.1
фие.1
Изобретение относится к оптическим устройствам и может быть использовано в медицинских и технологических лазерных установках, осветитель- ных системах, в устройствах управления излучением импульсных и непрерывных лазеров.
Цель изобретения - повышение эф- фе1 тивности использования апертуры и исключение фокусировки излучения вну ,ри шарнира, а также уменьшение потерь на отражение и упрощение изготовления.
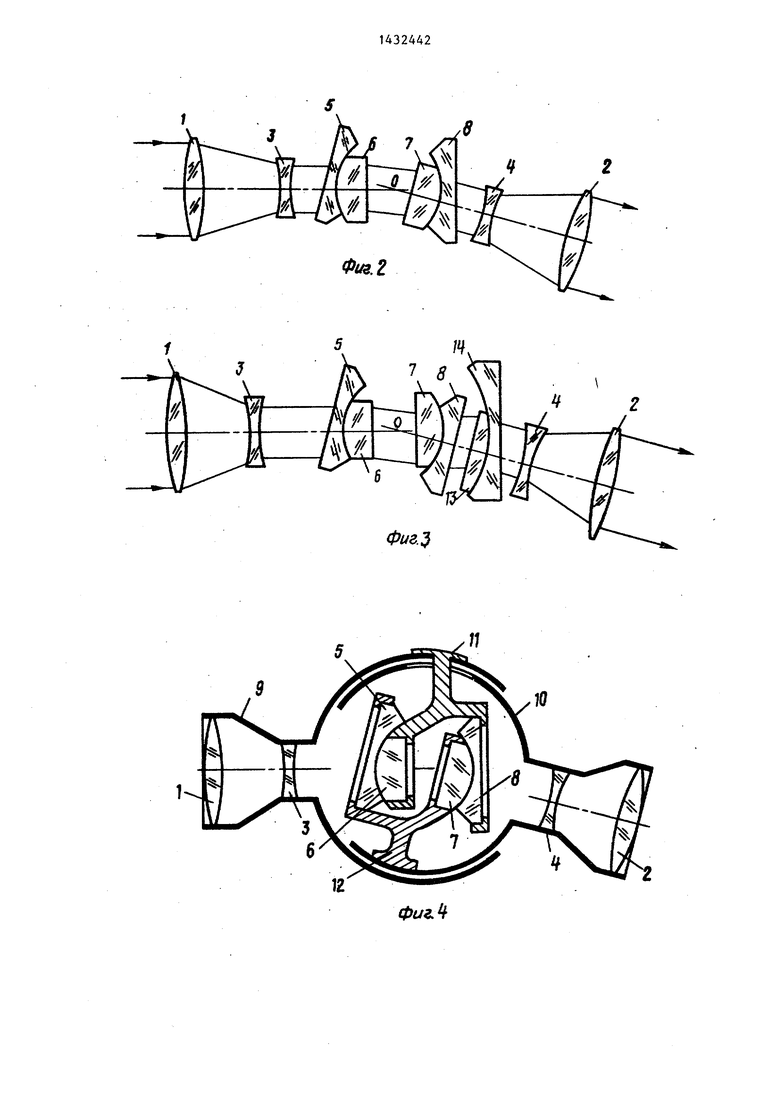
На фиг. 1 изображены оптическая схема шарнира с одной парой оптических элементов, а также ход лучей при повороте подвижного корпуса ,на фиг.2 и 3 - то же, с двумя и тремя оптических элементов соответственно,- на фиг. 4 - оптический шарнирj на фиг. 5 и 6 - графики зависимости погрешности шарнира от угла поворота подвижного светозащитного корпуса.
Оптический шарнир (фиг. }) содержит положительные 1 и 2 и отрицательные 3 и 4 линзы, а также установленные в шарнирном сочленении оптические элементы 5 и 6. Положительная 1 и отрицательная 3 линзы установлены в неподвижном светозащитном корпусе последовательно по ходу оптического пучка и образуют входную телескопическую систему. Отрицательная 4 и положительная 2 линзы установлены последовательно по ходу оптического пучка в подвижном корпусе и образуют выходную телескопическую систему.Оптические элементы 5 и 6, расположен- ные последовательно по ходу оптического пучка в шарнирном сочленении и механически жестко связанные соответственно с подвижньм и неподвижным корпусами (не показаны), обеспечи- вают отклонение оптического пучка при повороте подвижного корпуса относительно неподвижного. При этом один из элементов пары 5 выполнен плосковогнутым, другой 6 - плоско- выпуклым, элементы пары соприкасаются неплоскими поверхностями, а центры кривизны этих поверхностей совпадают с центром шарнирного сочленения. Сферическая форма соприкасающихся поверх- ностей оптических элементов 5 и 6 обеспечивает поворот в любой плоскости, следовательно, шарнир имеет две степени свободы.
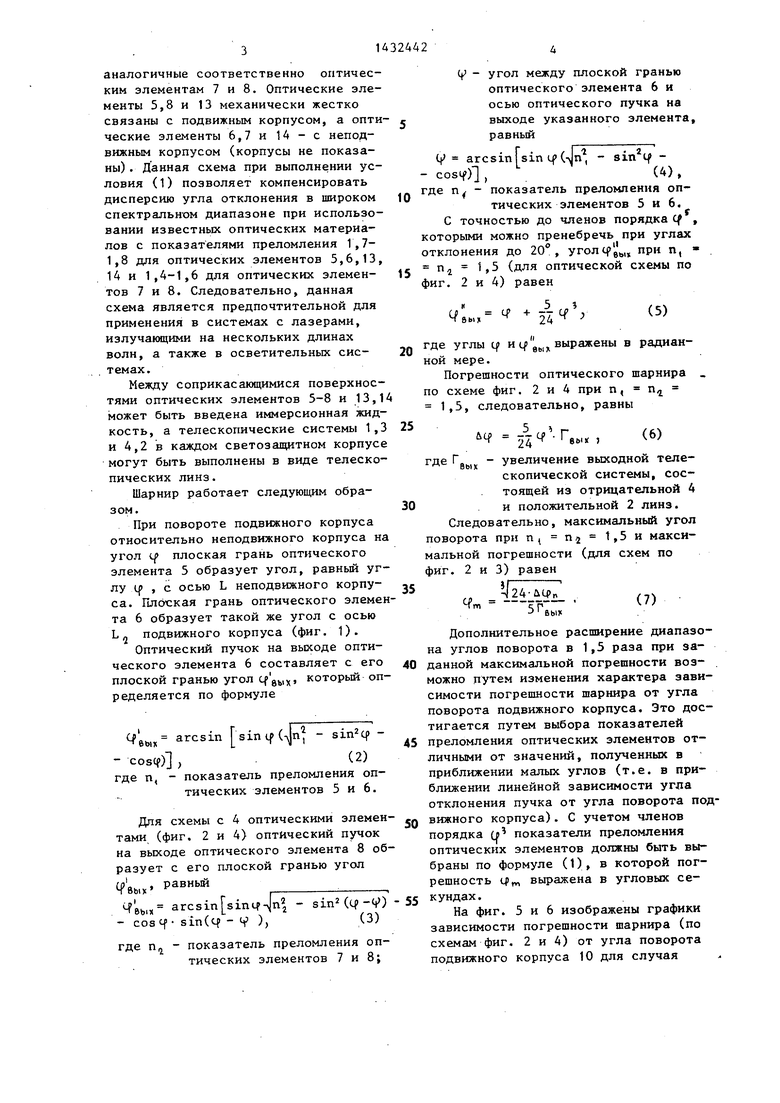
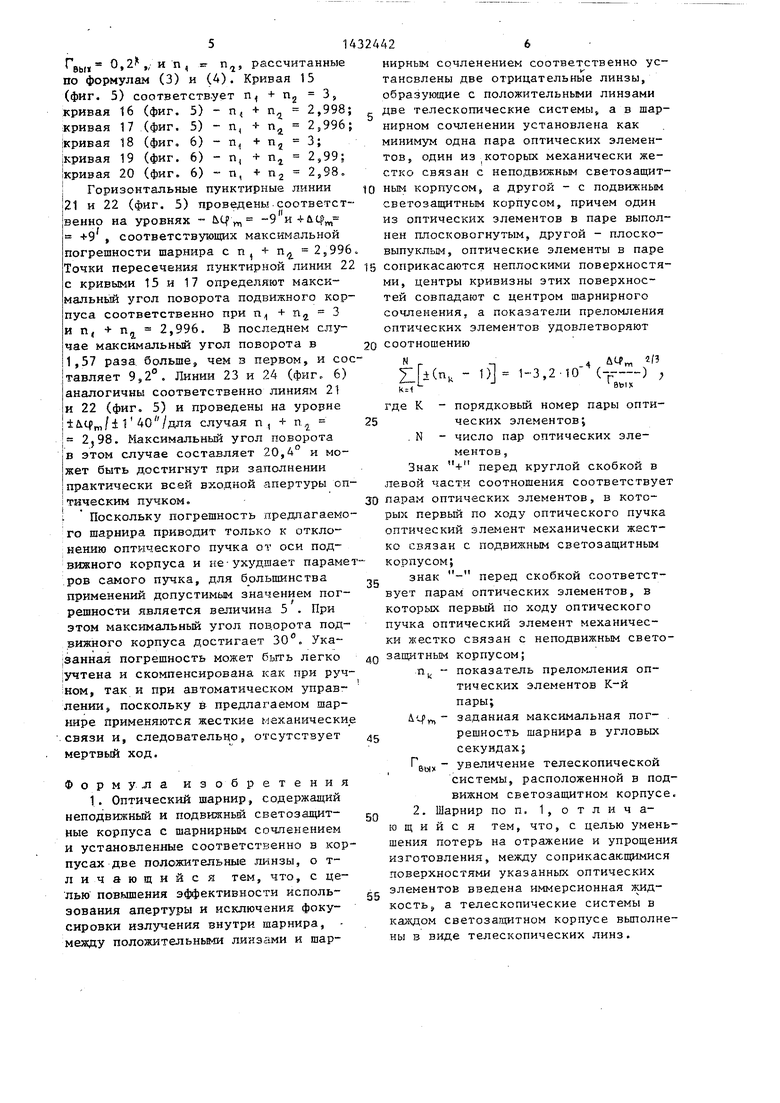
Кроме того, возможен вариант оптической схемы (фиг, 2 и 4), в котором в шарнирном сочленении дополнительно установлены оптические элементы 7 и 8, симметричные соответственно элементам 6 и 7 относительно центра шарнирного сочленения. Оптические элементы 6 и 8 механически жестко связаны с неподвижным светоэа1цитны 1 корпусом 9, а оптические элементы 5 и 7 - с подвижным светозащитным корпусом 10 при помощи кронштейнов 11 и 12 соответственно.
Показатели преломления оптических элементов 5-8 удовлетворяют соотношению
(пк-1) 1-з,2.to-),
к.л - еых
(1)
где К - порядковый номер пары оптических элементов; N - число пар оптических элементов (в предыдущем варианте исполнения оптического шарнира 4на фиг. 1 1) Знак + перед круглой скобкой в левой части соотношения соответствует парам оптических элементов, в которых первый по ходу оптического пучка оптический элемент механически жестко связан с подвижньм корпусом;
знак - перед скобкой соответствует парам оптических элементов, в которых первый по ходу оптического пучка оптический элемент механически жестко связан с неподвижньм светозащитным корпусом.
п - показатель преломления оптических элементов К-й пары;
йц) - заданная максимальная погрешность шарнира в угловых секундах;
бы увеличение телескопической системы 4 и 2, расположенной в подвижном светозащитном корпусе 10. Показатели преломления п находятся в диапазоне 1,3-1,7, что дает возможность выбирать широко распространенные и технологические оптические материалы в широком спектральном диапазоне.
Возможен также вариант оптической схемы (фиг, 3), в котором в шарнирном сочленении дополнительно установлены оптические элементы 13 и 14,
аналогичные соответственно оптическим элементам 7 и 8. Оптические элементы 5,8 и 13 механически жестко связаны с подвижным корпусом, а опти ческие элементы 6,7 и 14 - с неподвижным корпусом (корпусы не показаны) . Данная схема при выполнении условия (1) позволяет компенсировать дисперсию угла отклонения в широком спектральном диапазоне при использовании известньк оптических материалов с показателями преломления 1,7- 1,8 для оптических элементов 5,6,13, 14 и 1,4-1,6 для оптических элемен- тов 7 и 8. Следовательно, данная схема является предпочтительной для применения в системах с лазерами, излучающими на нескольких длинах волн, а также в осветительных сие- темах.
Между соприкасающимися поверхностями оптических элементов 5-8 и 13,1 может быть введена иммерсионная жидкость, а телескопические системы 1,3 и 4,2 в каждом светозащитном корпусе могут быть выполнены в виде телескопических линз.
Шарнир работает следующим образом.
При повороте подвижного корпуса относительно неподвижного корпуса на угол if плоская грань оптического элемента 5 образует угол, равньй углу If , с осью L неподвижного корпу- са. Плоская грань оптического элемента 6 образует такой же угол с осью L подвижного корпуса (фиг. 1).
Оптический пучок на выходе оптического элемента 6 составляет с его плоской гранью угол tf awx который определяется по формуле
бых arcsin sintf (л|п - -coscf) ,(2) где n, - показатель преломления оптических элементов 5 и 6.
Для схемы с 4 оптическими элементами (фиг. 2 и 4) оптический пучок на выходе оптического элемента 8 образует с его плоской гранью угол
Ч вых .
4 6j,,, arcsin sinM - |n j - )
-cos tf- sin(tf - V ))(3)
где n,j - показатель преломления оптических элементов 7 и 8;
угол между плоской гранью оптического элемента 6 и осью оптического пучка на выходе указанного элемента, равный
( arcsini sin Ц (, - - - cosif) (4) ,
где п - показатель преломления оптических элементов 5 и 6. С точностью до членов порядка if , которыми можно пренебречь при углах отклонения до 20°, уголЦ,, при п, п 1,5 (для оптической схемы по фиг. 2 и 4) равен
вь-, Й
(5)
где углы qj и ц) выражены в радиан- ной мере.
Погрешности оптического шарнира по схеме фиг. 2 и 4 при п, п 1,5, следовательно, равны
f 2| -Гвь.. , (6) где Г - увеличение выходной телескопической системы, состоящей из отрицательной 4 и положительной 2 линз. Следовательно, максимальный угол поворота при п максимальной погрешности (для схем по фиг. 2 и 3) равен
д, -(24 Чт
5Г
(7)
ВЫ)
Дополнительное расширение диапазона углов поворота в 1,5 раза при заданной максимальной погрешности возможно путем изменения характера зависимости погрешности шарнира от угла поворота подвижного корпуса. Это достигается путем выбора показателей преломления оптических элементов отличными от значений, полученных в приближении малых углов (т.е. в приближении линейной зависимости угла отклонения пучка от угла поворота подвижного корпуса). С учетом членов порядка (0 показатели преломления оптических элементов должны быть выбраны по формуле (1), в которой погрешность ср„ выражена в угловых секундах.
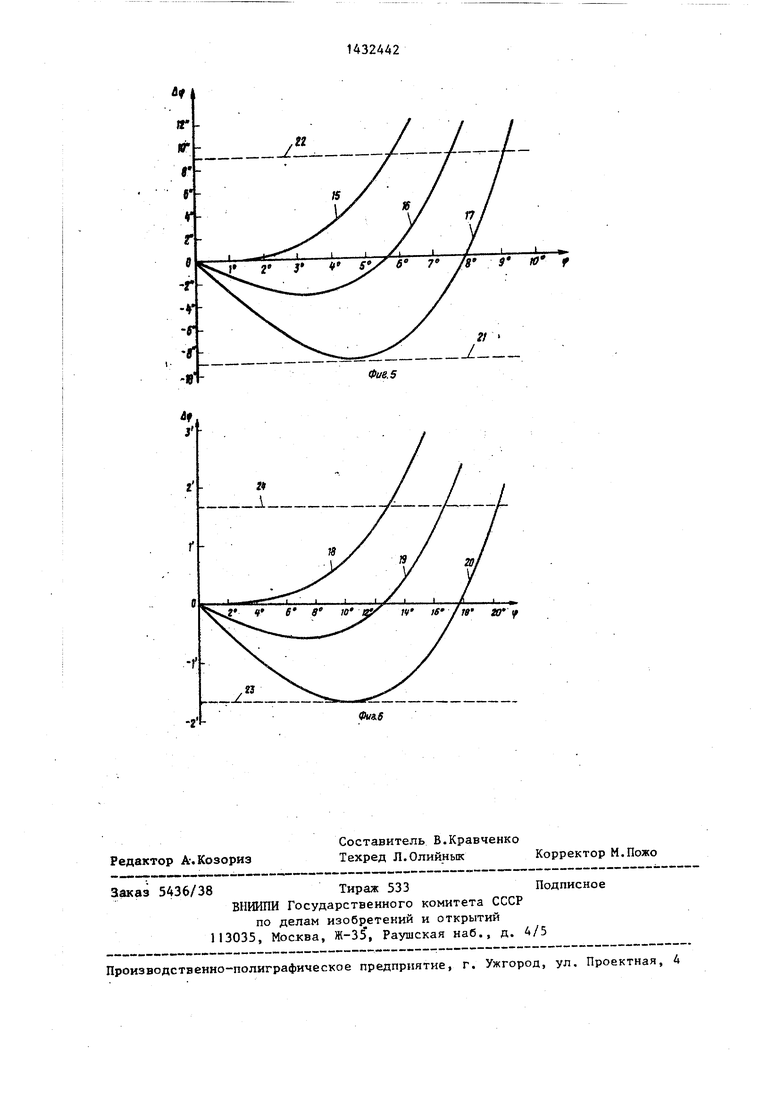
На фиг. 5 и 6 изображены графики зависимости погрешности шарнира (по схемам фиг, 2 и 4) от угла поворота подвижного корпуса 10 для случая
вы« 0,2 „и п, :
по формулам (3) и (4). Кривая 15
7
рассчитанные
Горизонтальные пунктирные линии 21 и 22 (фиг. 5) проведены соответственно на уровнях bCf у -9 и +9 , Соответствующих максимальной погрешности шарнира с п + п 25996
Точки пересечения пунктирной линии 22 tg соприкасаются неплоскими поверхностянирным сочленением соответственно установлены две отрицательные линзы, образующие с положительными линзами g две телескопические системы, а в шарнирном сочленении установлена как минимум одна пара оптических элементов , один из которых механически жестко связан с неподвижным светозащит- 10 ным корпусом, а другой - с подвижным светозащитным корпусом, причем один из оптических элементов в паре выполнен гшосковогнутым, другой - плосковыпуклым, оптические элементы в паре
нирным сочленением соответственно установлены две отрицательные линзы, образующие с положительными линзами две телескопические системы, а в шарнирном сочленении установлена как минимум одна пара оптических элементов , один из которых механически жестко связан с неподвижным светозащит- ным корпусом, а другой - с подвижным светозащитным корпусом, причем один из оптических элементов в паре выполнен гшосковогнутым, другой - плосковыпуклым, оптические элементы в паре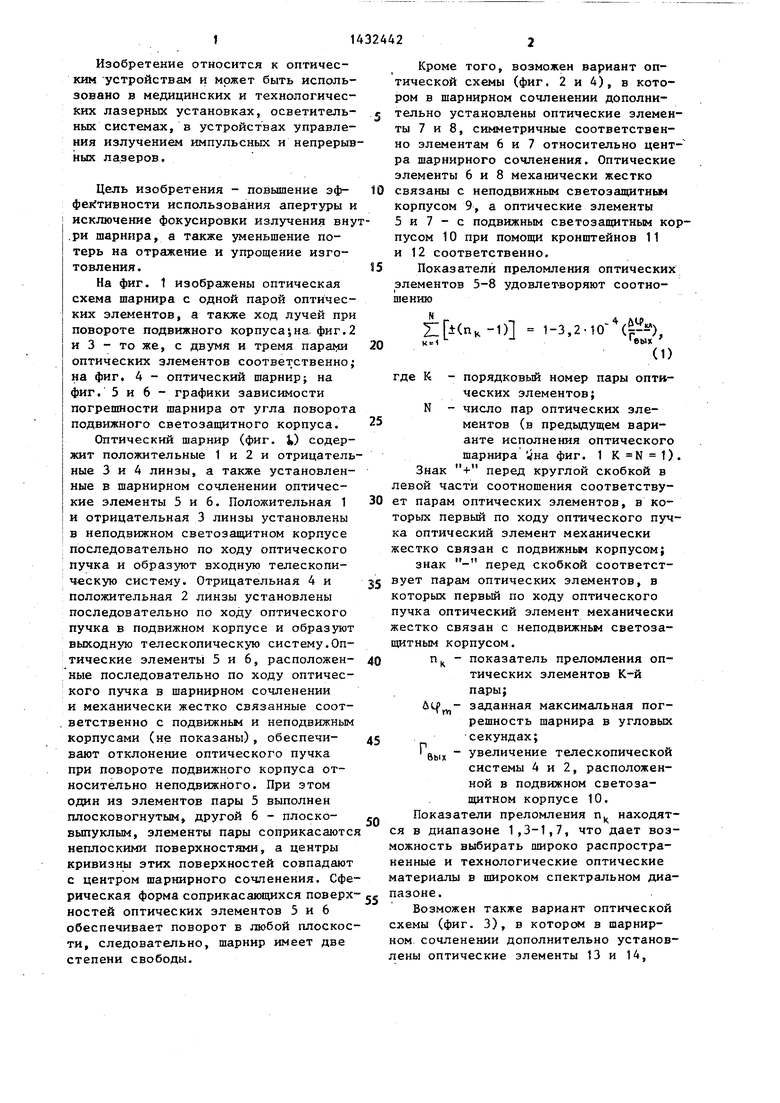
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический шарнир | 1985 |
|
SU1280559A1 |
| Оптический шарнир | 1983 |
|
SU1112332A1 |
| РЕФРАКТОМЕТР | 1992 |
|
RU2049985C1 |
| Сканирующая система | 1982 |
|
SU1064262A1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КОРОМЫСЛА ВРУБОВОЙ МАШИНЫ НА ОСНОВЕ ОПТОВОЛОКОННЫХ ИЗМЕРЕНИЙ | 2020 |
|
RU2766054C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУЧКОМ | 2010 |
|
RU2567177C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНЫХ ХАРАКТЕРИСТИК | 1992 |
|
RU2124701C1 |
| Устройство для биомикрогониоскопии глаза | 1980 |
|
SU938922A2 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПОТЕНЦИОМЕТР | 1995 |
|
RU2100875C1 |
| УСТАНОВКА ДЛЯ ЛАЗЕРНОЙ ОБРАБОТКИ КОЛЬЦЕВЫМ ПУЧКОМ | 1990 |
|
RU2068328C1 |
Изобретение относится к оптическим устройствам и может быть использовано для управления излучением при повьшении эффективности использования апертуры, исключении фокусировки внутри устройства, малых потерях на отражение и упрощении изготовления. Оптический шарнир содержит положительные линзы 1 и 2, отрицательные линзы 3 и 4, а также установленную в шарнирном сочленении как минимум одну пару оптических элементов 5 и 6. Линзы 1 и 3 , установленные в неподвижном светозащитном корпусе, образуют входную телескопическую систему, а линзы 4 и 2, установленные в подвижном светозащитном корпусе, выходную телескопическую систему. Элементы 5 и 6 механически жестко связаны соответственно с подвижным и неподвижным корпусами и обеспечивают отклонение оптического пучка при повороте подвижного корпуса относительно неподвижного. Элемент 5 выполнен плосковогнутым, а элемент 6- плосковыпук- лым. Элементы 5 и 6 соприкасаются неплоскими поверхностями, а центры кривизны этих поверхностей совпадают с центром шарнирного сочленения.Сферическая форма соприкасающихся поверхностей элементов 5 и 6 обеспечивает поворот в любой плоскости, т.е. устройство имеет две степени свободы. Приведена математическая зависимость, связывающая показатели преломления оптических элементов с заданной погрешностью устройства и увеличением выходной телескопической системы. Между соприкасакяцш-шся поверхностями элементов 5 и 6 может быть введена иммерсионная жидкость, а телескопические системы могут быть выполнены в виде телескопических линз. 1 э.п. ф-ль1, 6 ил. с (Л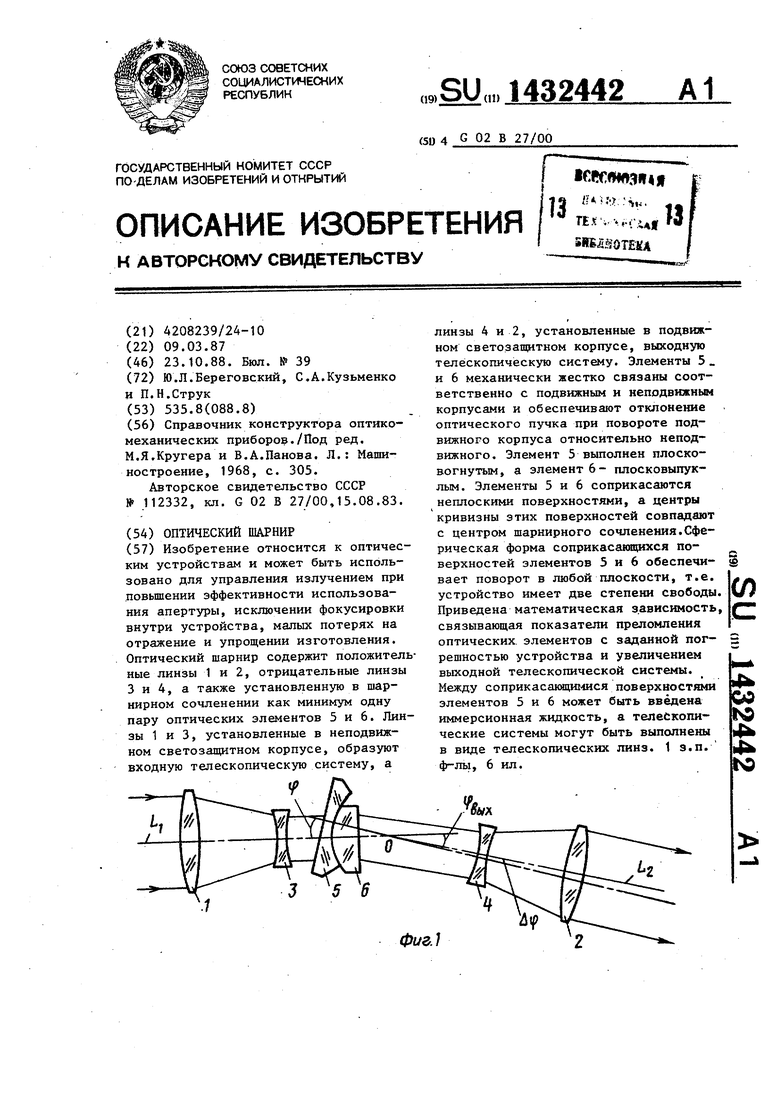
с кривыми 15 и 17 определяют максимальный угол поворота подвижного корпуса соответственно при п + п, 3
п, п 2,996. В последнем случае максимальный угол поворота в 1,57 раза больше, чем з первом, и со тавляет 9,2°. Линии 23 и 24 (фиг. 6) аналогичны соответственно линиям 21 1и 22 (фиго 5) и проведены на урорне |±uiq)/i 1 случая п, + п. 1 2j98. Максимальный угол поворота IB этом случае составляет 20,4° и может быть достигнут при заполнении практически всей входной апертуры оп |тическим пучком.
. Поскольку погрешность ;преддагаемо го шарнира приводит только к откло- :нению оптического пучка от оси подвижного корпуса и не-ухудшает параме ,ров самого пучка, для большинства применений допустимым значением погрешности является величина 5 . При этом максимальный угол пов.орота подвижного корпуса достигает 30. Ука- ;занная погрешность может быть легко |учтена и скомпенсирована как при руч- :ном, так и при автоматическом управлении, поскольку в предлагаемом шар- j-шре применяются жесткие механические .связи и, следовательно, отсутствует мертвый ход.
Формула изобретения
N г--14
У1|±(п - 1)1 1-3,(-.г) ;
,. ,
где к BtolS
порядковый номер пары опти- 5 ческих элементов;
. N - число пар оптических элементов 5
Знак + перед круглой скобкой в левой части соотношения соответствует 0 парам оптических элементов, в которых первый по ходу оптического пучка оптический элемент механически жестко связан с подвижным светозащитным корпусом;
5
5
0
5
знак - перед скобкой соответствует парам оптических элементов, в которых первый по ходу оптического пучка оптический элемент механически х естко связан с неподвижным светозащитным корпусом;
.Hj, -- показатель преломления оптических элементов К-й пары;
- заданная максимальная пог- . решность шарнира в угловых секундах; увеличение телескопической
системы, расположенной в подвижном светозащитном корпусе. 2. Шарнир по п. 1, о т л н ч а- ю щ и и с я тем, что, с целью уменьшения потерь на отражение и упрощения изготовления, между соприкасающимися поверхностями указанных оптических элементов введена иммерсионная яшд- KOCTbj а телескопические системы в каждом светозаш 1тном корпусе вьтолне- ны в виде телескопических линз.
Фиа,2
Фие.
фиг.
Фие.5
Финб
| Справочник конструктора оптико- механических приборов./Под ред | |||
| М.Я.Кругера и В.А.Панова | |||
| Л.: Машиностроение, 1968, с | |||
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
| Устройство для намотки проволоки на замкнутые кольцевые сердечники | 1957 |
|
SU112332A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
