контактной группы | 1976 |
|
SU708430A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического регулирования межконтактного зазора реле | 1982 |
|
SU1026188A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля параметров реле | 1985 |
|
SU1315943A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
